


Artificial Potential Field Based Trajectory Tracking for Quadcopter UAV Moving Targets


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
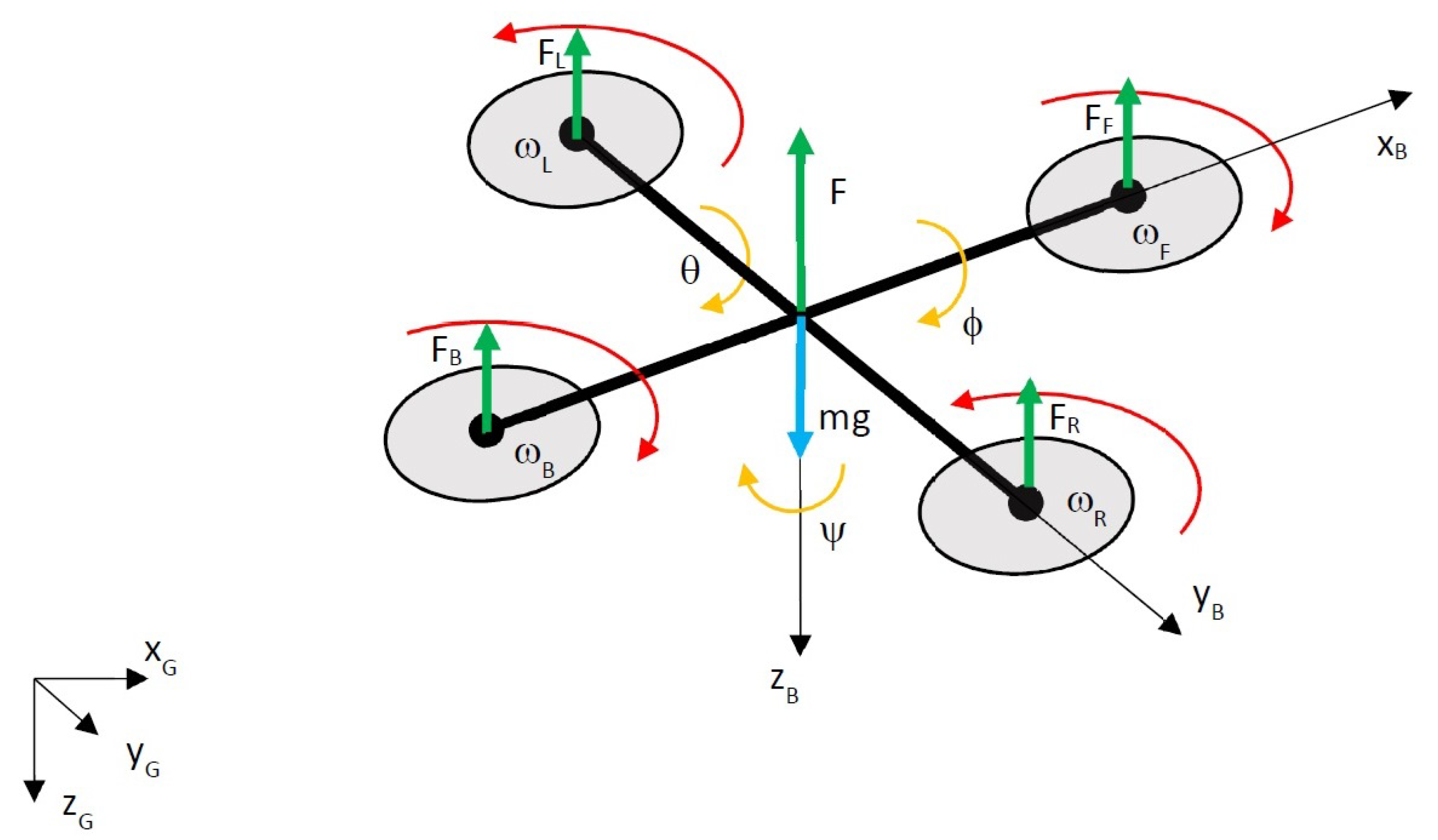
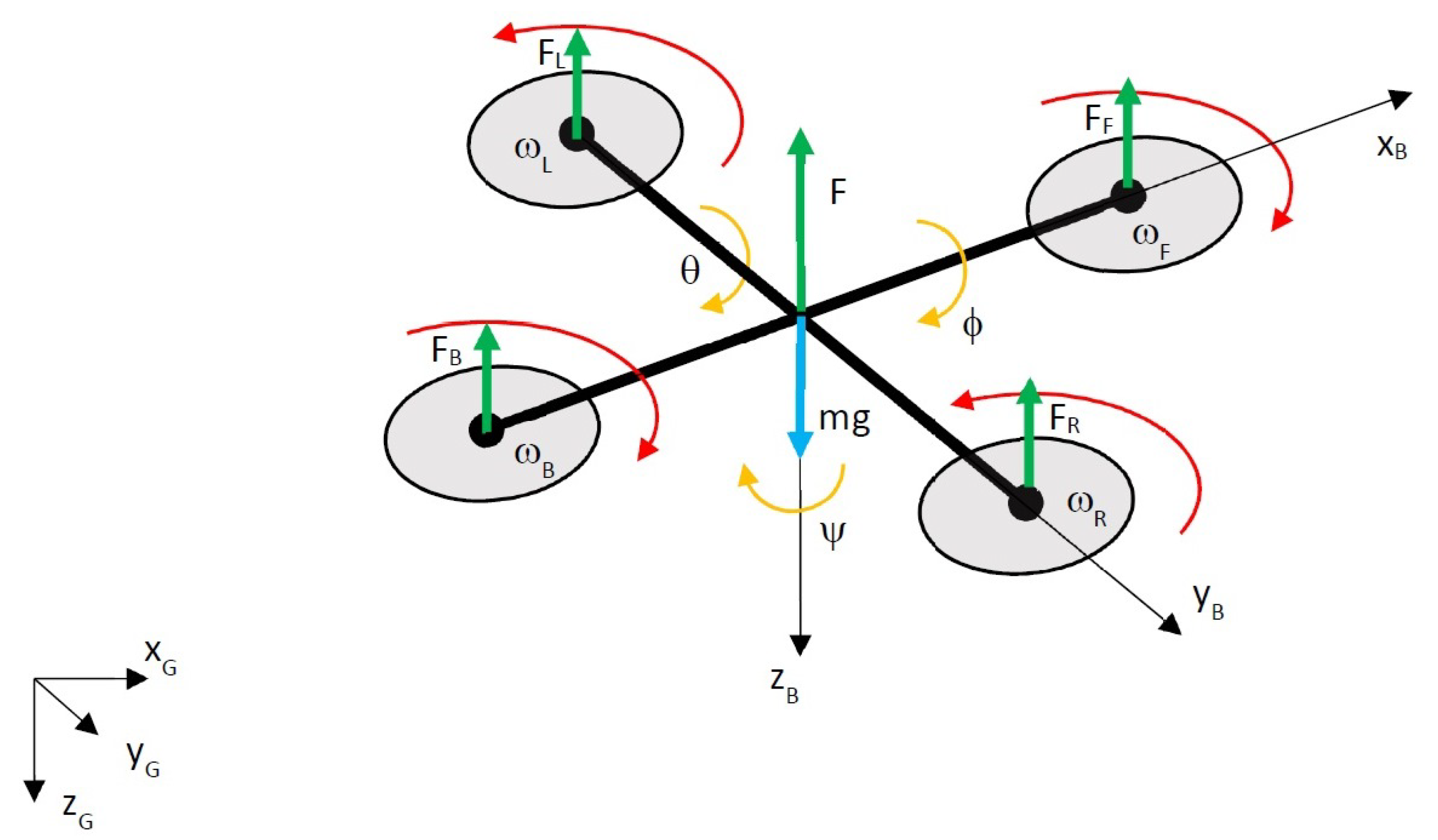
2. Quadcopter Dynamics (AR Drone)
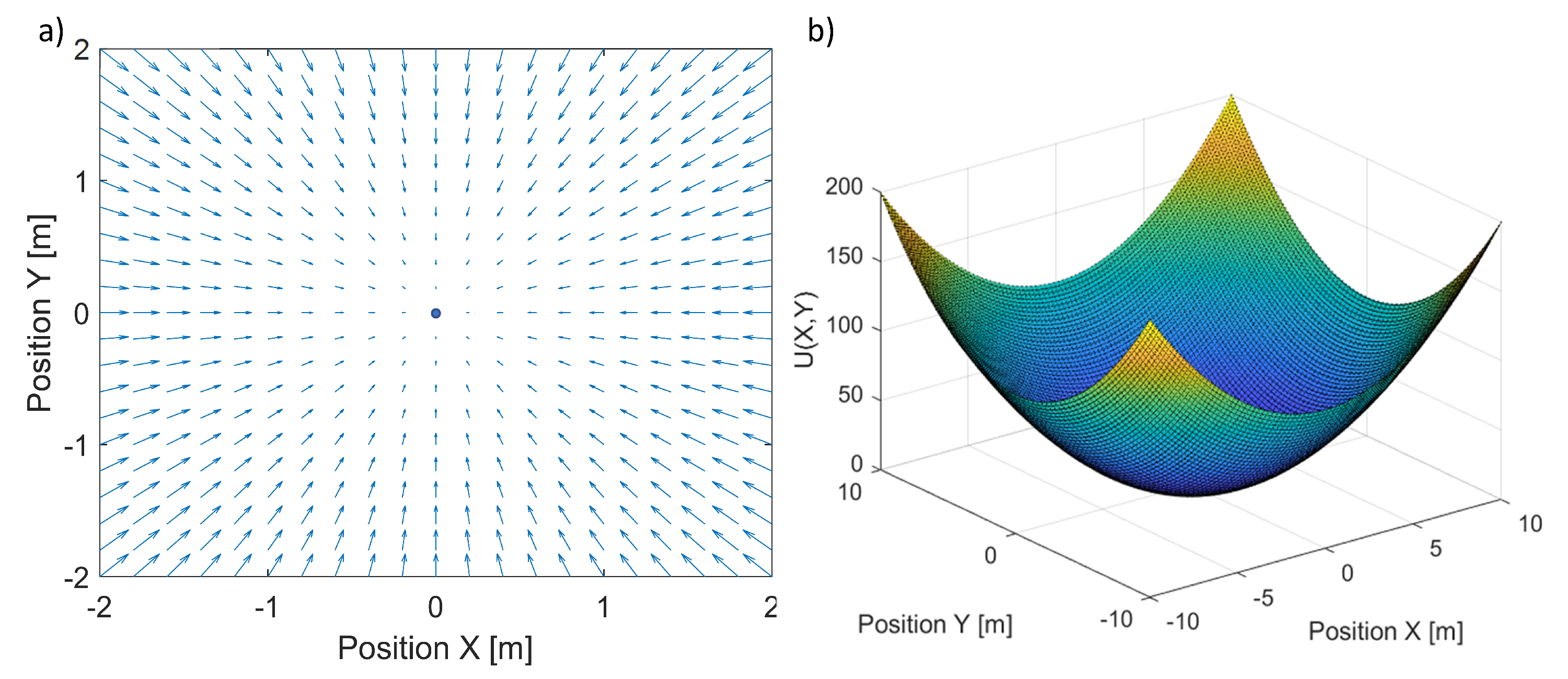
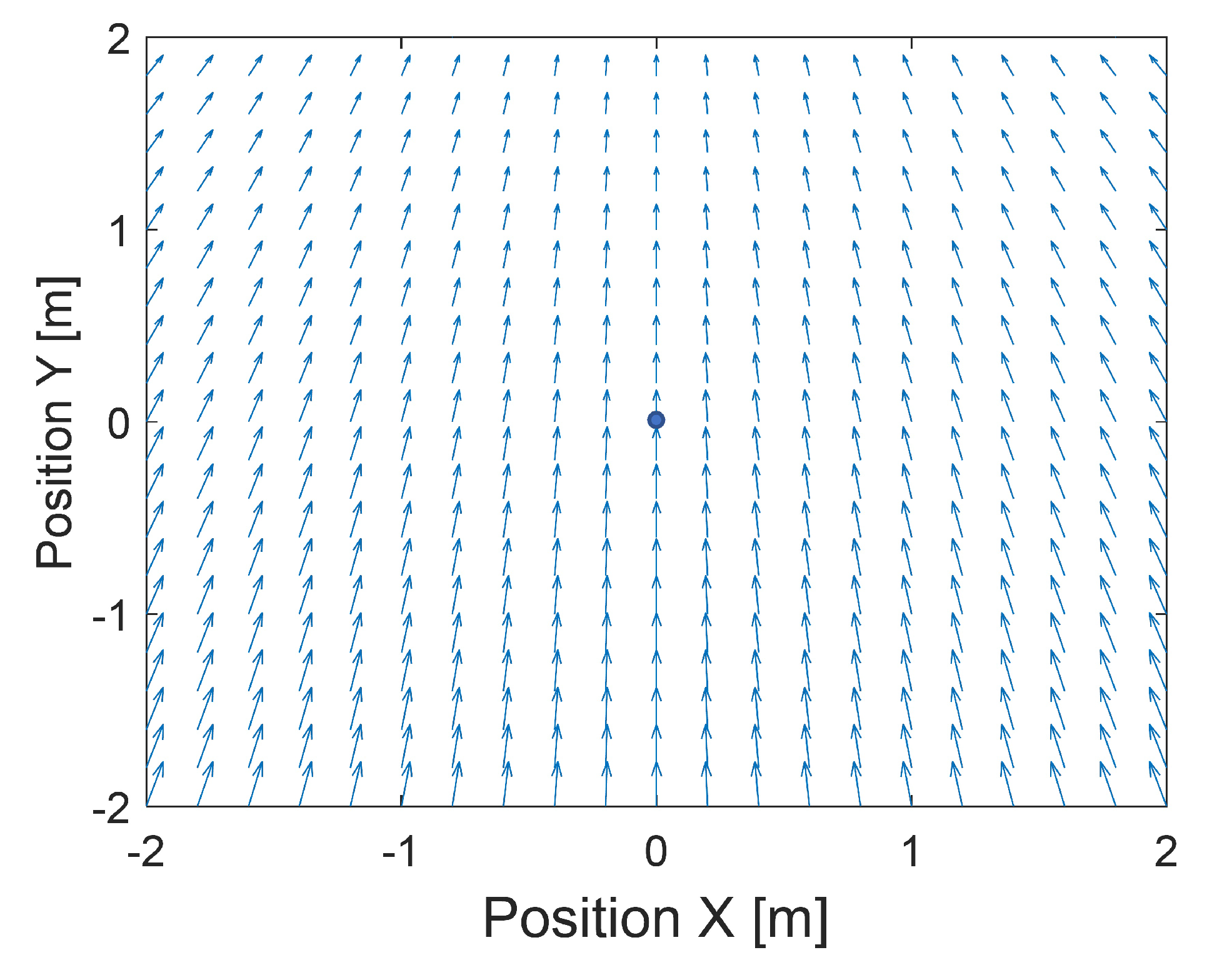
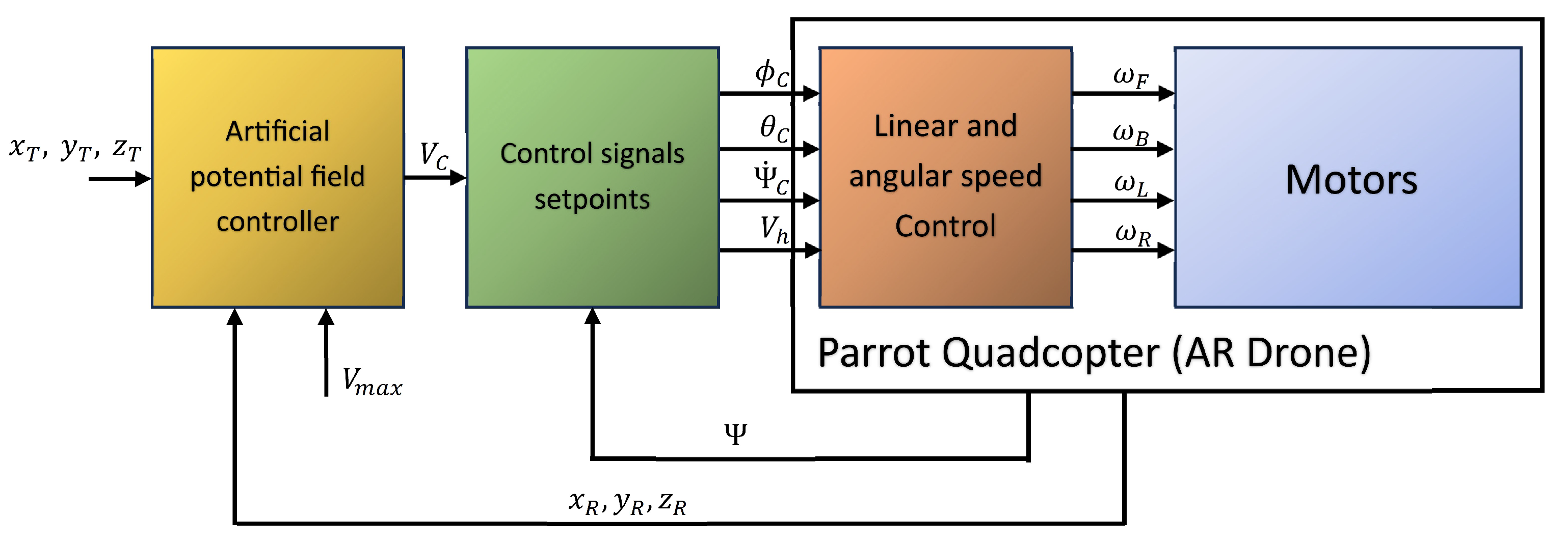
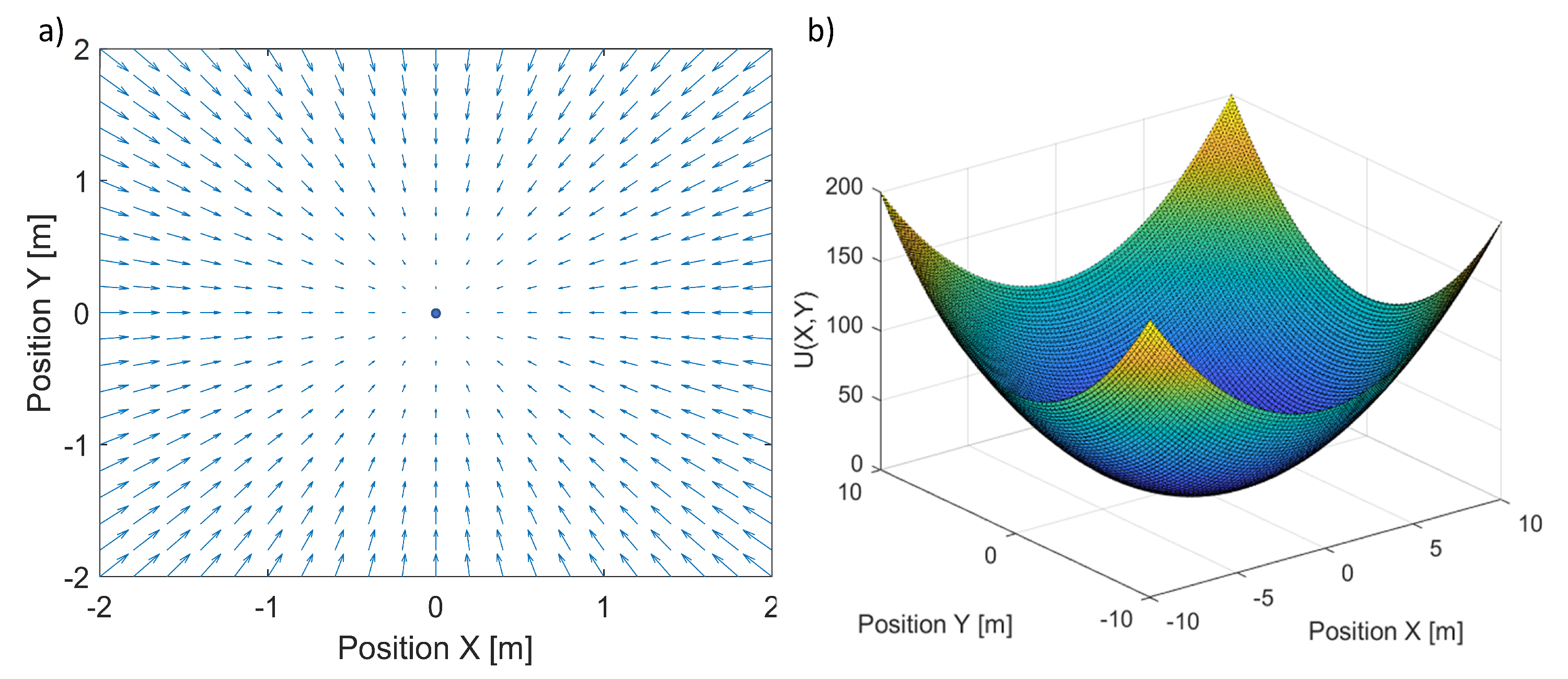
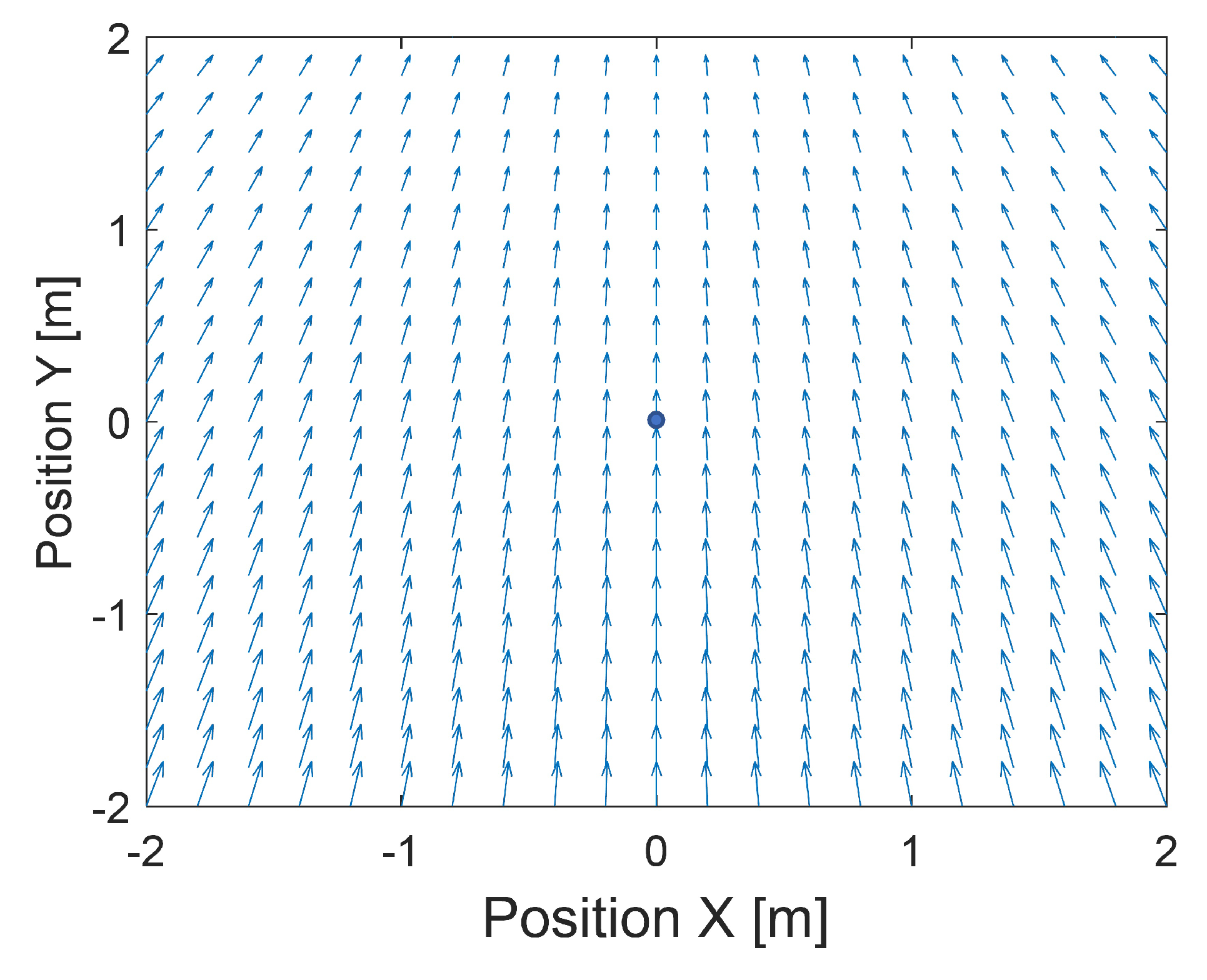
3. Artificial Potential Field and Quadcopter Control
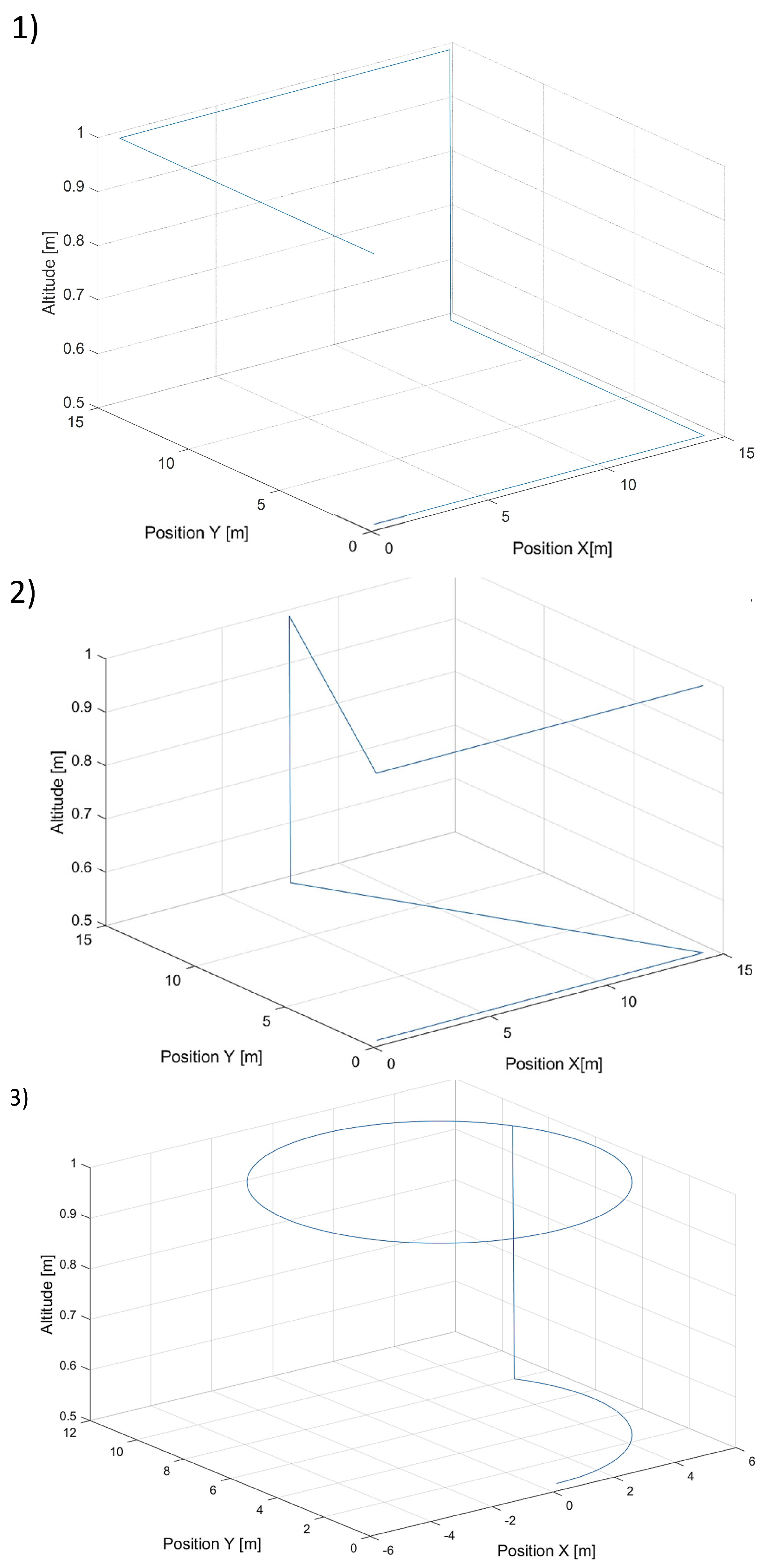
4. Simulation Scenarios and Results
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhengtian, W.; Jinyu, D.; Baoping, J.; Hamid, R.K. Robot path planning based on artificial potential field with deterministic annealing. ISA Trans. 