
A Hybrid Convolutional and Recurrent Neural Network for Multi-Sensor Pile Damage Detection with Time Series



Abstract
1. Introduction
2. Multi-Sensor Pile Damage Detection (MSPDD) Method
2.1. Operation Steps
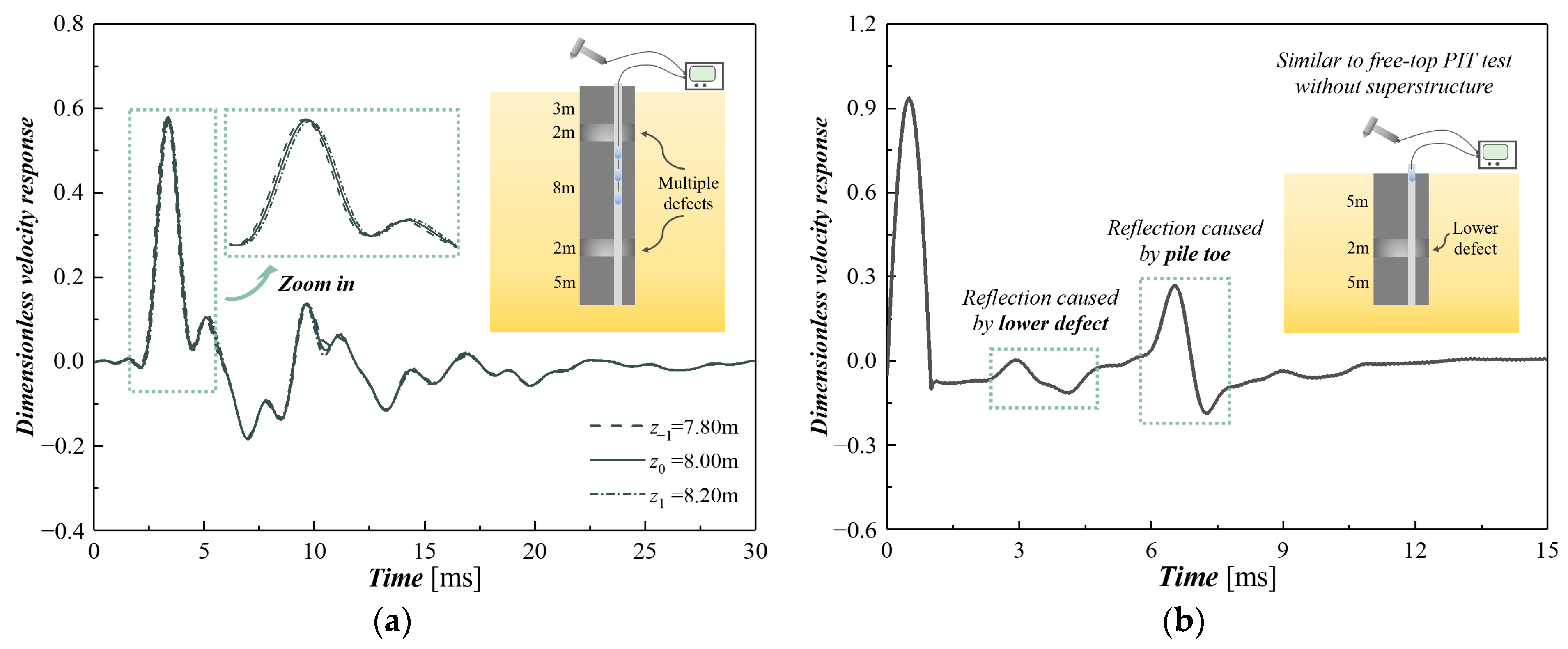
2.2. Signal Post-Processing
3. Multi-Task Learning Framework for Time-Series MSPDD Results
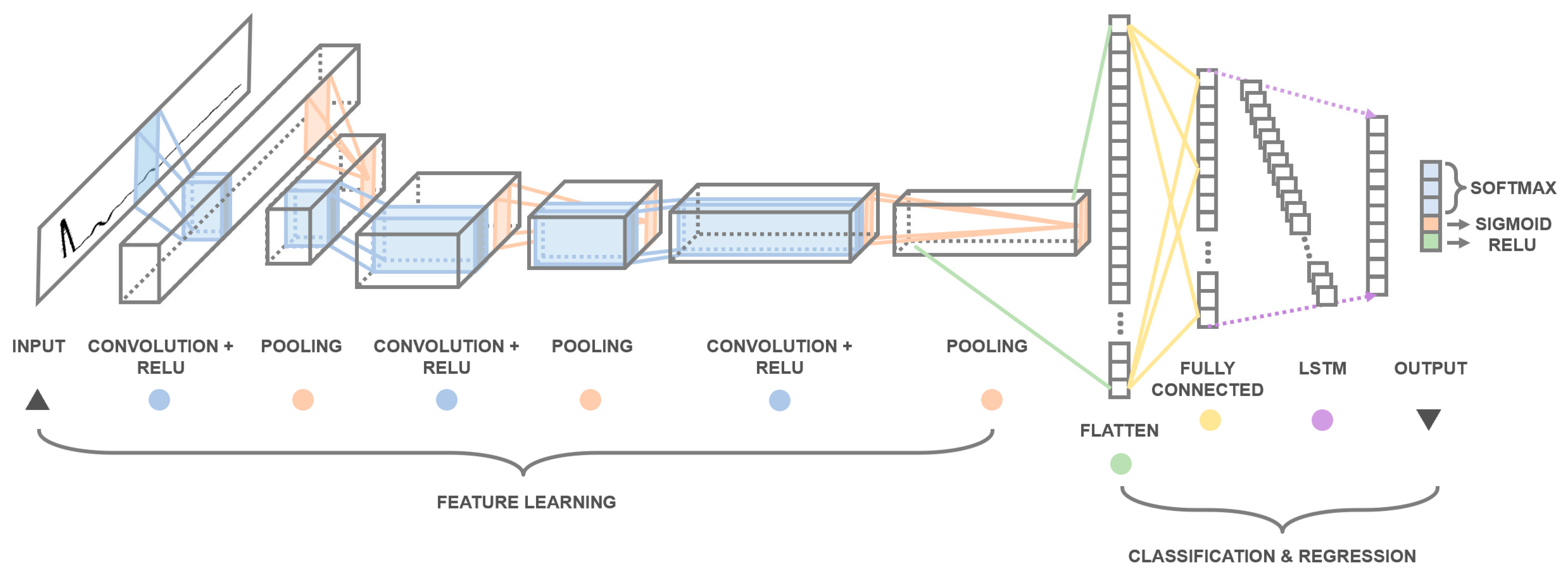
3.1. Proposed Hybrid Convolutional and Recurrent Neural Network Framework
- (1)
- One-dimensional convolutional neural network (CNN)
- (2)
- Long short-term memory (LSTM) network
