
Research on the Sensing Characteristics of an Integrated Grid-like Sensor Based on a Triboelectric Nanogenerator


Abstract
:1. Introduction
2. Principle
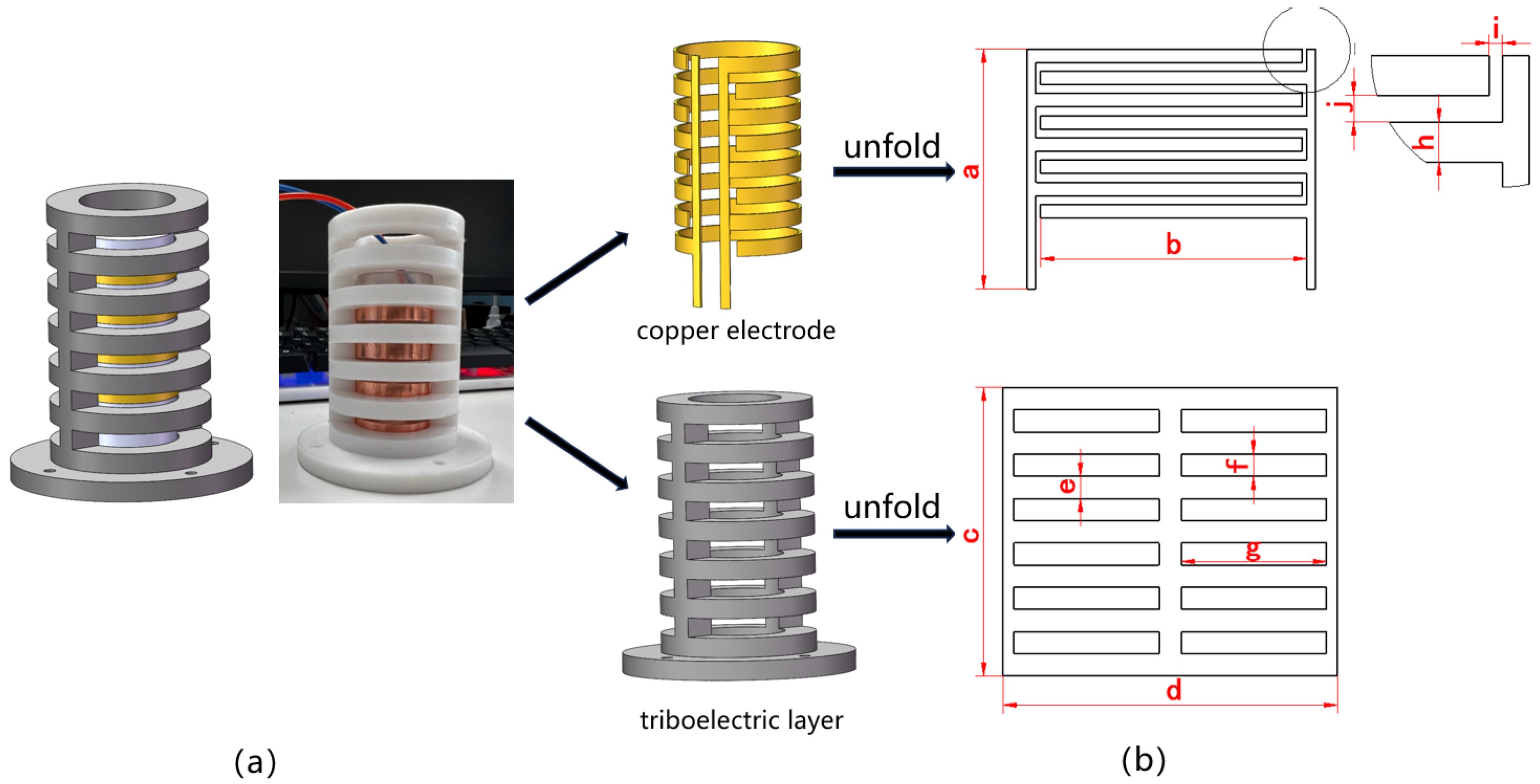
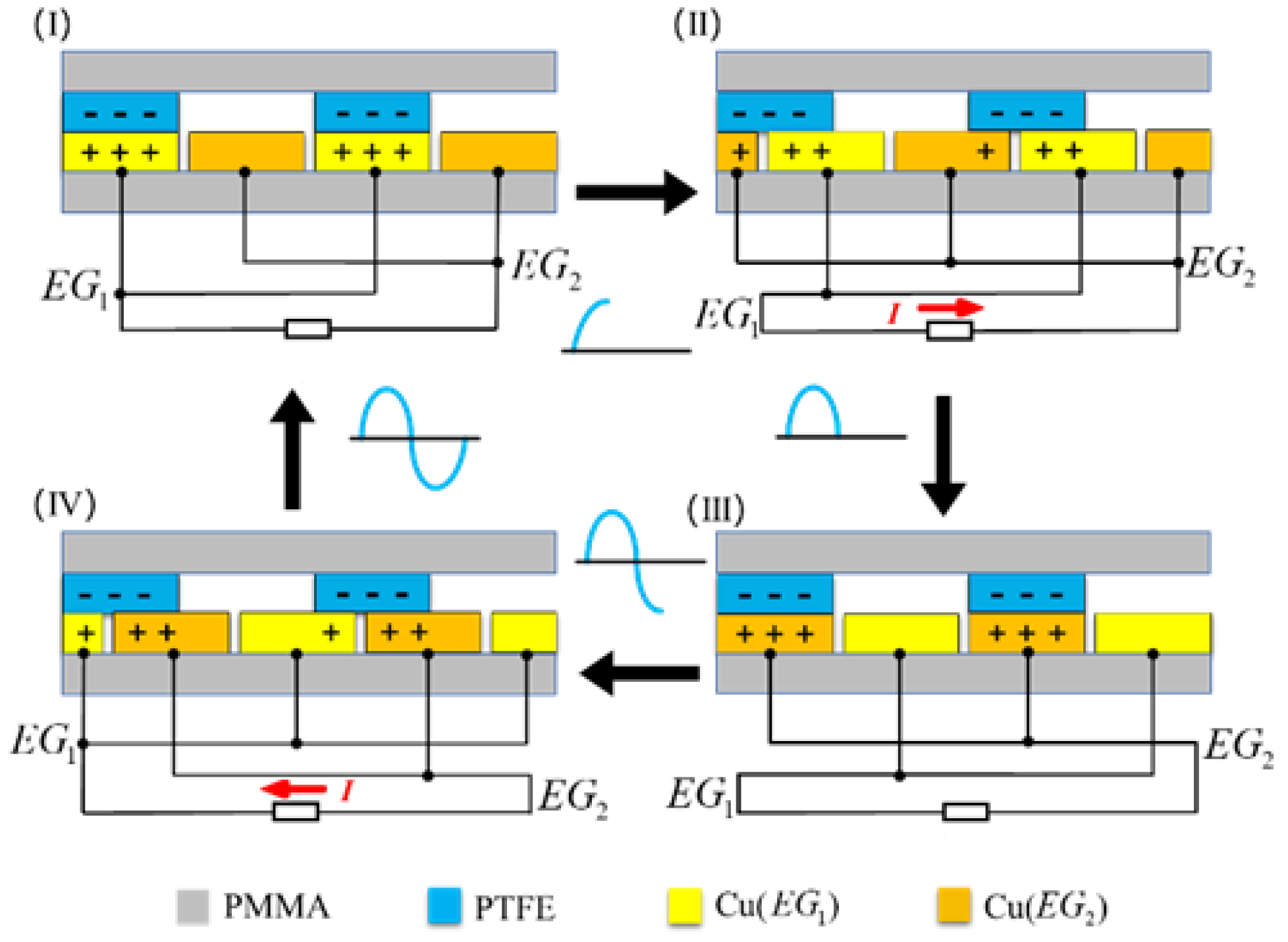
2.1. Structure and Working Principle
2.2. The Relationship between Current and Speed
2.3. The Relationship between Voltage and Displacement
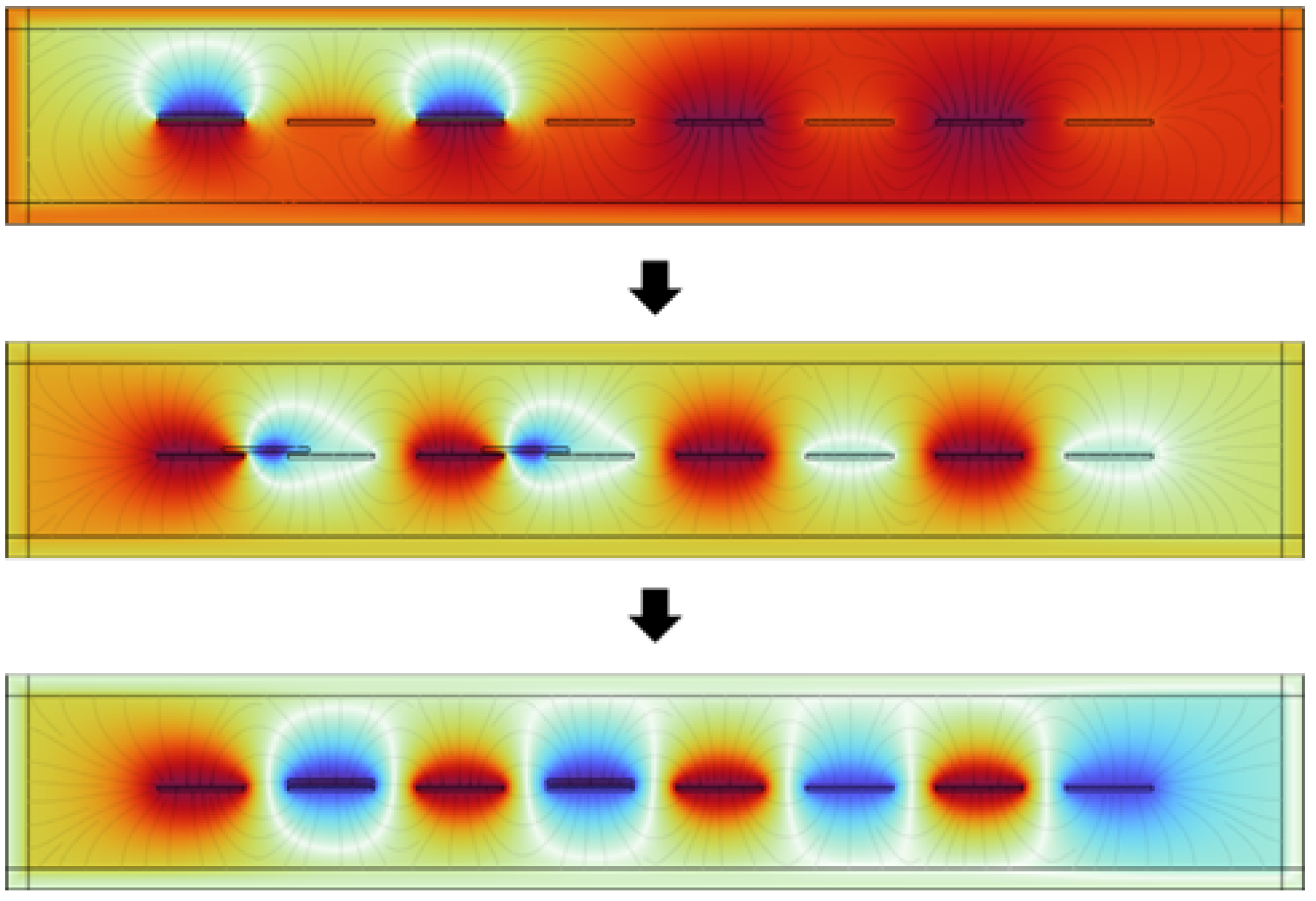
3. Simulation
3.1. The Relationship between Voltage and Displacement and Velocity
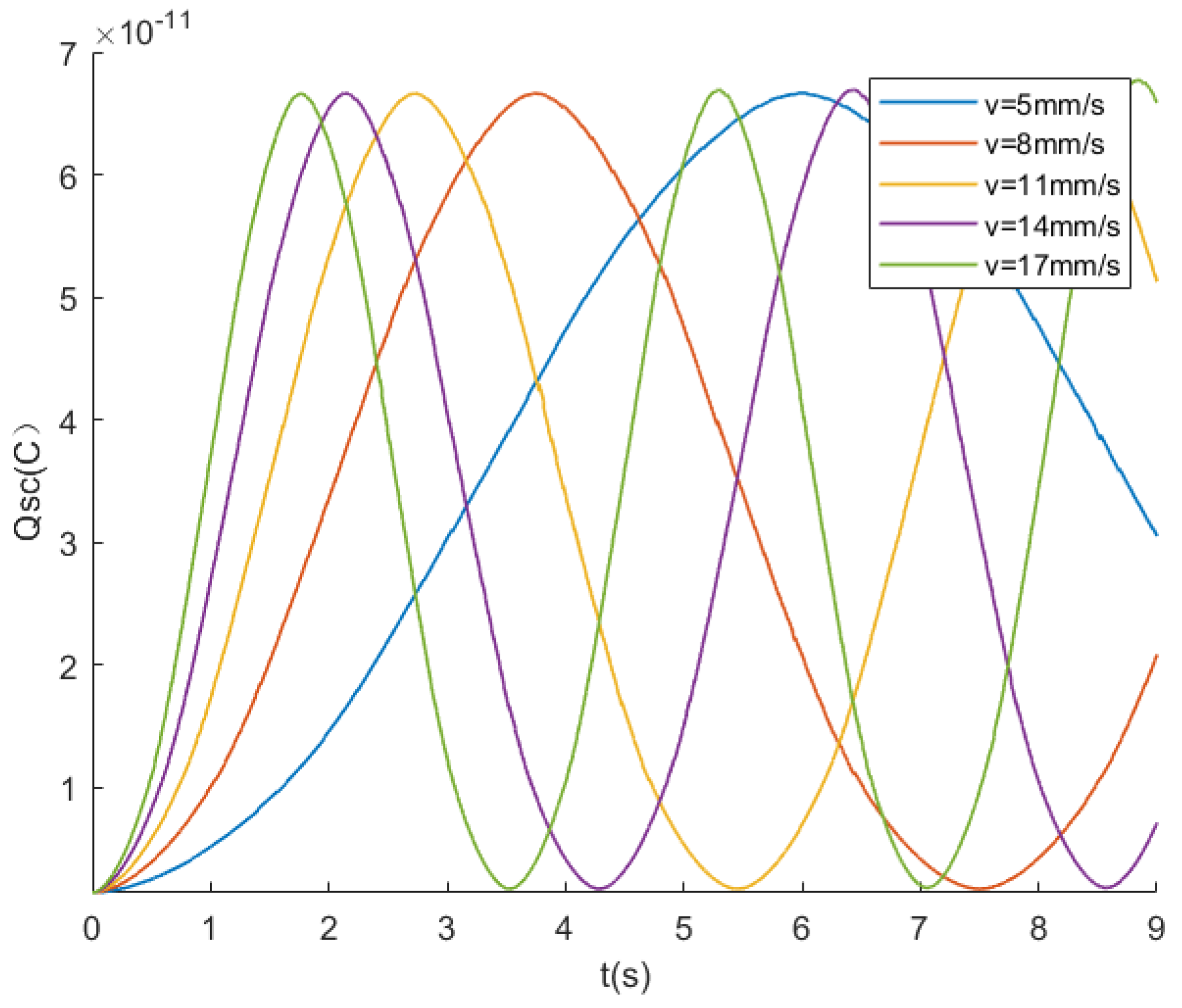
3.2. The Relationship between Charge Transfer, Displacement, and Velocity
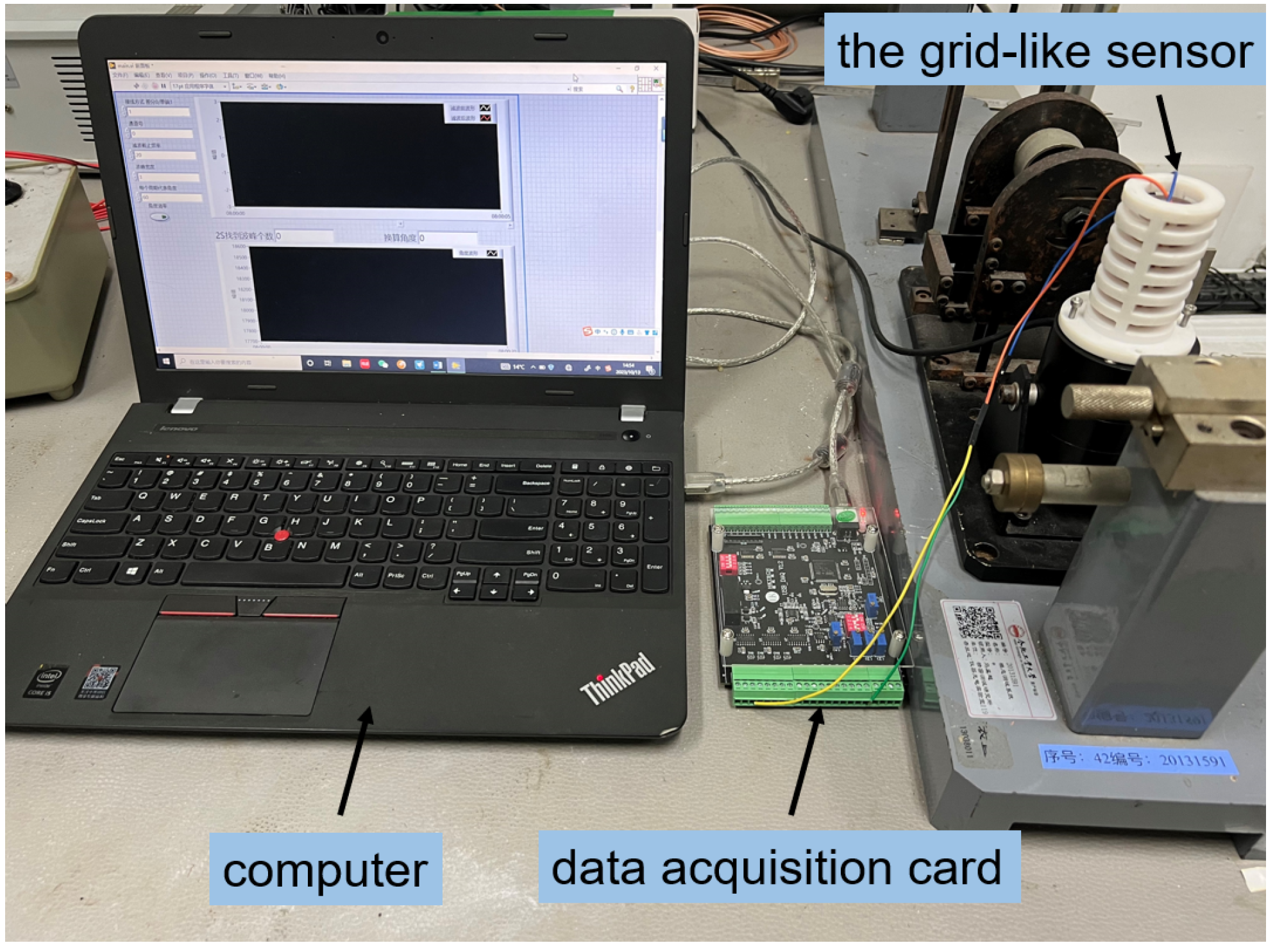
4. Experiments and Analysis
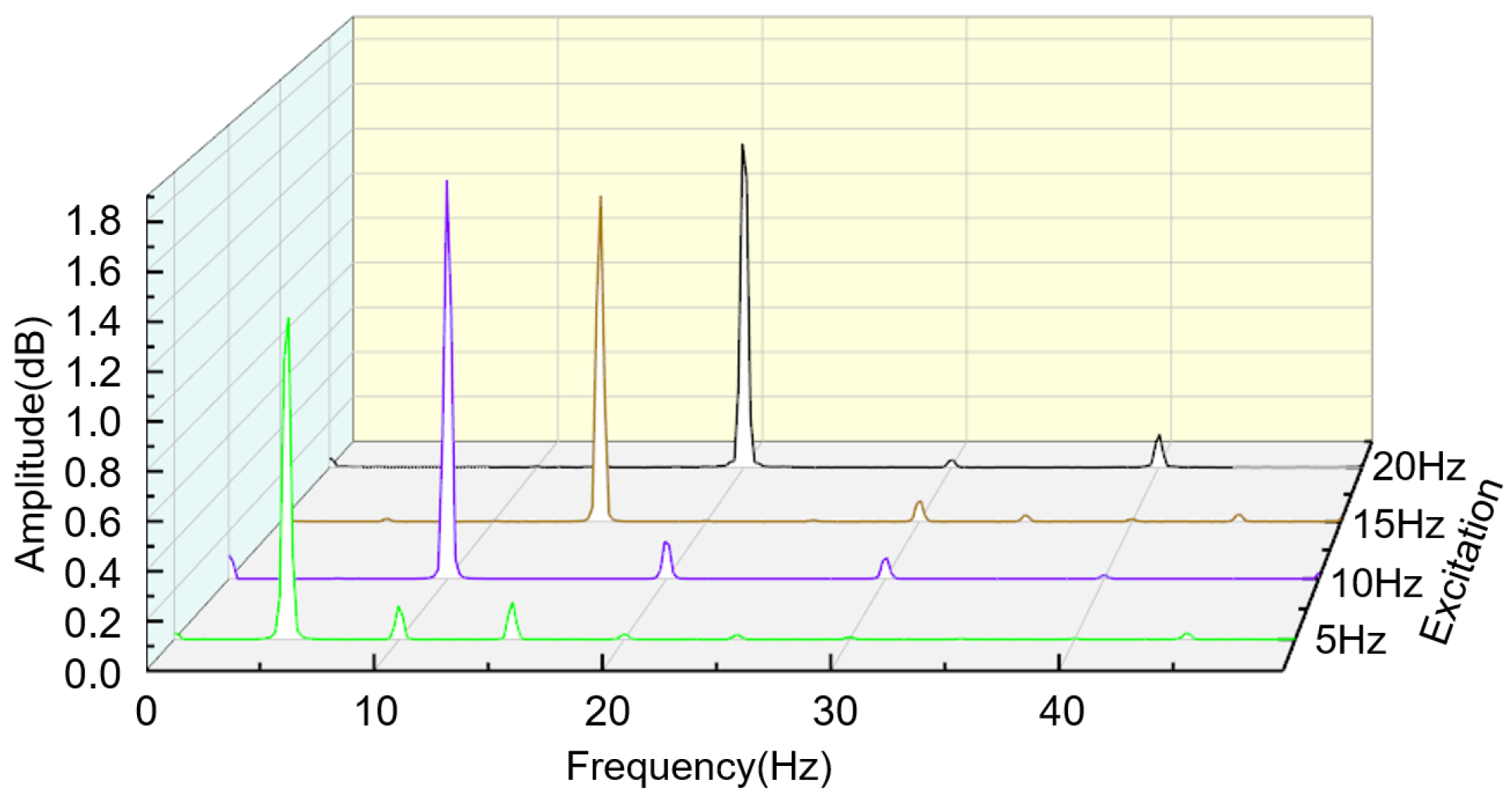
4.1. Frequency Characteristic Experiment of Sensing Device
4.2. Velocity Characteristic Experiment of Sensing Device
4.3. Output Stability Experiment of Sensing Device
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liao, Y.; Yang, H.; Liao, Q.; Si, W.; Chu, Y.; Chu, X.; Qin, L. A Review of Flexible Acceleration Sensors Based on Piezoelectric Materials: Performance Characterization, Parametric Analysis, Frontier Technologies, and Applications. Coatings 2023, 13, 1252. [Google Scholar] [CrossRef]
