
RC-LAHR: Road-Side-Unit-Assisted Cloud-Based Location-Aware Hybrid Routing for Software-Defined Vehicular Ad Hoc Networks

Abstract
:1. Introduction
2. Background and Related Work
3. Motivation and Research Contribution
Research Contribution
- A novel hybrid hierarchical architecture within the SDN framework for VANETs is introduced that integrates cloud computing capabilities with VANET infrastructure, addressing the dynamic nature and heterogeneity of vehicular networks.
- The formulation of the RC-LAHR protocol is a primary contribution. This protocol leverages cloud computing for data handling and location-based information to optimize routing.
- RC-LAHR significantly improves the reliability and scalability of message dissemination in VANETs. By efficiently handling frequent topology changes and varied hardware, it ensures more stable and consistent communication in vehicular networks.
- A time complexity analysis is performed to test the efficacy of the proposed routing protocol. The proposed routing protocol works in O(n3) time complexity.
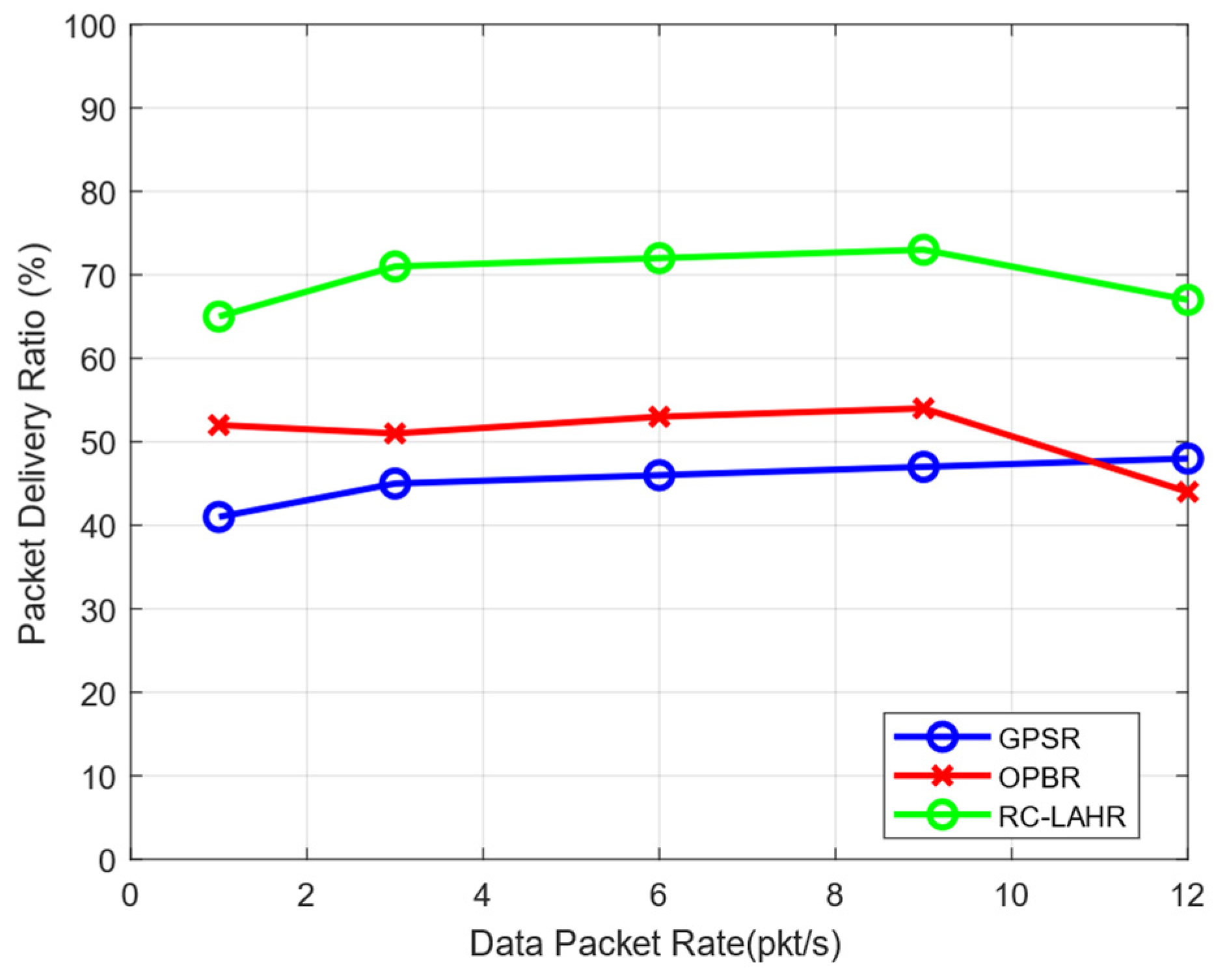
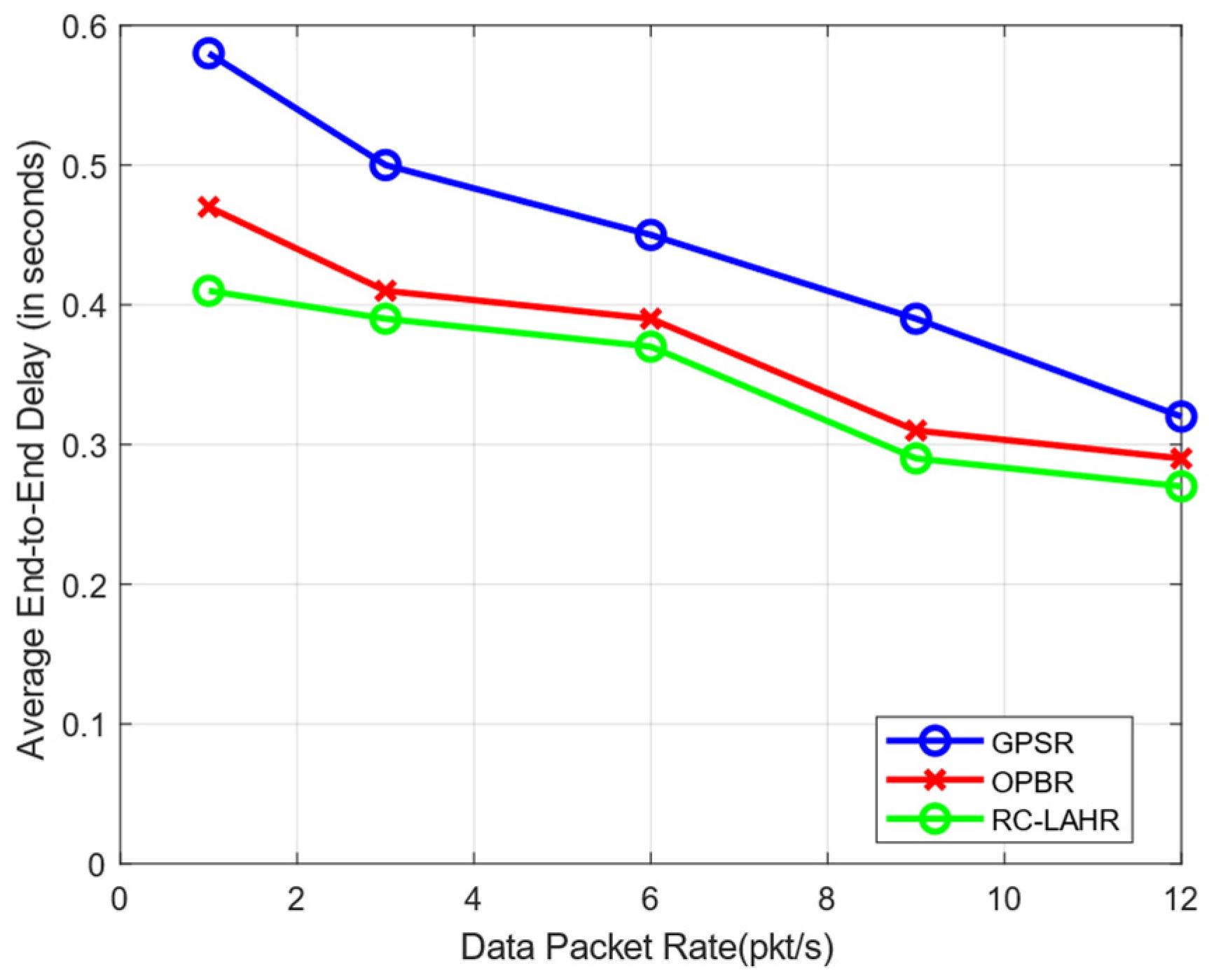
- Our comprehensive comparative analysis of RC-LAHR with existing protocols like GPSR and OPBR, focusing on PDR, EED, and network reliability, provides empirical evidence of the superiority of RC-LAHR.
