
A Low-Noise Amplifier for Submarine Electric Field Signal Based on Chopping Amplification Technology


Abstract
:1. Introduction
2. Chopper Amplifier Circuit Principle
3. Simulation of the Chopper Amplifier Circuit
3.1. Gain Measurement
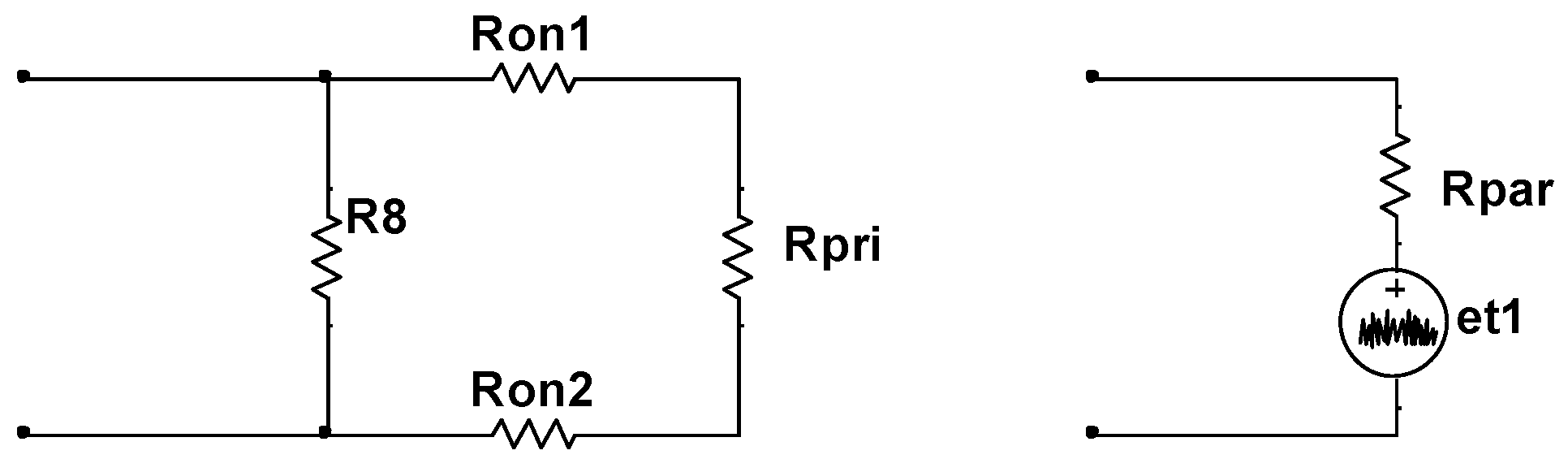
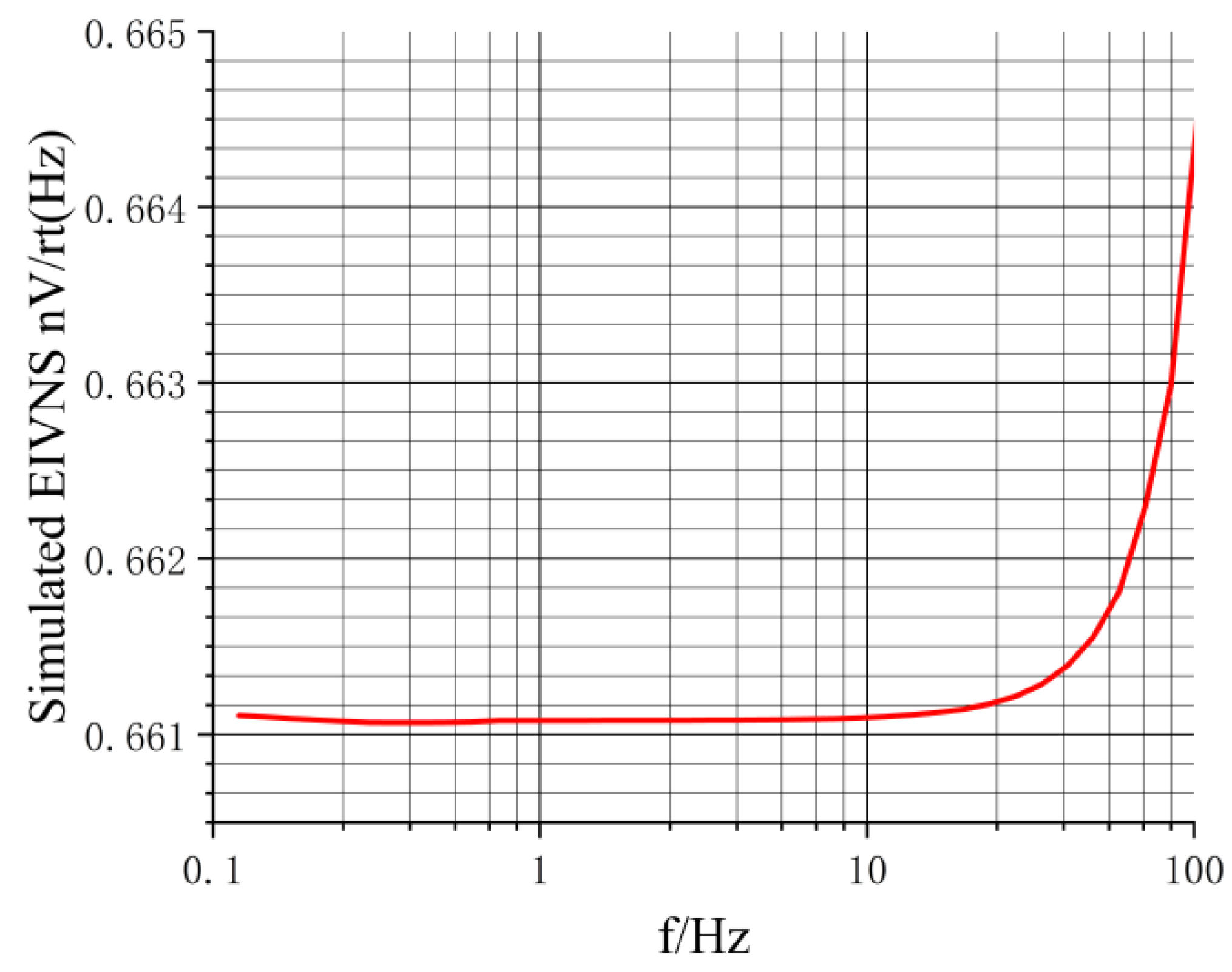
3.2. Estimation of Theoretical Equivalent Input Noise Spectral Density
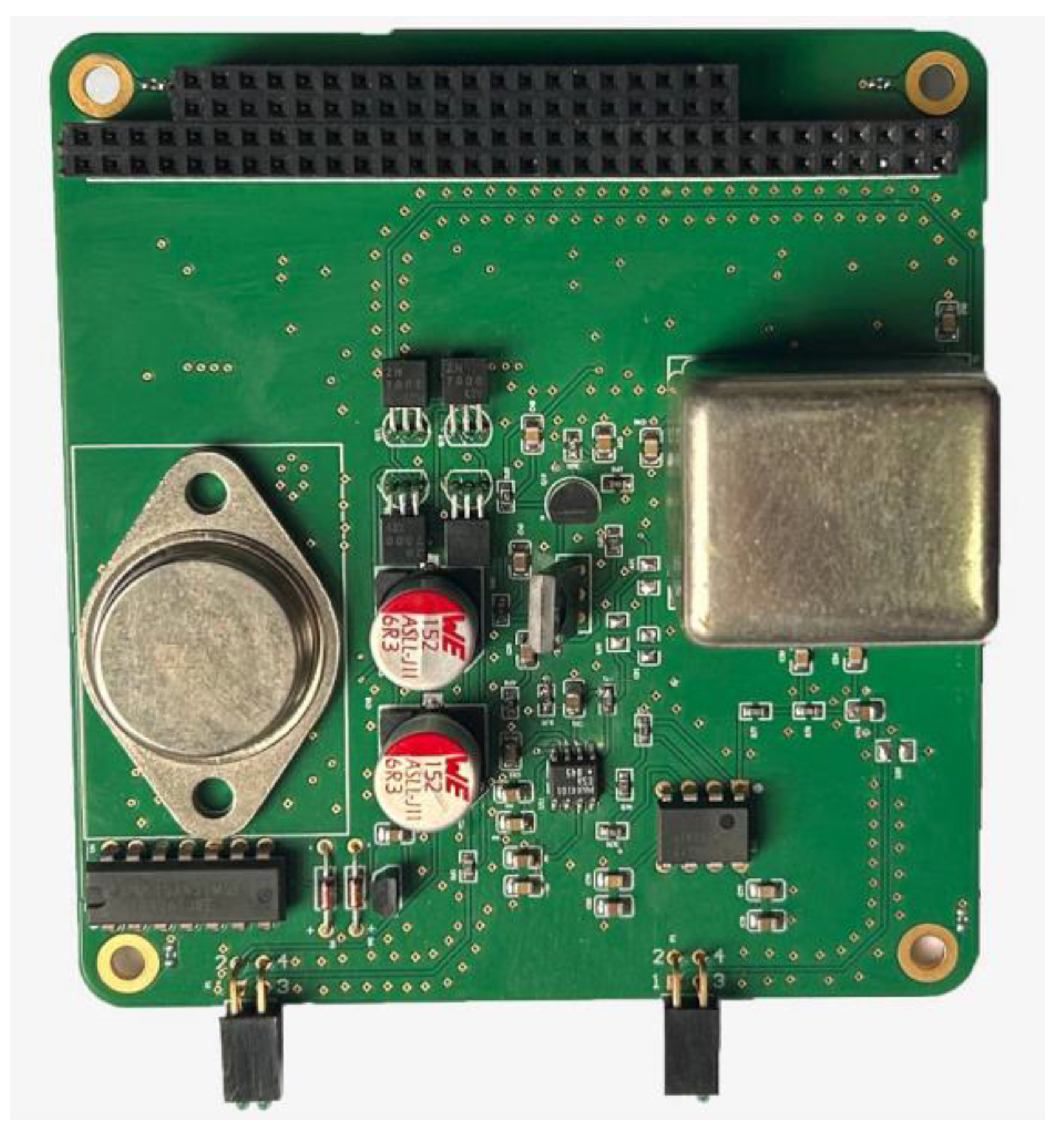
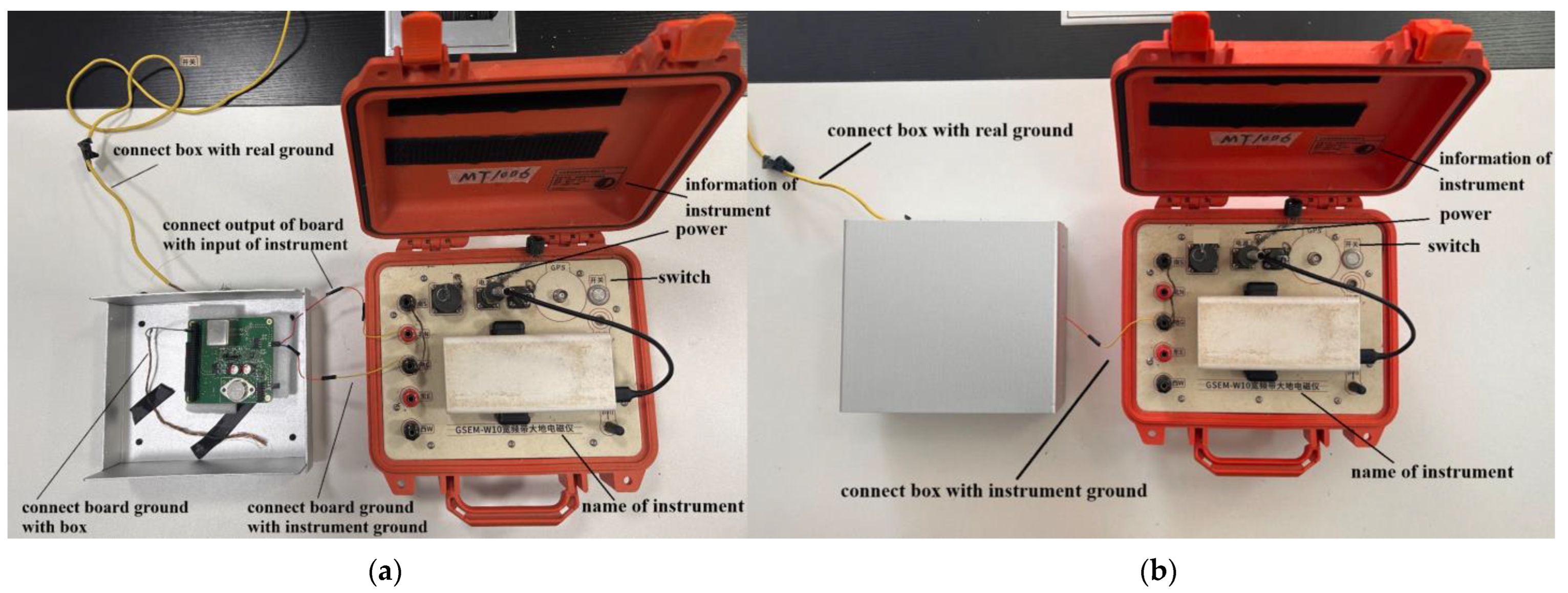
4. Measurement of the Chopper Amplifier Circuit
4.1. Gain Measurement
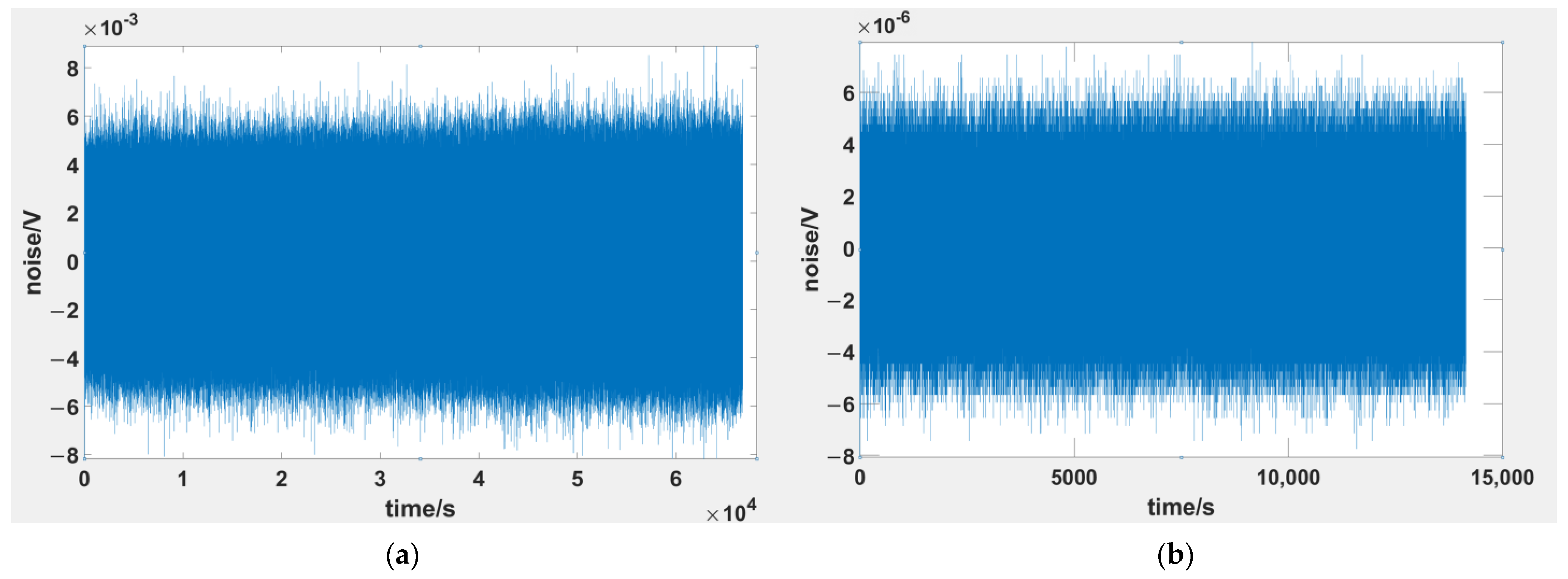
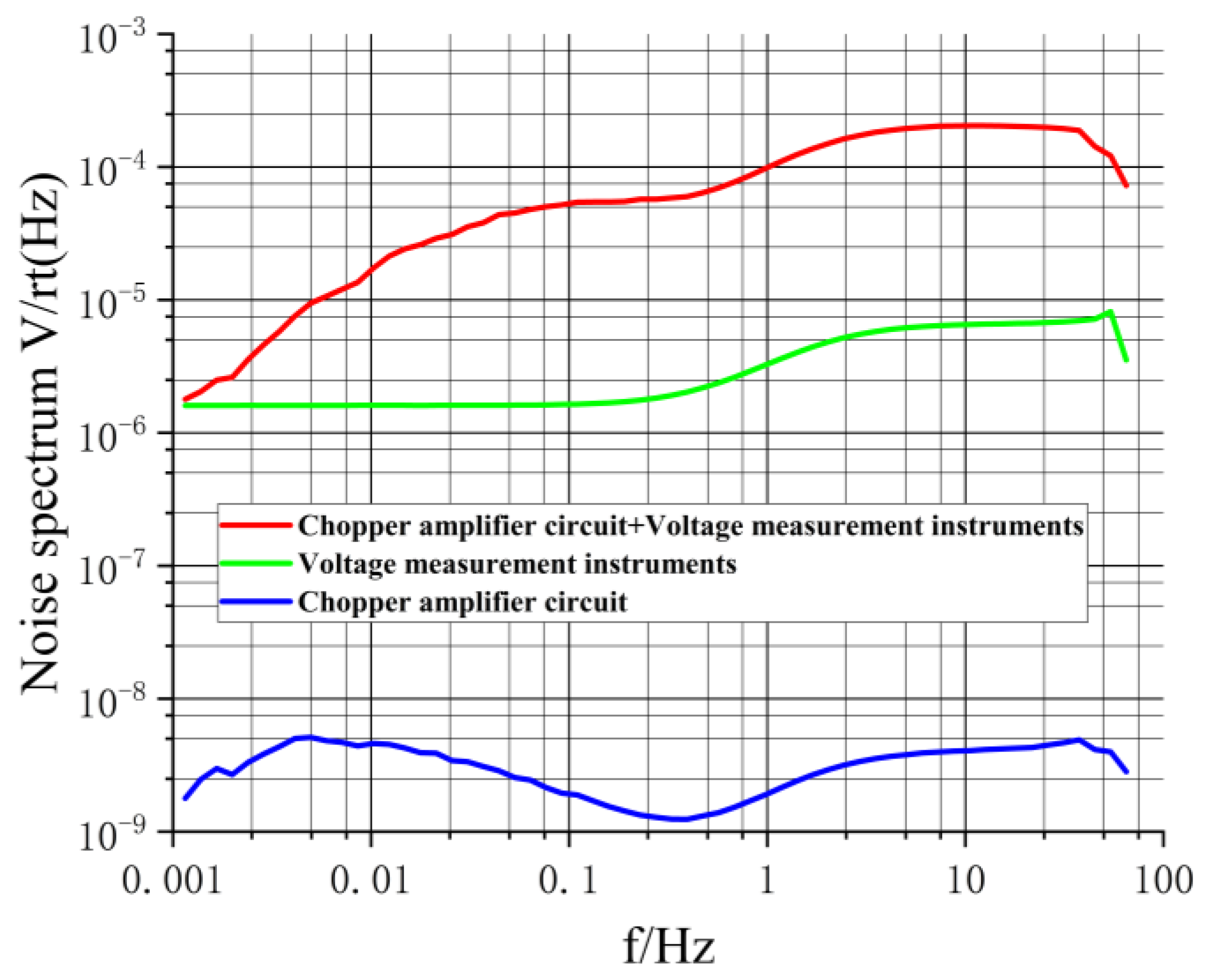
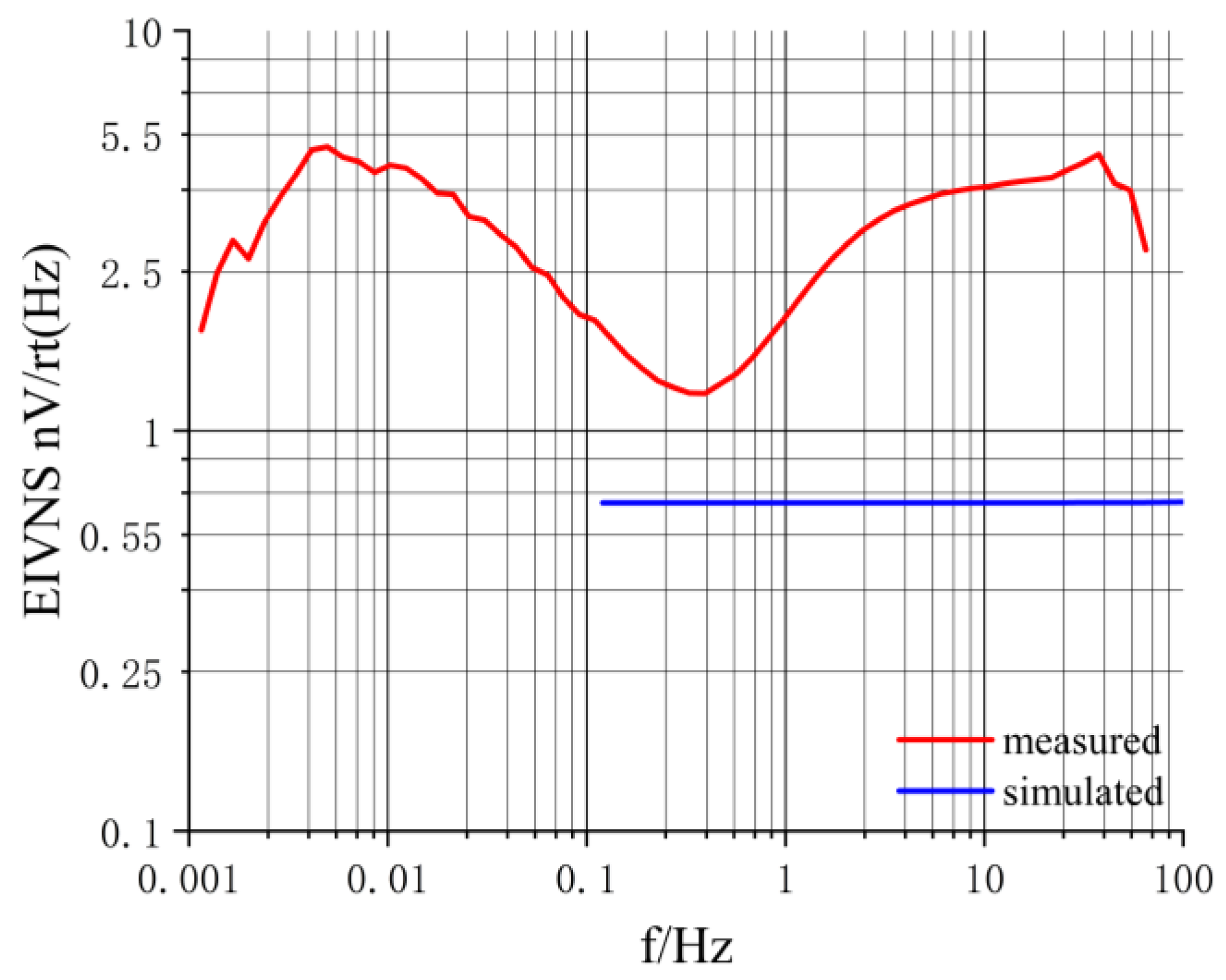
4.2. Measurement of EIVNS
5. Discussion and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviation
| Simple description for symbols | ||
| Mnemonic | Description | Unit |
| EIVNS | equivalent input voltage noise spectrum | |
| input signal of chopper amplifier circuit | V | |
| signal modulated | V | |
| magnification of transformer | ||
| magnification of amplification module | ||
| signal used to modulate | V | |
| signal used to demodulate | V | |
| offset generated from amplification module | V | |
| noise generated from amplification module | V | |
| signal demodulated | V | |
| demodulated | V | |
| demodulated | V | |
| filtered | V | |
| filtered | V | |
