Ambient Monitoring Portable Sensor Node for Robot-Based Applications

 ,
,  and
and 
Abstract
1. Introduction
- The multi-sensor sensing layer provides the ability to detect leakages of a wide range of chemicals, as confirmed by the tests.
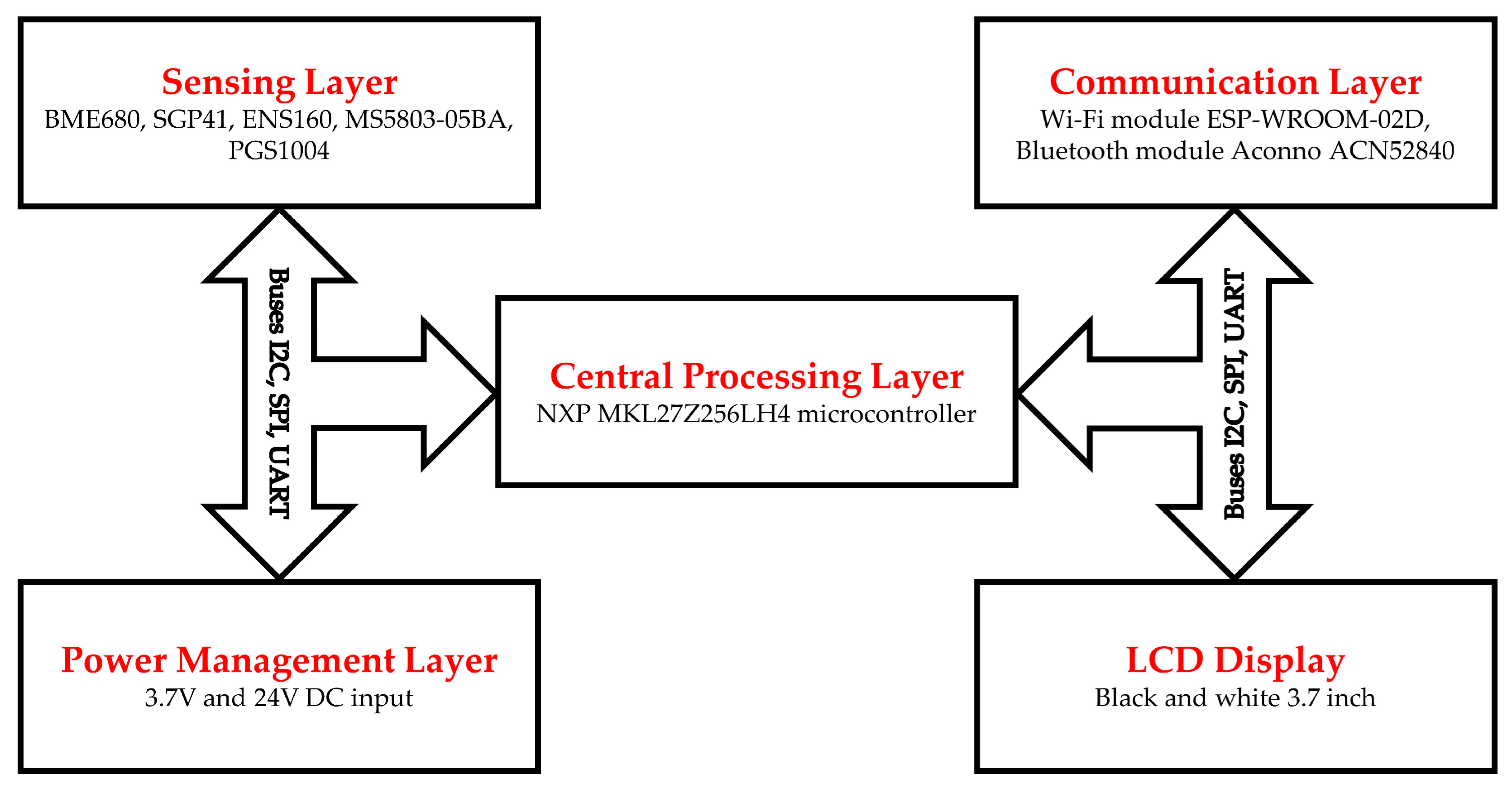
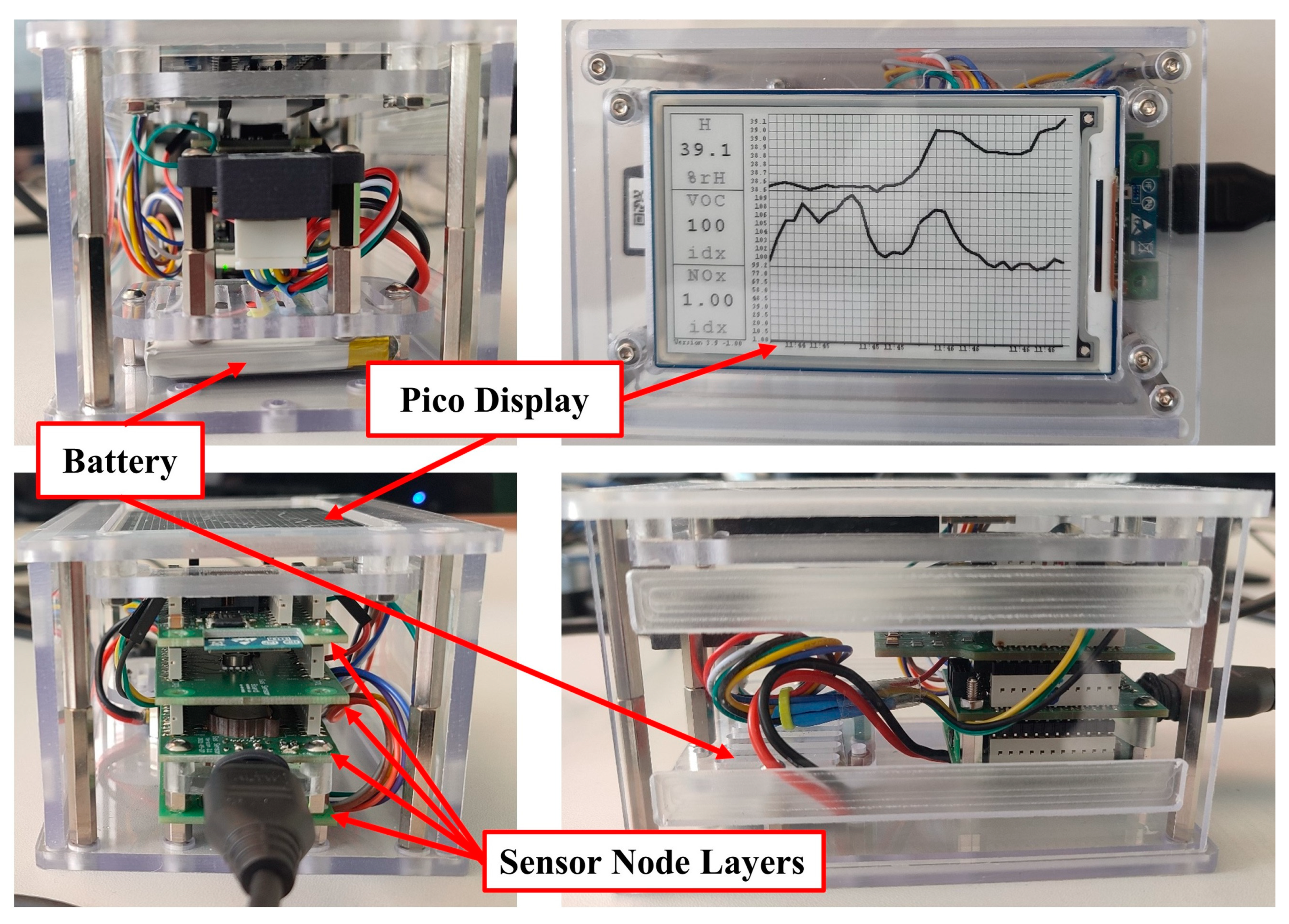
- The possibility of displaying the recorded data directly on the node itself using the built-in display screen, in addition to the possibility of viewing the data remotely through the monitoring program in the control stations through the cloud.
- The presence of a Bluetooth module in the communication layer provides the possibility of using the node to track the location of a chemical leakage using Beacon Bluetooth technology.