4. System Model and Proposed Framework
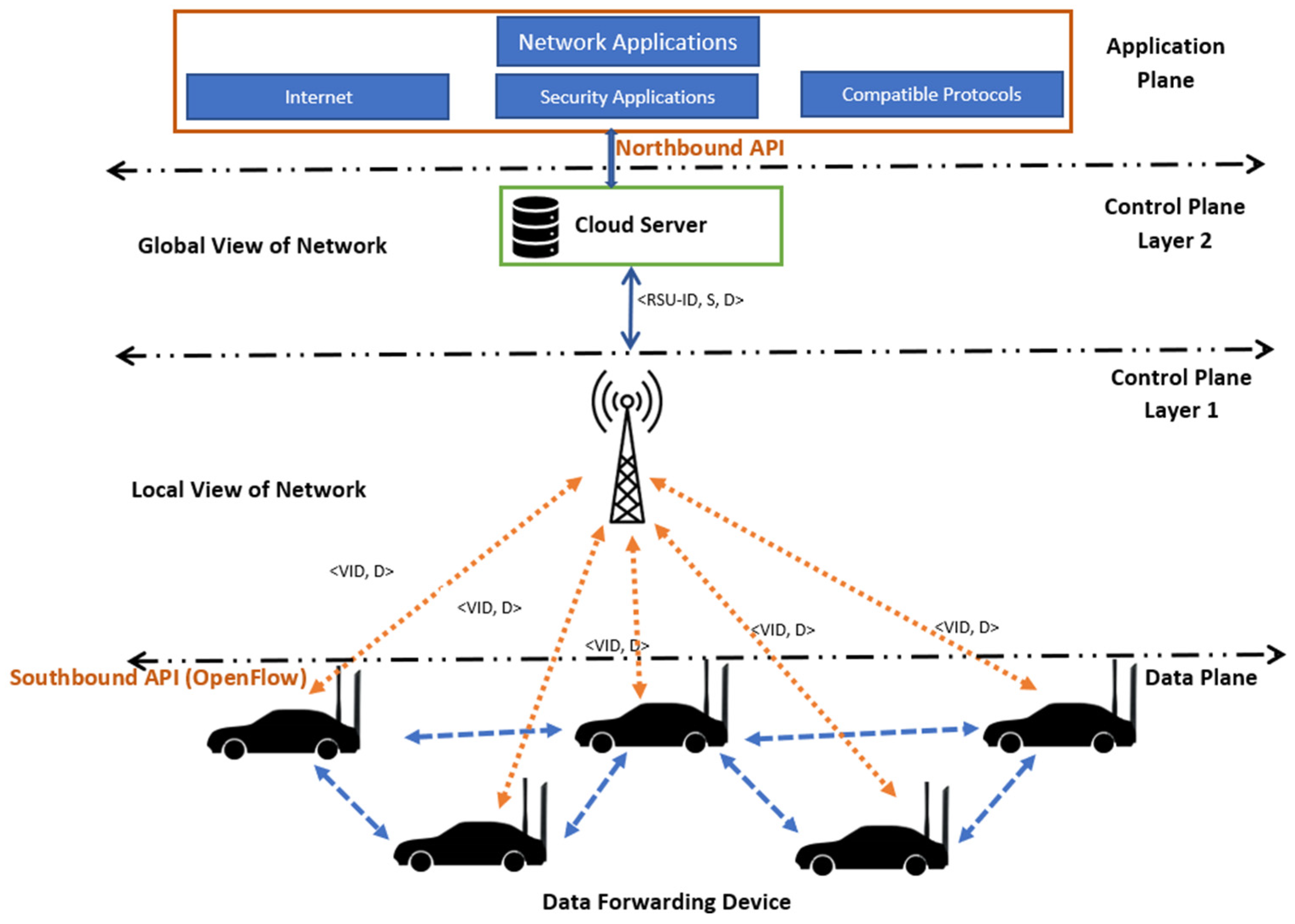
4.1. Proposed Architecture
- Data Plane: This plane of the framework contains the data-forwarding module. The vehicles are equipped with high-speed Wi-Fi to forward the data, based on IEEE 802.11ac standards [45]. However, like the normal SDN, these data planes also have the capability to store the route locally for a given time period. If the sender node starts sending data, it first searches the locally stored routes. If the route is valid, it starts transmitting data; otherwise, it goes to the control plane for the new rules.
- Control Plane: The control plane is divided into two parts to reduce the load on the control plane. Control plane layer 1 covers the logical local topology of the network. RSU serves as layer 1 of the control plane. Layer 2 collects all the information from the RSUs in its region, and finally, it keeps the global topological view of its region. It may communicate with other control plane layer 2 stations. Control plane layer 2 is also capable of performing analyses and making decisions. This layer can be used for machine learning and AI-based utilities in SD-VANETs. The cloud server has been used to act as a control plane layer 2.
- Application Plane: The application plane of the framework provides facilities like network security policies, user-based applications, the internet, etc. Control plane layer 2 interacts with the application plane using the northbound API of the OpenFlow protocol [46].
5. RC-LAHR: RSU-Assisted Cloud-Based Location-Aware Hybrid Routing
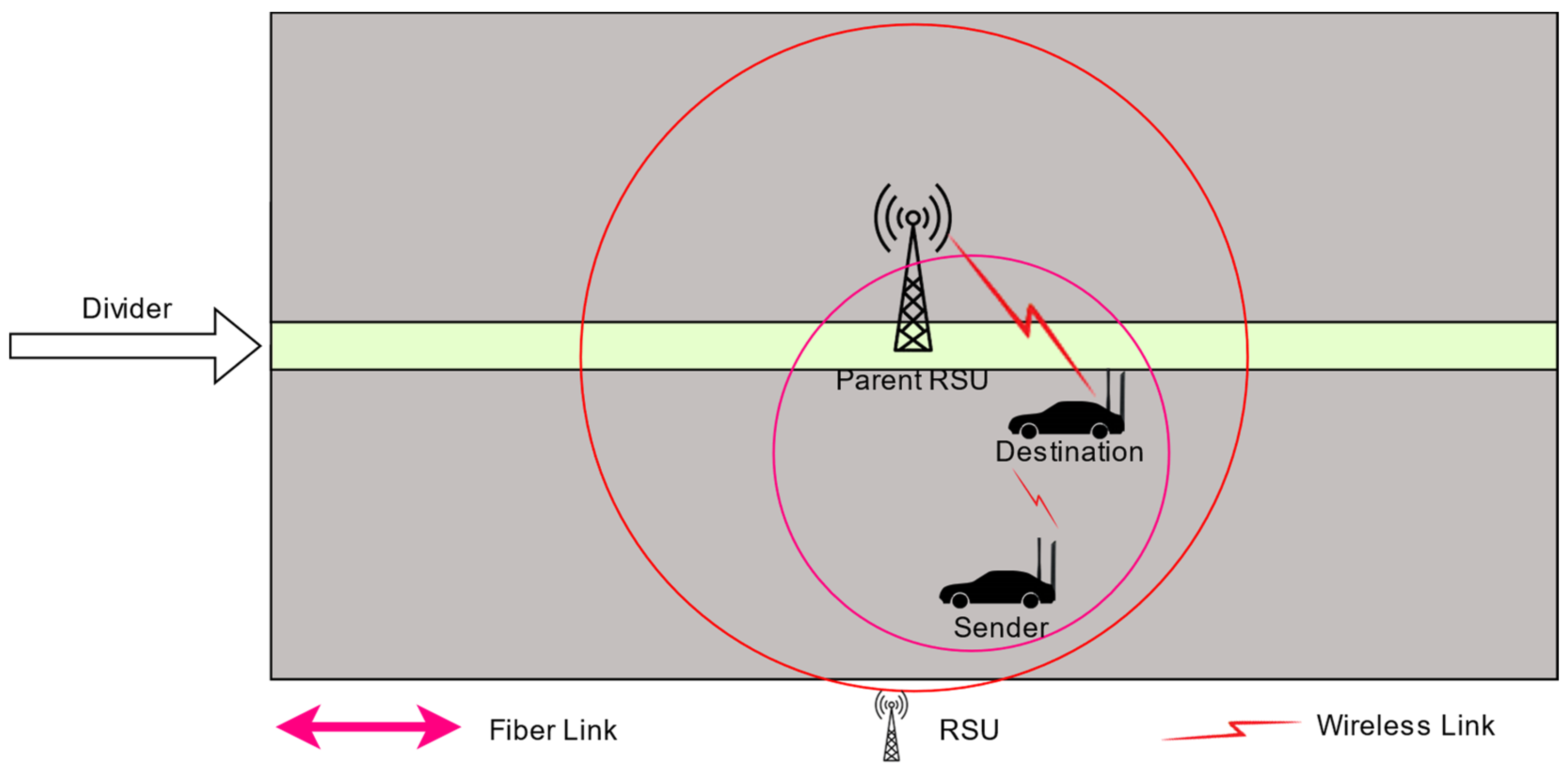
- The destination node is found in the range of the sender vehicle: Suppose that the sender node wants to communicate with the destination node, as shown in Figure 3.
- 2.
