
Sensors for Digital Transformation in Smart Forestry
 , , , ,
, , , ,  and
and 
Abstract
:
1. Introduction
2. Digital Transformation in Smart Forestry Needs Sensors
3. Sensor Deep Dive
3.1. Locator Devices
3.2. Climate and Weather Sensors
3.2.1. Temperature Sensors
3.2.2. Moisture and Humidity Sensors
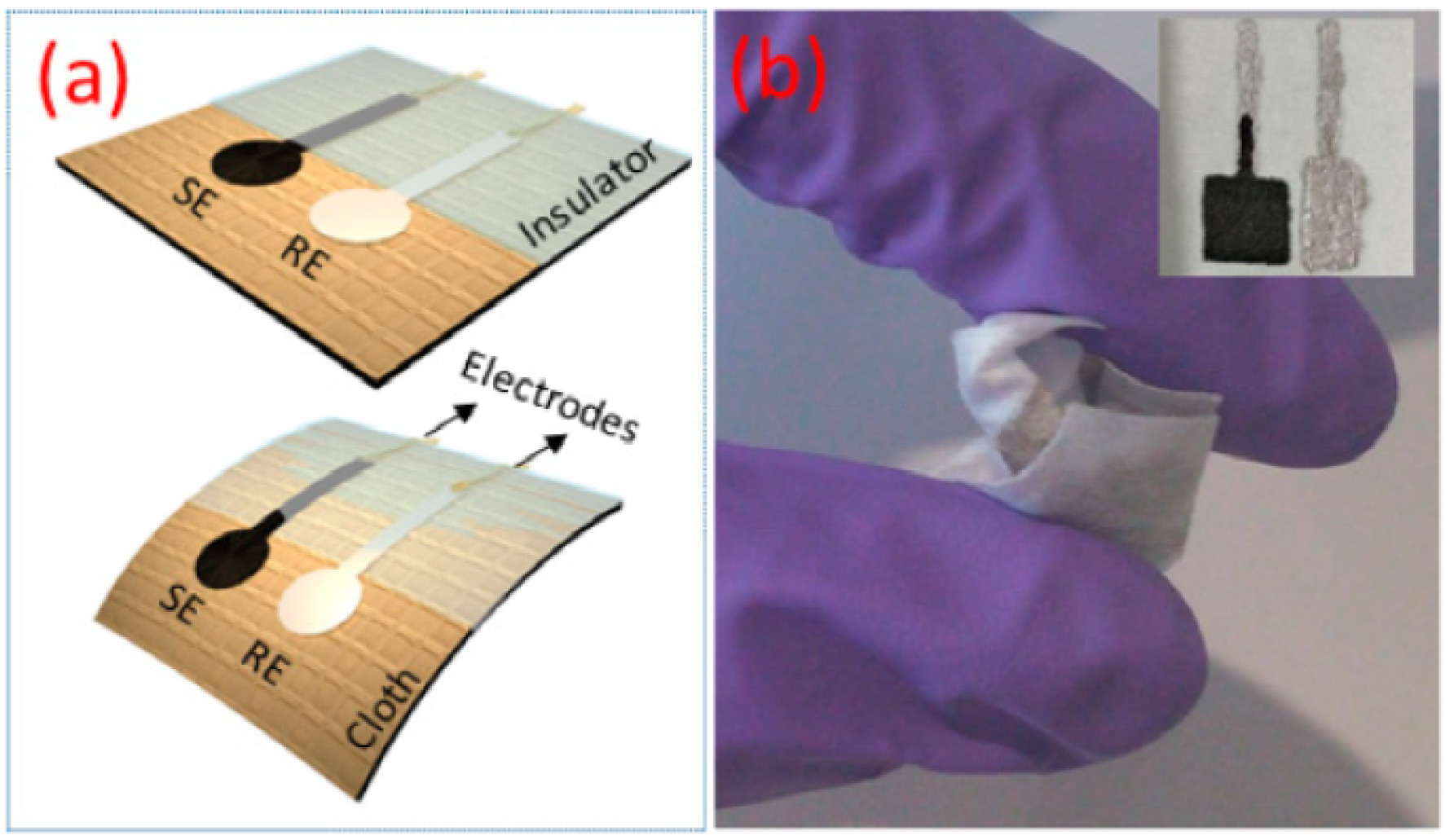
3.3. Soil pH Sensors
3.4. Imaging Technologies
3.4.1. RGB Camera
3.4.2. Thermal Imaging Camera
3.4.3. LiDAR
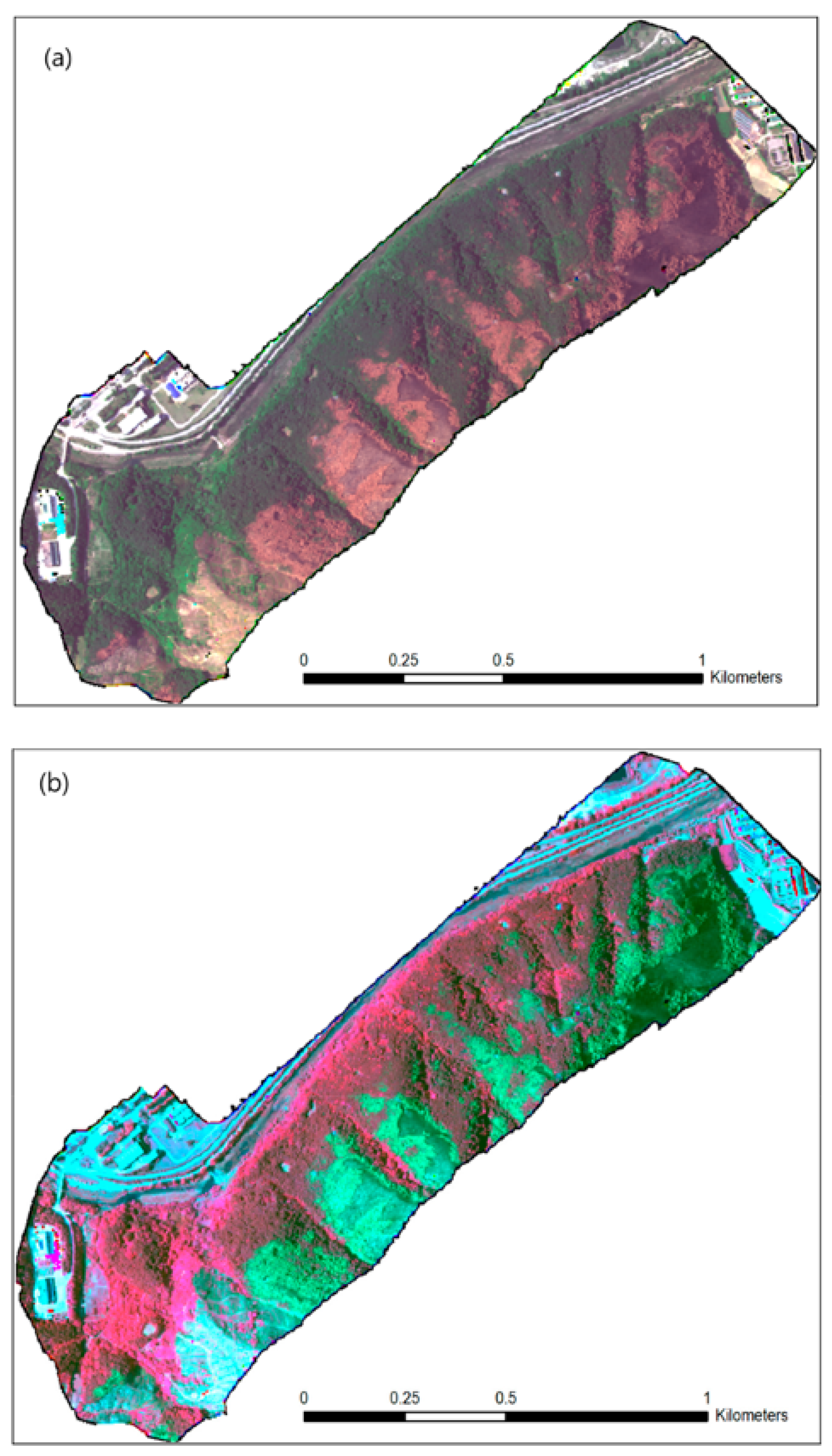
3.4.4. Spectrometers and Multispectral Cameras
3.5. Observation Platforms
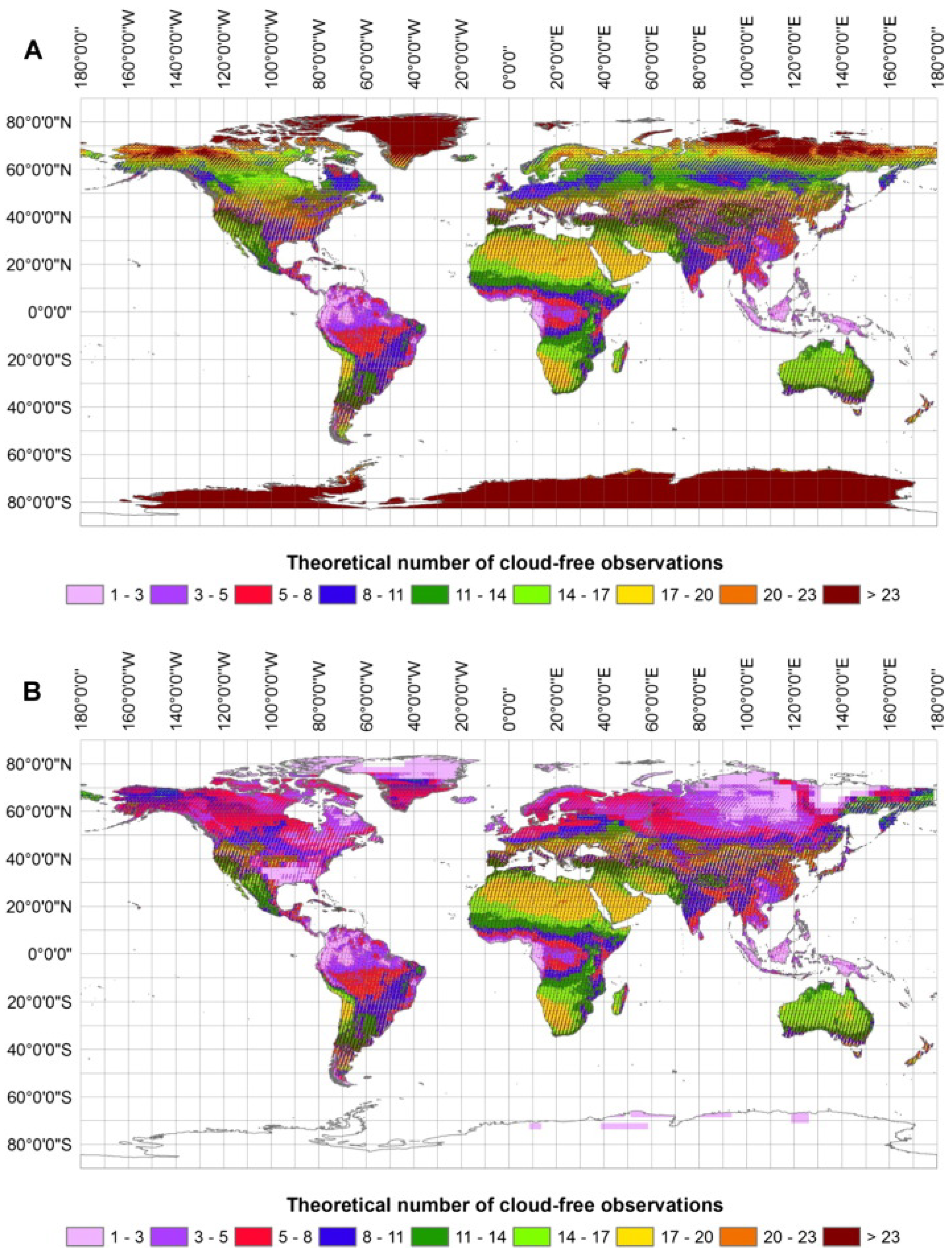
3.5.1. Satellites
3.5.2. Unmanned Aerial Vehicles (UAVs)—Drones
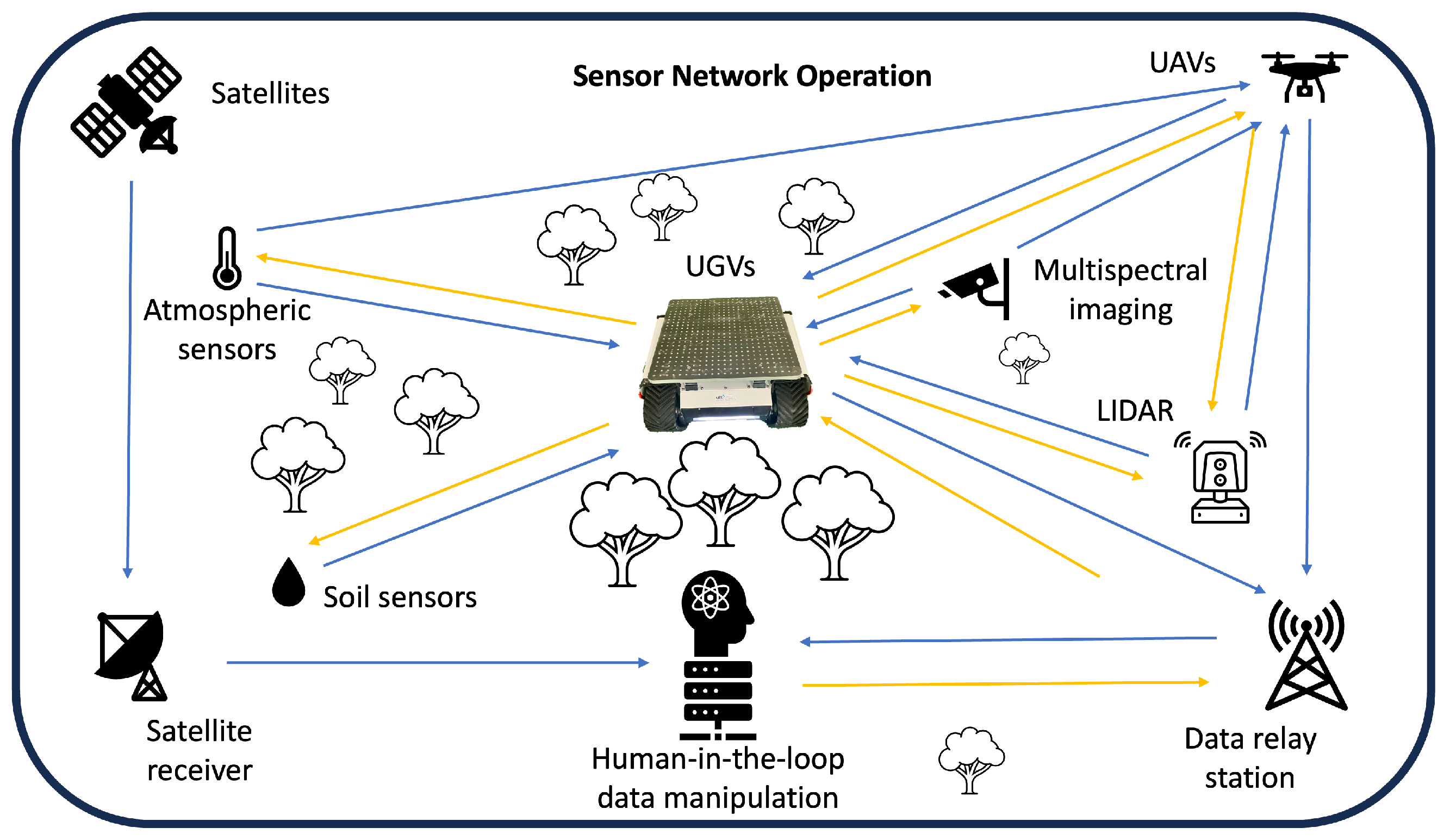
4. Sensor Network Operation
5. Robot Integration
Equipment Carrier
6. Improving Databases
- ForestPlots.net: A global network that brings together researchers and forest plots data to monitor the dynamics of tree communities in response to environmental change [103].
- Global Forest Watch (GFW): An interactive online forest monitoring and alert system designed to empower people everywhere to better manage forests. It uses satellite imagery and other technologies to provide data about forests worldwide [104].
- FLUXNET: A global network of micrometeorological tower sites that use eddy covariance methods to measure the exchanges of carbon dioxide, water vapor, and energy between the biosphere and atmosphere [105].
- OpenTopography: A portal that provides access to high-resolution, Earth science-oriented, topography data, and tools, including data from LiDAR surveys [106].
- Earth System Grid Federation (ESGF): A web-based tool hosting a multitude of datasets related to climate science, including outputs from various climate models and observational data [107].
- TerraClimate: A dataset of monthly climate and climatic water balance for global terrestrial surfaces, providing high-spatial resolution data.
- NEON (National Ecological Observatory Network): Provides open access ecological data, including sensor data, from across the United States [108].
- TerraClimate: A dataset of monthly climate and climatic water balance for global terrestrial surfaces, providing high-spatial resolution data [109].
7. Challenges and Future Work
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| AGB | Above Ground Biomass |
| AMR | Autonomous Mobile Robot |
| ESGF | Earth System Grid Federation |
| FLIR | Forward Looking InfraRed |
| GFW | Global Forest Watch |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| LiDAR | Light Detection and Ranging |
| MFC | Microbial Fuel Cell |
| ML | Machine Learning |
| NEON | National Ecological Observatory Network |
| PLS | Personal Laser Scanning |
| PV | Photovoltaic |
| RFID | Radio Frequency Identification |
| RGB | Red–Green–Blue |
| TDLAS | Tunable Diode Laser Absorption Spectroscopy |
| TLS | Terrestrial Laser Scanning |
| UAV | Unmanned Aerial Vehicle |
| UGV | Unmanned Ground Vehicle |
| VTOL | Vertical Takeoff and Landing |
References
- Bengio, Y.; Lecun, Y.; Hinton, G. Deep learning for AI. Commun. ACM 2021, 64, 58–65. [Google Scholar] [CrossRef]
- Holzinger, A.; Keiblinger, K.; Holub, P.; Zatloukal, K.; Müller, H. AI for Life: Trends in Artificial Intelligence for Biotechnology. New Biotechnol. 2023, 74, 16–24. [Google Scholar] [CrossRef]
- Holzinger, A.; Saranti, A.; Angerschmid, A.; Retzlaff, C.O.; Gronauer, A.; Pejakovic, V.; Medel, F.; Krexner, T.; Gollob, C.; Stampfer, K. Digital Transformation in Smart Farm and Forest Operations needs Human-Centered AI: Challenges and Future Directions. Sensors 2022, 22, 3043. [Google Scholar] [CrossRef]
- Silvestro, D.; Goria, S.; Sterner, T.; Antonelli, A. Improving biodiversity protection through artificial intelligence. Nat. Sustain. 2022, 5, 415–424. [Google Scholar] [CrossRef]
- Farmonov, N.; Amankulova, K.; Szatmári, J.; Sharifi, A.; Abbasi-Moghadam, D.; Nejad, S.M.M.; Mucsi, L. Crop type classification by DESIS hyperspectral imagery and machine learning algorithms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 1576–1588. [Google Scholar] [CrossRef]