- Kocherla, A.; Duddi, M.; Subramaniam, K.V. Smart embedded PZT sensor for in-situ elastic property and vibration measurements in concrete. Measurement 2021, 173, 108629. [Google Scholar] [CrossRef]
- Hu, G.; Wang, J.; Deng, H.; Ma, M.; Zhong, X. Dynamic 3D Measurement without Motion Artifacts Based on Feature Compensation. Sensors 2023, 23, 7147. [Google Scholar] [CrossRef]
- Pan, M.; Yang, Y.; Guan, F.; Hu, H.; Xu, H. Sparse Representation Based Frequency Detection and Uncertainty Reduction in Blade Tip Timing Measurement for Multi-Mode Blade Vibration Monitoring. Sensors 2017, 17, 1745. [Google Scholar] [CrossRef] [PubMed]
- Shan, X.; Tang, L.; Wen, H.; Martinek, R.; Smulko, J. Analysis of Vibration and Acoustic Signals for Noncontact Measurement of Engine Rotation Speed. Sensors 2020, 20, 683. [Google Scholar] [CrossRef] [PubMed]
- Cakar, O.; Sanliturk, K. Elimination of transducer mass loading effects from frequency response functions. Mech. Syst. Signal Process. 2005, 19, 87–104. [Google Scholar] [CrossRef]
- Bi, S.; Ren, J.; Wang, W.; Zong, G. Elimination of transducer mass loading effects in shaker modal testing. Mech. Syst. Signal Process. 2013, 38, 265–275. [Google Scholar] [CrossRef]