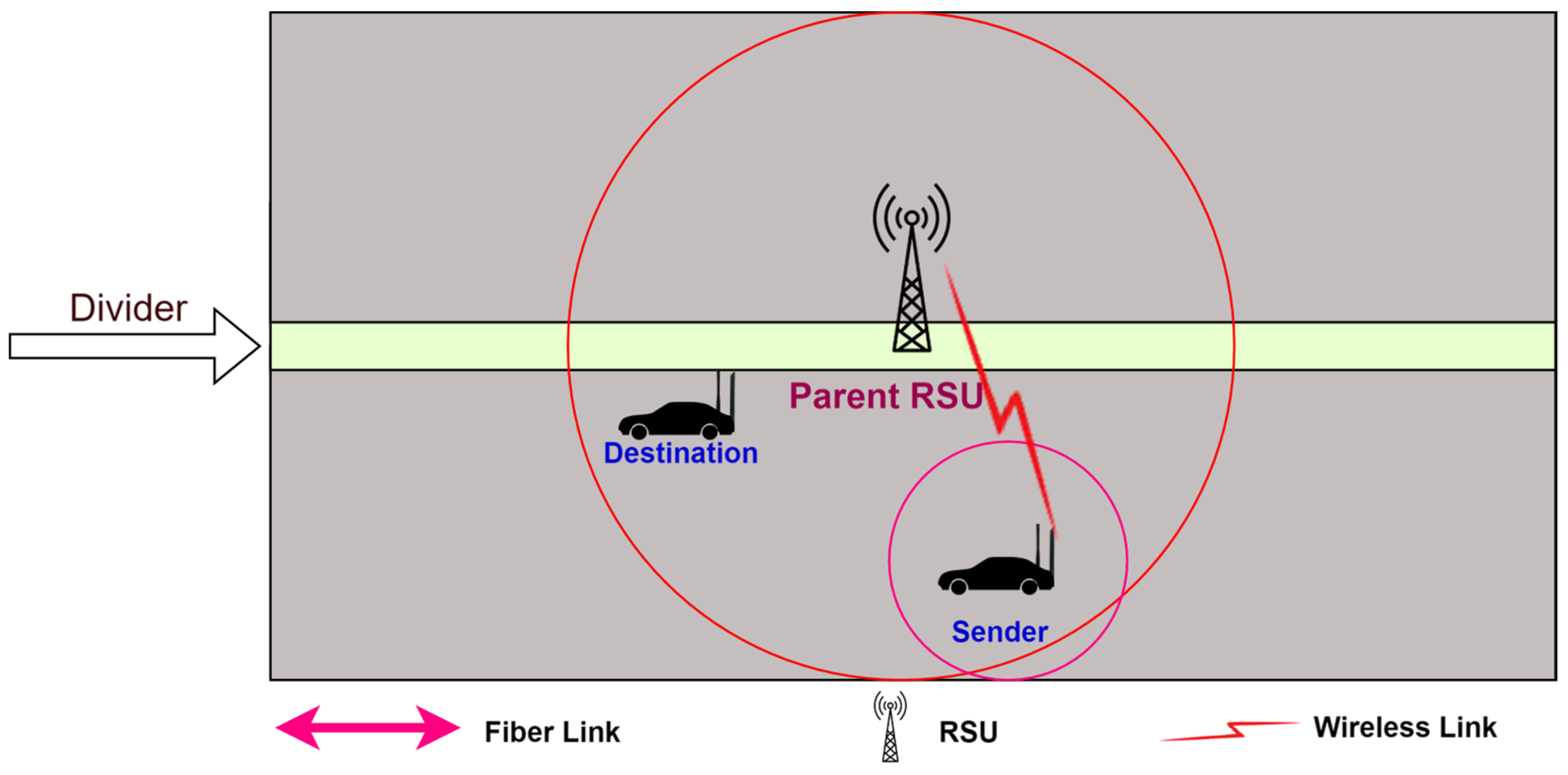
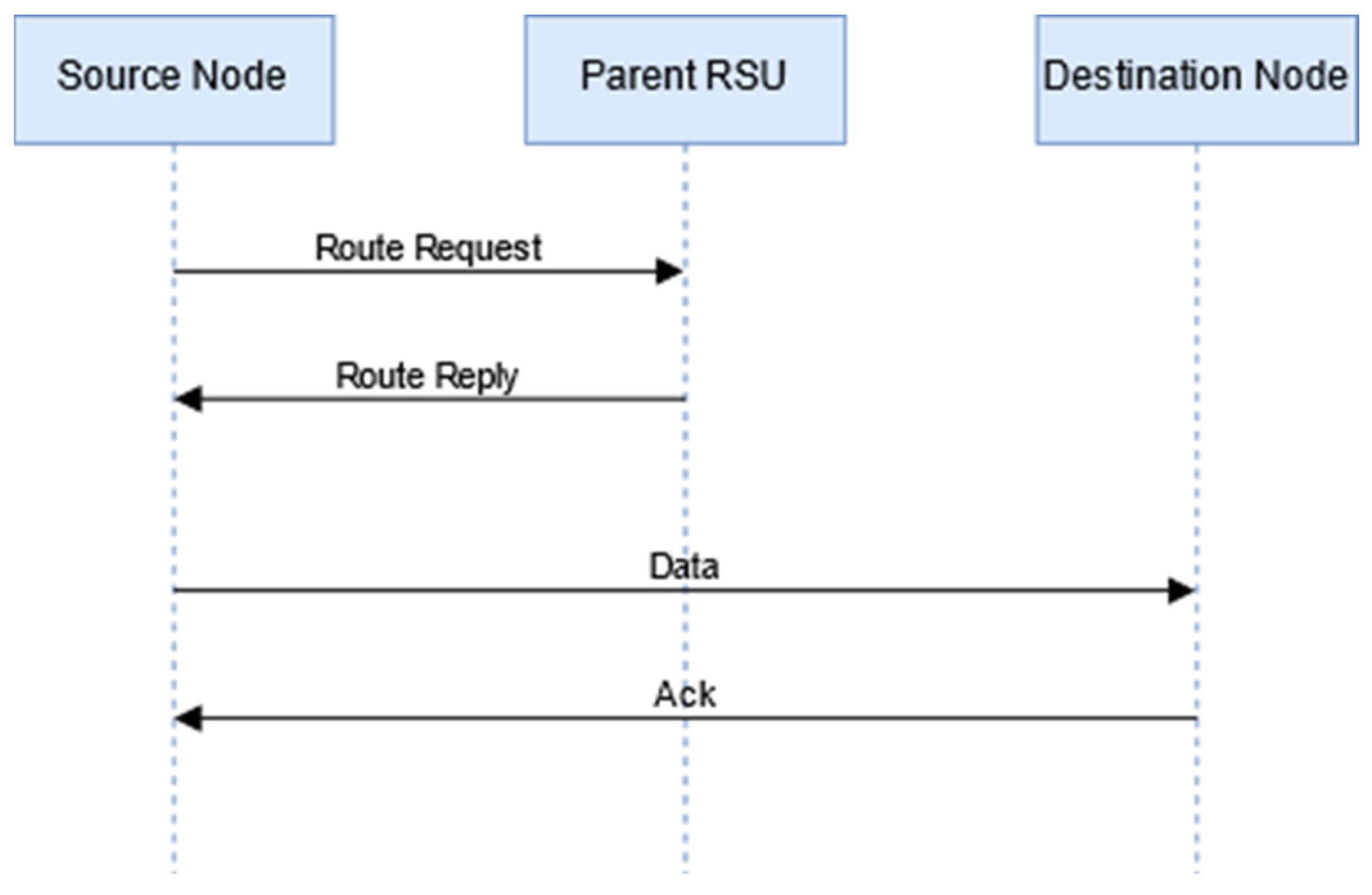
- The destination node is found in the range of the RSU but outside the range of the sender: The destination node is outside the range of the sender node, but the destination node is inside the range of the same RSU in which the sender node is available, as shown in Figure 5.
- 3.
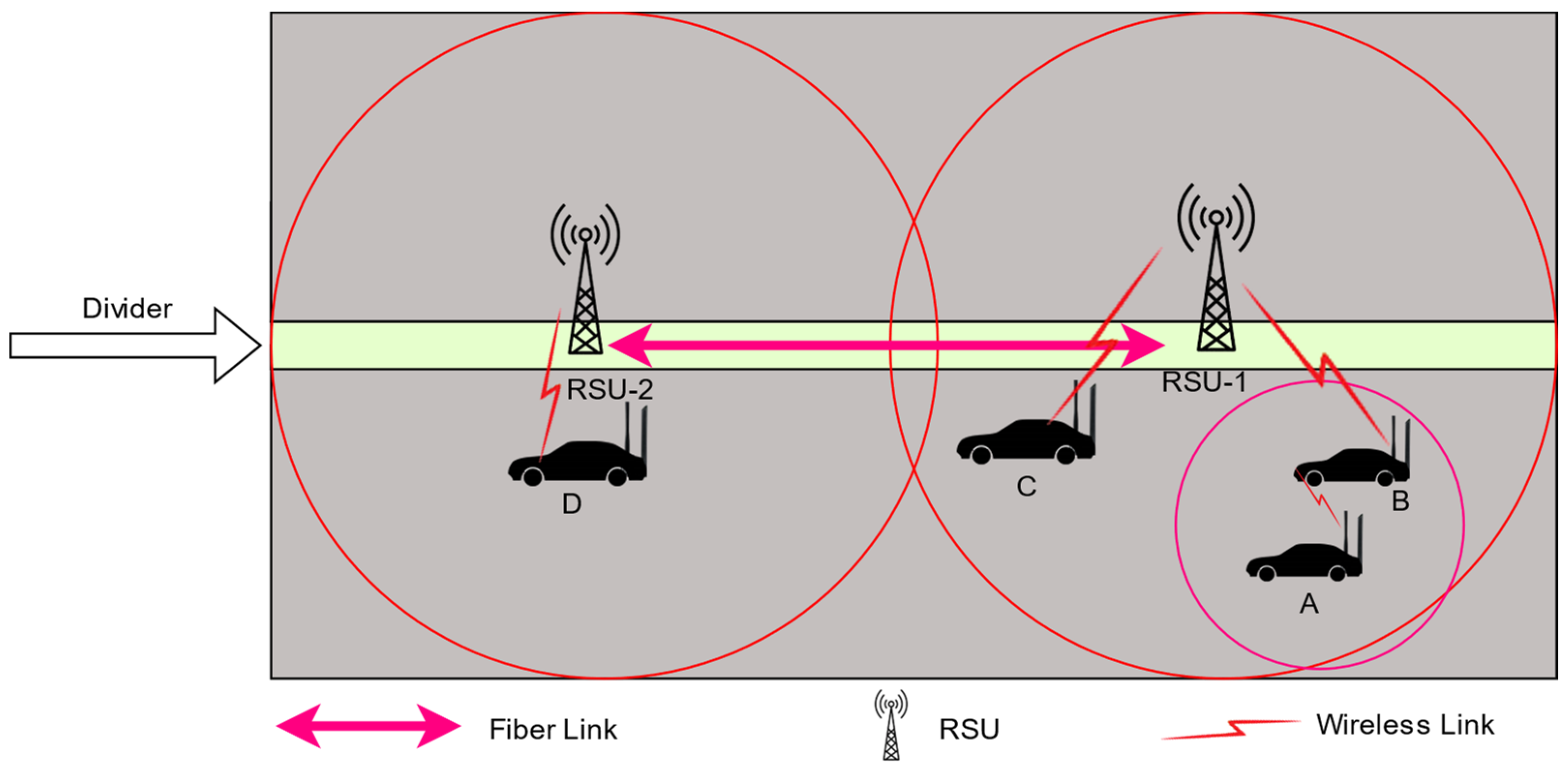
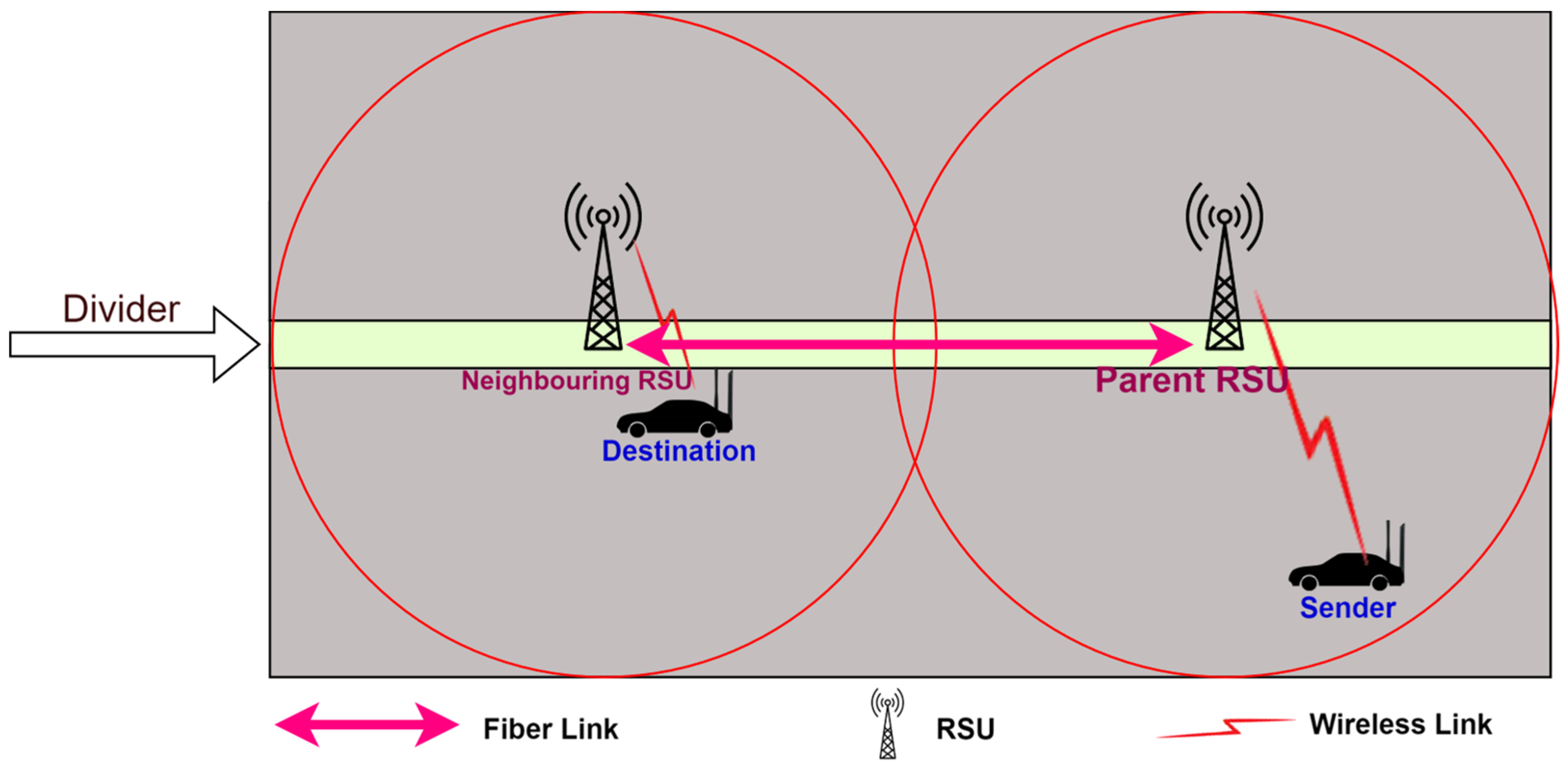
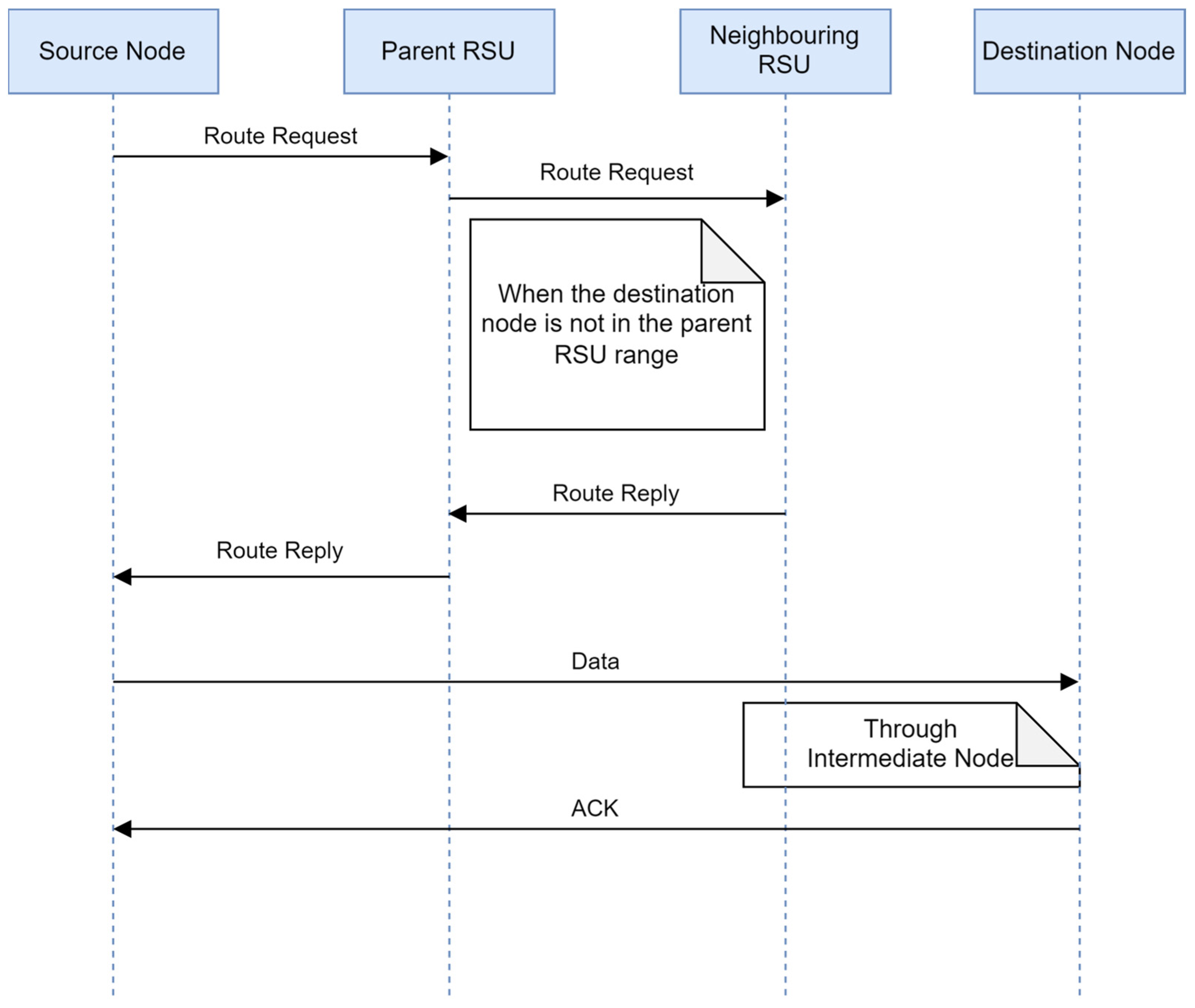