2023, 138, 74–87. [Google Scholar]
- Huang, T.; Fan, K.; Sun, W.; Li, W.; Guo, H. Potential-Field-RRT: A Path-Planning Algorithm for UAVs Based on Potential-Field-Oriented Greedy Strategy to Extend Random Tree. Drones 2023, 7, 331. [Google Scholar] [CrossRef]
- Wu, Z.; Dong, S.; Yuan, M.; Cui, J.; Zhao, L.; Tong, C. Rotate artificial potential field algorithm toward 3D real-time path planning for unmanned aerial vehicle. Proc. Inst. Mech. Eng. Part J. Aerosp. Eng. 2023, 237, 940–955. [Google Scholar] [CrossRef]
- Hao, G.; Lv, Q.; Huang, Z.; Zhao, H.; Chen, W. UAV Path Planning Based on Improved Artificial Potential Field Method. Aerospace 2023, 10, 562. [Google Scholar] [CrossRef]
- Fang, Y.; Yao, Y.; Zhu, F.; Chen, K. Piecewise-potential-field-based path planning method for fixed-wing UAV formation. Sci. Rep. 2023, 13, 2234. [Google Scholar] [CrossRef] [PubMed]
- Yin, H.; Cam, L.L.; Roy, U. Formation control for multiple unmanned aerial vehicles in constrained space using modified artificial potential field. Math. Model. Eng. Probl. 2017, 4, 100–105. [Google Scholar] [CrossRef]
- Kownacki, C.; Ambroziak, L. Local and asymmetrical potential field approach to leader tracking problem in rigid formations of fixed-wing UAVs. Aerosp. Sci. Technol. 2017, 68, 465–474. [Google Scholar] [CrossRef]