| frequency of or | kHz | |
| estimation value of equivalent input noise spectral density | ||
| experimental value of equivalent input noise spectral density | ||
| source of input signal in Multisim | V | |
| noise bandwidth | ||
| Boltzmann constant | J/K | |
| temperature | K | |
| RMS of noise voltage from modulation | nV | |
| RMS of noise voltage from transformer | nV | |
| RMS of noise voltage from amplification | nV | |
| RMS of noise voltage from demodulation | nV | |
| RMS of noise voltage from filter | nV | |
| magnification of chopper amplifier in simulation | ||
| magnification of chopper amplifier in experimentation | ||
References
- Lv, J.; Chen, K.; Su, J. Electromagnetic Fields in the Ocean and Their Applications, 1st ed.; Shanghai Scientific and Technical Publisher: Shanghai, China, 2020; pp. 32–33. [Google Scholar]
- Kim, Y.; Jo, G.; Jung, H. Real-Time Detection of Electric Field Signal of a Moving Object Using Adjustable Frequency Bands and Statistical Discriminant for Underwater Defense. IEEE. Trans. Geosci. Remote Sens. 2022, 60, 5802708. [Google Scholar] [CrossRef]
- Cho, S.; Jung, H.; Lee, H.; Rim, H.; Lee, S. Real-Time Underwater Object Detection Based on DC Resistivity Method. IEEE. Trans. Geosci. Remote Sens. 2016, 54, 6833–6842. [Google Scholar] [CrossRef]