- The destination node is outside the range of the parent RSU but in the range of a neighboring RSU: In this case, the destination node is outside the range of the parent RSU, but inside the range of a neighboring RSU, as illustrated in Figure 7.
- 4.
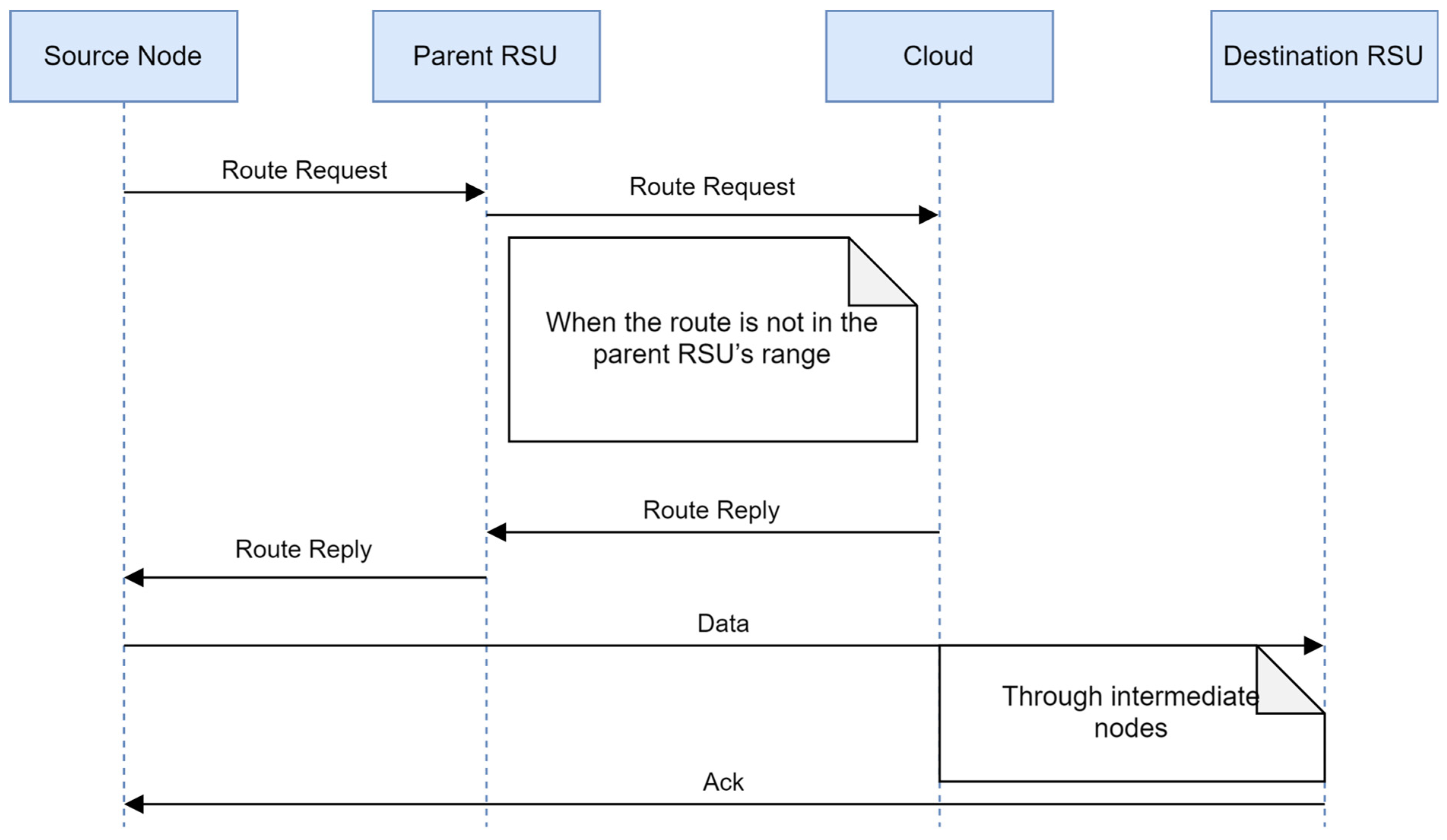
- The destination is not in the range of neighboring RSUs: If neither the parent RSU nor neighboring RSUs get the route for further communication, the parent RSU forwards the route request to the cloud as it has overall network information to find routes. Figure 9 illustrates the representation of the scenario. Figure 10 displays the communication process.
