
Sensor-Integrated Chairs for Lower Body Strength and Endurance Assessment

Abstract
:1. Introduction
2. Materials and Methods
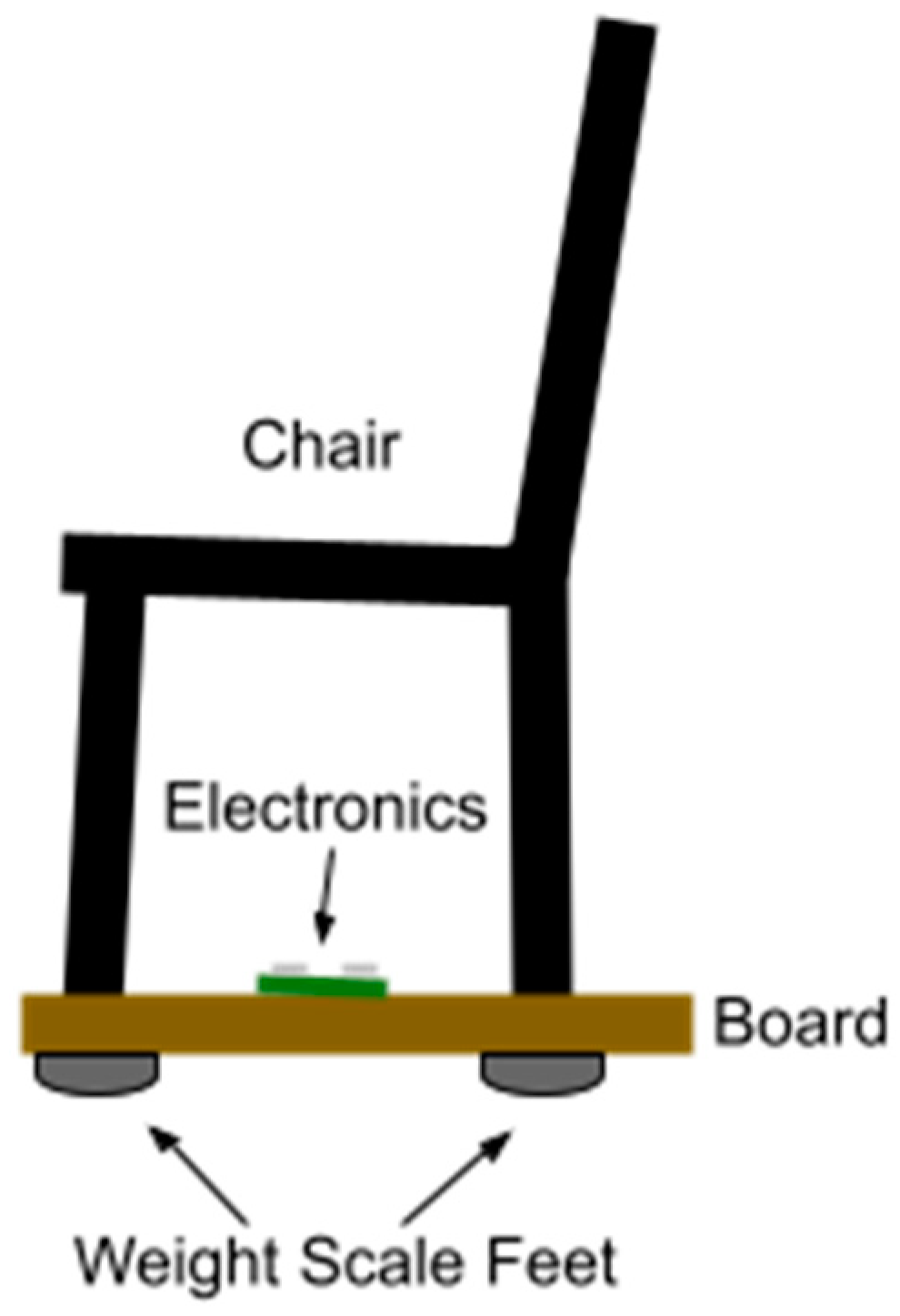
2.1. Sensor Integration
2.2. Microcontroller Platform
2.3. Software and System
3. Results
3.1. Functional Testing
3.2. Validation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Balogun, S.; Winzenberg, T.; Wills, K.; Scott, D.; Jones, G.; Callisaya, M.; Aitken, D. Prospective associations of low muscle mass and strength with health-related quality of life over 10-year in community-dwelling older adults. Exp. Gerontol. 2019, 118, 65–71. [Google Scholar] [CrossRef] [PubMed]
- Ambrose, A.F.; Paul, G.; Hausdorff, J.M. Risk factors for falls among older adults: A review of the literature. Maturitas 2013, 75, 51–61. [Google Scholar] [CrossRef] [PubMed]
- Jones, C.J.; Rikli, R.E.; Beam, W.C. A 30-s Chair-Stand Test to Measure Lower Body Strength in Community-Residing Older Adults. J. Aging Phys. Act. 2000, 8, 85. [Google Scholar] [CrossRef] [PubMed]
- Różańska-Kirschke, A.; Kocur, P.; Wilk, M.; Dylewicz, P. The Fullerton Fitness Test as an index of fitness in the elderly. Med. Rehabil. 2006, 10, 9–16. [Google Scholar]
- Jones, C.J.; Rikli, R.E. Measuring functional fitness of older adults. J. Act. Aging 2002, 1, 24–30. [Google Scholar]
- Zhang, Q.; Li, Y.-X.; Li, X.-L.; Yin, Y.; Li, R.-L.; Qiao, X.; Li, W.; Ma, H.-F.; Ma, W.-H.; Han, Y.-F.; et al. A comparative study of the five-repetition sit-to-stand test and the 30-second sit-to-stand test to assess exercise tolerance in COPD patients. Int. J. Chronic Obstr. Pulm. Dis. 2018, 13, 2833. [Google Scholar] [CrossRef] [PubMed]
- Pozaic, T.; Lindemann, U.; Grebe, A.K.; Stork, W. Sit-to-stand transition reveals acute fall risk in activities of daily living. IEEE J. Transl. Eng. Health Med. 2016, 4, 2700211. [Google Scholar] [CrossRef] [PubMed]
- University of Delaware 5X Sit-to-Stand Test (5XSST). Available online: https://www.thompsonhealth.com/Portals/0/_RehabilitationServices/PT%20Mgmt%20of%20Knee/5XSST_handout.pdf (accessed on 27 November 2023).