- Kownacki, C.; Ambroziak, L. Asymmetrical Artificial Potential Field as Framework of Nonlinear PID Loop to Control Position Tracking by Nonholonomic UAVs. Sensors 2022, 22, 5474. [Google Scholar] [CrossRef] [PubMed]
- Budiyanto, A.; Cahyadi, A.; Adji, T.B.; Wahyunggoro, O. UAV obstacle avoidance using potential field under dynamic environment. In Proceedings of the 2015 International Conference on Control, Electronics, Renewable Energy and Communications (ICCEREC), Bandung, Indonesia, 27–29 August 2015; pp. 187–192. [Google Scholar] [CrossRef]
- Batinovic, A.; Goricanec, J.; Markovic, L.; Bogdan, S. Path Planning with Potential Field-Based Obstacle Avoidance in a 3D Environment by an Unmanned Aerial Vehicle. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 394–401. [Google Scholar] [CrossRef]
- Sun, Z.; Li, S.; Hong, Y.; Chen, B. Obstacle-avoidance path planning and tracking control of an autonomous vehicle. In Proceedings of the 2022 IEEE 17th International Conference on Control & Automation (ICCA), Naples, Italy, 27–30 June 2022; pp. 927–931. [Google Scholar] [CrossRef]
- Zhao, Y.; Hao, L.-Y.; Wu, Z.-J. Obstacle Avoidance Control of Unmanned Aerial Vehicle with Motor Loss-of-Effectiveness Fault Based on Improved Artificial Potential Field. Sustainability 2023, 15, 2368. [Google Scholar] [CrossRef]
- Yang, Y.; Xiong, X.; Yan, Y. UAV Formation Trajectory Planning Algorithms: A Review. Drones 2023, 7, 62. [Google Scholar] [CrossRef]