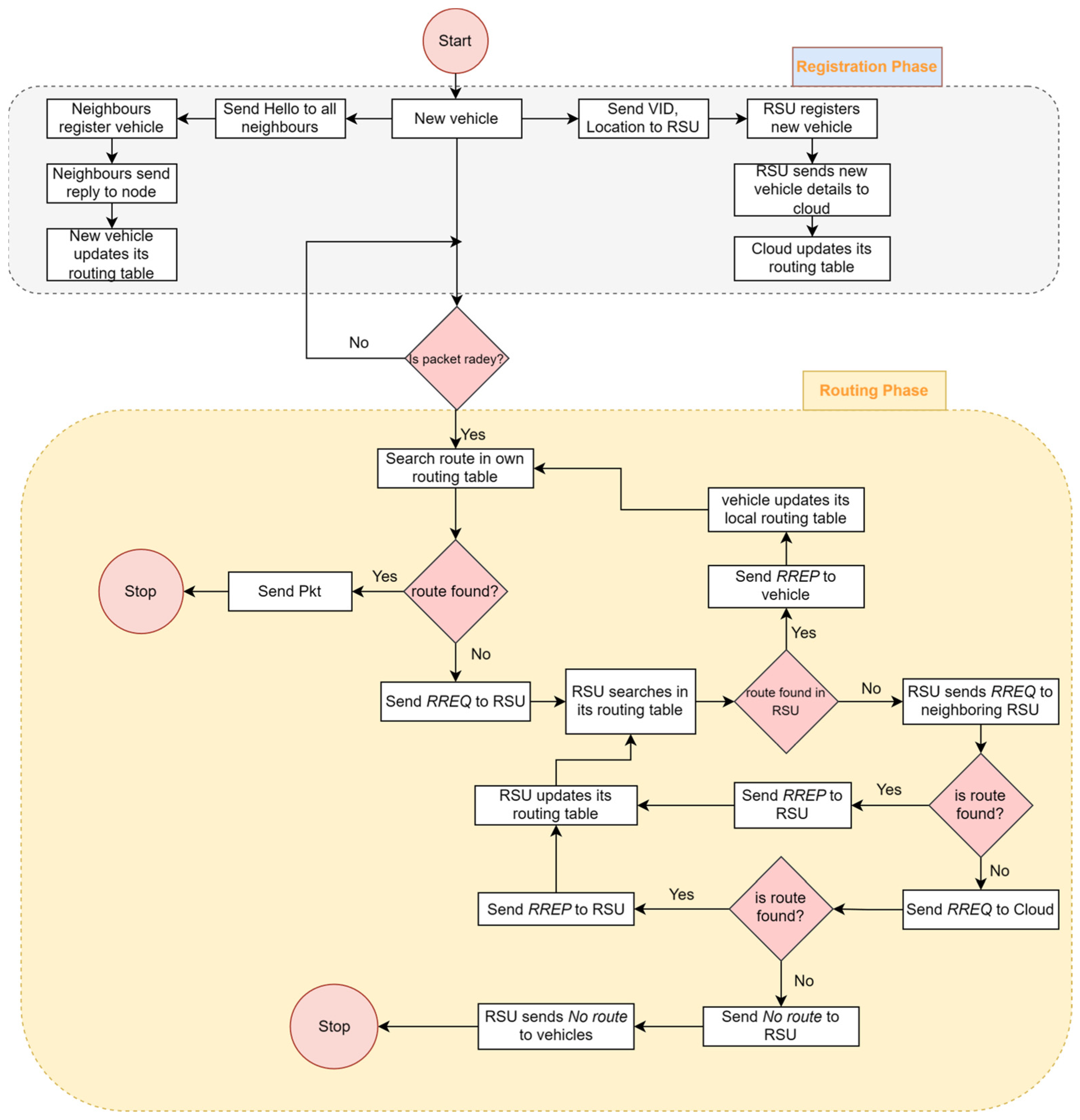
5.1. Registration Phase
| Algorithm 1: Registration |
| Input: VID=Vehicle ID, Pos=Current Location Output: Vehicle registration |
| 1. Begin |
| 2. RSUID getRSUID(VID, Pos) |
| 3. If Ischanged(RSUID)==True then |
| 4. List_neighbour Hello_broadcast (VID, Pos) |
| 5. UpdateRSU(VID, List_neighbour) |
| 6. Else |
| 7. If isNeighbourChanged(List_neighbour) then |
| 8. updateListNeighbour() |
| 9. updateRSU(VID, List_neighbour, Pos) |
| 10. End If |
| 11. End If |
| 12. End |
5.2. Route Discovery
| Algorithm 2: FindRoute(S, D, mlist) | |
| Input: S, D [S=Source, D=Destinationt] | |
| Output: mlist | |
| 1. | Begin |
| 2. | mlist=S |
| 3. | path=false |
| 4. | nlist=FindNeighbour(S) |
| 5. | While (nlist!=phi) |
| 6. | do |
| 7. | For each Vi nlist |
| 8. | do |
| 9. | If Vi=D then |
| 10. | path=true |
| 11. | mlist=mlistVi |
| 12. | break; |
| 13. | End If |
| 14. | If Vimlist then |
| 15. | temp=FindNeighbour(Vi) |
| 16. | nlist=append(nlist, temp) |
| 17. | mlist=mlist U Vi |
| 18. | End If |
| 19. | End For |
| 20. | If path=true then |
| 21. | break; |
| 22. | End If |
| 23. | End while |
| 24. | If path=true then |
| 25. | Return mlist |
| 26. | End If |
| 27. | else |
| 28. | Return null |
| 29. | End |
| Algorithm 3: FindNeighbour | |
| Input: VID=Vehicle ID Output: nexthop | |
| 1. | Begin |
| 2. | Priority:=0 |
| 3. | for each Vn in Vehicle_List[n][0…n] |
| 4. | If Vn.Priority ≥ Priority then |
| 5. | Priority=Vn.Priority |
| 6. | Temnode.loc=Vn.loc; |
| 7. | Tempnode.id=Vn.VID |
| 8. | Tempnode.RSU_ID=Vn.RSU-ID |
| 9. | End If |
| 10. | End For |
| 11. | Reutrn Tempnode |
| 12. | End |
5.3. Packet Forwarding
| Algorithm 4: PacketForward (S, D, H, P) | |
| Input: S = Source Node, D = Destination Node, H = Next Hop, P = Packet Output: Acknowledgement | |
| 1. | Begin |
| 2. | ACKsendPacket(S, D, H, P) //Sends the data packet |
| 3. | If ACK is not found then |
| 4. |
Ctr:=0; //initialise the counter ACK:=null // initialise the acknowledgement null While Ctr<ttl do |
| 5. | ACKSendPacket(S, D, H, P) |
| 6. | If ACK is found then |
| 7. | Return ACK; |
| 8. | End If |
| 9. | Done |
| 10. | If ACK is null then |
| 11. | InformRSU(S, D, H) |
| 12. | End If |
| 13. | Else |
| 14. | Return ACK; |
| 15. | End If |
| 16. | End |
6. Computational Complexity of RC-LAHR
7. Performance Evaluation and Analysis of Results
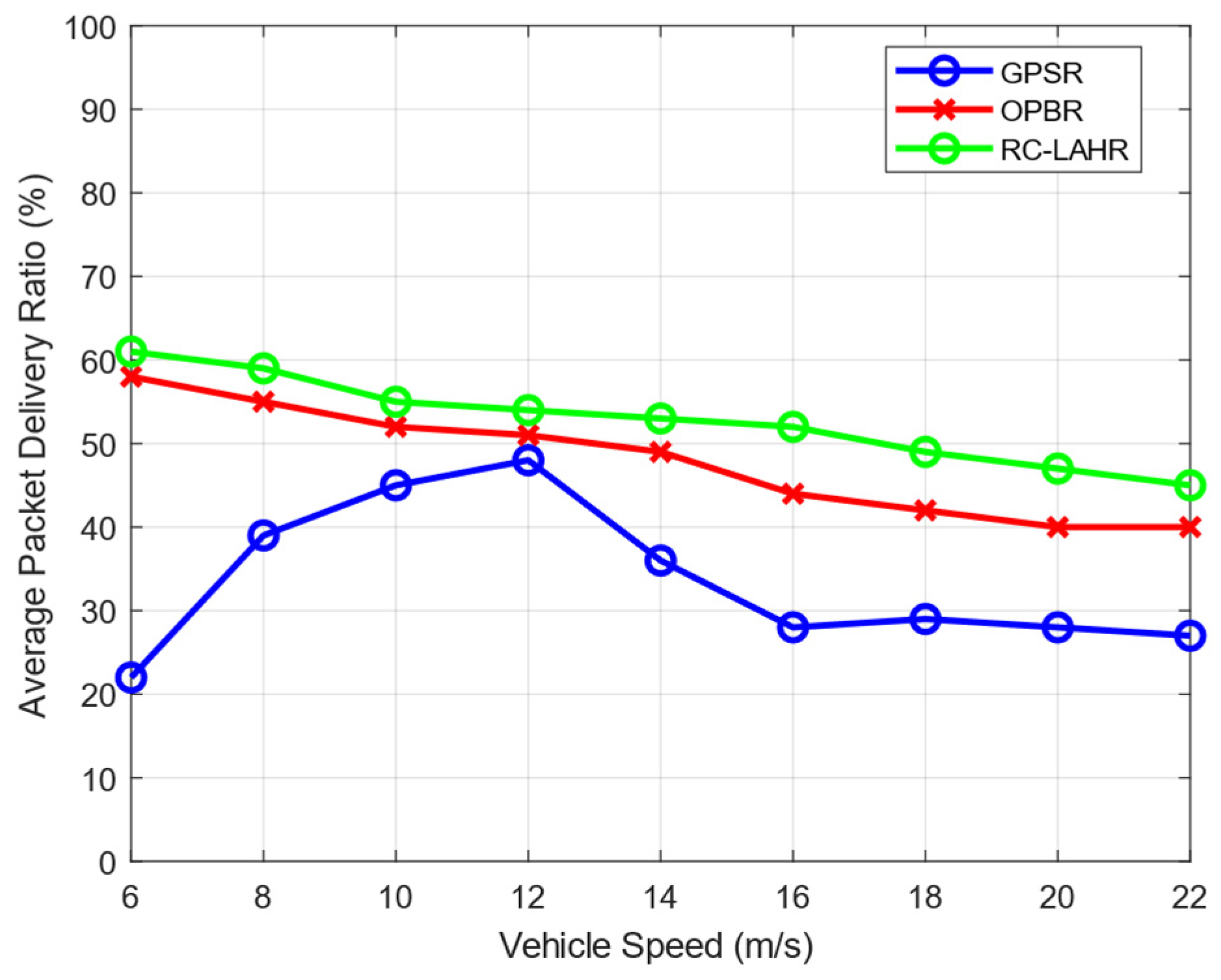
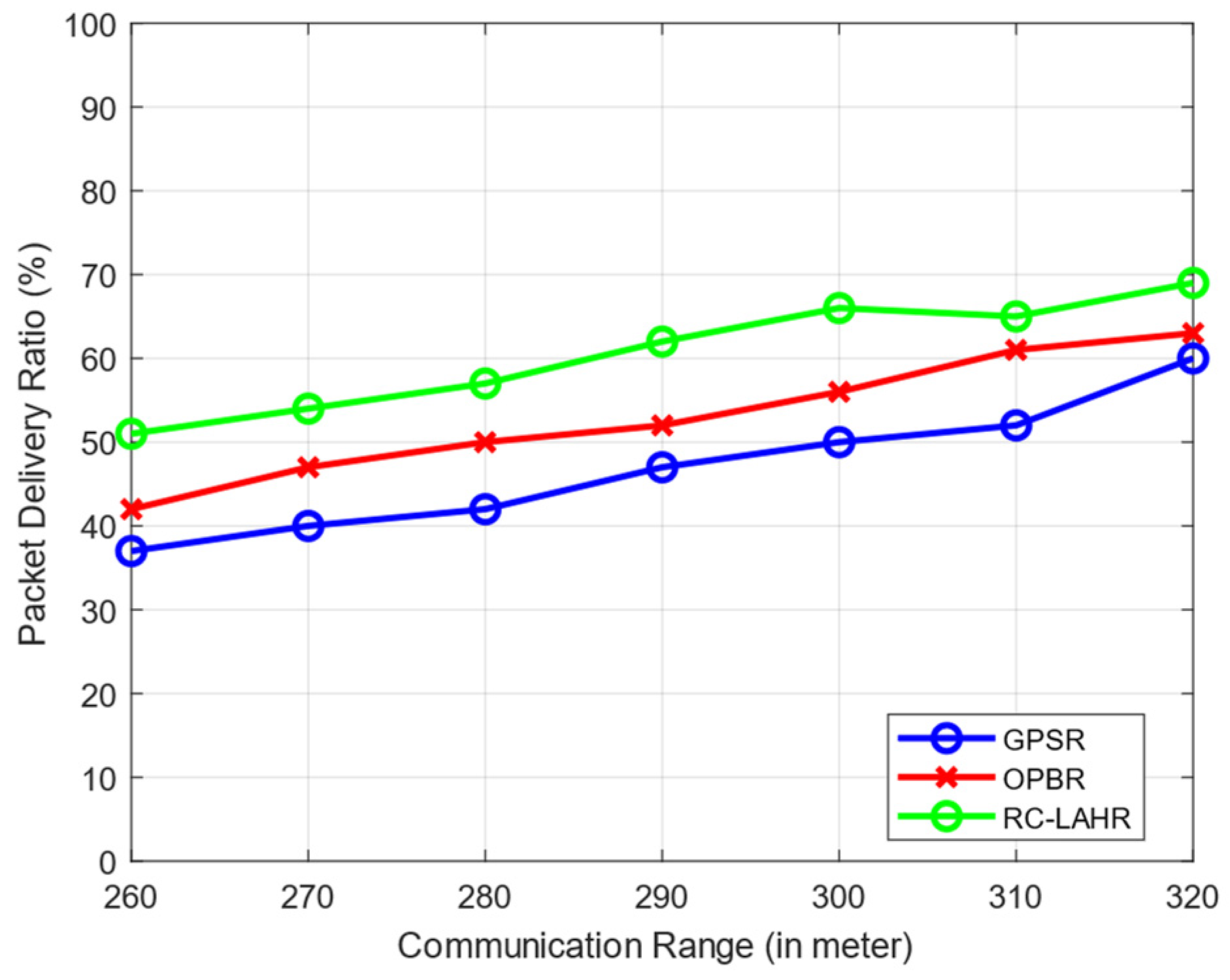
7.1. Packet Delivery Ratio Analysis
7.2. End-to-End Delay Analysis
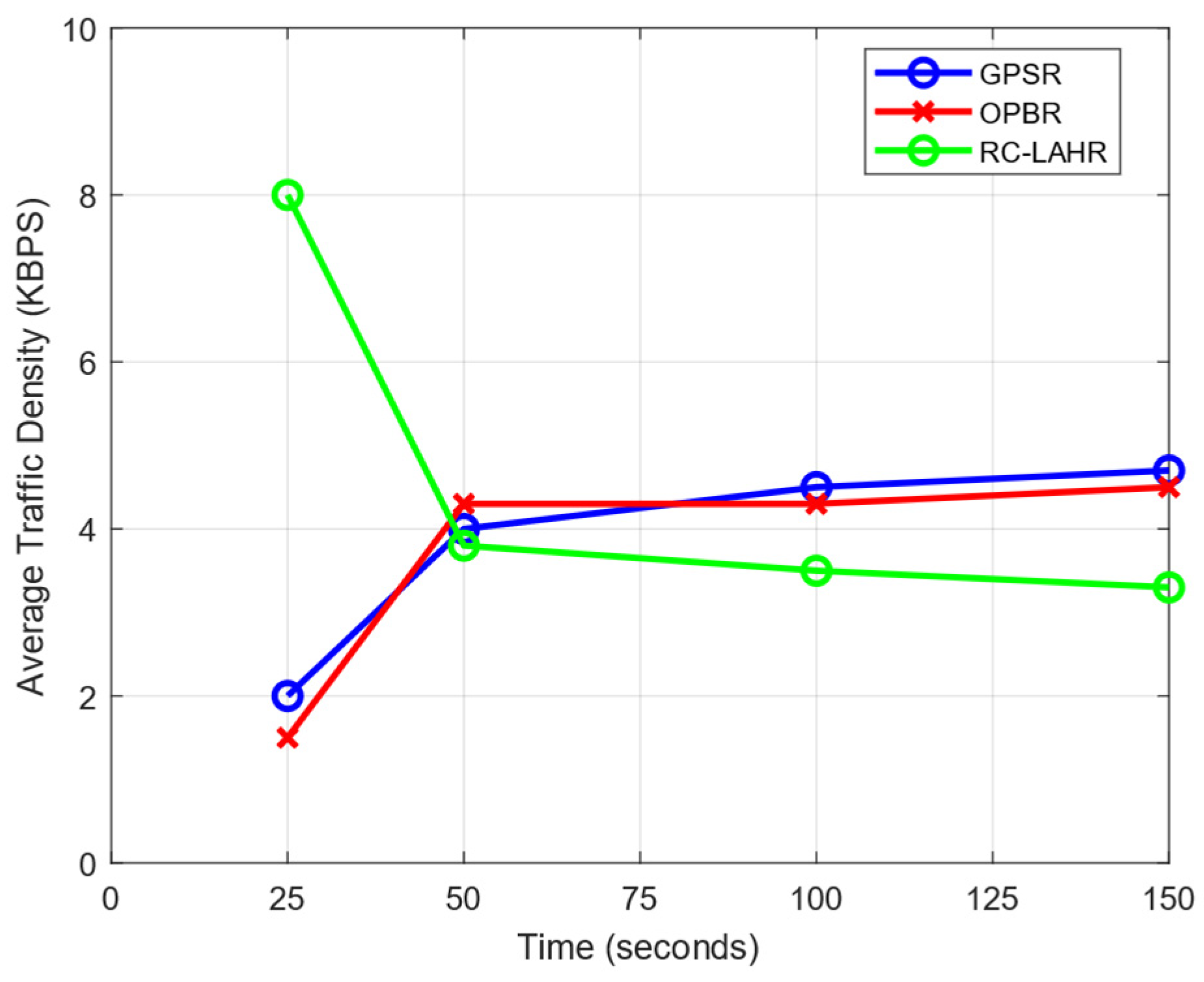
7.3. Network Traffic Analysis
7.4. Route Calculation Time Analysis
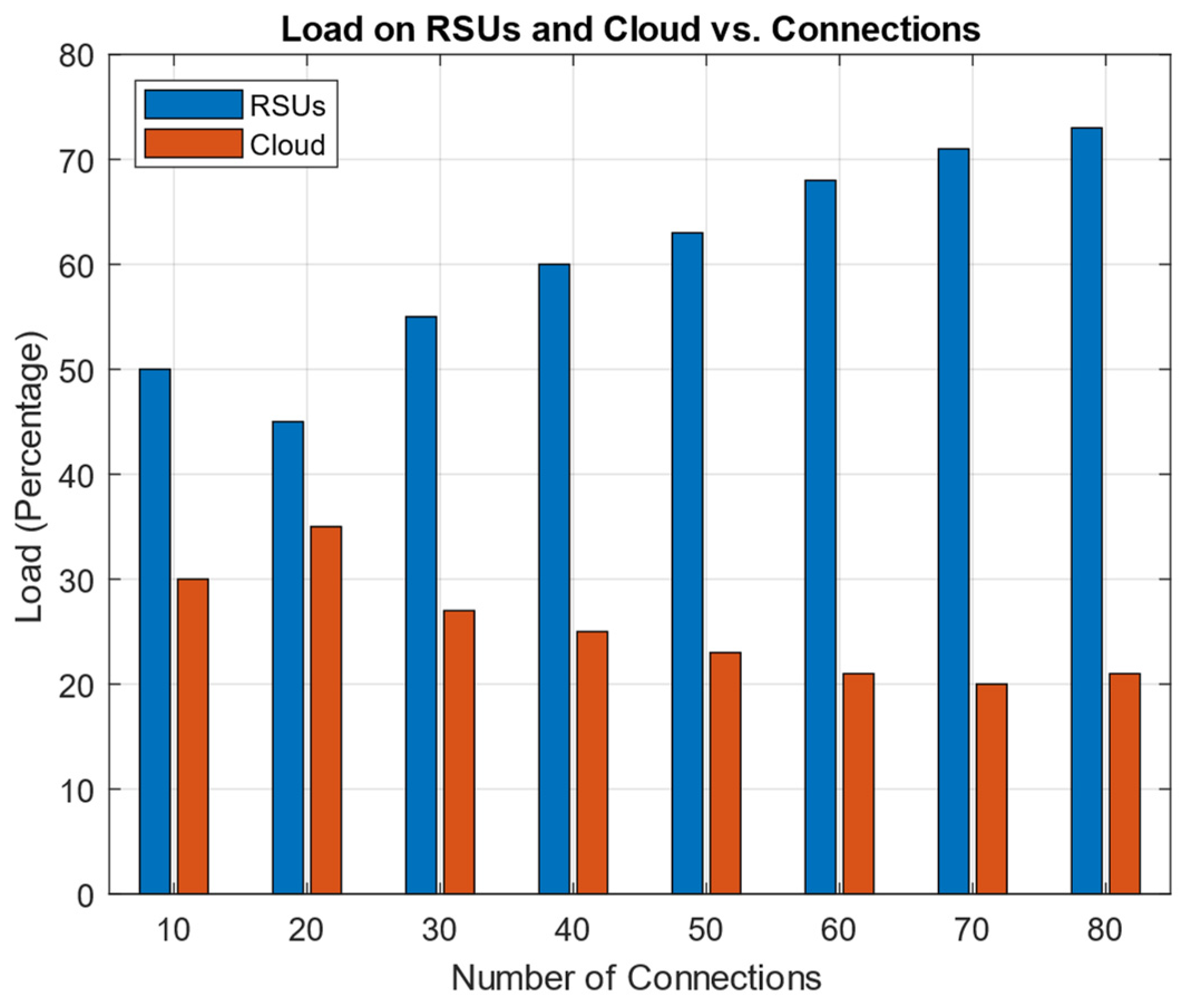
7.5. Load Analysis
7.6. Network Reliability Analysis
8. Discussion
9. Conclusions
10. Limitations and Future Scope
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| VID | Vehicular ID |
| D | Destination node |
| LTE | Long-term evolution |
| GPS | Global positioning system |
| RSU | Road-side unit |
| API | Application programming interface |
| SD-VANET | Software-defined vehicular ad hoc network |
| AI | Artificial intelligence |
| RREP | Route reply |
| RREQ | Route request |
| Overhead of RREQ | |
| Overhead of RREP | |
| Propagation delay from node to RSU | |
| Delay of RREQ | |
| Delay of RREP | |
| Route discovery delay | |
| Propagation delay from RSU to Layer 2 server | |
| Time to search a node in routing table at RSU | |
| Time to search a node in routing table at Layer1 | |
| Route discovery delay at Layer1 | |
| Route discovery delay at Layer 2 | |
| Time taken by find route algo | |
| Lavail | Link availability |
References
- Yogarayan, S.; Razak, S.F.A.; Azman, A.; Abdullah, M.F.A.; Ibrahim, S.Z.; Raman, K.J. A Review of Routing Protocols for Vehicular Ad-Hoc Networks (VANETs). In Proceedings of the 2020 8th International Conference on Information and Communication Technology (ICoICT), Yogyakarta, Indonesia, 24–26 June 2020; IEEE: New York, NY, USA, 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Belamri, F.; Boulfekhar, S.; Aissani, D. A survey on QoS routing protocols in Vehicular Ad Hoc Network (VANET). Telecommun. Syst. 2021, 78, 117–153. [Google Scholar] [CrossRef]
