
Research on Time Series Monitoring of Surface Deformation in Tongliao Urban Area Based on SBAS-PS-DS-InSAR

 , , and
, , and
Abstract
:1. Introduction
2. Study Area and Methods
2.1. Overview of the Study Area
2.2. Data
2.3. Time Series InSAR Methods
2.3.1. PS-InSAR Method
2.3.2. DS-InSAR Method
2.3.3. SBAS-InSAR Method
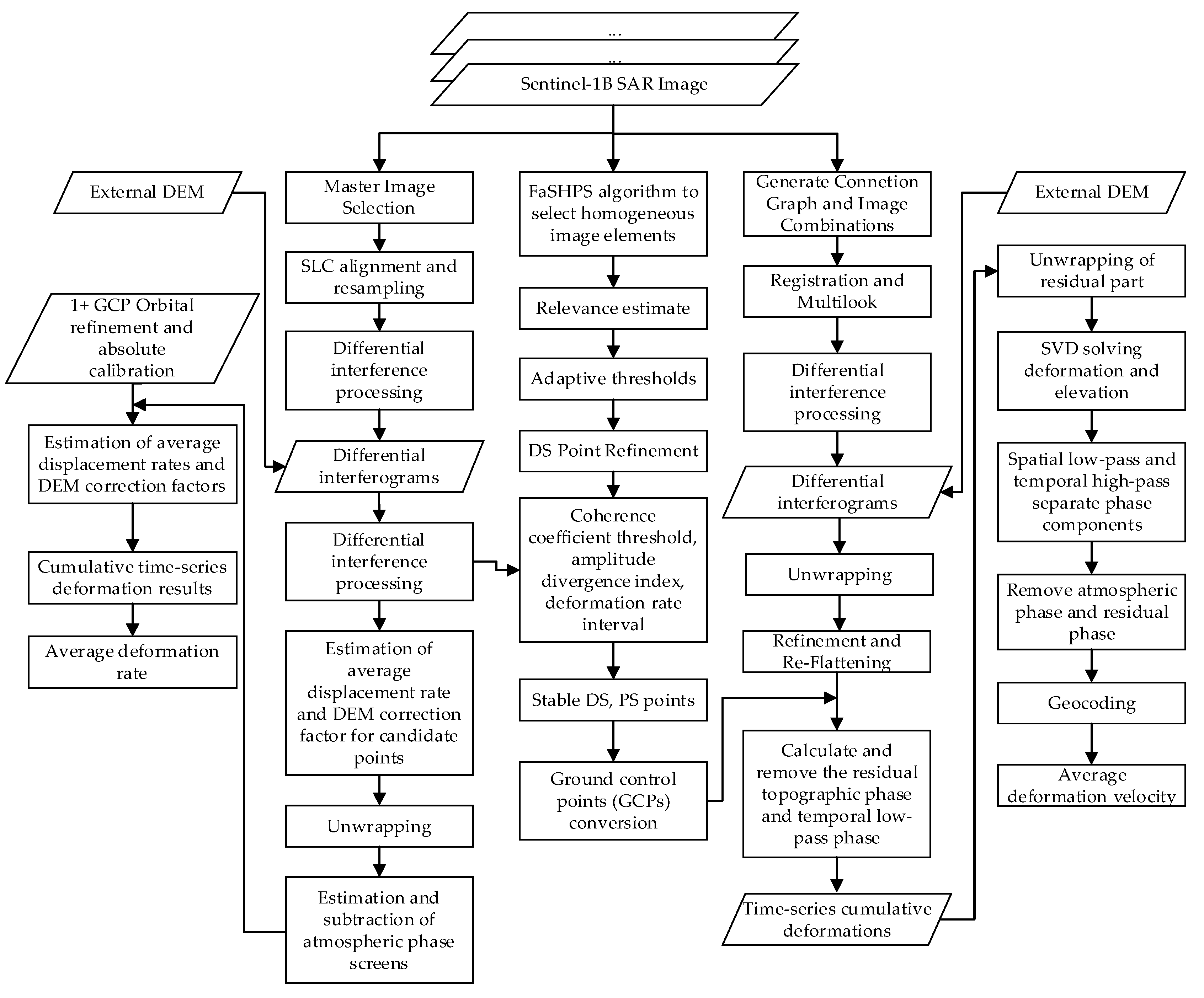
2.3.4. SBAS-PS-DS-InSAR Method
- (1)
- Data pre-processing. Sentinel-1B satellite SLC image data, DEM data, and precision orbit data of the study area were downloaded. Data clipping and baseline data estimates were made according to the extent and characteristics of the study area.