3.2. Multi-Task Learning and Loss Function
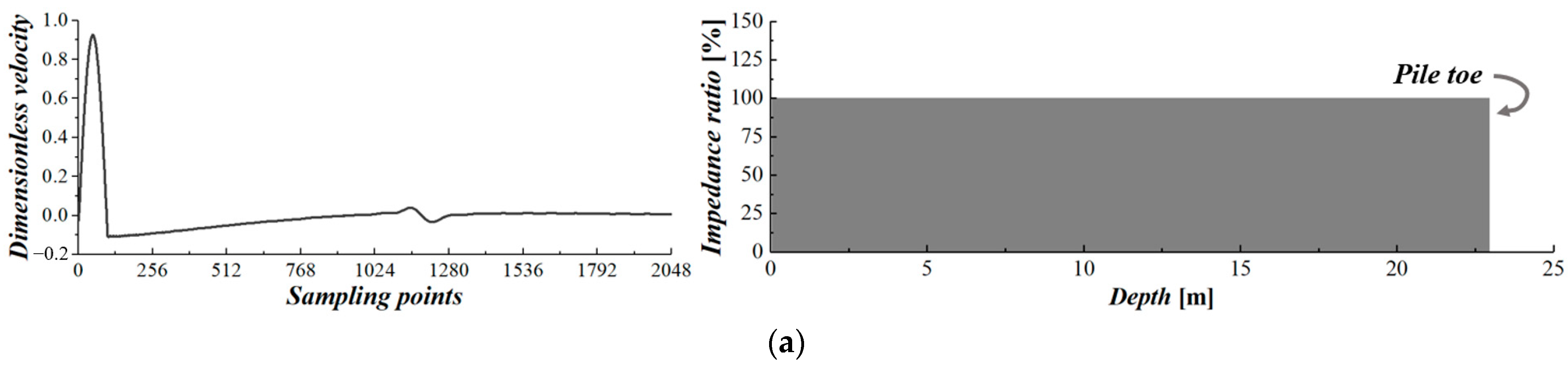
4. Sample Generation Based on Analytical Models
5. Results and Discussion
6. Conclusions
- (1)
- A novel multi-sensor pile damage detection (MSPDD) method is proposed in this paper to evaluate the integrity of onshore and offshore pile foundations, while the traveling wave decomposition (TWD) theory is utilized to implement the post-processing for a series of signals collected by multiple sensors. The reconstructed MSPDD results are then utilized to conduct automatic pile damage detection with multiple tasks.