2. Materials and Methods
3. Experimental Tests and Results
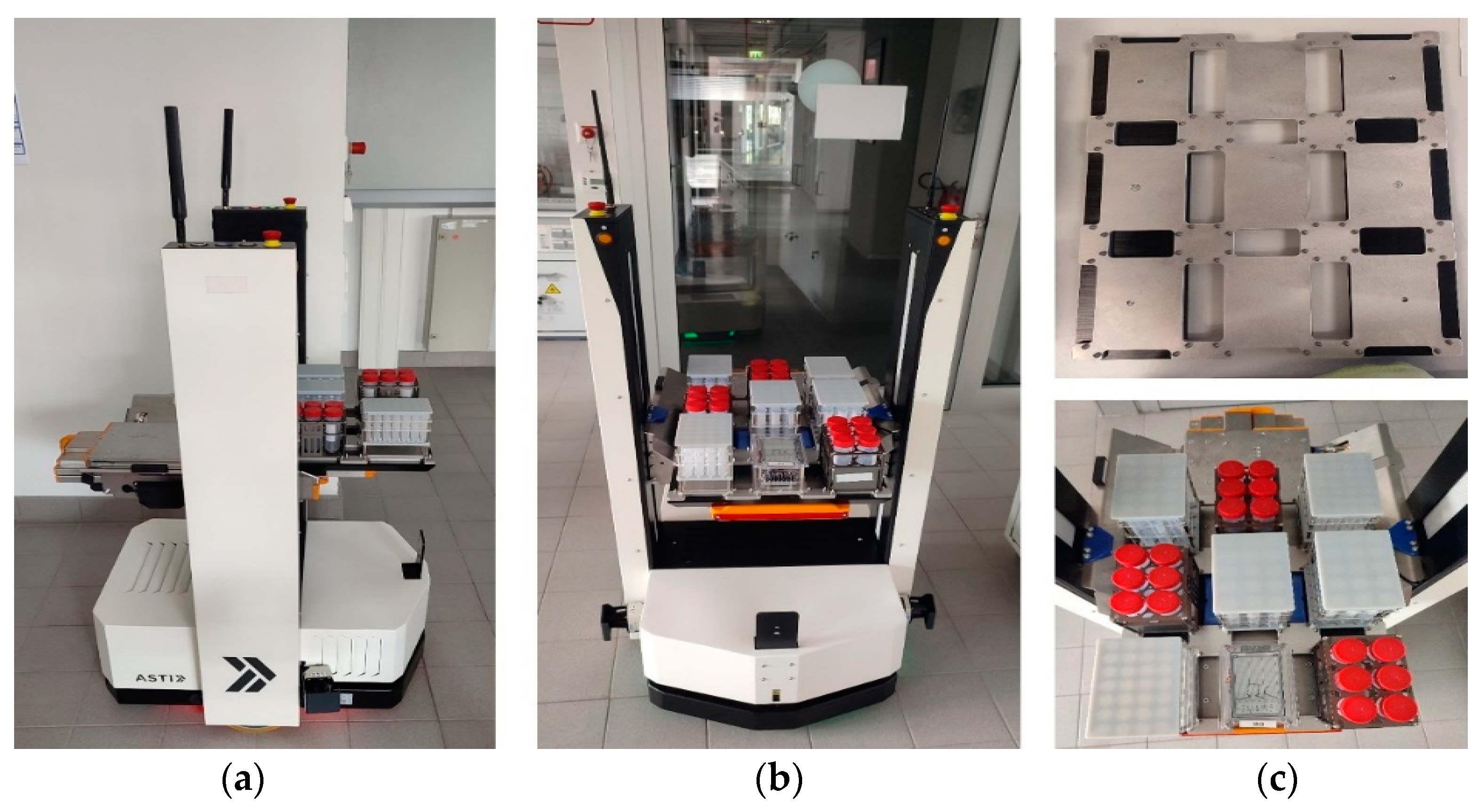
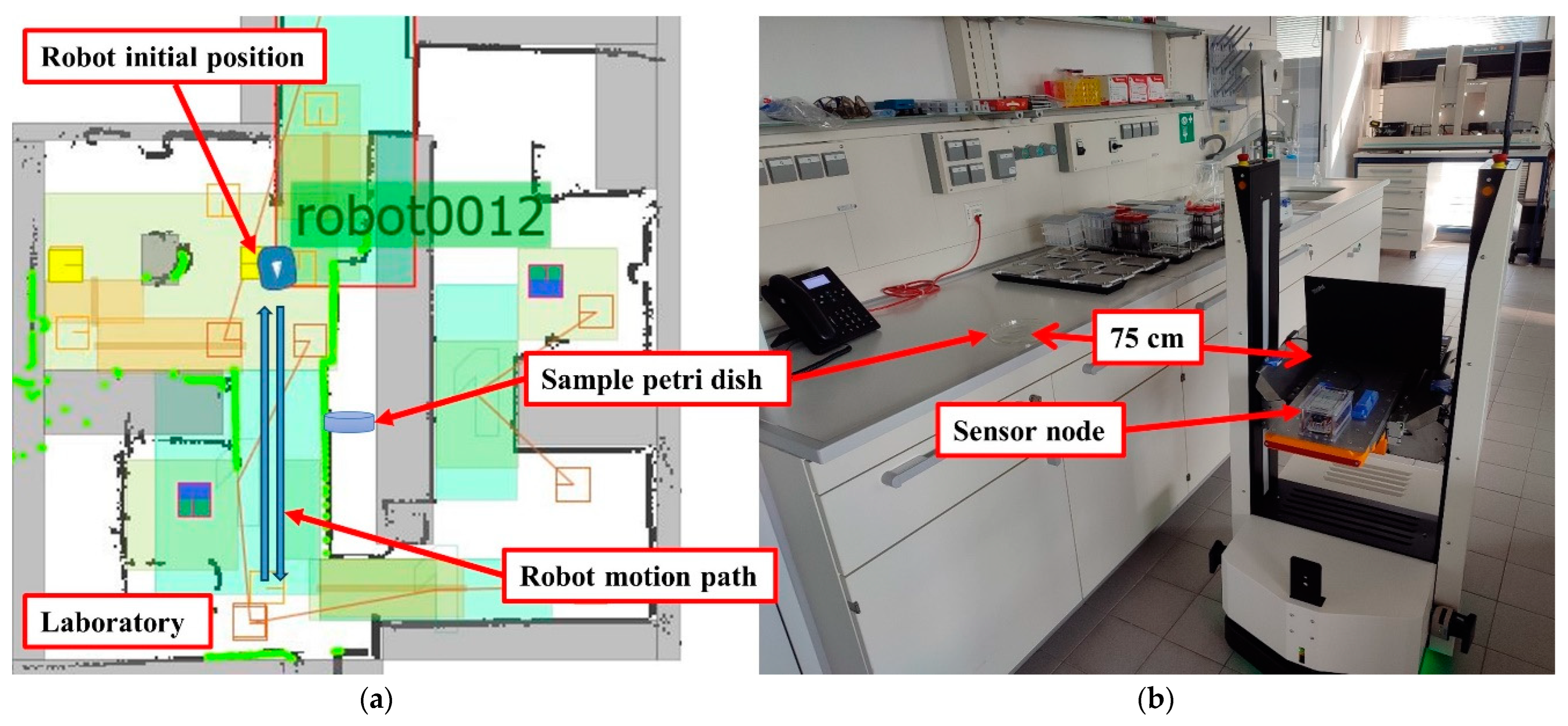
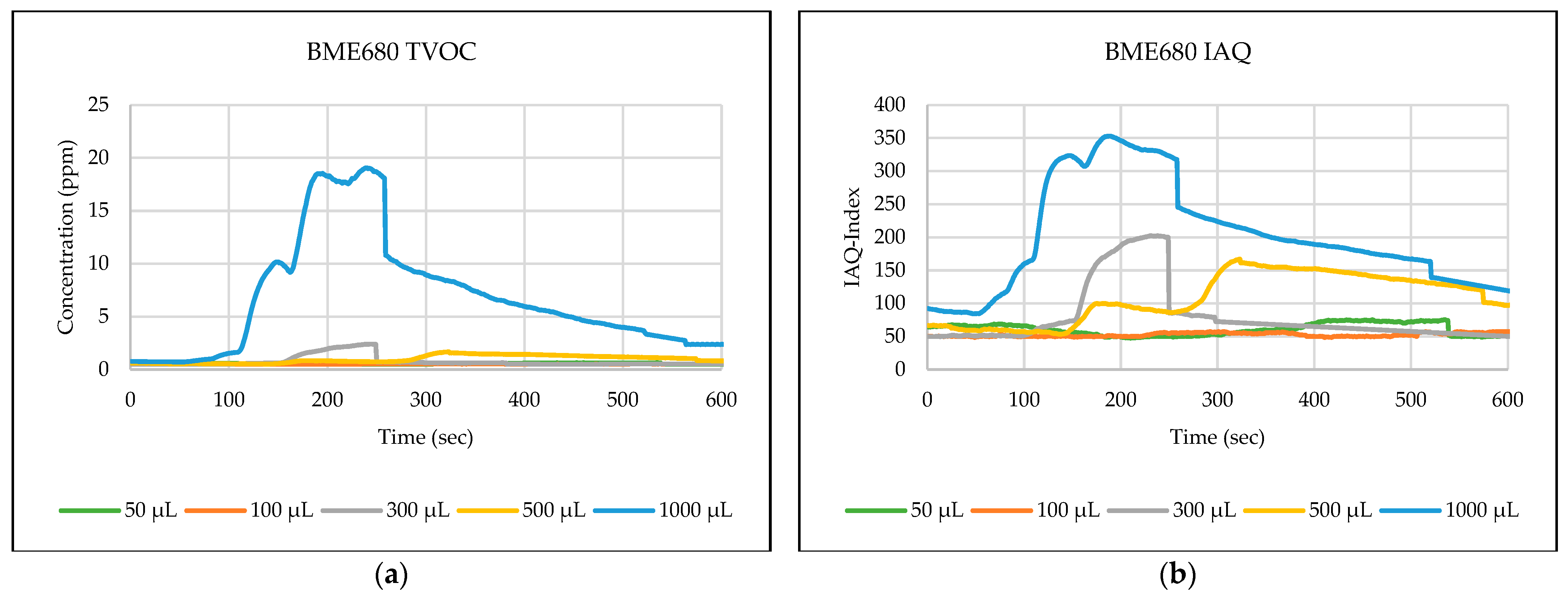
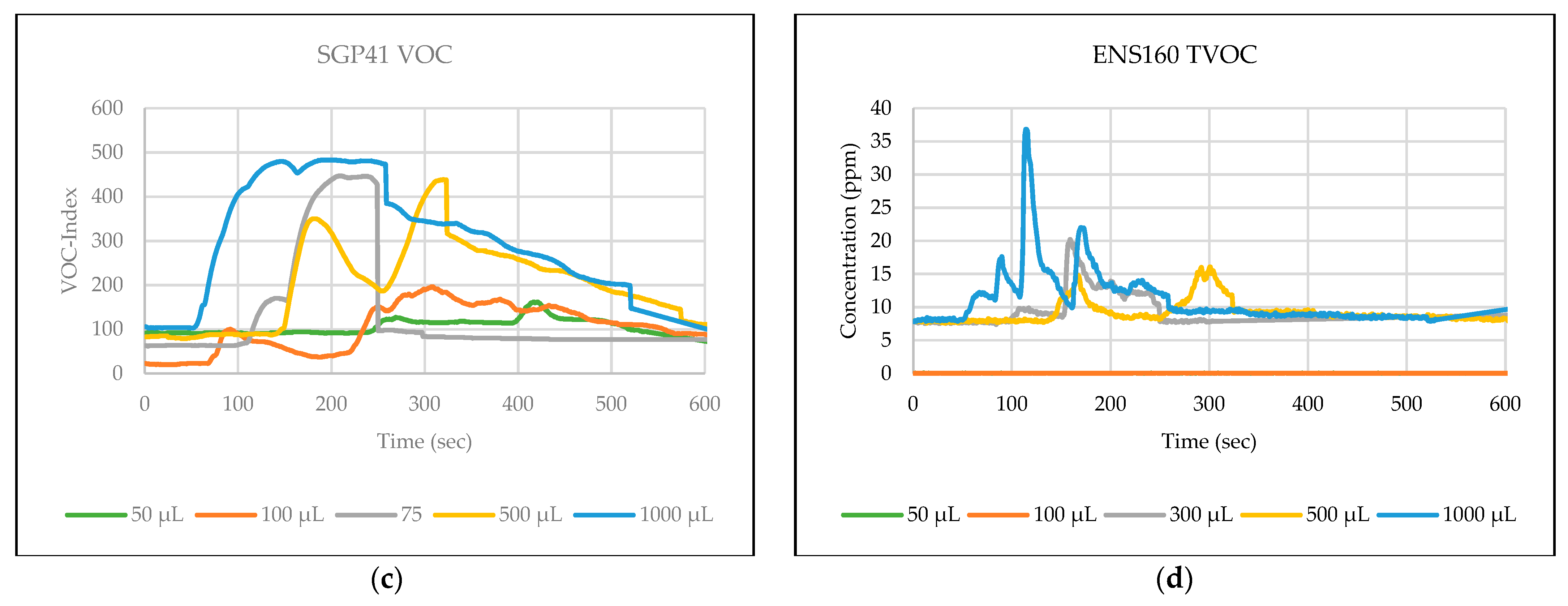
3.1. Tests and Results for Mobile Robots
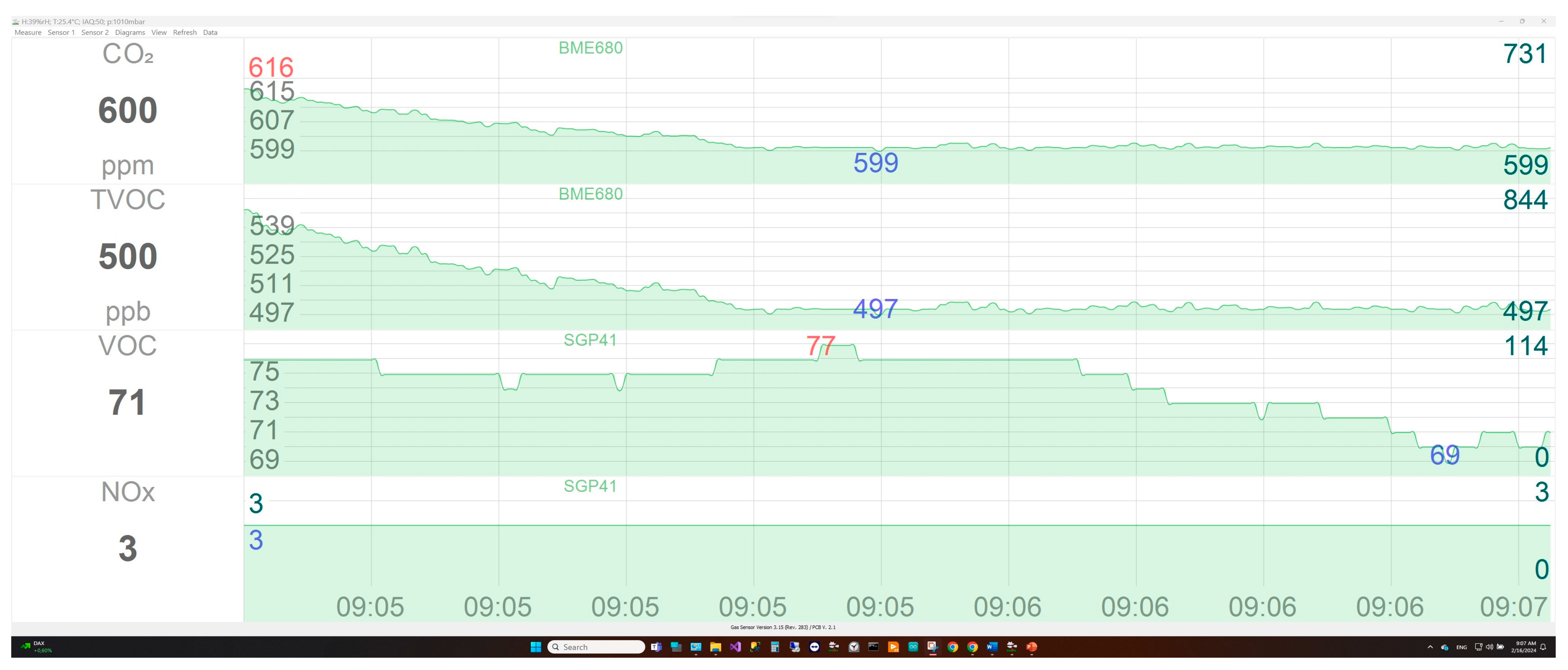
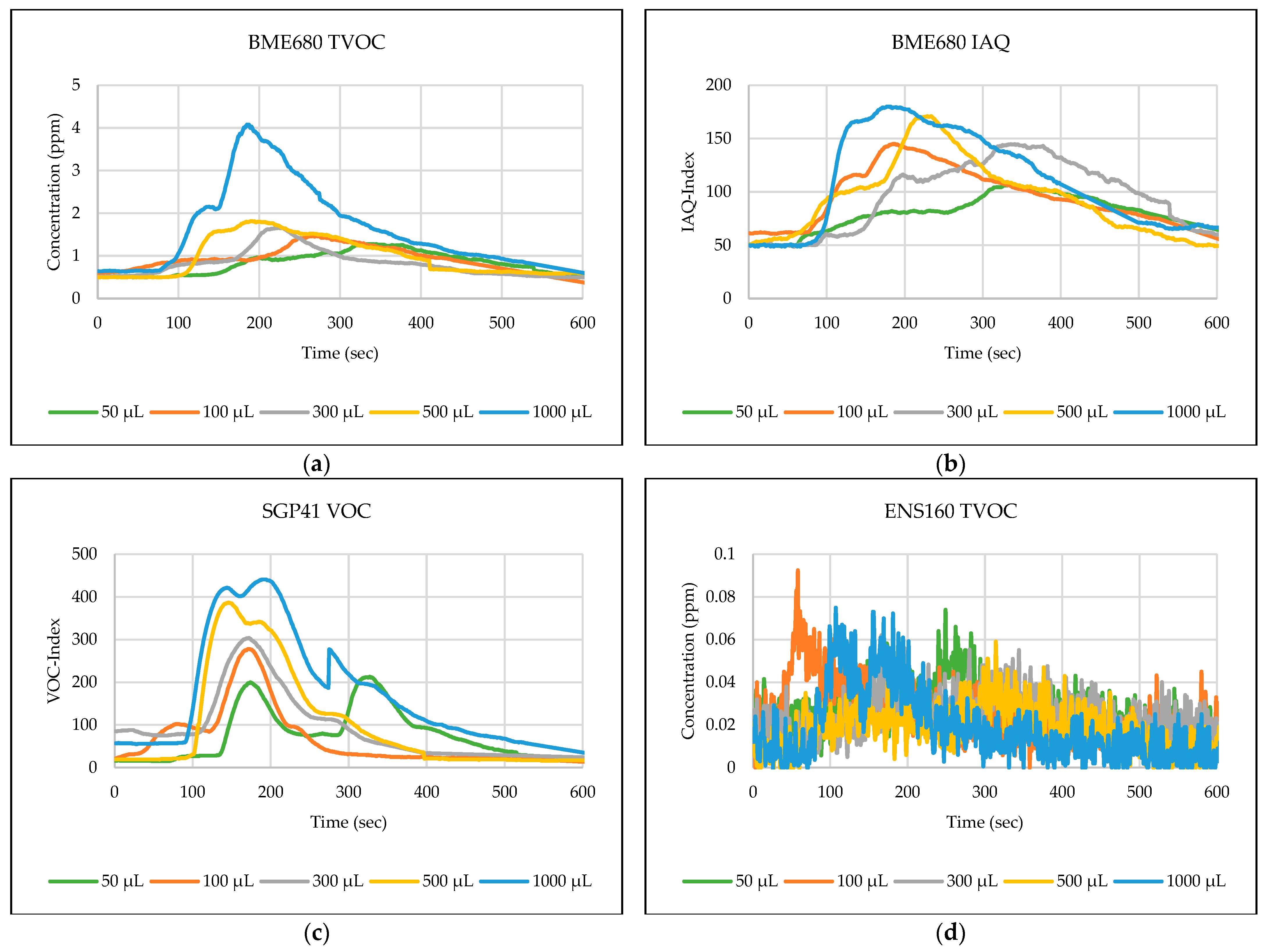
- BME680: Tests indicate that the sensor was capable of effectively detecting ethanol leakages with a volume of ≥300 µL. In contrast, the sensor’s response was weak for all test samples for acetone and toluene. The sensor’s response was also moderate for isopropanol; effective responses were reached for samples of ≥100 µL. The sensor’s response was also acceptable for methanol samples, as it was able to clearly detect leakage for samples of ≥300 µL.
- SGP41: Tests showed that the sensor was capable of effectively detecting ethanol leakages with a volume of ≥100 µL. The sensor’s response was good for acetone samples of ≥300 µL as well as for all tested isopropanol volumes (effective response for samples of ≥50 µL). Furthermore, the sensor showed an excellent response (the best compared to the rest of the tested materials) to all tested sizes of methanol, as it was able to clearly detect leakage for samples of ≥50 µL. In addition, sensor responses were also good for toluene samples with a volume of ≥100 µL.
- ENS160: The sensor showed good response to the tested sample volume of ≥300 µL of ethanol. In contrast, the sensor’s response was weak for all test samples for acetone, isopropanol, and toluene. The sensor’s response was also weak for methanol samples, as it was able to clearly detect leakage for samples of ≥1000 µL.