- Hamdi, M.M.; Al-Dosary OA, R.; Alrawi OA, S.; Mustafa, A.S.; Abood, M.S.; Noori, M.S. An overview of challenges for data dissemination and routing protocols in VANETs. In Proceedings of the 2021 3rd International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 11–13 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Al-shareeda, M.A.; Alazzawi, M.A.; Anbar, M.; Manickam, S.; Al-Ani, A.K. A Comprehensive Survey on Vehicular Ad Hoc Networks (VANETs). In Proceedings of the 2021 International Conference on Advanced Computer Applications (ACA), Maysan, Iraq, 25–26 July 2021; IEEE: New York, NY, USA, 2021; pp. 156–160. [Google Scholar] [CrossRef]
- Singh, P.K.; Nandi, S.K.; Nandi, S. A tutorial survey on vehicular communication state of the art, and future research directions. Veh. Commun. 2019, 18, 100164. [Google Scholar] [CrossRef]
- Raw, R.S.; Lobiyal, D.K.; Das, S.; Kumar, S. Analytical Evaluation of Directional-Location Aided Routing Protocol for VANETs. Wirel. Pers. Commun. 2015, 82, 1877–1891. [Google Scholar] [CrossRef]
- Raw, R.S.; Das, S. Performance Analysis of P-GEDIR Protocol for Vehicular Ad Hoc Network in Urban Traffic Environments. Wirel. Pers. Commun. 2013, 68, 65–78. [Google Scholar] [CrossRef]
- Raw, R.S.; Lobiyal, D.K. B-MFR routing protocol for vehicular ad hoc networks. In Proceedings of the 2010 International Conference on Networking and Information Technology, Manila, Philippines, 11–12 June 2010; pp. 420–423. [Google Scholar] [CrossRef]
- Rana, K.K.; Tripathi, S.; Raw, R.S. Analytical Analysis of Improved Directional Location Added Routing Protocol for VANETS. Wirel. Pers. Commun. 2018, 98, 2403–2426. [Google Scholar] [CrossRef]
- Rana, K.K.; Tripathi, S.; Raw, R.S. Inter-vehicle distance-based location aware multi-hop routing in vehicular ad-hoc network. J. Ambient Intell. Hum. Comput. 2020, 11, 5721–5733. [Google Scholar] [CrossRef]
- Zhu, H.; Liu, J.; Jin, L.; Zhang, G. Intersection-Based Unicast Routing Using Ant Colony Optimization in Software-Defined Vehicular Networks. Electronics 2023, 12, 1620. [Google Scholar] [CrossRef]
- Awang, A.; Husain, K.; Kamel, N.; Aissa, S. Routing in Vehicular Ad-hoc Networks: A Survey on Single- and Cross-Layer Design Techniques, and Perspectives. IEEE Access 2017, 5, 9497–9517. [Google Scholar] [CrossRef]
- Boussoufa-Lahlah, S.; Semchedine, F.; Bouallouche-Medjkoune, L. Geographic routing protocols for Vehicular Ad hoc NETworks (VANETs): A survey. Veh. Commun. 2018, 11, 20–31. [Google Scholar] [CrossRef]
- Rana, K.K.; Tripathi, S.; Raw, R.S. Fuzzy Logic-Based Directional Location Routing in Vehicular Ad Hoc Network. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2021, 91, 135–146. [Google Scholar] [CrossRef]
- Abbasi, I.; Shahid Khan, A. A Review of Vehicle to Vehicle Communication Protocols for VANETs in the Urban Environment. Future Int. 2018, 10, 14. [Google Scholar] [CrossRef]
- Wijesekara, P.A.D.S.N.; Sudheera, K.L.K.; Sandamali, G.G.N.; Chong, P.H.J. An Optimization Framework for Data Collection in Software Defined Vehicular Networks. Sensors 2023, 23, 1600. [Google Scholar] [CrossRef] [PubMed]
- Babaghayou, M.; Chaib, N.; Lagraa, N.; Ferrag, M.A.; Maglaras, L. A Safety-Aware Location Privacy-Preserving IoV Scheme with Road Congestion-Estimation in Mobile Edge Computing. Sensors 2023, 23, 531. [Google Scholar] [CrossRef]
- Pramitarini, Y.; Perdana, R.H.Y.; Tran, T.-N.; Shim, K.; An, B. A Hybrid Price Auction-Based Secure Routing Protocol Using Advanced Speed and Cosine Similarity-Based Clustering against Sinkhole Attack in VANETs. Sensors 2022, 22, 5811. [Google Scholar] [CrossRef]
- Teixeira, L.H.; Huszák, Á. Reinforcement Learning Environment for Advanced Vehicular Ad Hoc Networks Communication Systems. Sensors 2022, 22, 4732. [Google Scholar] [CrossRef]
- Srivastava, A.; Prakash, A.; Tripathi, R. Location based routing protocols in VANET: Issues and existing solutions. Veh. Commun. 2020, 23, 100231. [Google Scholar] [CrossRef]