- (2)
- A hybrid one-dimensional (1D) convolutional and recurrent neural network is developed for the time-series MSPDD results, and a loss function is proposed to clarify the sequence between multiple tasks and therefore facilitate multi-task learning. Then, an analytical solution-based sample set is utilized to verify the feasibility of employing the hybrid model to conduct multi-task pile damage detection.
- (3)
- Benefiting from the proposed multi-sensor detection method as well as the multi-task learning framework, the accuracy metrics derived from different sample sizes are satisfactory. For the purpose of only identifying whether there are defects below the sensors (i.e., Task 1-I), even a small sample set (e.g., 1000 in this case) can obtain an excellent recognition accuracy (F1 Score = 0.94) based on the hybrid model. If the number and type of defects need to be determined in some cases, a larger sample size is required (e.g., ≥4000 in this case) to obtain satisfactory CA (≥0.95) and BA (≥0.92) values.
- (4)
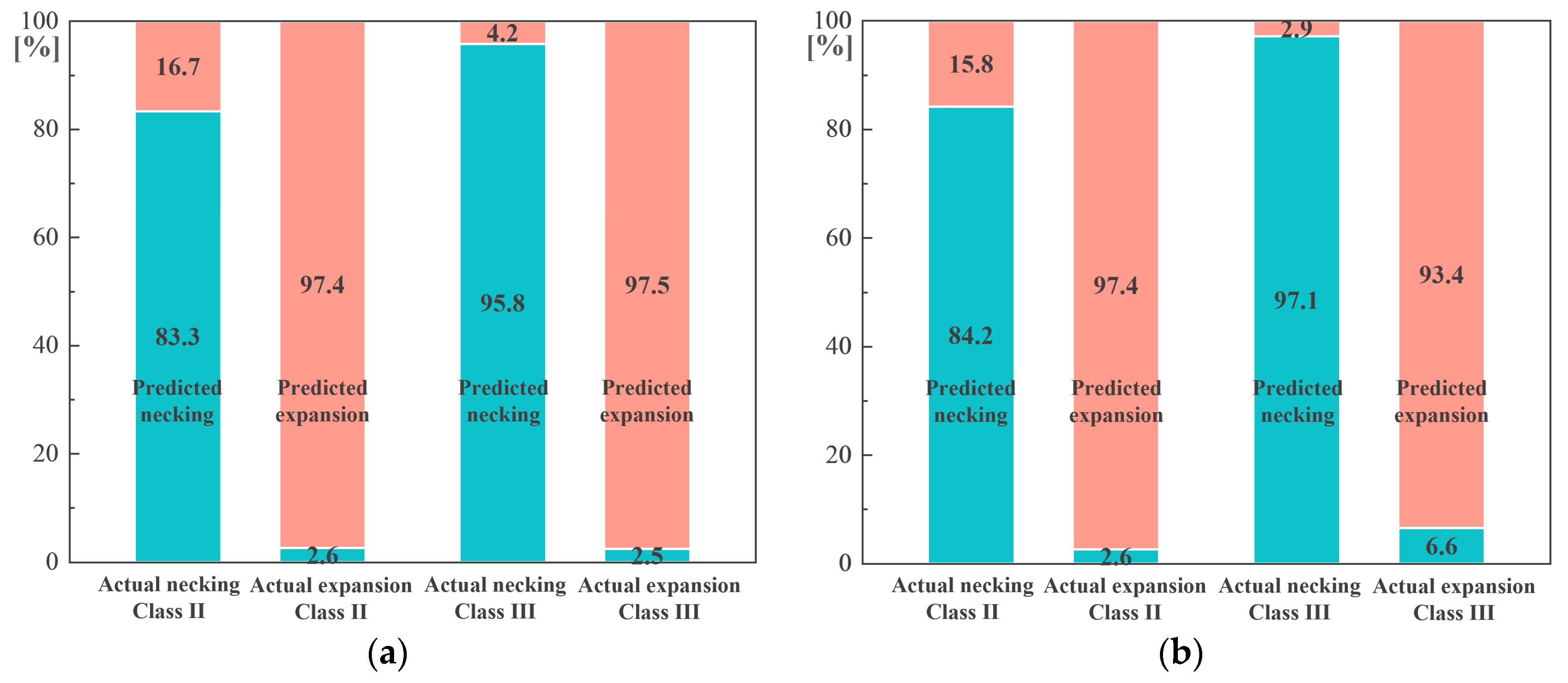
- The recognition accuracy of defect type increases as the sample size becomes larger. It is appropriate to construct a sample set of more than 4000 samples to reach 95% overall recognition accuracy, where the accuracy of expansion recognition is higher than that of necking recognition. The deviations of predicted defect degrees corresponding to the medians are basically lower than 20%, which can provide a more detailed description of the pile quality together with the number and type of defects.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Massoudi, N.; Teferra, W. Non-destructive testing of piles using the low strain integrity method. In Proceedings of the 15th International Conference on Case Histories in Geotechnical Engineer, New, York, NY, USA, 13–17 April 2004. [Google Scholar]
- Ding, X.; Liu, H.; Liu, J.; Chen, Y. Wave propagation in a pipe pile for low-strain integrity testing. J. Eng. Mech. 2011, 137, 598–609. [Google Scholar] [CrossRef]
- Zheng, C.; Liu, H.; Ding, X.; Kouretzis, G.P.; Sloan, S.W.; Poulos, H.G. Non-axisymmetric response of piles in low-strain integrity testing. Géotechnique 2017, 67, 181–186. [Google Scholar] [CrossRef]
- Wu, J.T.; Wang, K.H.; Gao, L.; Xiao, S. Study on longitudinal vibration of a pile with variable sectional acoustic impedance by integral transformation. Acta Geotech. 2019, 14, 1857–1870. [Google Scholar] [CrossRef]
- Chernauskas, L.R.; Paikowsky, S.G. Defect detection and examination of large drilled shafts using a new cross-hole sonic logging system. In Performance Confirmation of Constructed Geotechnical Facilities; American Society of Civil Engineers: Reston, VA, USA, 2000; pp. 66–83. [Google Scholar]
- Li, D.Q.; Zhang, L.M.; Tang, W.H. Reliability evaluation of cross-hole sonic logging for bored pile integrity. J. Geotech. Geoenvironmental Eng. 2005, 131, 1130–1138. [Google Scholar] [CrossRef]