- (2)
- PS-InSAR and DS-InSAR processing were performed on the image data processed in step (1) to identify PS points and DS points waiting for screening.
- (3)
- PS-DS four-threshold method (coherence coefficient threshold, FaSHPS adaptive threshold, amplitude deviation index threshold, and deformation velocity interval) processing was used to obtain stable and eligible DS and PS points as GCPs points.
- (4)
- SBAS-PS-DS-InSAR processing. The GCPs selected using the PS-DS four-threshold method were used in the orbit refinement and re-flattening steps of the SBAS-InSAR processing, and then the time series deformation results were obtained by deformation inversion.
- (5)
- Comparison verification and analysis. The deformation results of SBAS-InSAR and SBAS-PS-DS-InSAR monitoring were verified and analysed in comparison with the GPS monitoring results to provide a reference for urban surface deformation disaster prevention and municipal planning.
2.3.5. Ground Control Point Screening
- High coherence, good de-entanglement results, and stable regions;
- Areas without deformation fringes and away from deformation;
- Regions without residual topographic streaks;
- No phase jumps, as they cannot be located in isolated phases;
- Uniformly distributed in the image.
- (1)
- Coherence factor method
- (2)
- FaSHPS adaptive thresholding method
- (3)
- Amplitude dispersion index method
2.3.6. SBAS-PS-DS-InSAR Processing
2.4. GPS Measurements
3. Results and Analysis
4. Discussion
5. Conclusions
- (1)
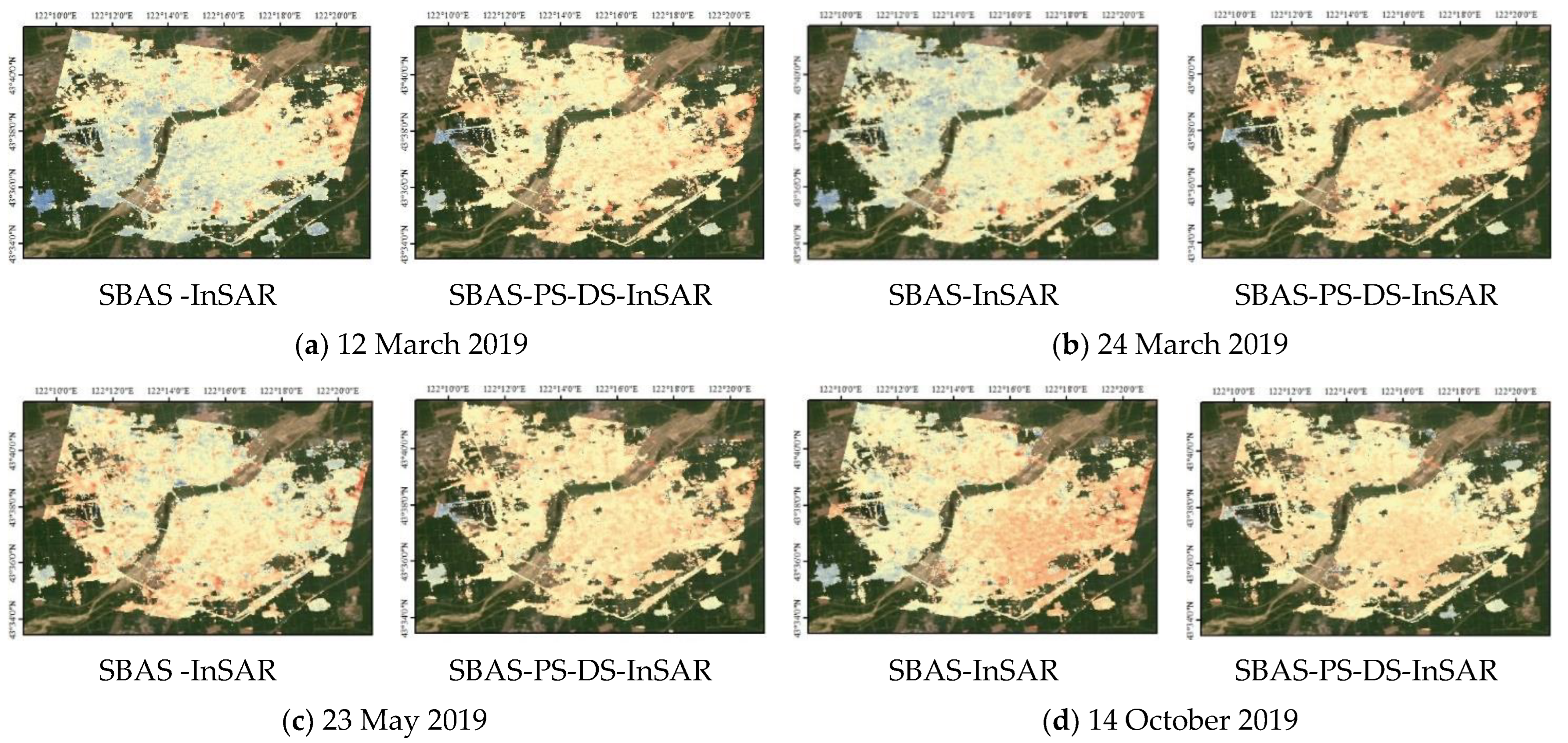
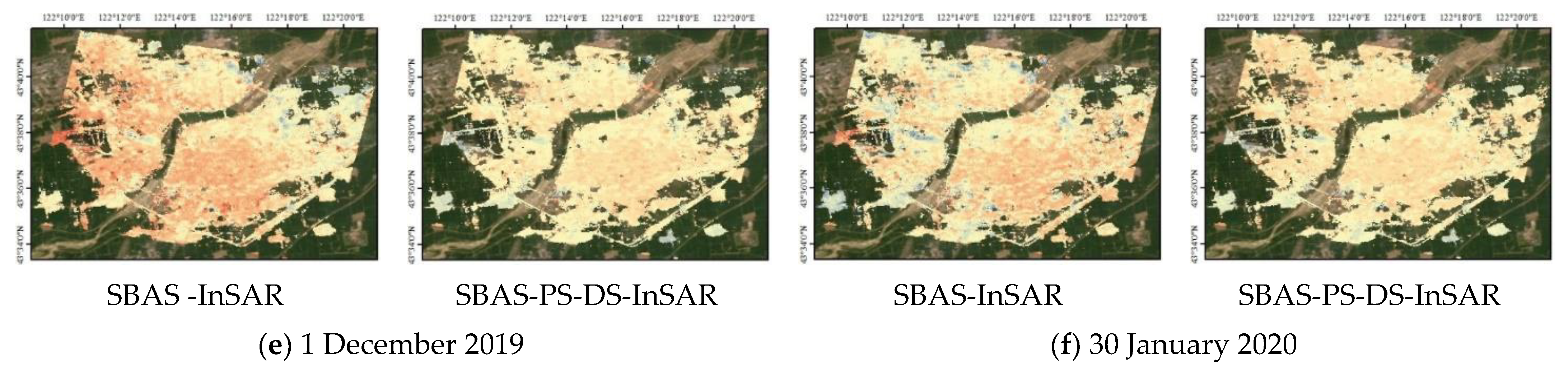