- McKeown, N.; Anderson, T.; Balakrishnan, H.; Parulkar, G.; Peterson, L.; Rexford, J.; Shenker, S.; Turner, J. OpenFlow: Enabling innovation in campus networks. ACM SIGCOMM Comput. Commun. Rev. 2008, 38, 69–74. [Google Scholar] [CrossRef]
- Aliyu, A.; Abdullah, A.H.; Kaiwartya, O.; Cao, Y.; Usman, M.J.; Kumar, S.; Lobiyal, D.K.; Raw, R.S. Cloud Computing in VANETs: Architecture, Taxonomy, and Challenges. IETE Tech. Rev. 2018, 35, 523–547. [Google Scholar] [CrossRef]
- Karp, B.; Kung, H.T. GPSR: Greedy perimeter stateless routing for wireless networks. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; ACM: New York, NY, USA, 2000; pp. 243–254. [Google Scholar] [CrossRef]
- Ghaffari, A. Hybrid opportunistic and position-based routing protocol in vehicular ad hoc networks. J. Ambient Intell. Hum. Comput. 2020, 11, 1593–1603. [Google Scholar] [CrossRef]
- Ku, I.; Lu, Y.; Gerla, M.; Gomes, R.L.; Ongaro, F.; Cerqueira, E. Towards software-defined VANET: Architecture and services. In Proceedings of the 2014 13th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET), Piran, Slovenia, 2–4 June 2014; IEEE: New York, NY, USA, 2014; pp. 103–110. [Google Scholar] [CrossRef]
- Sudheera, K.L.K.; Ma, M.; Chong, P.H.J. Link Stability Based Optimized Routing Framework for Software Defined Vehicular Networks. IEEE Trans. Veh. Technol. 2019, 68, 2934–2945. [Google Scholar] [CrossRef]
- Zhu, M.; Cao, J.; Pang, D.; He, Z.; Xu, M. SDN-Based Routing for Efficient Message Propagation in VANET. In Wireless Algorithms, Systems, and Applications; Xu, K., Zhu, H., Eds.; Springer International Publishing: Cham, Switzerland, 2015; Volume 9204, pp. 788–797. [Google Scholar] [CrossRef]
- Zhu, M.; Cai, Z.; Cao, J.; Xu, M. Efficient multiple-copy routing in software-defined vehicular networks. In Proceedings of the 2015 International Conference on Information and Communications Technologies (ICT 2015), Xi’an, China, 24–26 April 2015; Institution of Engineering and Technology: London, UK, 2015; p. 32. [Google Scholar] [CrossRef]
- Liu, Y.-C.; Chen, C.; Chakraborty, S. A Software Defined Network architecture for GeoBroadcast in VANETs. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; IEEE: New York, NY, USA, 2015; pp. 6559–6564. [Google Scholar] [CrossRef]
- Ghafoor, H.; Koo, I. CR-SDVN: A Cognitive Routing Protocol for Software-Defined Vehicular Networks. IEEE Sens. J. 2018, 18, 1761–1772. [Google Scholar] [CrossRef]
- You, Z.; Cheng, G.; Wang, Y.; Chen, P.; Chen, S. Cross-Layer and SDN Based Routing Scheme for P2P Communication in Vehicular Ad-Hoc Networks. Appl. Sci. 2019, 9, 4734. [Google Scholar] [CrossRef]
- Jayashree, S.; Santhosh Kumar, S.V.N. LAPEP—Lightweight Authentication Protocol with Enhanced Privacy for effective secured communication in vehicular ad-hoc network. Wirel. Netw. 2024, 30, 151–178. [Google Scholar] [CrossRef]
- Rajkumar, Y.; Kumar, S.V.N.S. An elliptic curve cryptography based certificate-less signature aggregation scheme for efficient authentication in vehicular ad hoc networks. Wirel. Netw. 2024, 30, 335–362. [Google Scholar] [CrossRef]
- Dinesh, K.; Santhosh Kumar, S.V.N. Energy-efficient trust-aware secured neuro-fuzzy clustering with sparrow search optimization in wireless sensor network. Int. J. Inf. Secur. 2023, 23, 199–223. [Google Scholar] [CrossRef]
- Nandhini, U.; Kumar, S.V.N.S. A comprehensive survey on fuzzy-based intelligent intrusion detection system for internet of things. Int. J. Inf. Comput. Secur. 2023, 21, 383–398. [Google Scholar] [CrossRef]
- Santhosh Kumar, S.V.N.; Palanichamy, Y.; Selvi, M.; Ganapathy, S.; Kannan, A.; Perumal, S.P. Energy efficient secured K means based unequal fuzzy clustering algorithm for efficient reprogramming in wireless sensor networks. Wirel. Netw. 2021, 27, 3873–3894. [Google Scholar] [CrossRef]
- Thangaramya, K.; Kulothungan, K.; Indira Gandhi, S.; Selvi, M.; Santhosh Kumar, S.V.N.; Arputharaj, K. Intelligent fuzzy rule-based approach with outlier detection for secured routing in WSN. Soft Comput. 2020, 24, 16483–16497. [Google Scholar] [CrossRef]