- White, B.; Nagy, M.; Allin, R. Comparing cross-hole sonic logging and low-strain integrity testing results. In Proceedings of the Eighth International Conference on the Application of Stress Wave Theory to Piles, Lisbon, Portugal, 8–10 September 2008; pp. 471–476. [Google Scholar]
- Abishdid, C.; Hajali, M. Detecting location of construction defects in drilled shafts using frequency tomography analysis of cross-hole sonic logging. In Computing in Civil and Building Engineering; American Society of Civil Engineers: Reston, VA, USA, 2014; pp. 1723–1730. [Google Scholar]
- Davis, A.G. Nondestructive evaluation of existing deep foundations. J. Perform. Constr. Facil. 1995, 9, 57–74. [Google Scholar] [CrossRef]
- Sack, D.A.; Slaughter, S.H.; Olson, L.D. Combined measurement of unknown foundation depths and soil properties with nondestructive evaluation methods. Transp. Res. Rec. 2004, 1868, 76–80. [Google Scholar] [CrossRef]
- Wu, J.; Wang, K.; El Naggar, M.H. Dynamic soil reactions around pile-fictitious soil pile coupled model and its application in parallel seismic method. Comput. Geotech. 2019, 110, 44–56. [Google Scholar] [CrossRef]
- Wu, J.; El Naggar, M.H.; Wang, K. Analytical model for laterally loaded soil-extended pile shaft applied to verifying the applicability of lateral PS method. J. Geotech. Geoenvironmental Eng. 2021, 147, 04021103. [Google Scholar] [CrossRef]
- Yang, J.; Sun, X.L.; Bian, D.C.; Shao, J.X. Large-scale model test for detecting pile defects using the parallel seismic method. Soil Dyn. Earthq. Eng. 2020, 139, 106300. [Google Scholar] [CrossRef]
- Shmurak, D.V.; Churkin, A.A.; Lozovsky, I.N.; Zhostkov, R.A. Spectral Analysis of Parallel Seismic Method Data for Surveying Underground Structures. Bull. Russ. Acad. Sci. Phys. 2022, 86, 79–82. [Google Scholar] [CrossRef]
- Wu, J.; El Naggar, M.H.; Wang, K.; Wu, W. Lateral vibration characteristics of an extended pile shaft under low-strain integrity test. Soil Dyn. Earthq. Eng. 2019, 126, 105812. [Google Scholar] [CrossRef]
- Wu, J.; El Naggar, M.H.; Wang, K.; Liu, X. Analytical Study of Employing Low-Strain Lateral Pile Integrity Test on a Defective Extended Pile Shaft. J. Eng. Mech. 2020, 146, 04020103. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Worden, K.; Manson, G. The application of machine learning to structural health monitoring. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 515–537. [Google Scholar] [CrossRef] [PubMed]
- Finotti, R.P.; Cury, A.A.; Barbosa, F.D.S. An SHM approach using machine learning and statistical indicators extracted from raw dynamic measurements. Lat. Am. J. Solids Struct. 2019, 16, e165. [Google Scholar] [CrossRef]
- Tran-Ngoc, H.; Khatir, S.; Ho-Khac, H.; De Roeck, G.; Bui-Tien, T.; Wahab, M.A. Efficient Artificial neural networks based on a hybrid metaheuristic optimization algorithm for damage detection in laminated composite structures. Compos. Struct. 2021, 262, 113339. [Google Scholar] [CrossRef]