- The SBAS-PS-DS-InSAR method is able to monitor the surface deformation of urban areas effectively in real time, and accurately monitors the location, range, and spatial–temporal distribution of settlements in urban areas. The monitored spatial–temporal deformation is basically the same as that of the GPS method, with basically the same trend.
- (2)
- Comparison between the SBAS-InSAR method and the SBAS-PS-DS-InSAR method reveals that the SBAS-PS-DS-InSAR method can better monitor the surface deformation in urban areas and can effectively obtain the range and distribution of deformation in urban areas. The deformation errors of these two methods are smaller in areas with smaller deformation variables, but the deformation errors of the SBAS-PS-DS-InSAR method are always smaller than those of the SBAS-InSAR method. The Pearson correlation coefficients between the time-series settlement results monitored by the SBAS-PS-DS-InSAR method and the GPS results are always closer than those of the SBAS-InSAR method. The correlation coefficients are always closer than the Pearson correlation coefficients of the SBAS-InSAR method, and the GPS results are always closer to 1.
- (3)
- The surface deformation in urban areas monitored by the SBAS-PS-DS-InSAR method ameliorates the uncertainties and errors that exist when manually selecting the GCPS points manually. The method retains the advantages of PS-InSAR in urban-area applications and the characteristics of DS-InSAR in non-man-made building areas with short vegetation, while also making use of the facet-scale monitoring of SBAS-InSAR to make up the shortcomings of the limited monitoring ranges of PS-InSAR and DS-InSAR.