- Wang, Y.C.; Shyu, L.H.; Chang, C.P. The Comparison of Environmental Effects on Michelson and Fabry-Perot Interferometers Utilized for the Displacement Measurement. Sensors 2010, 10, 2577–2586. [Google Scholar] [CrossRef] [PubMed]
- Khandelwal, G.; Dahiya, R. Self-Powered Active Sensing Based on Triboelectric Generators. Adv. Mater. 2022, 34, 2200724. [Google Scholar] [CrossRef]
- Yang, T.; Zhou, S.; Litak, G.; Jing, X. Recent advances in correlation and integration between vibration control, energy harvesting and monitoring. Nonlinear Dyn. 2023, 111, 20525–20562. [Google Scholar] [CrossRef]
- Lai, Z.; Xu, J.; Bowen, C.R.; Zhou, S. Self-powered and self-sensing devices based on human motion. Joule 2022, 6, 1501–1565. [Google Scholar] [CrossRef]
- Nehl, T.W.; Betts, J.A.; Mihalko, L.S. An integrated relative velocity sensor for real-time damping applications. IEEE Trans. Ind. Appl. 1996, 32, 873–881. [Google Scholar] [CrossRef]
- Hu, G.; Ru, Y.; Li, W. Design and development of a novel displacement differential self-induced magnetorheological damper. J. Intell. Mater. Syst. Struct. 2015, 26, 527–540. [Google Scholar] [CrossRef]