- Forzieri, G.; Girardello, M.; Ceccherini, G.; Spinoni, J.; Feyen, L.; Hartmann, H.; Beck, P.S.; Camps-Valls, G.; Chirici, G.; Mauri, A. Emergent vulnerability to climate-driven disturbances in European forests. Nat. Commun. 2021, 12, 1081. [Google Scholar] [CrossRef]
- Rolnick, D.; Donti, P.L.; Kaack, L.H.; Kochanski, K.; Lacoste, A.; Sankaran, K.; Ross, A.S.; Milojevic-Dupont, N.; Jaques, N.; Waldman-Brown, A.; et al. Tackling climate change with machine learning. ACM Comput. Surv. (CSUR) 2023, 55, 42. [Google Scholar] [CrossRef]
- Ernst, E. The AI trilemma: Saving the planet without ruining our jobs. Front. Artif. Intell. 2022, 5, 886561. [Google Scholar] [CrossRef] [PubMed]
- Ceccherini, G.; Duveiller, G.; Grassi, G.; Lemoine, G.; Avitabile, V.; Pilli, R.; Cescatti, A. Abrupt increase in harvested forest area over Europe after 2015. Nature 2020, 583, 72–77. [Google Scholar] [CrossRef] [PubMed]
- Balcan, M.F.; DeBlasio, D.; Dick, T.; Kingsford, C.; Sandholm, T.; Vitercik, E. How much data is sufficient to learn high-performing algorithms? Generalization guarantees for data-driven algorithm design. In Proceedings of the 53rd Annual ACM SIGACT Symposium on Theory of Computing, Virtual, 21–25 June 2021; pp. 919–932. [Google Scholar] [CrossRef]
- Tolle, K.M.; Tansley, S.W.; Hey, A.J.G. The fourth paradigm: Data-intensive scientific discovery. Proc. IEEE 2011, 99, 1334–1337. [Google Scholar] [CrossRef]
- Vial, G. Understanding digital transformation: A review and a research agenda. Manag. Digit. Transform. 2019, 28, 118–144. [Google Scholar] [CrossRef]
- Verhoef, P.C.; Broekhuizen, T.; Bart, Y.; Bhattacharya, A.; Dong, J.Q.; Fabian, N.; Haenlein, M. Digital transformation: A multidisciplinary reflection and research agenda. J. Bus. Res. 2021, 122, 889–901. [Google Scholar] [CrossRef]
- Matt, C.; Hess, T.; Benlian, A. Digital Transformation Strategies. Bus. Inf. Syst. Eng. 2015, 57, 339–343. [Google Scholar] [CrossRef]
- Schallmo, D.R.A.; Williams, C.A. History of Digital Transformation. In Digital Transformation Now!: Guiding the Successful Digitalization of Your Business Model; Springer International Publishing: Cham, Switzerland, 2018; pp. 3–8. [Google Scholar] [CrossRef]
- Del Ser, J.; Barredo-Arrieta, A.; Díaz-Rodríguez, N.; Herrera, F.; Saranti, A.; Holzinger, A. On Generating Trustworthy Counterfactual Explanations. Inf. Sci. 2024, 655, 119898. [Google Scholar] [CrossRef]
- Gollob, C.; Krassnitzer, R.; Ritter, T.; Tockner, A.; Erber, G.; Kühmaier, M.; Hönigsberger, F.; Varch, T.; Holzinger, A.; Stampfer, K. Measurement of Individual Tree Parameters with Carriage-Based Laser Scanning in Cable Yarding Operations. Croat. J. For. Eng. (CROJFE) 2023, 44, 401–417. [Google Scholar] [CrossRef]
- Ward, S.; Hensler, J.; Alsalam, B.; Gonzalez, L.F. Autonomous UAVs wildlife detection using thermal imaging, predictive navigation and computer vision. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Grajewski, S.M. Prediction of Primary Deformation Modulus Based on Bearing Capacity: A Case on Forest Road with a Light Falling Weight Deflectometer Zorn ZFG 3000 GPS. Forests 2022, 13, 1874. [Google Scholar] [CrossRef]
- Hoffmann, S.; Schönauer, M.; Heppelmann, J.; Asikainen, A.; Cacot, E.; Eberhard, B.; Hasenauer, H.; Ivanovs, J.; Jaeger, D.; Lazdins, A.; et al. Trafficability prediction using depth-to-water maps: The status of application in northern and central European forestry. Curr. For. Rep. 2022, 8, 55–71. [Google Scholar] [CrossRef]
- Fraefel, M.; Bont, L.G.; Fischer, C. Spatially explicit assessment of forest road suitability for timber extraction and hauling in Switzerland. Eur. J. For. Res. 2021, 140, 1195–1209. [Google Scholar] [CrossRef]
- Retzlaff, C.O.; Das, S.; Wayllace, C.; Mousavi, P.; Afshari, M.; Yang, T.; Saranti, A.; Angerschmid, A.; Taylor, M.E.; Holzinger, A. Human-in-the-Loop Reinforcement Learning: A Survey and Position on Requirements, Challenges, and Opportunities. J. Artif. Intell. Res. (JAIR) 2024, 79. in print. [Google Scholar]