- (4)
- The SBAS-PS-DS-InSAR method has shown good reliability and accuracy in practical applications, and can effectively monitor the surface deformation of urban areas in time sequences. It provides comprehensive deformation information and references for comprehensive urban deformation management, urban municipal construction planning, and early warning for disasters, while realising effective urban deformation monitoring.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Teng, C.; Wang, L.; Chuang, J. Urban surface deformation monitoring and prediction by integrating SBAS-InSAR and Elman neural network. Surv. Rev. 2022, 56, 18–31. [Google Scholar] [CrossRef]
- Hu, B.; Chen, B.; Na, J.; Yao, J.; Zhang, Z. Urban Surface Deformation Management: Assessing Dangerous Subsidence Areas through Regional Surface Deformation, Natural Factors, and Human Activities. Sustainability 2022, 14, 10487. [Google Scholar] [CrossRef]
- Tao, Z.; Geng, Q.; Zhu, C.; He, M.; Cai, H.; Pang, S.; Meng, X. The mechanical mechanisms of large-scale toppling failure for counter-inclined rock slopes. J. Geophys. Eng. 2019, 16, 541–558. [Google Scholar] [CrossRef]
- Dong, M.; Zhang, F.; Lv, J.; Hu, M.; Li, Z. Study on deformation and failure law of soft-hard rock interbedding toppling slope base on similar test. Bull. Eng. Geol. Environ. 2020, 79, 4625–4637. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, C.; He, M.; Dong, M.; Zhang, G.; Zhang, F. Failure Mechanism and Long Short-Term Memory Neural Network Model for Landslide Risk Prediction. Remote Sens. 2022, 14, 166. [Google Scholar] [CrossRef]
- Liao, M.; Wang, R.; Yang, M.; Wang, N.; Qin, X. Techniques and applications of spaceborne time-series InSAR in urban dynamic monitoring. J. Radars 2020, 9, 409–424. [Google Scholar] [CrossRef]
- He, Y.; Chen, Y.; Wang, W.; Yan, H.; Zhang, L.; Liu, T. TS-InSAR analysis for monitoring ground deformation in Lanzhou New District, the loess Plateau of China, from 2017 to 2019. Adv. Space Res. 2021, 67, 1267–1283. [Google Scholar] [CrossRef]
- Kong, W.; Liu, S.; Xu, M.; Yasir, M.; Wang, D.; Liu, W. Lightweight algorithm for multi-scale ship detection based on high-resolution SAR images. Int. J. Remote Sens. 2023, 4, 1390–1415. [Google Scholar] [CrossRef]
- Liu, C.; Li, Z.; Huang, L.; Zhang, P.; Wu, Z.; Zhou, J.; Tang, Z.; Li, G. Identifying Wet and Dry Snow with Dual-Polarized C-Band SAR Data Based on Markov Random Field Model. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Wang, X.; Yang, Y.; Xia, Y.; Chen, S.; She, Y. Integrating SAR and Geographic Information Data Revealing Land Subsidence and Geological Risks of Shanghai City. Appl. Sci. 2023, 13, 12091. [Google Scholar] [CrossRef]
- Li, F.; Goldstein, R. Studies of multibaseline spaceborne interferometric synthetic aperture radars. IEEE Trans. Geosci. Remote Sens. 1990, 28, 88–97. [Google Scholar] [CrossRef]
- Gabriel, A.; Goldstein, R.; Zebker, H. Mapping small elevation changes over large areas: Differential radar interferometry. J. Geophys. Res. Solid Earth 1989, 94, 9183–9191. [Google Scholar] [CrossRef]
- Ding, W.; Chen, Z.; Xu, B.; Feng, Z. Long time-series of surface deformation monitoring and cause analysis in Baiyun district, Guangzhou base on SBAS-InSAR technology. Bull. Surv. Mapp. 2023, 4, 167–171. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Nonlinear subsidence rate estimation using permanent scatterers in differential SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2202–2212. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Mora, O.; Mallorqui, J.J.; Broquetas, A. Linear and nonlinear terrain deformation maps from a reduced set of interferometric SAR images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2243–2253. [Google Scholar] [CrossRef]