- Hu, G.; Lu, Y.; Sun, S.; Li, W. Development of a self-sensing magnetorheological damper with magnets in-line coil mechanism. Sens. Actuators A Phys. 2017, 255, 71–78. [Google Scholar] [CrossRef]
- Choi, K.M.; Jung, H.J.; Lee, H.J.; Cho, S.W. Feasibility study of an MR damper-based smart passive control system employing an electromagnetic induction device. Smart Mater. Struct. 2007, 16, 2323. [Google Scholar] [CrossRef]
- Zhang, C.; Tang, W.; Han, C.; Fan, F.; Wang, Z.L. Theoretical comparison, equivalent transformation, and conjunction operations of electromagnetic induction generator and triboelectric nanogenerator for harvesting mechanical energy. Adv. Mater. 2014, 26, 3580–3591. [Google Scholar] [CrossRef]
- Zhao, J.; Zhen, G.; Liu, G.; Bu, T.; Liu, W.; Fu, X.; Zhang, P.; Zhang, C.; Wang, Z.L. Remarkable merits of triboelectric nanogenerator than electromagnetic generator for harvesting small-amplitude mechanical energy. Nano Energy 2019, 61, 111–118. [Google Scholar] [CrossRef]
- Puers, R. Capacitive sensors: When and how to use them. Sens. Actuators A Phys. 1993, 37-38, 93–105. [Google Scholar] [CrossRef]