- Parkinson, B.W.; Gilbert, S.W. NAVSTAR: Global positioning system—Ten years later. Proc. IEEE 1983, 71, 1177–1186. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer Science and Business Media: Wien, Austria; New York, NY, USA, 2007. [Google Scholar]
- Wing, M.G.; Eklund, A.; Kellogg, L.D. Consumer-grade global positioning system (GPS) accuracy and reliability. J. For. 2005, 103, 169–173. [Google Scholar] [CrossRef]
- Tomaštík, J.; Everett, T. Static Positioning under Tree Canopy Using Low-Cost GNSS Receivers and Adapted RTKLIB Software. Sensors 2023, 23, 3136. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Nevalainen, P.; Peña Queralta, J.; Heikkonen, J.; Westerlund, T. Localization in Unstructured Environments: Towards Autonomous Robots in Forests with Delaunay Triangulation. Remote Sens. 2020, 12, 1870. [Google Scholar] [CrossRef]
- Danskin, S.D.; Bettinger, P.; Jordan, T.R.; Cieszewski, C. A comparison of GPS performance in a southern hardwood forest: Exploring low-cost solutions for forestry applications. South. J. Appl. For. 2009, 33, 9–16. [Google Scholar] [CrossRef]
- Hamza, V.; Stopar, B.; Sterle, O. Testing the Performance of Multi-Frequency Low-Cost GNSS Receivers and Antennas. Sensors 2021, 21, 2029. [Google Scholar] [CrossRef]
- Hamza, V.; Stopar, B.; Ambrožič, T.; Turk, G.; Sterle, O. Testing Multi-Frequency Low-Cost GNSS Receivers for Geodetic Monitoring Purposes. Sensors 2020, 20, 4375. [Google Scholar] [CrossRef]
- Bjoerk, A.; Erlandsson, M.; Haekli, J.; Jaakkola, K.; Nilsson, A.; Nummila, K.; Puntanen, V.; Sirkka, A. Monitoring environmental performance of the forestry supply chain using RFID. Comput. Ind. 2011, 62, 830–841. [Google Scholar] [CrossRef]
- Dai, J.; Wang, M.; Wu, B.; Shen, J.; Wang, X. A Survey of Latest Wi-Fi Assisted Indoor Positioning on Different Principles. Sensors 2023, 23, 7961. [Google Scholar] [CrossRef]
- Jiménez-Buendía, M.; Soto-Valles, F.; Blaya-Ros, P.J.; Toledo-Moreo, A.; Domingo-Miguel, R.; Torres-Sánchez, R. High-density wi-fi based sensor network for efficient irrigation management in precision agriculture. Appl. Sci. 2021, 11, 1628. [Google Scholar] [CrossRef]
- Kim, G.H.; Kim, K.D.; Lee, H.S.; Choi, Y.S.; Mun, H.S.; Oh, J.H.; Shin, B.S. Development of wi-fi-based teleoperation system for forest harvester. J. Biosyst. Eng. 2021, 46, 206–216. [Google Scholar] [CrossRef]
- Keefe, R.F.; Wempe, A.M.; Becker, R.M.; Zimbelman, E.G.; Nagler, E.S.; Gilbert, S.L.; Caudill, C.C. Positioning methods and the use of location and activity data in forests. Forests 2019, 10, 458. [Google Scholar] [CrossRef] [PubMed]
- Khaled, F.; Ondel, O.; Allard, B. Microbial fuel cells as power supply of a low-power temperature sensor. J. Power Sources 2016, 306, 354–360. [Google Scholar] [CrossRef]
- Zellweger, F.; Coomes, D.; Lenoir, J.; Depauw, L.; Maes, S.L.; Wulf, M.; Kirby, K.J.; Brunet, J.; Kopecký, M.; Máliš, F.; et al. Seasonal drivers of understorey temperature buffering in temperate deciduous forests across Europe. Glob. Ecol. Biogeogr. 2019, 28, 1774–1786. [Google Scholar] [CrossRef] [PubMed]
- De Frenne, P.; Zellweger, F.; Rodríguez-Sánchez, F.; Scheffers, B.R.; Hylander, K.; Luoto, M.; Vellend, M.; Verheyen, K.; Lenoir, J. Global buffering of temperatures under forest canopies. Nat. Ecol. Evol. 2019, 3, 744–749. [Google Scholar] [CrossRef] [PubMed]
- Reintam, E.; Vennik, K.; Kukk, L.; Kade, S.; Krebstein, K.; Are, M.; Astover, A. Measuring and predicting soil moisture conditions for trafficability. Acta Agric. Scand. Sect. B—Soil Plant Sci. 2016, 66, 698–705. [Google Scholar] [CrossRef]
- Oksanen, E.; Lihavainen, J.; Keinänen, M.; Keski-Saari, S.; Kontunen-Soppela, S.; Sellin, A.; Sõber, A. Northern Forest Trees Under Increasing Atmospheric Humidity. In Progress in Botany Vol. 80; Springer International Publishing: Cham, Switzerland, 2019; pp. 317–336. [Google Scholar] [CrossRef]
- Hardie, M. Review of Novel and Emerging Proximal Soil Moisture Sensors for Use in Agriculture. Sensors 2020, 20, 6934. [Google Scholar] [CrossRef] [PubMed]