- Hooper, A. A multi-temporal InSAR method incorporating both persistent scatterer and small baseline approaches. Geophys. Res. Lett. 2008, 35, 96–106. [Google Scholar] [CrossRef]
- Mora, O.; Lanari, R.; Mallorqui, J.; Berardino, P.; Sansosti, E. A new algorithm for monitoring localized deformation phenomena based on small baseline differential SAR interferograms. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002. [Google Scholar] [CrossRef]
- Casu, F.; Manzo, M.; Lanari, R. A quantitative assessment of the SBAS algorithm performance for surface deformation retrieval from DInSAR data. Remote Sens. Environ. 2006, 102, 195–210. [Google Scholar] [CrossRef]
- Wu, Q.; Jia, C.; Chen, S.; Li, H. SBAS-InSAR Based Deformation Detection of Urban Land, Created from Mega-Scale Mountain Excavating and Valley Filling in the Loess Plateau: The Case Study of Yan’an City. Remote Sens. 2019, 11, 1673. [Google Scholar] [CrossRef]
- Wang, R.; Feng, Y.; Tong, X.; Li, P.; Wang, J.; Tang, P.; Tang, X.; Xi, M.; Zhou, Y. Large-Scale Surface Deformation Monitoring Using SBAS-InSAR and Intelligent Prediction in Typical Cities of Yangtze River Delta. Remote Sens. 2023, 15, 4942. [Google Scholar] [CrossRef]
- Du, Q.; Li, G.; Chen, D.; Zhou, Y.; Qi, S.; Wu, G.; Chai, M.; Tang, L.; Jia, H.; Peng, W. SBAS-InSAR-Based Analysis of Surface Deformation in the Eastern Tianshan Mountains, China. Front. Earth Sci. 2021, 9, 729454. [Google Scholar] [CrossRef]
- Wang, F.; Tao, Q.; Liu, G.; Chen, Y.; Han, Y.; Guo, Z.; Liu, X. Monitoring of surface deformation in mining area integrating SBAS InSAR and Logistic Function. Environ. Monit. Assess. 2023, 195, 1493. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Yang, K.; Hou, Z.; Wang, S.; Ding, X. Research on Time Series InSAR Monitoring Method for Multiple Types of Surface Deformation in Mining Area. Nat. Hazards 2022, 114, 2479–2508. [Google Scholar] [CrossRef]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A New Algorithm for Processing Interferometric Data-Stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Zhong, Y.; Dong, S.; Hu, H. Land Subsidence Monitoring and Analysis in Changzhou Based on Time Series lnterferometry Methods. Geol. J. China Univ. 2019, 25, 131–143. [Google Scholar] [CrossRef]
- Wang, Y.; Luo, X.; Yu, B. Monitoring ground subsidence in Zhengzhou with InSAR. Sci. Surv. Mapp. 2019, 44, 100–106. [Google Scholar]
- Wei, X. Research on surface deformation monitoring of Hefei area based on SBAS. Sci. Surv. Mapp. 2018, 43, 67–71. [Google Scholar] [CrossRef]
- Zhou, L.; Guo, J.; Li, X.; Hu, J. Monitoring and Analyzing on Ground Settlement in Beijing Area Based on SBAS-InSAR. J. Geod. Geodyn. 2016, 36, 793–797. [Google Scholar] [CrossRef]
- Wang, L.; Lian, Z.; Liu, J. Urban Surface Subsidence Monitoring Based on SBAS-InSAR and Sentinel-1A. Geospat. Inf. 2022, 20, 59–64. [Google Scholar] [CrossRef]
- Wei, L.; Feng, Q.; Mao, Y.; Liu, S. Deformation Monitoring of High Steep Slope in Open-Pit Mine with Multi-Orbit SBAS. J. Northeast. Univ. 2020, 41, 1445–1451. [Google Scholar] [CrossRef]