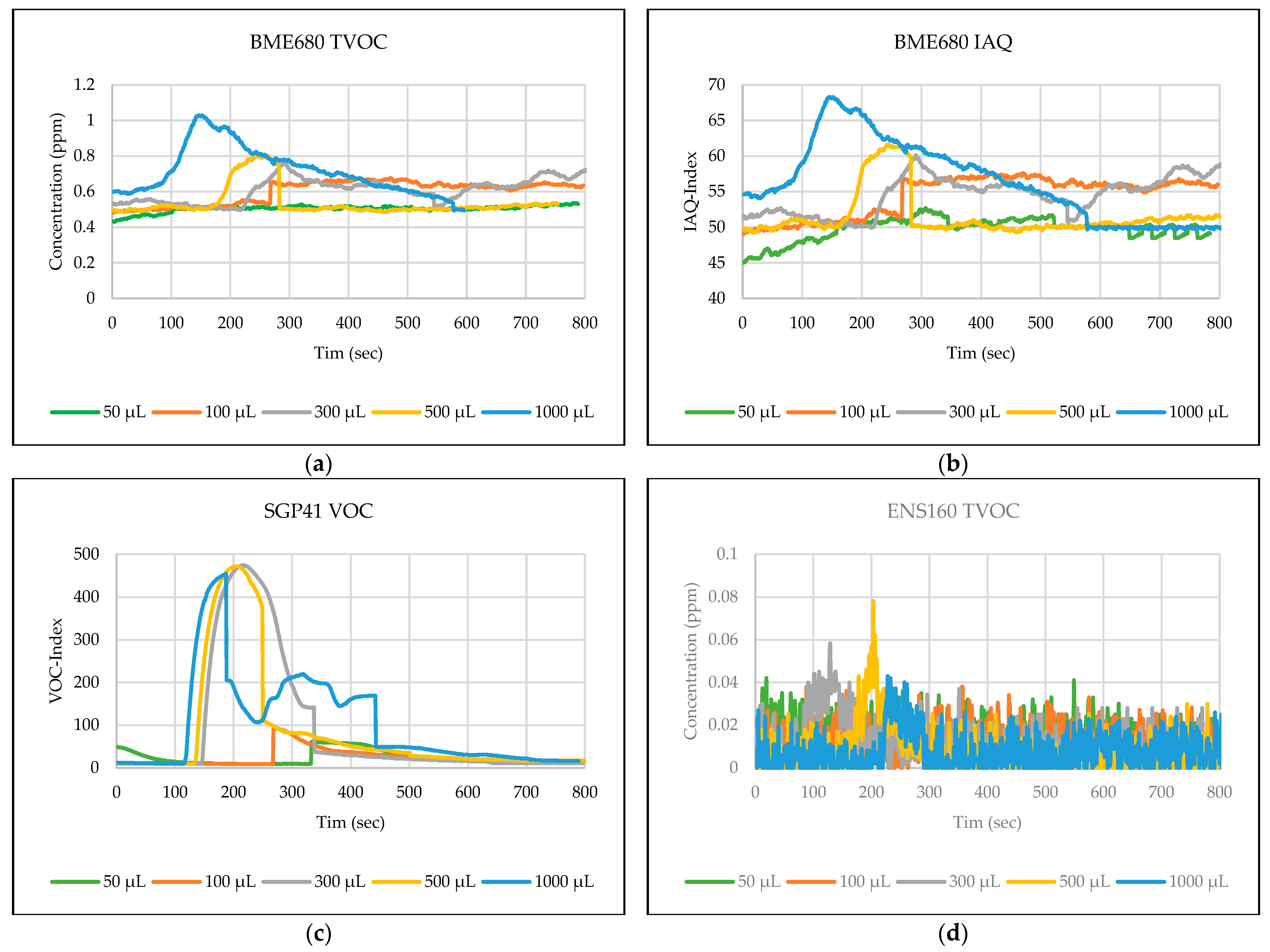
3.2. Tests and Results for Stationary Robots Applications
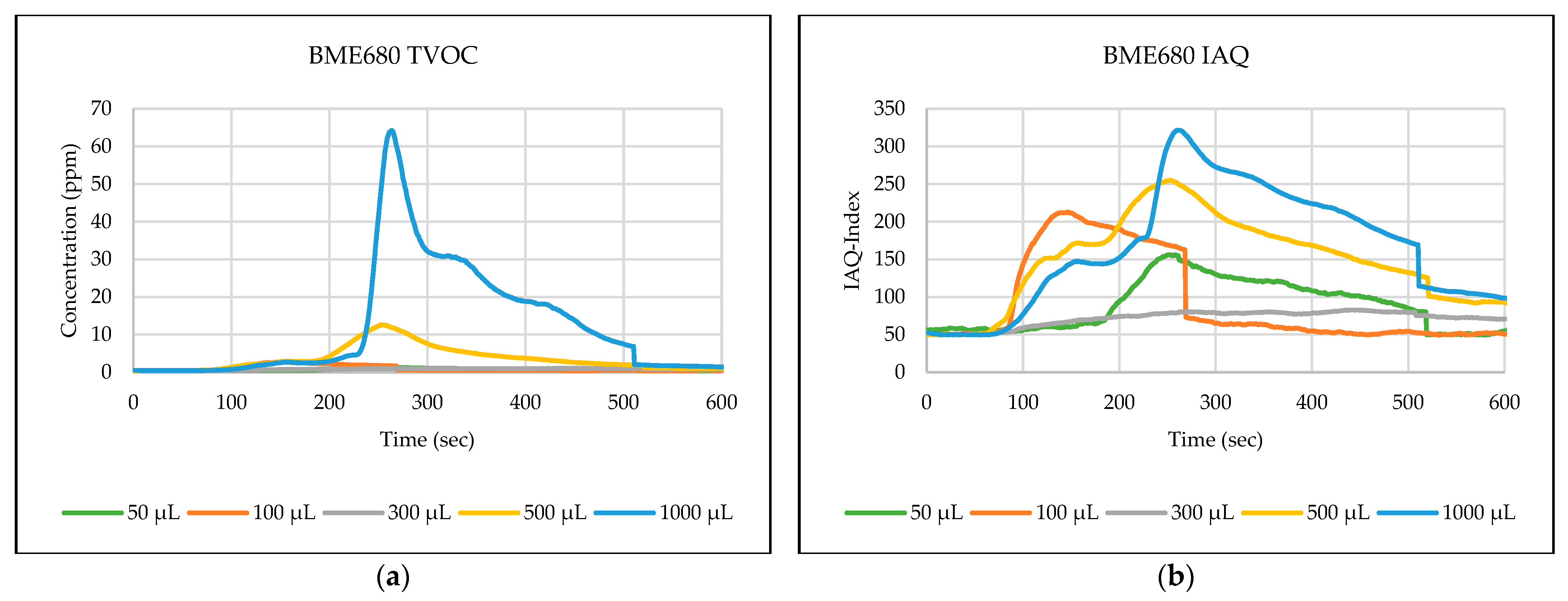
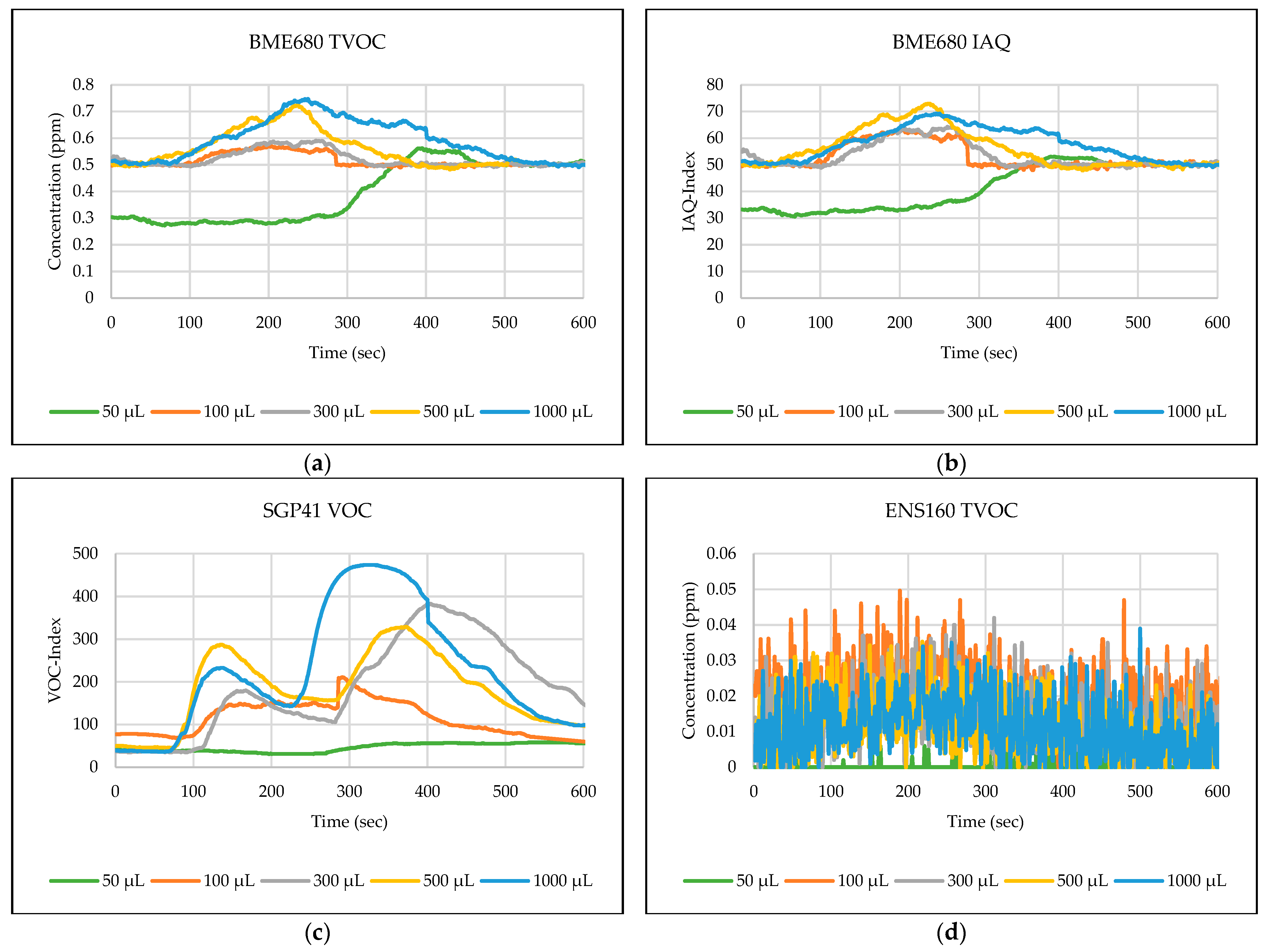
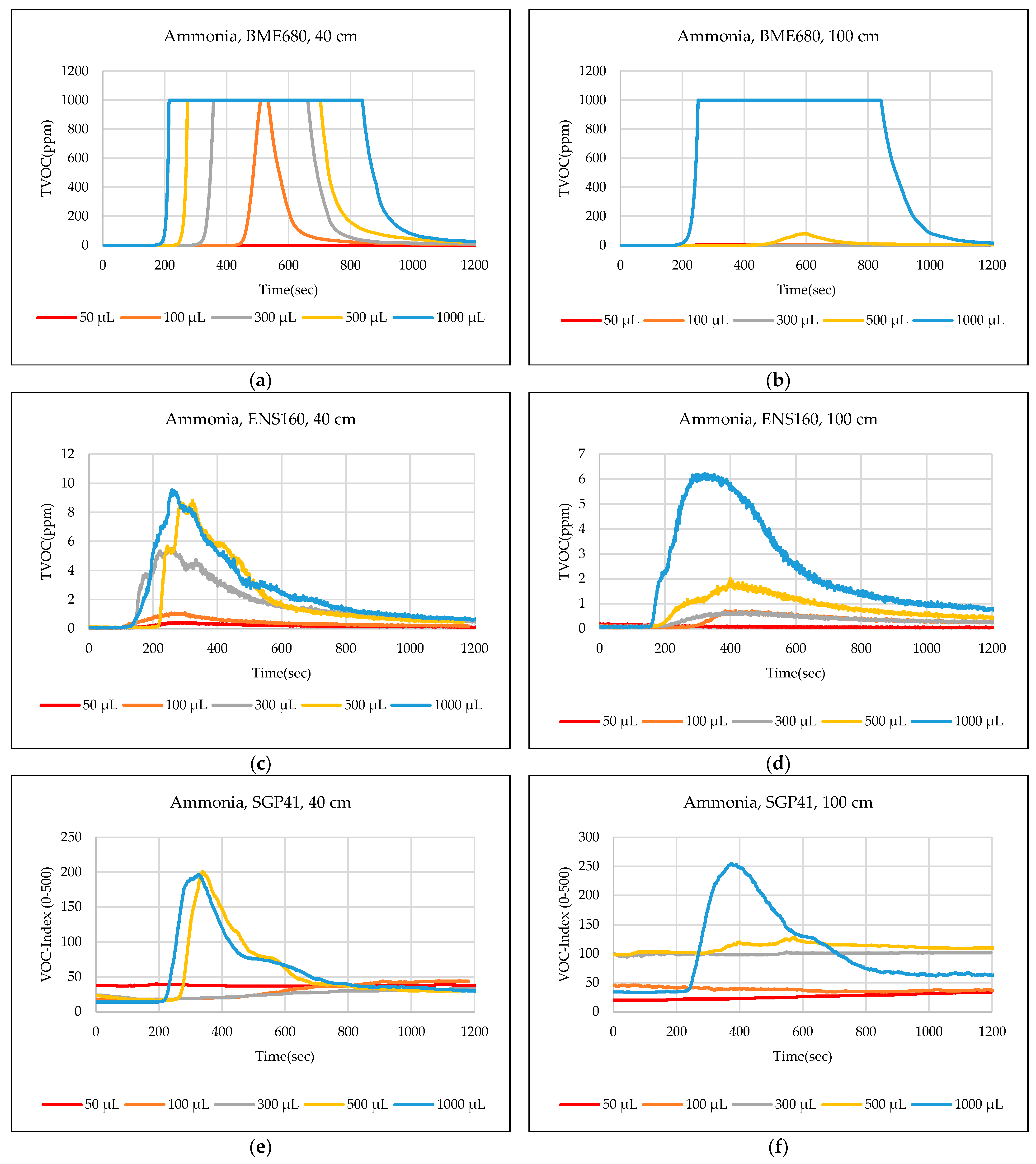
- Ammonia: The tests indicate that the BME680 sensor can detect volumes of ≥50 µL, with a maximum response (saturation = 1000 ppm) for a 40 cm distance. The response is less when increasing the distance to 100 cm, where only volumes of ≥500 µL can be detected. The ENS160 sensor can detect volumes of ≥100 µL, with a maximum response of ≈9.5 ppm for a 40 cm distance, and the response is lower when increasing the distance to 100 cm, where only volumes of ≥500 µL can be detected. The SGP41 sensor detects volumes of ≥500 µL, with a maximum response of ≈200 VOC-index for a 40 cm distance, and only volumes of ≥1000 µL are detected for the test distance of 100 cm.
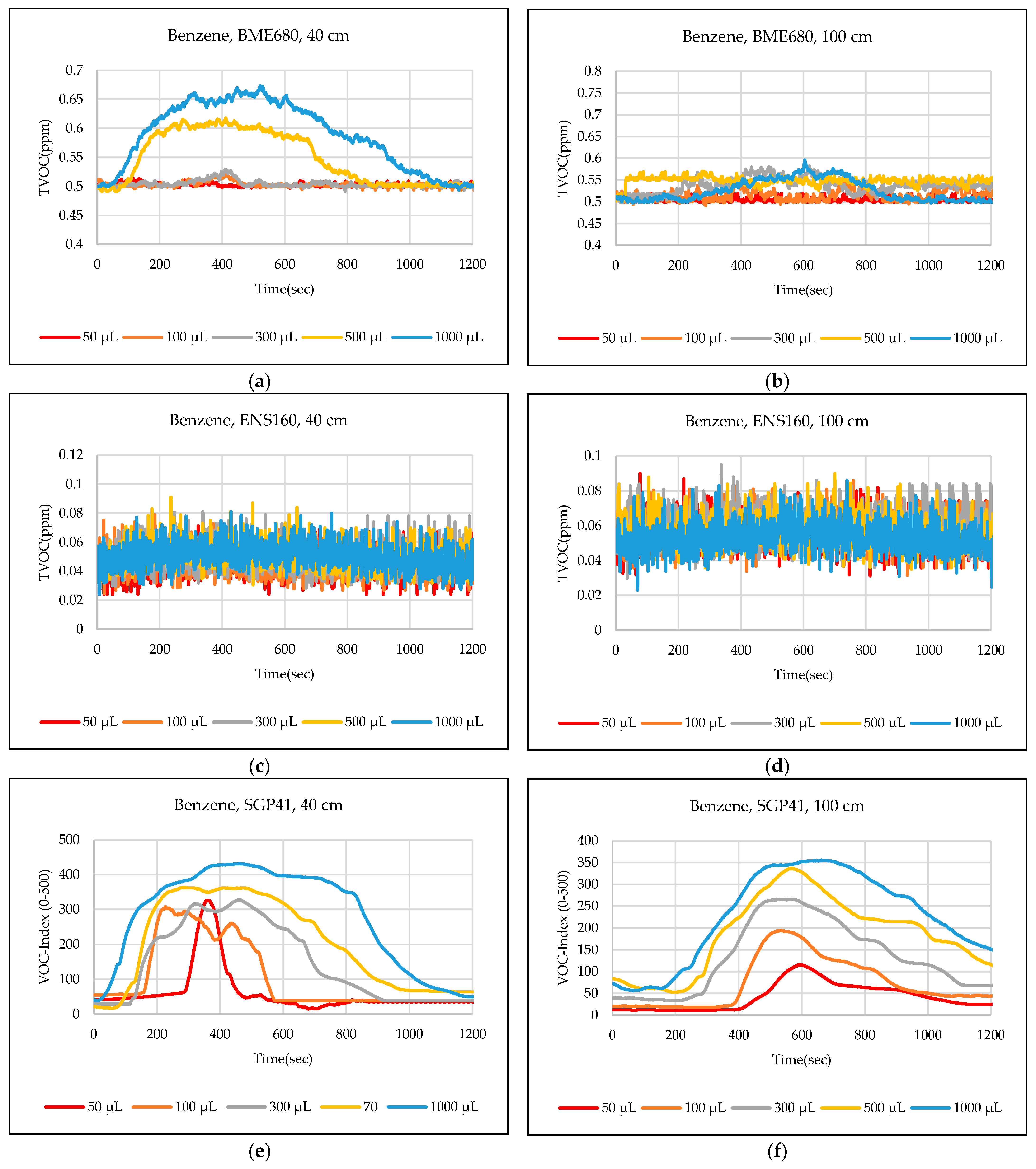