- Fiorillo, A.S.; Critello, C.; Pullano, S. Theory, technology and applications of piezoresistive sensors: A review. Sens. Actuators A Phys. 2018, 281, 156–175. [Google Scholar] [CrossRef]
- Fan, F.R.; Tian, Z.Q.; Wang, Z.L. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Wang, Z.L. On Maxwell’s displacement current for energy and sensors: The origin of nanogenerators. Mater. Today 2017, 20, 74–82. [Google Scholar] [CrossRef]
- Wang, Z.L.; Chen, J.; Lin, L. Progress in triboelectric nanogenerators as a new energy technology and self-powered sensors. Energy Environ. Sci. 2015, 8, 2250–2282. [Google Scholar] [CrossRef]
- Chandrashekar, B.N.; Deng, B.; Smitha, A.S.; Chen, Y.; Tan, C.; Zhang, H.; Peng, H.; Liu, Z. Roll-to-roll green transfer of CVD graphene onto plastic for a transparent and flexible triboelectric nanogenerator. Adv. Mater. 2015, 27, 5210–5216. [Google Scholar] [CrossRef]
- Parida, K.; Thangavel, G.; Cai, G.; Zhou, X.; Park, S.; Xiong, J.; Lee, P.S. Extremely stretchable and self-healing conductor based on thermoplastic elastomer for all-three-dimensional printed triboelectric nanogenerator. Nat. Commun. 2019, 10, 2158. [Google Scholar] [CrossRef] [PubMed]