- Tian, X.; Yang, J.; Han, C.; Kong, M.; Li, W. Current Status and Prospects of International Marine Mineral Resource Exploration and Mining Technology. Mar. Inf. 2021, 36, 28–32. [Google Scholar]
- Bhuiyan, A.; Vesterås, E.; McKay, A. Frontier Exploration Using a Towed Streamer EM System—Barents Sea Examples. In Proceedings of the SEG Technical Program Expanded Abstracts 2015, New Orleans, LA, USA, 19 August 2015. [Google Scholar]
- Constable, S.C.; Srnka, L.J. An Introduction to Marine Controlled-Source Electromagnetic Methods for Hydrocarbon Exploration. Geophysics 2007, 72, WA3–WA12. [Google Scholar] [CrossRef]
- Liu, C.; Jing, J.; Zhao, Q.; Luo, X.; Chen, K.; Wang, M.; Deng, M. High-Resolution Resistivity Imaging of a Transversely Uneven Gas Hydrate Reservoir: A Case in the Qiongdongnan Basin, South China Sea. Remote Sens. 2023, 15, 2000. [Google Scholar] [CrossRef]
- Zhu, Z.; Tao, C.; Shen, J.; Revil, A.; Deng, X.; Liao, S.; Zhou, J.; Wang, W.; Nie, Z.; Yu, J. Self-Potential Tomography of a Deep-Sea Polymetallic Sulfide Deposit on Southwest Indian Ridge. JGR Solid Earth 2020, 125, e2020JB019738. [Google Scholar] [CrossRef]
- Johansen, S.E.; Panzner, M.; Mittet, R.; Amundsen, H.E.F.; Lim, A.; Vik, E.; Landrø, M.; Arntsen, B. Deep Electrical Imaging of the Ultraslow-Spreading Mohns Ridge. Nature 2019, 567, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Naif, S.; Key, K.; Constable, S.; Evans, R.L. Melt-Rich Channel Observed at the Lithosphere–Asthenosphere Boundary. Nature 2013, 495, 356–359. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Baba, K.; Liang, P.; Shimizu, H.; Utada, H. The 2011 Tohoku Tsunami Observed by an Array of Ocean Bottom Electromagnetometers. Geophys. Res. Lett. 2014, 41, 4937–4944. [Google Scholar] [CrossRef]
- He, J.S. Principles of Marine Electromagnetic Method, 1st ed.; Higher Education Press: Beijing, China, 2012; pp. 5–6. [Google Scholar]
- Palshin, N.A. Oceanic Electromagnetic Studies: A Review. Surv. Geophys. 1996, 17, 455–491. [Google Scholar] [CrossRef]
- Deng, M.; Zhang, Q.S.; Qiu, K.L. Several Technical Issues in Geoelectric Field Exploration in Marine Environment. Instrum. Technol. Sens. 2004, 9, 48–50. [Google Scholar]
- Filloux, J.H. Electric Field Recording on the Sea Floor with Short Span Instruments. J. Geomagn. Geoelectr. 1974, 26, 269–279. [Google Scholar] [CrossRef]
- Deng, M.; Bai, Y.C.; Chen, R.J.; Li, Z.; Xiao, J.P.; Deng, J.W. The Application of PC104 in Sea-Floor Magnetotelluric Signal Acquisition. J. Cent. South Univ. Technol. 2002, 33, 555–558. [Google Scholar]
- Enz, C.C.; Vittoz, E.A.; Krummenacher, F. A CMOS Chopper Amplifier. IEEE J. Solid-State Circuits 1987, 22, 335–342. [Google Scholar] [CrossRef]