- Benzene: The tests prove that the BME680 sensor has a weak response and can detect only volumes of ≥500 µL, with a maximum response of ≈600 ppb at a 40 cm distance. Increasing the distance to 100 cm resulted in a lower response; thus, no volumes could be detected. The ENS160 sensor was unable to detect any volumes for both distances. The SGP41 sensor shows an excellent response for both distances. It can detect volumes of ≥50 µL at a 40 cm distance, with a good response for volumes of ≥100µL. For a distance of 100 cm, measurement volumes of ≥100µL can be detected.
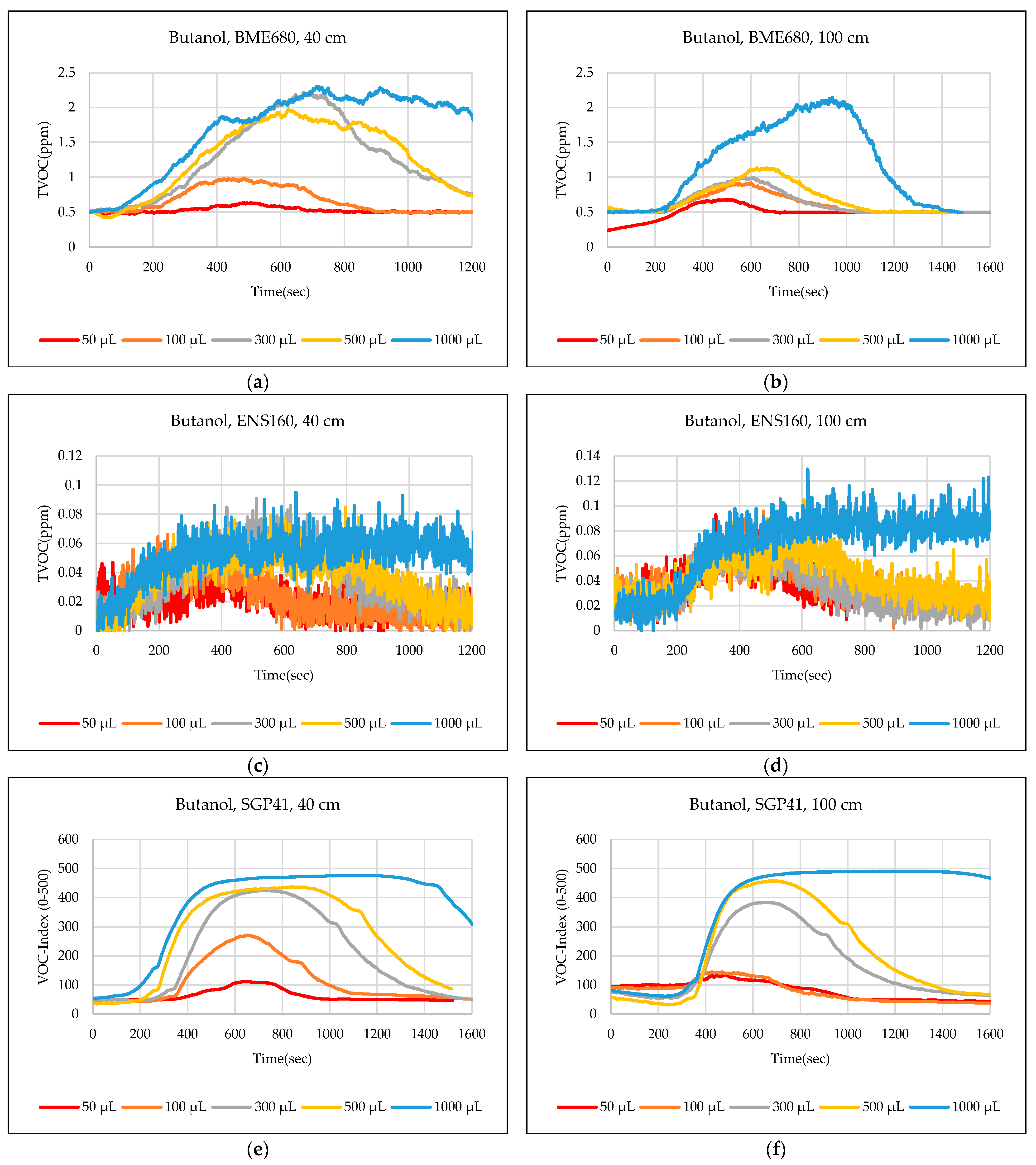
- Butanol: The tests strongly suggest that the BME680 sensor can detect volumes of ≥100 µL, with a maximum response of ≈2.5 ppm for 1 mL volume at a 40 cm distance. The response reduces when increasing the distance to 100 cm, where it can detect only volumes of ≥500 µL. The ENS160 sensor cannot detect any volumes for both distances. The SGP41 sensor shows a good response for volumes of ≥100 µL at a 40 cm distance, and a response for volumes of ≥300 µL for the test distance of 100 cm.