- Pu, X.; Liu, M.; Chen, X.; Sun, J.; Du, C.; Zhang, Y.; Zhai, J.; Hu, W.; Wang, Z.L. Ultrastretchable, transparent triboelectric nanogenerator as electronic skin for biomechanical energy harvesting and tactile sensing. Sci. Adv. 2017, 3, e1700015. [Google Scholar] [CrossRef] [PubMed]
- Fan, X.; Chen, J.; Yang, J.; Bai, P.; Li, Z.; Wang, Z.L. Ultrathin, rollable, paper-based triboelectric nanogenerator for acoustic energy harvesting and self-powered sound recording. ACS Nano 2015, 9, 4236–4243. [Google Scholar] [CrossRef]
- Hinchet, R.; Yoon, H.J.; Ryu, H.; Kim, M.K.; Choi, E.K.; Kim, D.S.; Kim, S.W. Transcutaneous ultrasound energy harvesting using capacitive triboelectric technology. Science 2019, 365, 491–494. [Google Scholar] [CrossRef]
- Mao, Y.; Wen, Y.; Liu, B.; Sun, F.; Zhu, Y.; Wang, J.; Zhang, R.; Yu, Z.; Chu, L.; Zhou, A. Flexible wearable intelligent sensing system for wheelchair sports monitoring. iScience 2023, 26, 108126. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Zhao, T.; Sun, F.; Jia, C.; Ye, H.; Jiang, Y.; Wang, K.; Huang, C.; Xie, Y.; Mao, Y. Multi-functional triboelectric nanogenerators on printed circuit board for metaverse sport interactive system. Nano Energy 2023, 113, 108520. [Google Scholar] [CrossRef]