- González-Teruel, J.D.; Torres-Sánchez, R.; Blaya-Ros, P.J.; Toledo-Moreo, A.B.; Jiménez-Buendía, M.; Soto-Valles, F. Design and Calibration of a Low-Cost SDI-12 Soil Moisture Sensor. Sensors 2019, 19, 491. [Google Scholar] [CrossRef] [PubMed]
- Lekshmi, S.; Singh, D.N.; Baghini, M.S. A critical review of soil moisture measurement. Measurement 2014, 54, 92–105. [Google Scholar] [CrossRef]
- Scheberl, L.; Scharenbroch, B.C.; Werner, L.P.; Prater, J.R.; Fite, K.L. Evaluation of soil pH and soil moisture with different field sensors: Case study urban soil. Urban For. Urban Green. 2019, 38, 267–279. [Google Scholar] [CrossRef]
- Bang-Andreasen, T.; Peltre, M.; Ellegaard-Jensen, L.; Hansen, L.H.; Ingerslev, M.; Rønn, R.; Jacobsen, C.S.; Kjøller, R. Application of wood ash leads to strong vertical gradients in soil pH changing prokaryotic community structure in forest top soil. Sci. Rep. 2021, 11, 742. [Google Scholar] [CrossRef]
- Hong, S.; Gan, P.; Chen, A. Environmental controls on soil pH in planted forest and its response to nitrogen deposition. Environ. Res. 2019, 172, 159–165. [Google Scholar] [CrossRef]
- Penn, C.J.; Camberato, J.J. A Critical Review on Soil Chemical Processes that Control How Soil pH Affects Phosphorus Availability to Plants. Agriculture 2019, 9, 120. [Google Scholar] [CrossRef]
- Manjakkal, L.; Dervin, S.; Dahiya, R. Flexible potentiometric pH sensors for wearable systems. RSC Adv. 2020, 10, 8594–8617. [Google Scholar] [CrossRef] [PubMed]
- Manjakkal, L.; Dang, W.; Yogeswaran, N.; Dahiya, R. Textile-Based Potentiometric Electrochemical pH Sensor for Wearable Applications. Biosensors 2019, 9, 14. [Google Scholar] [CrossRef] [PubMed]
- Zwerts, J.A.; Stephenson, P.; Maisels, F.; Rowcliffe, M.; Astaras, C.; Jansen, P.A.; van Der Waarde, J.; Sterck, L.E.; Verweij, P.A.; Bruce, T.; et al. Methods for wildlife monitoring in tropical forests: Comparing human observations, camera traps, and passive acoustic sensors. Conserv. Sci. Pract. 2021, 3, e568. [Google Scholar] [CrossRef]
- González-Jaramillo, V.; Fries, A.; Bendix, J. AGB Estimation in a Tropical Mountain Forest (TMF) by Means of RGB and Multispectral Images Using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2019, 11, 1413. [Google Scholar] [CrossRef]
- Li, L.; Chen, J.; Mu, X.; Li, W.; Yan, G.; Xie, D.; Zhang, W. Quantifying Understory and Overstory Vegetation Cover Using UAV-Based RGB Imagery in Forest Plantation. Remote Sens. 2020, 12, 298. [Google Scholar] [CrossRef]
- Zhu, K.; Chen, W.; Zhang, W.; Song, R.; Li, Y. Autonomous Robot Navigation Based on Multi-Camera Perception. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5879–5885. [Google Scholar] [CrossRef]
- Zhang, H.; Jin, L.; Ye, C. An RGB-D Camera Based Visual Positioning System for Assistive Navigation by a Robotic Navigation Aid. IEEE/CAA J. Autom. Sin. 2021, 8, 1389–1400. [Google Scholar] [CrossRef]
- Ceccarelli, A.; Secci, F. RGB Cameras Failures and Their Effects in Autonomous Driving Applications. IEEE Trans. Dependable Secur. Comput. 2023, 20, 2731–2745. [Google Scholar] [CrossRef]
- Hamberg, L.J.; Fisher, J.B.; Ruppert, J.L.; Tureček, J.; Rosen, D.H.; James, P.M. Assessing and modeling diurnal temperature buffering and evapotranspiration dynamics in forest restoration using ECOSTRESS thermal imaging. Remote Sens. Environ. 2022, 280, 113178. [Google Scholar] [CrossRef]
- Sadi, M.; Zhang, Y.; Xie, W.F.; Hossain, F.M.A. Forest Fire Detection and Localization Using Thermal and Visual Cameras. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 744–749. [Google Scholar] [CrossRef]
- Santini, F.; Kefauver, S.C.; Resco de Dios, V.; Araus, J.L.; Voltas, J. Using unmanned aerial vehicle-based multispectral, RGB and thermal imagery for phenotyping of forest genetic trials: A case study in Pinus halepensis. Ann. Appl. Biol. 2019, 174, 262–276. [Google Scholar] [CrossRef]
- da Silva, D.Q.; dos Santos, F.N.; Sousa, A.J.; Filipe, V. Visible and Thermal Image-Based Trunk Detection with Deep Learning for Forestry Mobile Robotics. J. Imaging 2021, 7, 176. [Google Scholar] [CrossRef] [PubMed]