- Constable, S.C. Review Paper: Instrumentation for Marine Magnetotelluric and Controlled Source Electromagnetic Sounding. Geophys. Prospect. 2013, 61, 505–532. [Google Scholar] [CrossRef]
- Constable, S.C. Seafloor Magnetotelluric System and Method for Oil Exploration 1998. U.S. Patent 5770945A, 23 June 1998. [Google Scholar]
- Liu, L.; Zhou, Y.; Chen, J. Design of Ultra Low Noise Synchronous Acquisition System for Marine Electromagnetic Signals. Mod. Electr. Technol. 2022, 45, 17–22. [Google Scholar]
- Chen, K.; Jing, J.E.; Zhao, Q.X.; Luo, X.H.; Tu, G.H.; Wang, M. Ocean Bottom EM Receiver and Application for Gas-Hydrate Detection. Chin. J. Geophys. 2017, 60, 4262–4272. [Google Scholar]
- Chen, R.J.; Bai, Y.C.; Cui, Y.L.; Ming, D. Testing Method for Ocean-Bottom Magnetotelluric Instrument. J. Cent. South Univ. Technol. 2002, 33, 344–347. [Google Scholar]
- Su, N.N. Design of Low Noise Operational Amplifier for Hall Sensor Readout Circuit. Master’s Thesis, North China University of Technology, Beijing, China, 2017. [Google Scholar]
- Wang, S.J.; Yan, F.X.; Sun, Y.S.; Zhang, Y.; Lin, J. Research on Low Noise Chopping Amplifier Circuit Based on Feedback Regulation. In Proceedings of the 10th International Conference on Environmental and Engineering Geophysics, Beijing, China, 7–12 June 2023. [Google Scholar]