- Corcuera, J.J.N.; Boullosa, M.S.; del Pozo, L. Trajectory Planning for Moving Target Tracking from a UAV. In Proceedings of the 2019 20th International Radar Symposium (IRS), Ulm, Germany, 26–28 June 2019; pp. 1–12. [Google Scholar] [CrossRef]
- Shi, H.R.; Lu, F.X.; Wu, L.; Xia, J.W. Trajectory Optimization of Multi-UAVs for Marine Target Tracking during Approaching Stage. Math. Probl. Eng. 2022, 2022, 5472105. [Google Scholar] [CrossRef]
- Wei, H. A UAV Target Prediction and Tracking Method Based on KCF and Kalman Filter Hybrid Algorithm. In Proceedings of the 2022 2nd International Conference on Consumer Electronics and Computer Engineering (ICCECE), Guangzhou, China, 14–16 January 2022; pp. 711–718. [Google Scholar] [CrossRef]
- Wu, K.; Cai, Z.; Zhao, J.; Wang, Y. Target Tracking Based on a Nonsingular Fast Terminal Sliding Mode Guidance Law by Fixed-Wing UAV. Appl. Sci. 2017, 7, 333. [Google Scholar] [CrossRef]
- Vílez, P.; Certad, N.; Ruiz, E. Trajectory Generation and Tracking Using the AR.Drone 2.0 Quadcopter UAV. In Proceedings of the 2015 12th Latin American Robotics Symposium and 2015 3rd Brazilian Symposium on Robotics (LARS-SBR), Uberlandia, Brazil, 29–31 October 2015; pp. 73–78. [Google Scholar] [CrossRef]
- Basri, M.A.M. Trajectory Tracking of a Quadcopter UAV using PID Controller. Elektr.-J. Electr. Eng. 2023, 22, 14–21. [Google Scholar] [CrossRef]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kownacki, C. Artificial Potential Field Based Trajectory Tracking for Quadcopter UAV Moving Targets. Sensors 2024, 24, 1343. https://doi.org/10.3390/s24041343
Kownacki C. Artificial Potential Field Based Trajectory Tracking for Quadcopter UAV Moving Targets. Sensors. 2024; 24(4):1343. https://doi.org/10.3390/s24041343
Chicago/Turabian StyleKownacki, Cezary. 2024. "Artificial Potential Field Based Trajectory Tracking for Quadcopter UAV Moving Targets" Sensors 24, no. 4: 1343. https://doi.org/10.3390/s24041343
APA StyleKownacki, C. (2024). Artificial Potential Field Based Trajectory Tracking for Quadcopter UAV Moving Targets. Sensors, 24(4), 1343. https://doi.org/10.3390/s24041343