- Xue, F.; Lu, W.; Chen, Z.; Webster, C.J. From LiDAR point cloud towards digital twin city: Clustering city objects based on Gestalt principles. J. Photogramm. Remote Sens. 2020, 167, 418–431. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Nothdurft, A. Forest Inventory with Long Range and High-Speed Personal Laser Scanning (PLS) and Simultaneous Localization and Mapping (SLAM) Technology. Remote Sens. 2020, 12, 1509. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Nothdurft, A. Measurement of Forest Inventory Parameters with Apple iPad Pro and Integrated LiDAR Technology. Remote Sens. 2021, 13, 3129. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Nothdurft, A. Comparison of 3D Point Clouds Obtained by Terrestrial Laser Scanning and Personal Laser Scanning on Forest Inventory Sample Plots. Data 2020, 5, 103. [Google Scholar] [CrossRef]
- LaRue, E.A.; Wagner, F.W.; Fei, S.; Atkins, J.W.; Fahey, R.T.; Gough, C.M.; Hardiman, B.S. Compatibility of Aerial and Terrestrial LiDAR for Quantifying Forest Structural Diversity. Remote Sens. 2020, 12, 1407. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, C.; Wu, H.; Wei, Y.; Ren, M.; Zhao, C. Improved LiDAR Localization Method for Mobile Robots Based on Multi-Sensing. Remote Sens. 2022, 14, 6133. [Google Scholar] [CrossRef]
- Vargas, J.; Alsweiss, S.; Toker, O.; Razdan, R.; Santos, J. An Overview of Autonomous Vehicles Sensors and Their Vulnerability to Weather Conditions. Sensors 2021, 21, 5397. [Google Scholar] [CrossRef]
- Abdollahnejad, A.; Panagiotidis, D. Tree Species Classification and Health Status Assessment for a Mixed Broadleaf-Conifer Forest with UAS Multispectral Imaging. Remote Sens. 2020, 12, 3722. [Google Scholar] [CrossRef]
- Paz-Kagan, T.; Silver, M.; Panov, N.; Karnieli, A. Multispectral Approach for Identifying Invasive Plant Species Based on Flowering Phenology Characteristics. Remote Sens. 2019, 11, 953. [Google Scholar] [CrossRef]
- de Oca, A.M.; Arreola, L.; Flores, A.; Sanchez, J.; Flores, G. Low-cost multispectral imaging system for crop monitoring. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 443–451. [Google Scholar] [CrossRef]
- Neumann, P.P.; Kohlhoff, H.; Huellmann, D.; Lilienthal, A.J.; Kluge, M. Bringing Mobile Robot Olfaction to the next dimension—UAV-based remote sensing of gas clouds and source localization. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3910–3916. [Google Scholar] [CrossRef]
- Shin, J.-i.; Seo, W.-w.; Kim, T.; Park, J.; Woo, C.-s. Using UAV Multispectral Images for Classification of Forest Burn Severity—A Case Study of the 2019 Gangneung Forest Fire. Forests 2019, 10, 1025. [Google Scholar] [CrossRef]
- Heath, G.R. ERTS data tested for forestry applications. Photogramm. Eng. 1974, 40, 1087–1092. [Google Scholar]
- Beaubien, J. Forest Type Mapping from LANDSAT digital data. Photogramm. Eng. Remote Sens. 1979, 45, 1135–1144. [Google Scholar]
- Housman, I.W.; Chastain, R.A.; Finco, M.V. An Evaluation of Forest Health Insect and Disease Survey Data and Satellite-Based Remote Sensing Forest Change Detection Methods: Case Studies in the United States. Remote Sens. 2018, 10, 1184. [Google Scholar] [CrossRef]
- Abbas, S.; Wong, M.S.; Wu, J.; Shahzad, N.; Muhammad Irteza, S. Approaches of Satellite Remote Sensing for the Assessment of Above-Ground Biomass across Tropical Forests: Pan-tropical to National Scales. Remote Sens. 2020, 12, 3351. [Google Scholar] [CrossRef]
- Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Achim, A.; Mulverhill, C. Framework for near real-time forest inventory using multi source remote sensing data. Forestry 2023, 96, 1–19. [Google Scholar] [CrossRef]
- Pratihast, A.K.; DeVries, B.; Avitabile, V.; De Bruin, S.; Kooistra, L.; Tekle, M.; Herold, M. Combining Satellite Data and Community-Based Observations for Forest Monitoring. Forests 2014, 5, 2464–2489. [Google Scholar] [CrossRef]