- Gao, J.Z. Detection of Weak Signals, 2nd ed.; Tsinghua University Press: Beijing, China, 2011. [Google Scholar]
- Li, J.W.; Xi, Z.Z.; Chen, X.P.; Wang, H.; Long, X.; Zhou, S.; Wang, L. Ultralow Noise Low Offset Chopper Amplifier for Induction Coil Sensor to Detect Geomagnetic Field of 1 mHz to 1 kHz. J. Environ. Eng. Geophys. 2020, 25, 497–511. [Google Scholar] [CrossRef]
- Zhang, X.X.; Xu, J.; Han, J. Multisim 14 Electronic System Simulation and Design, 2nd ed.; China Machine Press: Beijing, China, 2017; pp. 213–214. [Google Scholar]
- Hua, C.Y.; Tong, S.B. Fundamentals of Analog Electronic Technology, 4th ed.; Higher Education Press: Beijing, China, 2006; pp. 75–76. [Google Scholar]
- Wang, H.F.; Deng, M.; Chen, K. New Progress of Ocean Bottom Electromagnetic Receiver. Geophys. Geochem. Explor. 2016, 40, 809–815. [Google Scholar]
- Wang, Z.D.; Deng, M.; Chen, K.; Wang, M. An Ultra-Noise Ag/AgCl Electric Field Sensor with Good Stability for Marine EM Applications. In Proceedings of the 2013 Seventh International Conference on Sensing Technology, Wellington, New Zealand, 3 December 2013. [Google Scholar]
- Li, J.S.; Wang, Y.Z.; Ji, C.; Liu, F.; Shi, J.Q.; Chen, S.Y.; Chen, C. Research on Low Noise and Low Offset Chopper Amplifying Circuit Used in Geomagnetic Disturbance. Instr. Techn. Sens. 2020, 4, 107–112. [Google Scholar]