- Yang, W.; He, Y.; Zhang, L.; Wang, W.; Chen, Y.; Chen, Y. InSAR monitoring of 3D surface deformation in Jinchuan mining area, Gansu Province. Remote Sens. Nat. Resour. 2022, 34, 177–188. [Google Scholar]
- Chen, Y.; Dong, X.; Qi, Y.; Huang, P.; Sun, W.; Xu, W.; Tan, W.; Li, X.; Liu, X. Integration of DInSAR-PS-Stacking and SBAS-PS-InSAR Methods to Monitor Mining-Related Surface Subsidence. Remote Sens. 2023, 15, 2691. [Google Scholar] [CrossRef]
- Pan, J.; Deng, F.; Xu, Z.; Xiang, Q.; Tu, W.; Fu, Z. Time series InSAR surface deformation monitoring in extremely difficult area based on track refining contro points selection. Chin. J. Geol. Hazard Control. 2021, 32, 98–104. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, Y. Determining Suitable Spaceborne SAR Observations and Ground Control Points for Surface Deformation Study in Rugged Terrain with InSAR Technique. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 11324–11334. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, W.; Geng, S.; Miao, J.; Shen, R. Integrating PS-InSAR and SBAS-InSAR for mining surface settlement monitoring. J. Mines Met. Fuels 2021, 69, 310. [Google Scholar]
- Correa-Muñoz, N.; Murillo-Feo, C. Detection of landslides with SAR polarymetry: Case study of south-eastern Colombia. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2018, XLII-3/W4, 177–184. [Google Scholar] [CrossRef]
- Wu, H.; Zheng, X.; Fan, H.; Tian, Z. Deformation Monitoring of Tailings Reservoir Based on Polarimetric Time Series InSAR: Example of Kafang Tailings Reservoir, China. Remote Sens. 2022, 14, 3655. [Google Scholar] [CrossRef]
- Jiang, M.; Ding, X.; Hanssen, R.; Malhotra, R.; Chang, L. Fast Statistically Homogeneous Pixel Selection for Covariance Matrix Estimation for Multitemporal InSAR. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1213–1224. [Google Scholar] [CrossRef]
- Woodhouse Iain, H. Polarimetric radar imaging: From basics to applications by Jong-Sen Lee and Eric Pottier. Int. J. Remote Sens. 2012, 33, 333–334. [Google Scholar] [CrossRef]
- Cao, J.; Zheng, X.; Fan, H.; Li, G.; Huang, C. Surface Deformation Monitoring in the Yellow River Delta by Using DS-InSAR Technique. J. Geod. Geodyn. 2022, 42, 1177–1183. [Google Scholar] [CrossRef]
- Cao, N.; Lee, H.; Jung, H. A Phase-Decomposition-Based PSInSAR Processing Method. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1074–1090. [Google Scholar] [CrossRef]
- Cao, F.; Liao, W. Application of SBAS technology in ground subsidence monitoring of mining area. Bull. Surv. Mapp. 2021, 3, 156–158, 163. [Google Scholar] [CrossRef]
- Hu, B.; Wang, H.; Jia, L. Automatic detection of permanent scatterers in PSInSAR. Sci. Surv. Mapp. 2011, 36, 50–52. [Google Scholar] [CrossRef]
- Yang, Y.; Jia, S.; Wang, H.; Zhou, Y. Analysis on impact of land subsidence on planned new cities in Beijing. City Plan. Rev. 2013, 11, 67–71. [Google Scholar]
- Jia, H.; Liu, L. A technical review on persistent scatterer interferometry. J. Mod. Transp. 2016, 24, 153–158. [Google Scholar] [CrossRef]
- Song, S.; Zhao, M.; Zhu, C.; Wang, F.; Cao, C.; Li, H.; Ma, M. Identification of the Potential Critical Slip Surface for Fractured Rock Slope Using the Floyd Algorithm. Remote Sens. 2022, 14, 1284. [Google Scholar] [CrossRef]
- Li, B. Research on the application of GPS-RTK technology in figure root control survey. Sci. Technol. Innov. Her. 2010, 26, 81–83. [Google Scholar] [CrossRef]
- Wu, Y. Application Analysis of GPS-RTK Technology in Mine Mapping. Min. Equip. 2022, 196–198. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Flight direction | Descending |