- Center for Disease Control and Prevention Assessment 30-Second Chair Stand. Available online: https://www.cdc.gov/steadi/pdf/STEADI-Assessment-30Sec-508.pdf (accessed on 27 November 2023).
- Millor, N.; Lecumberri, P.; Gómez, M.; Martinez-Ramirez, A.; Izquierdo, M. An evaluation of the 30-s chair stand test in older adults: Frailty detection based on kinematic parameters from a single inertial unit. J. NeuroEngineering Rehabil. 2013, 10, 86. [Google Scholar] [CrossRef] [PubMed]
- Cobo, A.; Ferre, X.; Escalante, W.; Moral, C. Automatic and Real-Time Computation of the 30-Seconds Chair-Stand Test without Professional Supervision for Community-Dwelling Older Adults. Sensors 2020, 20, 5813. [Google Scholar] [CrossRef] [PubMed]
- Hellmers, S.; Fudickar, S.; Lau, S.; Elgert, L.; Diekmann, R.; Bauer, J.M.; Hein, A. Measurement of the Chair Rise Performance of Older People Based on Force Plates and IMUs. Sensors 2019, 19, 1370. [Google Scholar] [CrossRef] [PubMed]
- Gonçalves, J.; Batista, J.; Novo, A. Fully-Automated “Timed Up and Go” and “30-Second Chair Stand” Tests Assessment: A Low-Cost Approach Based on Arduino and LabVIEW. In CONTROLO’2014, Proceedings of the 11th Portuguese Conference on Automatic Control, Porto, Portugal, 21–23 July 2014; Springer International Publishing: New York, NY, USA, 2015; pp. 669–678. [Google Scholar]
- Takeshima, N.; Kohama, T.; Kusunoki, M.; Fujita, E.; Okada, S.; Kato, Y.; Kofuku, K.; Islam, M.M.; Brechue, W. Development of Simple, Objective Chair-Standing Assessment of Physical Function in Older Individuals Using a Kinect™ Sensor. J. Frailty Aging 2019, 8, 186–191. [Google Scholar] [PubMed]
- Cobo, A.; Hayn, D.; Ferre, X.; Moral, C. Portable Ultrasound-Based Device for Detecting Older Adults’ Sit-to-Stand Transitions in Unsupervised 30-Second Chair–Stand Tests. Sensors 2020, 20, 1975. [Google Scholar] [CrossRef] [PubMed]
- Dy, H.K.; Yeh, C. Assessing Lower Limb Strength using Internet-of-Things Enabled Chair and Processing of Time-Series Data in Google GPU Tensorflow CoLab. arXiv 2022, arXiv:2209.04042. [Google Scholar]
- SparkFun Electronics SEN-10245. Available online: https://www.sparkfun.com/products/10245 (accessed on 27 November 2023).