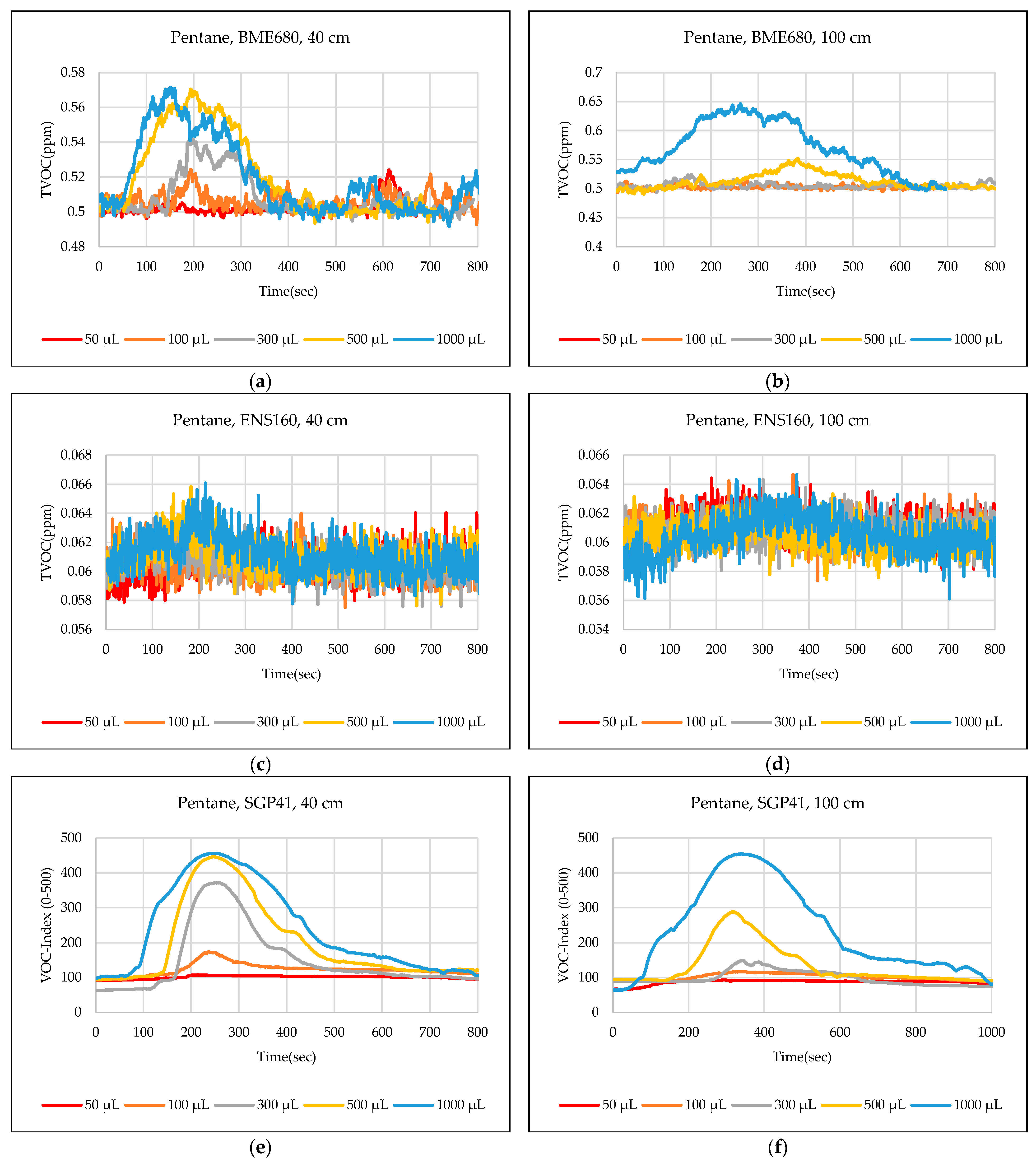
- Pentane: The tests show that the BME680 sensor can only detect volumes of ≥300 µL for a 40 cm distance. For a distance of 100 cm, only volumes of ≥1000 µL can be detected. The ENS160 sensor cannot detect any volumes for both distances. The SGP41 sensor can detect volumes of ≥100 for a 40 cm distance, and it detects only volumes of ≥300 µL for the test distance of 100 cm.
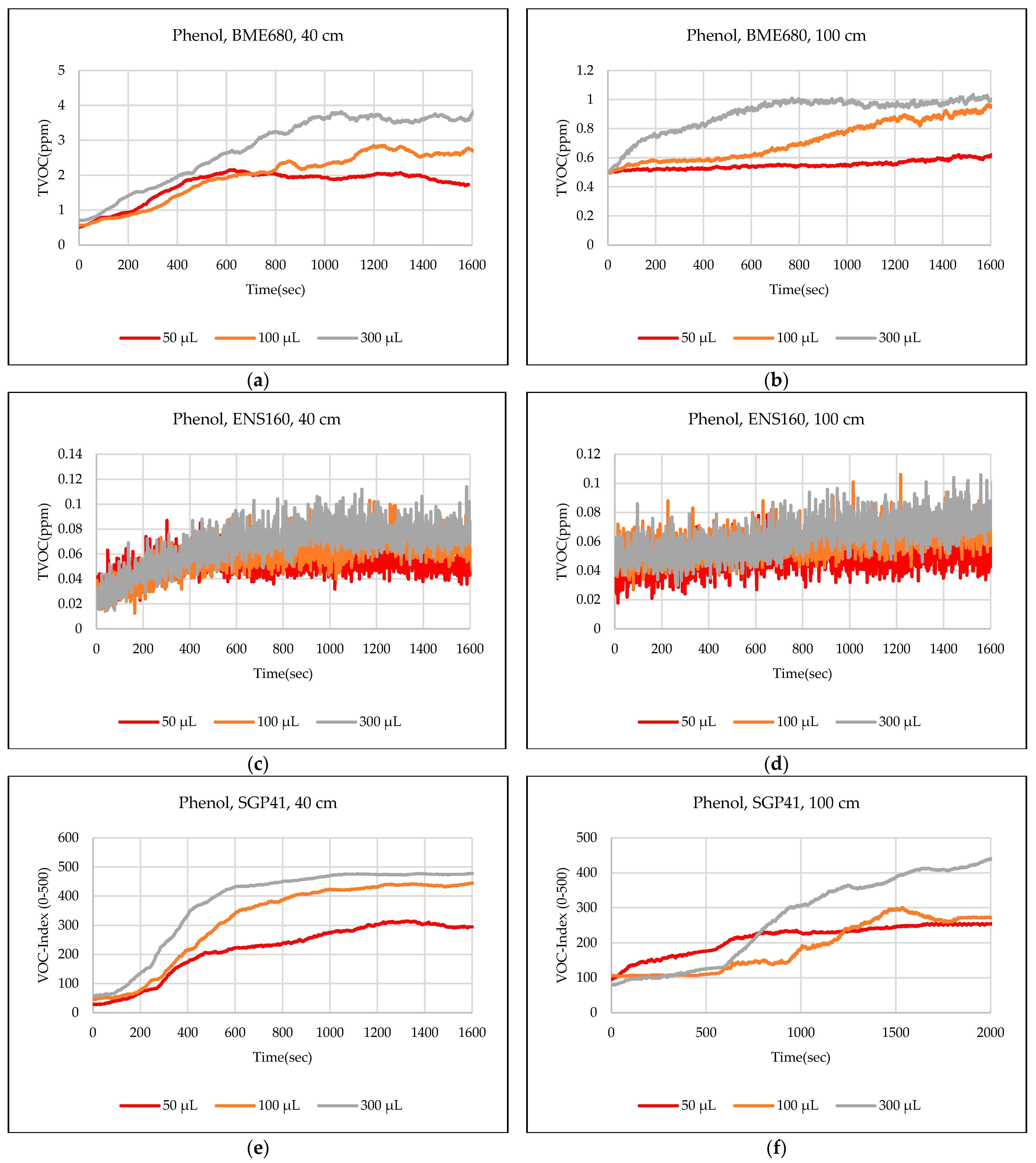
- Phenol: The tests indicate that the BME680 sensor can detect all tested volumes of ≥50 µL for a 40 cm distance. The response is less when increasing the distance to 100 cm, where it can detect only volumes of ≥100 µL. The ENS160 sensor cannot detect any volumes for both distances. The SGP41 sensor shows good responses and can detect all the tested volumes of ≥50 µL for both distances. The sensor recovery time for this compound is very long (around 30 min), so only three volumes (50 µL, 100 µL, 300 µL) were tested for phenol.