- Chen, R.J.; He, Z.X.; He, L.F.; Liu, X.J. Random Noise and Coherent Interference Estimation of MT Instrument. In Proceedings of the 2008 International Conference on Computer and Electrical Engineering, Phuket, Thailand, 20–22 December 2008. [Google Scholar]
- Luo, X.H.; Deng, M.; Qiu, N.; Sun, Z.; Wang, M.; Jin, J.E.; Chen, K. MicrOBEM: A Micro-Ocean-Bottom Electromagnetic Receiver. Geophys. Geochem. Explor. 2022, 46, 544–549. [Google Scholar]
- Wang, Z.D.; Deng, M.; Chen, K.; Wang, M.; Zhang, Q.; Zeng, D. Development and Evaluation of an Ultralow-Noise Sensor System for Marine Electric Field Measurements. Sens. Actuators A 2014, 213, 70–78. [Google Scholar] [CrossRef]
- Chen, R.J.; Bai, Y.C.; Deng, M. Data Acquisition Software for Ocean-Bottom Magnetotelluric Instrument. J. Cent. South Univ. Technol. 2002, 33, 111–115. [Google Scholar]
- Chen, K.; Luo, X.H.; Su, J.Y.; Sun, Z.; Tian, J.; Deng, X.M. Overview of Research on Underwater Electric Field Measurement Technology. J. Unmanned Undersea Syst. 2023, 31, 527–544. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electronic Components | Operation Temperature |
|---|---|
| U4(AD3554SM) | −25–85 °C |
| U3(CD4069UBE) | −55–125 °C |
| Q2Q3Q4Q5(2N7000) | −55–150 °C |
| Q6(2SK170) | −55–125 °C |
| Q7(2N4918G) | −65–150 °C |
| U7(MAX4101ESA) | −40–85 °C |