- Kingma, D.P.; Salimans, T.; Welling, M. Variational dropout and the local reparameterization trick. In Advances in Neural Information Processing Systems 28; MIT Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Nguyen, T.H.; Vu, A.T. Evaluating structural safety of trusses using Machine Learning. Frat. Integrità Strutt. 2021, 15, 308–318. [Google Scholar] [CrossRef]
- González, M.P.; Zapico, J.L. Seismic damage identification in buildings using neural networks and modal data. Comput. Struct. 2008, 86, 416–426. [Google Scholar] [CrossRef]
- Naresh, M.; Kumar, V.; Pal, J. A machine learning approach for health monitoring of a steel frame structure using statistical features of vibration data. Asian J. Civ. Eng. 2023, 25, 39–49. [Google Scholar] [CrossRef]
- Chun, P.J.; Yamashita, H.; Furukawa, S. Bridge damage severity quantification using multipoint acceleration measurement and artificial neural networks. Shock. Vib. 2015, 2015, 789384. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Golpayegani, F.; Moloney, C.; Clarke, S. A machine learning approach to bridge-damage detection using responses measured on a passing vehicle. Sensors 2019, 19, 4035. [Google Scholar] [CrossRef]
- Parisi, F.; Mangini, A.M.; Fanti, M.P.; Adam, J.M. Automated location of steel truss bridge damage using machine learning and raw strain sensor data. Autom. Constr. 2022, 138, 104249. [Google Scholar] [CrossRef]
- HosseinAbadi, H.Z.; Amirfattahi, R.; Nazari, B.; Mirdamadi, H.R.; Atashipour, S.A. GUW-based structural damage detection using WPT statistical features and multiclass SVM. Appl. Acoust. 2014, 86, 59–70. [Google Scholar] [CrossRef]
- Khatir, S.; Boutchicha, D.; Le Thanh, C.; Tran-Ngoc, H.; Nguyen, T.N.; Abdel-Wahab, M. Improved ANN technique combined with Jaya algorithm for crack identification in plates using XIGA and experimental analysis. Theor. Appl. Fract. Mech. 2020, 107, 102554. [Google Scholar] [CrossRef]
- Khatir, S.; Khatir, T.; Boutchicha, D.; Le Thanh, C.; Tran, N.H.; Bui, T.Q.; Abdel Wahab, M. An efficient hybrid TLBO-PSO-ANN for fast damage identification in steel beam structures using IGA. Smart Struct. Syst. 2020, 25, 605–617. [Google Scholar]
- Bui-Tien, T.; Bui-Ngoc, D.; Nguyen-Tran, H.; Nguyen-Ngoc, L.; Tran-Ngoc, H.; Tran-Viet, H. Damage detection in structural health monitoring using hybrid convolution neural network and recurrent neural network. Frat. Integrità Strutt. 2022, 16, 461–470. [Google Scholar] [CrossRef]
- Teng, S.; Chen, G.; Liu, Z.; Cheng, L.; Sun, X. Multi-sensor and decision-level fusion-based structural damage detection using a one-dimensional convolutional neural network. Sensors 2021, 21, 3950. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Seno, A.H.; Sharif Khodaei, Z.; Aliabadi, M.F. Structural Health Monitoring Impact Classification Method Based on Bayesian Neural Network. Polymers 2022, 14, 3947. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.; Zhou, Q.; Lei, J.; Wang, X. A Two-Stage Structural Damage Detection Method Based on 1D-CNN and SVM. Appl. Sci. 2022, 12, 10394. [Google Scholar] [CrossRef]