| Beam mode | IW |
| Polarisation | VH |
| Wave band | C |
| Wavelength/cm | 5.6 |
| Number of images | 45 |
| Monitored period | 16 February 2019–14 December 2021 |
| No | Image Data | Orbit | No | Image Data | Orbit | No | Image Data | Orbit |
|---|---|---|---|---|---|---|---|---|
| 1 | 16 February 2019 | 014977 | 16 | 6 January 2020 | 019702 | 31 | 19 December 2020 | 024777 |
| 2 | 28 February 2019 | 015152 | 17 | 18 January 2020 | 019877 | 32 | 5 February 2021 | 025477 |
| 3 | 12 March 2019 | 015327 | 18 | 30 January 2020 | 020052 | 33 | 17 February 2021 | 025652 |
| 4 | 24 March 2019 | 015502 | 19 | 11 February 2020 | 020052 | 34 | 1 March 2021 | 025827 |
| 5 | 5 April 2019 | 015677 | 20 | 23 February 2020 | 020402 | 35 | 13 March 2021 | 026002 |
| 6 | 29 April 2019 | 016027 | 21 | 6 March 2020 | 020577 | 36 | 6 April 2021 | 026352 |
| 7 | 23 May 2019 | 016377 | 22 | 18 March 2020 | 020752 | 37 | 18 April 2021 | 026527 |
| 8 | 4 June 2019 | 016552 | 23 | 30 March 2020 | 020927 | 38 | 30 April 2021 | 026702 |
| 9 | 14 October 2019 | 018477 | 24 | 11 April 2020 | 021102 | 39 | 12 May 2021 | 026877 |
| 10 | 26 October 2019 | 018652 | 25 | 23 April 2020 | 021277 | 40 | 24 May 2021 | 027052 |
| 11 | 7 November 2019 | 018827 | 26 | 5 May 2020 | 021452 | 41 | 3 October 2021 | 028977 |
| 12 | 19 November 2019 | 019002 | 27 | 17 May 2020 | 021627 | 42 | 15 October 2021 | 029152 |
| 13 | 1 December 2019 | 019177 | 28 | 29 May 2020 | 021802 | 43 | 27 October 2021 | 029327 |
| 14 | 13 December 2019 | 019352 | 29 | 13 November 2020 | 024252 | 44 | 2 December 2021 | 029852 |
| 15 | 25 December 2019 | 019527 | 30 | 25 November 2020 | 024427 | 45 | 14 December 2021 | 030027 |
| Monitoring Methodology | Areas | Pearson Correlation Coefficient | MAE/mm | RMSE/mm |
|---|---|---|---|---|
| SBAS-InSAR method and SBAS-PS-DS-InSAR method | A | 0.87989 | 11.9061 | 14.8345 |
| B | 0.82154 | 14.9627 | 16.4799 | |
| C | 0.98963 | 6.4014 | 7.6183 | |
| D | 0.98686 | 3.1196 | 4.2927 | |
| E | 0.95945 | 14.3706 | 19.0377 | |
| F | 0.66166 | 4.9479 | 6.6369 | |
| SBAS-InSAR method and GPS method | A | 0.93689 | 17.6760 | 19.4243 |
| B | 0.86594 | 16.5225 | 19.9504 | |
| C | 0.96792 | 16.8147 | 19.3812 | |
| D | 0.95648 | 14.3293 | 16.3959 | |
| E | 0.95100 | 8.1740 | 12.137 | |
| F | 0.70984 | 7.3222 | 8.6226 | |
| SBAS-PS-DS-InSAR method and GPS method | A | 0.97034 | 7.1135 | 8.3343 |
| B | 0.96693 | 11.5156 | 12.7019 | |
| C | 0.97767 | 13.7625 | 14.8004 | |
| D | 0.98202 | 12.4318 | 13.6862 | |
| E | 0.98711 | 7.7585 | 9.1195 | |
| F | 0.81091 | 3.9272 | 4.7491 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Ding, C.; Huang, P.; Yin, B.; Tan, W.; Qi, Y.; Xu, W.; Du, S. Research on Time Series Monitoring of Surface Deformation in Tongliao Urban Area Based on SBAS-PS-DS-InSAR. Sensors 2024, 24, 1169. https://doi.org/10.3390/s24041169
Chen Y, Ding C, Huang P, Yin B, Tan W, Qi Y, Xu W, Du S. Research on Time Series Monitoring of Surface Deformation in Tongliao Urban Area Based on SBAS-PS-DS-InSAR. Sensors. 2024; 24(4):1169. https://doi.org/10.3390/s24041169
Chicago/Turabian StyleChen, Yuejuan, Cong Ding, Pingping Huang, Bo Yin, Weixian Tan, Yaolong Qi, Wei Xu, and Siai Du. 2024. "Research on Time Series Monitoring of Surface Deformation in Tongliao Urban Area Based on SBAS-PS-DS-InSAR" Sensors 24, no. 4: 1169. https://doi.org/10.3390/s24041169