- Wulder, M.A.; Hilker, T.; White, J.C.; Coops, N.C.; Masek, J.G.; Pflugmacher, D.; Crevier, Y. Virtual constellations for global terrestrial monitoring. Remote Sens. Environ. 2015, 170, 62–76. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; White, J.C.; Wulder, M.A.; Næsset, E. Remote sensing in forestry: Current challenges, considerations and directions. For. Int. J. For. Res. 2023, 97, 11–37. [Google Scholar] [CrossRef]
- Holmgren, P.; Thuresson, T. Satellite remote sensing for forestry planning—A review. Scand. J. For. Res. 1998, 13, 90–110. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Goward, S.N.; Masek, J.G.; Irons, J.R.; Herold, M.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Landsat continuity: Issues and opportunities for land cover monitoring. Remote Sens. Environ. 2008, 112, 955–969. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry Remote Sensing from Unmanned Aerial Vehicles: A Review Focusing on the Data, Processing and Potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef]
- Frey, R.A.; Ackerman, S.A.; Liu, Y.; Strabala, K.I.; Zhang, H.; Key, J.R.; Wang, X. Cloud detection with MODIS. Part I: Improvements in the MODIS cloud mask for collection 5. J. Atmos. Ocean. Technol. 2008, 25, 1057–1072. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Strabala, K.I.; Menzel, W.P.; Frey, R.A.; Moeller, C.C.; Gumley, L.E. Discriminating clear sky from clouds with MODIS. J. Geophys. Res. Atmos. 1998, 103, 32141–32157. [Google Scholar] [CrossRef]
- Young, D.J.N.; Koontz, M.J.; Weeks, J. Optimizing aerial imagery collection and processing parameters for drone-based individual tree mapping in structurally complex conifer forests. Methods Ecol. Evol. 2022, 13, 1447–1463. [Google Scholar] [CrossRef]
- Inoue, Y. Satellite- and drone-based remote sensing of crops and soils for smart farming—A review. Soil Sci. Plant Nutr. 2020, 66, 798–810. [Google Scholar] [CrossRef]
- Naughton, J.; McDonald, W. Evaluating the Variability of Urban Land Surface Temperatures Using Drone Observations. Remote Sens. 2019, 11, 1722. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Buchelt, A.; Adrowitzer, A.; Kieseberg, P.; Gollob, C.; Nothdurft, A.; Eresheim, S.; Tschiatschek, S.; Stampfer, K.; Holzinger, A. Exploring artificial intelligence for applications of drones in forest ecology and management. For. Ecol. Manag. 2024, 551, 121530. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, L. A Review on Unmanned Aerial Vehicle Remote Sensing: Platforms, Sensors, Data Processing Methods, and Applications. Drones 2023, 7, 398. [Google Scholar] [CrossRef]
- Pereira, T.; Gameiro, T.; Viegas, C.; Santos, V.; Ferreira, N. Sensor Integration in a Forestry Machine. Sensors 2023, 23, 9853. [Google Scholar] [CrossRef]
- Lewis, F.L. Wireless sensor networks. In Smart Environments: Technologies, Protocols, and Applications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2004; pp. 11–46. [Google Scholar]
- Zhao, M.; Ye, R.J.; Chen, S.T.; Chen, Y.C.; Chen, Z.Y. Realization of Forest Internet of Things Using Wireless Network Communication Technology of Low-Power Wide-Area Network. Sensors 2023, 23, 4809. [Google Scholar] [CrossRef]
- Ryu, S.; Won, J.; Chae, H.; Kim, H.S.; Seo, T. Evaluation Criterion of Wheeled Mobile Robotic Platforms on Grounds: A Survey. Int. J. Precis. Eng. Manuf. 2023, 1–12. [Google Scholar] [CrossRef]
- Ferreira, J.F.; Portugal, D.; Andrada, M.E.; Machado, P.; Rocha, R.P.; Peixoto, P. Sensing and Artificial Perception for Robots in Precision Forestry: A Survey. Robotics 2023, 12, 139. [Google Scholar] [CrossRef]
- Asadi, K.; Kalkunte Suresh, A.; Ender, A.; Gotad, S.; Maniyar, S.; Anand, S.; Noghabaei, M.; Han, K.; Lobaton, E.; Wu, T. An integrated UGV-UAV system for construction site data collection. Autom. Constr. 2020, 112, 103068. [Google Scholar] [CrossRef]
- Garattoni, L.; Birattari, M. collective Behaviour: Autonomous task sequencing in a robot swarm. Sci. Robot. 2018, 3, eaat0430. [Google Scholar] [CrossRef]
- Boehm, M.; Wermser, D. Sensor Networks for Forestry Applications operating with Limited Power Supply using LPWAN COTS Equipment. In Proceedings of the Mobile Communication—Technologies and Applications, 27th ITG-Symposium, Osnabrueck, Germany, 10–11 May 2023; pp. 85–90. [Google Scholar]