- Wu, J.; El Naggar, M.H.; Ge, J.; Wang, K.; Zhao, S. Multipoint Traveling Wave Decomposition Method and Its Application in Extended Pile Shaft Integrity Test. J. Geotech. Geoenvironmental Eng. 2021, 147, 04021128. [Google Scholar] [CrossRef]
- Wu, J.; El Naggar, M.H.; Wang, K. Pile Damage Detection Using Machine Learning with the Multipoint Traveling Wave Decomposition Method. Sensors 2023, 23, 8308. [Google Scholar] [CrossRef]
- Gaudio, D.; Juntae, S.; Stuart, H.; Giulia, V.; Gopal, M. 3D nonlinear dynamic Finite Element analysis of onshore wind turbines on pile foundation resting on liquefiable soils. In Proceedings of the 10th European Conference on Numerical Methods in Geotechnical Engineering, NUMGE 2023, London, UK, 26–28 June 2023; pp. 1–6. [Google Scholar]
- Liang, F.; Jia, X.; Zhang, H.; Wang, C.; Shen, P. Seismic responses of offshore wind turbines based on a lumped parameter model subjected to complex marine loads at scoured sites. Ocean. Eng. 2024, 116808. [Google Scholar] [CrossRef]
- Zheng, H.; Zhang, H.; Liang, F.; Li, L. Numerical investigation on lateral monotonic and cyclic responses of scoured rigid monopile based on an integrated bounding surface model. Comput. Geotech. 2024, 166, 105997. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A review of recurrent neural networks: LSTM cells and network architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef] [PubMed]
- Sherstinsky, A. Fundamentals of recurrent neural network (RNN) and long short-term memory (LSTM) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- JGJ 106; Technical Code for Building Pile Foundation. The Professional Standards Compilation Group of People’s Republic of China: Beijing, China, 2014.
- Novak, M.; Aboul-Ella, F.; Nogami, T. Dynamic soil reactions for plane strain case. J. Eng. Mech. Div. 1978, 104, 953–959. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Labels of Outputs | Description (Below Sensors) |
|---|---|
| There is no defect. | |
| There is one defect, whose acoustic impedance value is 31% lower than that of the intact segment. | |
| There are multiple defects, and the acoustic impedance value of the closest defect is 16% higher than that of the intact segment. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; El Naggar, M.H.; Wang, K. A Hybrid Convolutional and Recurrent Neural Network for Multi-Sensor Pile Damage Detection with Time Series. Sensors 2024, 24, 1190. https://doi.org/10.3390/s24041190
Wu J, El Naggar MH, Wang K. A Hybrid Convolutional and Recurrent Neural Network for Multi-Sensor Pile Damage Detection with Time Series. Sensors. 2024; 24(4):1190. https://doi.org/10.3390/s24041190
Chicago/Turabian StyleWu, Juntao, M. Hesham El Naggar, and Kuihua Wang. 2024. "A Hybrid Convolutional and Recurrent Neural Network for Multi-Sensor Pile Damage Detection with Time Series" Sensors 24, no. 4: 1190. https://doi.org/10.3390/s24041190
APA StyleWu, J., El Naggar, M. H., & Wang, K. (2024). A Hybrid Convolutional and Recurrent Neural Network for Multi-Sensor Pile Damage Detection with Time Series. Sensors, 24(4), 1190. https://doi.org/10.3390/s24041190