- Wang, S.; Lin, L.; Wang, Z.L. Triboelectric nanogenerators as self-powered active sensors. Nano Energy 2015, 11, 436–462. [Google Scholar] [CrossRef]
- Tang, Y.; Xuan, W.; Zhang, C.; Xu, L.; Liu, F.; Chen, J.; Jin, H.; Ye, Z.; Cao, Z.; Li, Y.; et al. Fully self-powered instantaneous wireless traffic monitoring system based on triboelectric nanogenerator and magnetic resonance coupling. Nano Energy 2021, 89, 106429. [Google Scholar] [CrossRef]
- Pu, X.; Guo, H.; Chen, J.; Wang, X.; Xi, Y.; Hu, C.; Wang, Z.L. Eye motion triggered self-powered mechnosensational communication system using triboelectric nanogenerator. Sci. Adv. 2017, 3, e1700694. [Google Scholar] [CrossRef] [PubMed]
- Niu, S.; Liu, Y.; Wang, S.; Lin, L.; Zhou, Y.S.; Hu, Y.; Wang, Z.L. Theory of sliding-mode triboelectric nanogenerators. Adv. Mater. 2013, 25, 6184–6193. [Google Scholar] [CrossRef] [PubMed]
- Zhu, G.; Chen, J.; Zhang, T.; Jing, Q.; Wang, Z.L. Radial-arrayed rotary electrification for high performance triboelectric generator. Nat. Commun. 2014, 5, 3426. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Parameters | Dimensions (mm) |
|---|---|
| Axial length of electrode, a | 54 |