- Thakker, R.; Alatur, N.; Fan, D.D.; Tordesillas, J.; Paton, M.; Otsu, K.; Toupet, O.; Agha-mohammadi, A.-a. Autonomous off-road navigation over extreme terrains with perceptually-challenging conditions. In Proceedings of the Experimental Robotics: The 17th International Symposium, La Valletta, Malta, 9–12 November 2020; Springer: Cham, Switzerland, 2021; pp. 161–173. [Google Scholar]
- Aubin, C.A.; Gorissen, B.; Milana, E.; Buskohl, P.R.; Lazarus, N.; Slipher, G.A.; Keplinger, C.; Bongard, J.; Iida, F.; Lewis, J.A.; et al. Towards enduring autonomous robots via embodied energy. Nature 2022, 602, 393–402. [Google Scholar] [CrossRef] [PubMed]
- Bhargava, A.; Kumar, A. Arduino controlled robotic arm. In Proceedings of the 2017 International Conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017; Volume 2, pp. 376–380. [Google Scholar] [CrossRef]
- Welch, R.; Limonadi, D.; Manning, R. Systems engineering the Curiosity Rover: A retrospective. In Proceedings of the 2013 8th International Conference on System of Systems Engineering, Maui, HI, USA, 2–6 June 2013; pp. 70–75. [Google Scholar] [CrossRef]
- Lopez-Gonzalez, G.; Lewis, S.L.; Burkitt, M.; Phillips, O.L. ForestPlots. net: A web application and research tool to manage and analyse tropical forest plot data. J. Veg. Sci. 2011, 22, 610–613. [Google Scholar] [CrossRef]
- Galiatsatos, N.; Donoghue, D.N.; Watt, P.; Bholanath, P.; Pickering, J.; Hansen, M.C.; Mahmood, A.R. An assessment of global forest change datasets for national forest monitoring and reporting. Remote Sens. 2020, 12, 1790. [Google Scholar] [CrossRef]
- Pastorello, G.; Trotta, C.; Canfora, E.; Chu, H.; Christianson, D.; Cheah, Y.W.; Poindexter, C.; Chen, J.; Elbashandy, A.; Humphrey, M. The FLUXNET2015 dataset and the ONEFlux processing pipeline for eddy covariance data. Sci. Data 2020, 7, 225. [Google Scholar] [CrossRef] [PubMed]
- Krishnan, S.; Crosby, C.; Nandigam, V.; Phan, M.; Cowart, C.; Baru, C.; Arrowsmith, R. OpenTopography: A services oriented architecture for community access to LIDAR topography. In Proceedings of the 2nd International Conference on Computing for Geospatial Research and Applications (COM.Geo 11), Washington, DC, USA, 23–25 May 2011; Liao, L., Ed.; Association of Computing Machinery: New York, NY, USA, 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Cinquini, L.; Crichton, D.; Mattmann, C.; Harney, J.; Shipman, G.; Wang, F.; Ananthakrishnan, R.; Miller, N.; Denvil, S.; Morgan, M. The Earth System Grid Federation: An open infrastructure for access to distributed geospatial data. Future Gener. Comput. Syst. 2014, 36, 400–417. [Google Scholar] [CrossRef]
- Scholl, V.M.; Cattau, M.E.; Joseph, M.B.; Balch, J.K. Integrating National Ecological Observatory Network (NEON) airborne remote sensing and in-situ data for optimal tree species classification. Remote Sens. 2020, 12, 1414. [Google Scholar] [CrossRef]
- Abatzoglou, J.T.; Dobrowski, S.Z.; Parks, S.A.; Hegewisch, K.C. TerraClimate, a high-resolution global dataset of monthly climate and climatic water balance from 1958–2015. Sci. Data 2018, 5, 170191. [Google Scholar] [CrossRef] [PubMed]
- Holzinger, A.; Weippl, E.; Tjoa, A.M.; Kieseberg, P. Digital Transformation for Sustainable Development Goals (SDGs)—A Security, Safety and Privacy Perspective on AI. In Machine Learning and Knowledge Extraction; Springer Lecture Notes in Computer Science (LNCS); Springer: Cham, Switzerland, 2021; Volume 12844, pp. 1–20. [Google Scholar] [CrossRef]
- Kieseberg, P.; Weippl, E.; Tjoa, A.M.; Cabitza, F.; Campagner, A.; Holzinger, A. Controllable AI—An Alternative to Trustworthiness in Complex AI Systems? In Machine Learning and Knowledge Extraction; Lecture Notes in Computer Science (LNCS); Springer: Cham, Switzerland, 2023; Volume 14065, pp. 1–12. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Application | Advantages | Disadvantage |
|---|---|---|---|
| GNSS and Wifi, etc. | Localization | Accurate position determination | Problems in covered terrain due to signal inconsistency |