- Selvi, M.; Santhosh Kumar, S.V.N.; Ganapathy, S.; Ayyanar, A.; Khanna Nehemiah, H.; Kannan, A. An Energy Efficient Clustered Gravitational and Fuzzy Based Routing Algorithm in WSNs. Wirel. Pers. Commun. 2021, 116, 61–90. [Google Scholar] [CrossRef]
- Kumar, S.; Maurya, V.; Gupta, R. A Distributed Load Balancing Technique for Multitenant Edge Servers With Bottleneck Resources. In IEEE Transactions on Reliability; IEEE: New York, NY, USA, 2023; pp. 1–13. [Google Scholar] [CrossRef]
- Alsaffar, M.; Hamad, A.A.; Alshammari, A.; Alshammari, G.; Almurayziq, T.S.; Mohammed, M.S.; Enbeyle, W. Network Management System for IoT Based on Dynamic Systems. Comput. Math. Methods Med. 2021, 2021, 9102095. [Google Scholar] [CrossRef]
- Thivagar, M.L.; Al-Obeidi, A.S.; Tamilarasan, B.; Hamad, A.A. Dynamic analysis and projective synchronization of a new 4D system. In IoT and Analytics for Sensor Networks, Proceedings of the ICWSNUCA 2021, Hyderabad, India, 26–27 February 2021; Springer: Singapore, 2021; pp. 323–332. [Google Scholar]
- Jasim, F.T.; Karthick, M. Artificial Intelligence Innovation and Human Resource Recruitment. Tamjeed J. Healthc. Eng. Sci. Technol. 2023, 1, 20–29. [Google Scholar] [CrossRef]
- Al-Rweis, A.; Zakaraya, Z.; Al-Omari, L.; Abdul-Aziz, K. Impact of smoking on Galectin-3 and GDF-15 among pregnant women. Tamjeed J. Healthc. Eng. Sci. Technol. 2024, 2, 1–12. [Google Scholar] [CrossRef]
- Kadhim, N.M.; Mohammed, H.A.; Radhawi, S.N.; Jabur, A.M.; Gottraan, R.B.; Abdulridha, M.M.; Kadhim, W.M.; Mohammed, Z.Q. Investigation of the next generation science standards including in the science book according to E-learn: Analytical study. Tamjeed J. Healthc. Eng. Sci. Technol. 2023, 1, 30–35. [Google Scholar] [CrossRef]
- IEEE Standard 802.11ac. Available online: https://standards.ieee.org/standard/802_11ac-2013.html/ (accessed on 29 March 2023).
- Shalimov, A.; Zuikov, D.; Zimarina, D.; Pashkov, V.; Smeliansky, R. Advanced study of SDN/OpenFlow controllers. In Proceedings of the 9th Central & Eastern European Software Engineering Conference in Russia, Moscow Russia, 24–25 October 2013; ACM: New York, NY, USA, 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Fontes, R.R.; Afzal, S.; Brito, S.H.B.; Santos, M.A.S.; Rothenberg, C.E. Mininet-WiFi: Emulating software-defined wireless networks. In Proceedings of the 2015 11th International Conference on Network and Service Management (CNSM), Barcelona, Spain, 9–13 November 2015; IEEE: New York, NY, USA, 2015; pp. 384–389. [Google Scholar] [CrossRef]
- Krajzewicz, D. Traffic Simulation with SUMO—Simulation of Urban Mobility. In Fundamentals of Traffic Simulation; Barceló, J., Ed.; Springer: New York, NY, USA, 2010; Volume 145, pp. 269–293. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Setting Value |
|---|---|
| Simulated environment size | 3800 m × 3200 m |
| MAC protocol | IEEE 802.11p |
| Transmission range | 260–320 m |
| Transmission rate range | 1–12 Mbps |
| Controller | OpenFlow |
| Speed range | 20–80 km/h |
| Hello packet cycle | 50 ms |
| Simulation time | 200 s |
| Number of nodes | 50 nodes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, M.; Raw, R.S. RC-LAHR: Road-Side-Unit-Assisted Cloud-Based Location-Aware Hybrid Routing for Software-Defined Vehicular Ad Hoc Networks. Sensors 2024, 24, 1045. https://doi.org/10.3390/s24041045
Kumar M, Raw RS. RC-LAHR: Road-Side-Unit-Assisted Cloud-Based Location-Aware Hybrid Routing for Software-Defined Vehicular Ad Hoc Networks. Sensors. 2024; 24(4):1045. https://doi.org/10.3390/s24041045
Chicago/Turabian StyleKumar, Manish, and Ram Shringar Raw. 2024. "RC-LAHR: Road-Side-Unit-Assisted Cloud-Based Location-Aware Hybrid Routing for Software-Defined Vehicular Ad Hoc Networks" Sensors 24, no. 4: 1045. https://doi.org/10.3390/s24041045
APA StyleKumar, M., & Raw, R. S. (2024). RC-LAHR: Road-Side-Unit-Assisted Cloud-Based Location-Aware Hybrid Routing for Software-Defined Vehicular Ad Hoc Networks. Sensors, 24(4), 1045. https://doi.org/10.3390/s24041045