| Length of single-electrode grid, b | 60 |
| Axial length of triboelectric layer, c | 65 |
| Length of triboelectric layer, d | 75.4 |
| Width of triboelectric layer grid, e | 5 |
| Vertical gap in triboelectric layer, f | 5 |
| Horizontal gap in triboelectric layer, g | 32.7 |
| Width of single-electrode grid, h | 3 |
| Horizontal gap between adjacent electrode grids, i | 1 |
| Vertical gap between adjacent electrode grids, j | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Han, G.; Deng, H.; Ma, M.; Zhong, X. Research on the Sensing Characteristics of an Integrated Grid-like Sensor Based on a Triboelectric Nanogenerator. Sensors 2024, 24, 869. https://doi.org/10.3390/s24030869
Zhao S, Han G, Deng H, Ma M, Zhong X. Research on the Sensing Characteristics of an Integrated Grid-like Sensor Based on a Triboelectric Nanogenerator. Sensors. 2024; 24(3):869. https://doi.org/10.3390/s24030869
Chicago/Turabian StyleZhao, Shiyu, Guanghui Han, Huaxia Deng, Mengchao Ma, and Xiang Zhong. 2024. "Research on the Sensing Characteristics of an Integrated Grid-like Sensor Based on a Triboelectric Nanogenerator" Sensors 24, no. 3: 869. https://doi.org/10.3390/s24030869