| Temperature sensors | Temperature monitoring | Provide insight into temperature fluctuations and can be linked to multiple other inputs (e.g., moisture), available to measure temperature in different media | Without linkage to other data, has a very narrow application in forestry. Continuous monitoring requires a good network |
| Moisture and humidity sensors | Measuring water content in air or soil | Produces climate data and can be easily linked to inputs like temperature. Applications can range from humidity measurements under the canopy to determining the trafficability of forest roads. | Real-time monitoring is only possible with a good network. Setup can be complicated. |
| Soil pH | Determining the solubility of different nutrients in soil | Understanding the nutrient uptake capability in relation to the soil. | On-site measurements with embedded sensors cannot reach the accuracy as an in-lab measurement |
| RGB camera | Generates images of the surroundings | Wildlife monitoring, understanding forest road condition, and navigational aid | Processing of pure image data can be challenging. Large amounts of data are generated when high-quality video/photo is used |
| Thermal imaging camera | Measures heat profiles of the surroundings | Understanding of thermal gradients; useful in phenotyping; forest fire detection SAR | Large amount of data generation possible, and image processing can be challenging. |
| LIDAR sensor | Provides detailed topographical data | Assists in biomass estimation, forest structure analysis, and navigation | Most commonly used technologies today are expensive. Problem with rain or other contamination on the transparent window. |
| Multispectral cameras | Measuring multiple spectra at the same time for simple data linking | Simple setup to obtain a broad range of data that is directly linked to one another | The collection of multiple wavelengths at the same time can lead to poor performance of each detector compared to specialized ones |
| Device | Application | Advantages | Disadvantage |
|---|---|---|---|
| Satellites | Remotely detect various data inputs (Temperature, moisture, images, etc.) | Ease of access to data, standardized datasets, and ability to monitor almost the entire surface of the earth | In many cases dependent on weather conditions. Continuous monitoring of a certain area is hardly possible. Large distance to the area of interest. |
| Drones | Remotely detecting various data inputs. | Cheap and easy to operate by a human; operation below the tree canopy is possible | Limited operation time for non-fixed wing variants; challenging to autonomize for flight below the canopy |
| Unmanned ground vehicles | Autonomous data collection and interaction with ground-based equipment. The potential communication link with other equipment like drones | Longer operation time compared to drones, with a high payload and is simple to use | Without external computing sources, fully autonomous maneuvering is still not possible |
| Existing forest machinery | Data collection | Simple sensors that do not require a lot of human interaction can gather data without interfering with the human workflow. | Complex sensors pose issues due to harsh operating conditions, e.g., LIDAR on a harvester. Therefore, they are limited to simpler sensors |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ehrlich-Sommer, F.; Hoenigsberger, F.; Gollob, C.; Nothdurft, A.; Stampfer, K.; Holzinger, A. Sensors for Digital Transformation in Smart Forestry. Sensors 2024, 24, 798. https://doi.org/10.3390/s24030798
Ehrlich-Sommer F, Hoenigsberger F, Gollob C, Nothdurft A, Stampfer K, Holzinger A. Sensors for Digital Transformation in Smart Forestry. Sensors. 2024; 24(3):798. https://doi.org/10.3390/s24030798
Chicago/Turabian StyleEhrlich-Sommer, Florian, Ferdinand Hoenigsberger, Christoph Gollob, Arne Nothdurft, Karl Stampfer, and Andreas Holzinger. 2024. "Sensors for Digital Transformation in Smart Forestry" Sensors 24, no. 3: 798. https://doi.org/10.3390/s24030798