| Q1(2SK330) | −55–125 °C |
| U1A(TL032AIP) | −40–85 °C |
| RMS of Voltage | Source | Magnification | Value/nV |
|---|---|---|---|
| Modulation | 1 | 4.1879 | |
| Transformer | 17.3660 | ||
| Amplification | 9.5215 | ||
| Demodulation | 657.8652 | ||
| Filter | 606.9000 |
| ) | ||||
|---|---|---|---|---|
| Frequency/Hz | Ours | SIO | OUC | CUG |
| 0.001 | 2.0 | 2.1 | 100.0 | 3.0 |
| 0.01 | 4.5 | 2.1 | 80.0 | 2.5 |
| 0.1 | 1.9 | 2.1 | 6.0 | 0.8 |
| 1 | 2.0 | 2.0 | 3.0 | 0.5 |
| 10 | 4.0 | 2.0 | 2.0 | 0.5 |
| Functionality | Ours | SIO | OUC | CUG |
|---|---|---|---|---|
| Low noise | ||||
| Cold resistance | ||||
| Standalone |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, F.; Chun, S.; Chen, R.; Xu, C.; Cao, X. A Low-Noise Amplifier for Submarine Electric Field Signal Based on Chopping Amplification Technology. Sensors 2024, 24, 1417. https://doi.org/10.3390/s24051417
Liu F, Chun S, Chen R, Xu C, Cao X. A Low-Noise Amplifier for Submarine Electric Field Signal Based on Chopping Amplification Technology. Sensors. 2024; 24(5):1417. https://doi.org/10.3390/s24051417
Chicago/Turabian StyleLiu, Fenghai, Shaoheng Chun, Rujun Chen, Chao Xu, and Xun Cao. 2024. "A Low-Noise Amplifier for Submarine Electric Field Signal Based on Chopping Amplification Technology" Sensors 24, no. 5: 1417. https://doi.org/10.3390/s24051417