- ESP Easy. Available online: https://espeasy.readthedocs.io/en/latest/Plugin/P067.html (accessed on 27 November 2023).
- Avia Semiconductor HX711. Available online: http://en.aviaic.com/detail/730856.html (accessed on 27 November 2023).
- Nuvoton Technology NAU7802. Available online: https://www.nuvoton.com/resource-files/NAU7802%20Data%20Sheet%20V1.7.pdf (accessed on 27 November 2023).
- Texas Instruments ADS1231. Available online: https://www.ti.com/lit/ds/symlink/ads1231.pdf (accessed on 27 November 2023).
- Texas Instruments ADS1222. Available online: https://www.ti.com/lit/ds/symlink/ads1222.pdf (accessed on 27 November 2023).
- Espressif Systems ESP32 Wi-Fi & Bluetooth SoC. Available online: https://www.espressif.com/sites/default/files/documentation/esp32-wroom-32_datasheet_en.pdf (accessed on 27 November 2023).
- Maier, A.; Sharp, A.; Vagapov, Y. Comparative analysis and practical implementation of the ESP32 microcontroller module for the internet of things. In Proceedings of the 2017 Internet Technologies and Applications (ITA), Wrexham, UK, 12–15 September 2017; IEEE: New York, NY, USA, 2017; pp. 143–148. [Google Scholar]
- Hunkeler, U.; Truong, H.L.; Stanford-Clark, A. MQTT-S—A publish/subscribe protocol for Wireless Sensor Networks. In Proceedings of the 2008 3rd International Conference on Communication Systems Software and Middleware and Workshops (COMSWARE’08), Bangalore, India, 6–10 January 2008; IEEE: New York, NY, USA, 2008; pp. 791–798. [Google Scholar]
- Bray, T. (Ed.) RFC 8259: The JavaScript Object Notation (JSON) Data Interchange Format; ACM Digital Library: New York, NY, USA, 2017. [Google Scholar]
- Hori, N.; Newton, R.U.; Kawamori, N.; McGuigan, M.R.; Kraemer, W.J.; Nosaka, K. Reliability of performance measurements derived from ground reaction force data during countermovement jump and the influence of sampling frequency. J Strength Cond Res. 2009, 23, 874–882. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Qty. | Part | Description |
|---|---|---|---|
| 1 | 1 | Chair | Straight back, without armrest, seat 43 cm (17 in) |
| 2 | 1 | Board | 50 cm × 50 cm × 2 cm (20 in × 20 in × ¾ in) |
| 3 | 1 | ESP32-WROOM-32 | Module with USB Port |
| 4 | 1 | USB Battery Pack | Supply 5V power to ESP32 |
| 5 | 4 | Weight Scale Feet | Removed from bathroom scale, contains weight sensor |
| 6 | 4 | HX711 | Module with analog end and digital end |
| 7 | 4 | 50-kg weight sensor | For temperature compensation |
| Data Parameters |
| {“metadata”: {“user”: uid, “class”: cls, “T_trial”: Ttrl, “T_sample”: Tsmp, “N_dev”: 4}} |
| Data Set |
| {“data”: {“label”: “RB”, “data”: [data_0_1, …, data_0_n]}} |
| {“data”: {“label”: “RF”, “data”: [data_1_1, …, data_1_n]}} |
| {“data”: {“label”: “LF”, “data”: [data_2_1, …, data_2_n]}} |
| {“data”: {“label”: “LB”, “data”: [data_3_1, …, data_3_n]}} |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, A.W.; Lee, M.S.; Yeh, D.P.; Yeh, H.-J.J. Sensor-Integrated Chairs for Lower Body Strength and Endurance Assessment. Sensors 2024, 24, 788. https://doi.org/10.3390/s24030788
Lee AW, Lee MS, Yeh DP, Yeh H-JJ. Sensor-Integrated Chairs for Lower Body Strength and Endurance Assessment. Sensors. 2024; 24(3):788. https://doi.org/10.3390/s24030788
Chicago/Turabian StyleLee, Alexander W., Melissa S. Lee, Daniel P. Yeh, and Hsi-Jen J. Yeh. 2024. "Sensor-Integrated Chairs for Lower Body Strength and Endurance Assessment" Sensors 24, no. 3: 788. https://doi.org/10.3390/s24030788