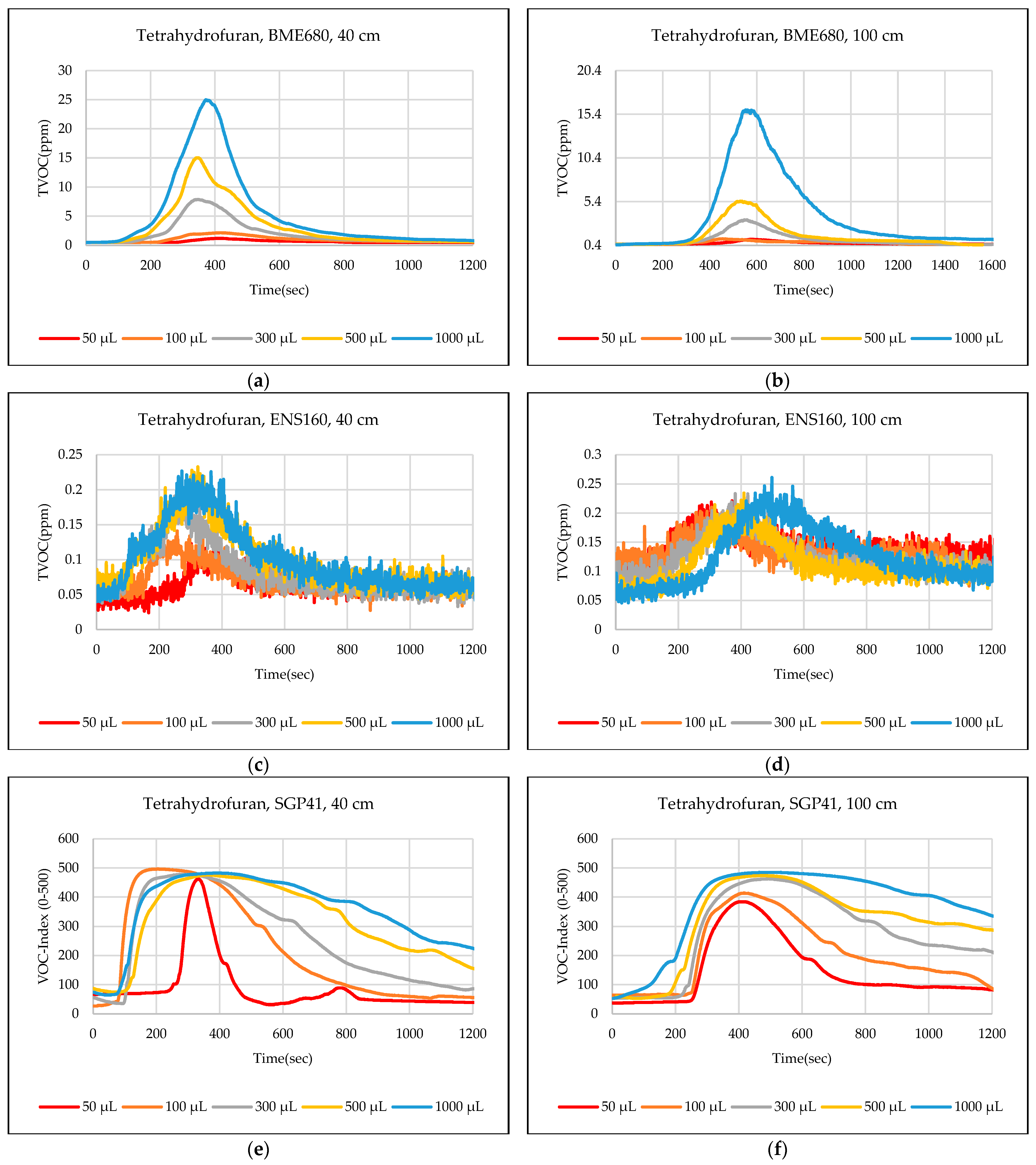
- Tetrahydrofuran: The tests indicate that all sensors can detect all the tested volumes ≥50 µL for both distances.
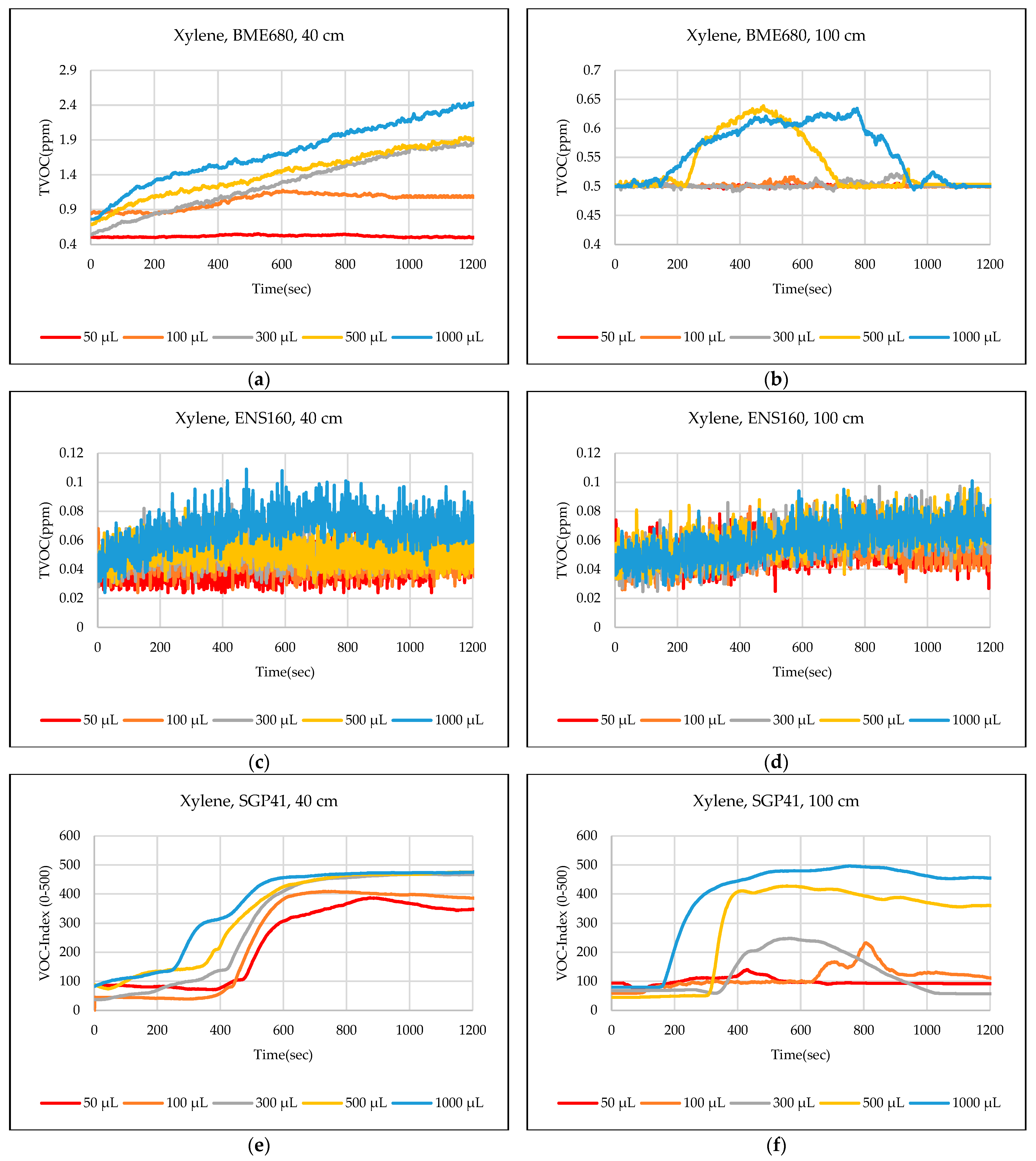
- Xylene: The tests indicate that the BME680 sensor can detect volumes of ≥300 µL for a 40 cm distance, and volumes of ≥500 µL for a 100 cm distance. The ENS160 sensor can detect volumes of ≥500 µL for a 40 cm distance and cannot detect any volumes for a 100 cm distance. The SGP41 sensor can detect all the tested volumes of ≥50 µL for a 40 cm distance, and it detects only volumes of ≥100 µL for the test distance of 100 cm.
4. Conclusions and Future Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Keshvarparast, A.; Battini, D.; Battaia, O.; Pirayesh, A. Collaborative Robots in Manufacturing and Assembly Systems: Literature Review and Future Research Agenda. J. Intell. Manuf. 2023. [Google Scholar] [CrossRef]
- Al-Okby, M.F.R.; Roddelkopf, T.; Fleischer, H.; Thurow, K. Robot-Based Environmental Monitoring in Automated Life Science Laboratories. In Proceedings of the 2022 IEEE 10th Jubilee International Conference on Computational Cybernetics and Cyber-Medical Systems (ICCC), Reykjavík, Iceland, 6–9 July 2022; pp. 395–400. [Google Scholar]
- Neubert, S.; Roddelkopf, T.; Al-Okby, M.F.R.; Junginger, S.; Thurow, K. Flexible IoT Gas Sensor Node for Automated Life Science Environments Using Stationary and Mobile Robots. Sensors 2021, 21, 7347. [Google Scholar] [CrossRef] [PubMed]
- Hallal, A.; Andraos, R.; Saad, G.A.; Boyajian, T.; Hoballah, J. Mass Casualty Management during a Pandemic Surge: The American University of Beirut Medical Center Experience. Semin. Vasc. Surg. 2021, 34, 51–59. [Google Scholar] [CrossRef] [PubMed]
- 2020 Beirut Explosion. Wikipedia. 2023. Available online: https://en.wikipedia.org/wiki/2020_Beirut_explosion#:~:text=On%204%20August%202020%2C%20a,an%20estimated%20300%2C000%20people%20homeless (accessed on 24 January 2024).
- Chen, C.; Xie, G.; Dai, J.; Li, W.; Cai, Y.; Li, J.; Zhang, Q.; Tai, H.; Jiang, Y.; Su, Y. Integrated Core-Shell Structured Smart Textiles for Active NO2 Concentration and Pressure Monitoring. Nano Energy 2023, 116, 108788. [Google Scholar] [CrossRef]
- Al-Okby, M.F.R.; Roddelkopf, T.; Ewald, H.; Thurow, K. Testing and Integration of Commercial Hydrogen Sensor for Ambient Monitoring Application. In Proceedings of the 2023 IEEE 17th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 23–26 May 2023; pp. 811–818. [Google Scholar]
- Schilt, U.; Barahona, B.; Buck, R.; Meyer, P.; Kappani, P.; Möckli, Y.; Meyer, M.; Schuetz, P. Low-Cost Sensor Node for Air Quality Monitoring: Field Tests and Validation of Particulate Matter Measurements. Sensors 2023, 23, 794. [Google Scholar] [CrossRef] [PubMed]
- Mabrouki, J.; Azrour, M.; Fattah, G.; Dhiba, D.; Hajjaji, S.E. Intelligent Monitoring System for Biogas Detection Based on the Internet of Things: Mohammedia, Morocco City Landfill Case. Big Data Min. Anal. 2021, 4, 10–17. [Google Scholar] [CrossRef]
- Jo, J.; Jo, B.; Kim, J.; Kim, S.; Han, W. Development of an IoT-Based Indoor Air Quality Monitoring Platform. J. Sens. 2020, 2020, e8749764. [Google Scholar] [CrossRef]
- Suh, J.-H.; Cho, I.; Kang, K.; Kweon, S.-J.; Lee, M.; Yoo, H.-J.; Park, I. Fully Integrated and Portable Semiconductor-Type Multi-Gas Sensing Module for IoT Applications. Sens. Actuators B Chem. 2018, 265, 660–667. [Google Scholar] [CrossRef]
- Aashiq, M.N.M.; Kurera, W.T.C.C.; Thilekaratne, M.G.S.P.; Saja, A.M.A.; Rouzin, M.R.M.; Neranjan, N.; Yassin, H. An IoT-Based Handheld Environmental and Air Quality Monitoring Station. Acta IMEKO 2023, 12, 1–9. [Google Scholar] [CrossRef]
- Dash, R.K.; Cengiz, K.; Alshehri, Y.A.; Alnazzawi, N. A New and Reliable Intelligent Model for Deployment of Sensor Nodes for IoT Applications. Comput. Electr. Eng. 2022, 101, 107959. [Google Scholar] [CrossRef]
- Muhammad, S.; Tiang, J.J.; Roslee, M.; Waly, M.I.; Mallat, N.K.; Smida, A.; Iqbal, A. Advancing IoT Wireless Sensor Nodes with a Low Profile Multiband RF Rectifier Based on Multi-Stub J-Inverter Network. AEU Int. J. Electron. Commun. 2023, 171, 154869. [Google Scholar] [CrossRef]
- Meli, M.; Gatt, E.; Casha, O.; Grech, I.; Micallef, J. A Novel Low Power and Low Cost IoT Wireless Sensor Node for Air Quality Monitoring. In Proceedings of the 2020 27th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Glasgow, UK, 23–25 November 2020; pp. 1–4. [Google Scholar]
- Marques, G.; Pires, I.M.; Miranda, N.; Pitarma, R. Air Quality Monitoring Using Assistive Robots for Ambient Assisted Living and Enhanced Living Environments through Internet of Things. Electronics 2019, 8, 1375. [Google Scholar] [CrossRef]
- Chang, B.R.; Tsai, H.-F.; Lin, Y.-C.; Yin, T.-K. Unmanned Mobile Multipurpose Monitoring System—iMonitor. Sens. Mater. 2021, 33, 1457. [Google Scholar] [CrossRef]
- Das, T.; Jyoti Sut, D.; Gupta, V.; Gohain, L.; Kakoty, P.; Kakoty, N.M. A Mobile Robot for Hazardous Gas Sensing. In Proceedings of the 2020 International Conference on Computational Performance Evaluation (ComPE), Shillong, India, 2–4 July 2020; pp. 62–66. [Google Scholar]
- Norzam, W.A.S.; Hawari, H.F.; Kamarudin, K.; Juffry, Z.H.M.; Hussein, N.A.A.; Gupta, M.; Abdullah, A.N. Mobile Robot Gas Source Localization Using SLAM-GDM with a Graphene-Based Gas Sensor. Electronics 2023, 12, 171. [Google Scholar] [CrossRef]
- Gao, X.; Zhang, Q.; Li, M.; Lan, B.; Fu, X.; Li, J. Mobile Robot Combination Autonomous Behavior Strategy to Inspect Hazardous Gases in Relatively Narrow Man–Machine Environment. Chin. J. Mech. Eng. 2022, 35, 135. [Google Scholar] [CrossRef]
- Tiu, R.L.; Manuel, M.C.E.; Acosta, M.E.T.; Yap, R.C.P.; Arrozal, F.J.N.; Cruz, J.C.D.; Tud, R.C.; Verdadero, M.S. Development and Application of an Omni-Directional Robot for the Detection of Combustible and Toxic Gases. In Proceedings of the 2021 IEEE 13th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), Manila, Philippines, 28–30 November 2021; pp. 1–6. [Google Scholar]
- Xing, Y.; Vincent, T.A.; Fan, H.; Schaffernicht, E.; Hernandez Bennetts, V.; Lilienthal, A.J.; Cole, M.; Gardner, J.W. FireNose on Mobile Robot in Harsh Environments. IEEE Sens. J. 2019, 19, 12418–12431. [Google Scholar] [CrossRef]
- Joshna, V.; Kashyap, M.; Ananya, V.; Manitha, P.V. Fully Autonomous Robot to Detect and Degasify Hazardous Gas after Flood Disaster. In Proceedings of the 2019 2nd International Conference on Power and Embedded Drive Control (ICPEDC), Chennai, India, 21–23 August 2019; pp. 134–139. [Google Scholar]
- Park, J.; Jumu, F.; Power, J.; Richard, M.; Elsahli, Y.; Jarkas, M.A.; Ruan, A.; Luican-Mayer, A.; Ménard, J.-M. Drone-Mountable Gas Sensing Platform Using Graphene Chemiresistors for Remote In-Field Monitoring. Sensors 2022, 22, 2383. [Google Scholar] [CrossRef] [PubMed]
- Nooralishahi, P.; López, F.; Maldague, X. A Drone-Enabled Approach for Gas Leak Detection Using Optical Flow Analysis. Appl. Sci. 2021, 11, 1412. [Google Scholar] [CrossRef]
- Gas Sensor BME680. Available online: https://www.bosch-sensortec.com/products/environmental-sensors/gas-sensors/bme680/ (accessed on 7 November 2023).
- SGP41—VOC and NOx Sensor for Smartly Regulating Air Treatment Devices. Available online: https://sensirion.com/products/catalog/SGP41/ (accessed on 17 October 2022).
- ENS16x Digital Metal-Oxide Multi-Gas Sensor Family. Available online: https://www.sciosense.com/ens16x-digital-metal-oxide-multi-gas-sensor-family/ (accessed on 24 January 2024).
- Hydrogen Sensor for Fuel Cell and Safety Applications-PGS1000—Posifa Technologies. Available online: https://posifatech.com/pgs1000/ (accessed on 24 December 2022).
- MS580305BA01-00: MEAS Board Mount Pressure Sensors. Available online: https://www.te.com/usa-en/product-MS580305BA01-00.html (accessed on 7 November 2023).
- Boxmover Line—SEITO—Partner of Asti Mobile Robotics. Available online: https://asti.seito.pl/portfolio/boxmover-line/ (accessed on 24 January 2024).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | BME680 [26] | SGP41 [27] | ENS160 [28] | PGS1004 [29] | MS5803-05BA [30] |
|---|---|---|---|---|---|
| Supply (V) | 1.7–3.6 | 1.7–3.6 | 1.8–3.6 | 5 | 1.8–3.6 |
| Parameters | IAQ, TVOC, CO2, temperature, relative humidity, pressure | IAQ-Index, NOx-Index | IAQ, TVOC | Hydrogen in air | Atmospheric pressure, temperature |
| Buses | I2C and SPI | I2C | I2C and SPI | I2C | I2C and SPI |
| Size (mm3) | 3.0 × 3.0 × 0.93 | 2.44 × 2.44 × 0.9 | 3.0 × 3.0 × 0.9 | 23 × 20 × 10 | 6.4 × 6.2 × 2.88 |
| Response time | 1 s | 1 s | 1 s | 1.4 s | 1 s |
| Structure | MEMS | MOX | MOX | MEMS | MEMS |
| Manufacturer | Bosch Sensortec GmbH | Sensirion AG | Sciosense B.V. | Posifa Technologies | TE connectivity |
| Substance | BME680 40 cm | BME680 100 cm | ENS160 40 cm | ENS160 100 cm | SGP41 40 cm | SGP41 100 cm |
|---|---|---|---|---|---|---|
| Ammonia | ≥50 μL | ≥500 μL | ≥100 μL | ≥500 μL | ≥500 μL | ≥1000 μL |
| Benzene | ≥500 μL | — | — | — | ≥50 μL | ≥100 μL |
| Butanol | ≥100 μL | ≥500 μL | — | — | ≥100 μL | ≥300 μL |
| Pentane | ≥300 μL | ≥1000 μL | — | — | ≥50 μL | ≥50 μL |
| Phenol | ≥50 μL | ≥100 μL | — | — | ≥50 μL | ≥50 μL |
| Tetrahydrofuran | ≥50 μL | ≥50 μL | ≥50 μL | ≥50 μL | ≥50 μL | ≥50 μL |
| Xylene | ≥300 μL | ≥500 μL | ≥500 μL | — | ≥50 μL | ≥100 μL |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Okby, M.F.R.; Junginger, S.; Roddelkopf, T.; Huang, J.; Thurow, K. Ambient Monitoring Portable Sensor Node for Robot-Based Applications. Sensors 2024, 24, 1295. https://doi.org/10.3390/s24041295
Al-Okby MFR, Junginger S, Roddelkopf T, Huang J, Thurow K. Ambient Monitoring Portable Sensor Node for Robot-Based Applications. Sensors. 2024; 24(4):1295. https://doi.org/10.3390/s24041295
Chicago/Turabian StyleAl-Okby, Mohammed Faeik Ruzaij, Steffen Junginger, Thomas Roddelkopf, Jiahao Huang, and Kerstin Thurow. 2024. "Ambient Monitoring Portable Sensor Node for Robot-Based Applications" Sensors 24, no. 4: 1295. https://doi.org/10.3390/s24041295
APA StyleAl-Okby, M. F. R., Junginger, S., Roddelkopf, T., Huang, J., & Thurow, K. (2024). Ambient Monitoring Portable Sensor Node for Robot-Based Applications. Sensors, 24(4), 1295. https://doi.org/10.3390/s24041295