
Speed Measurement of the Moving Targets Using the Stepping Equivalent Range-Gate Method


Abstract
1. Introduction
2. Methods
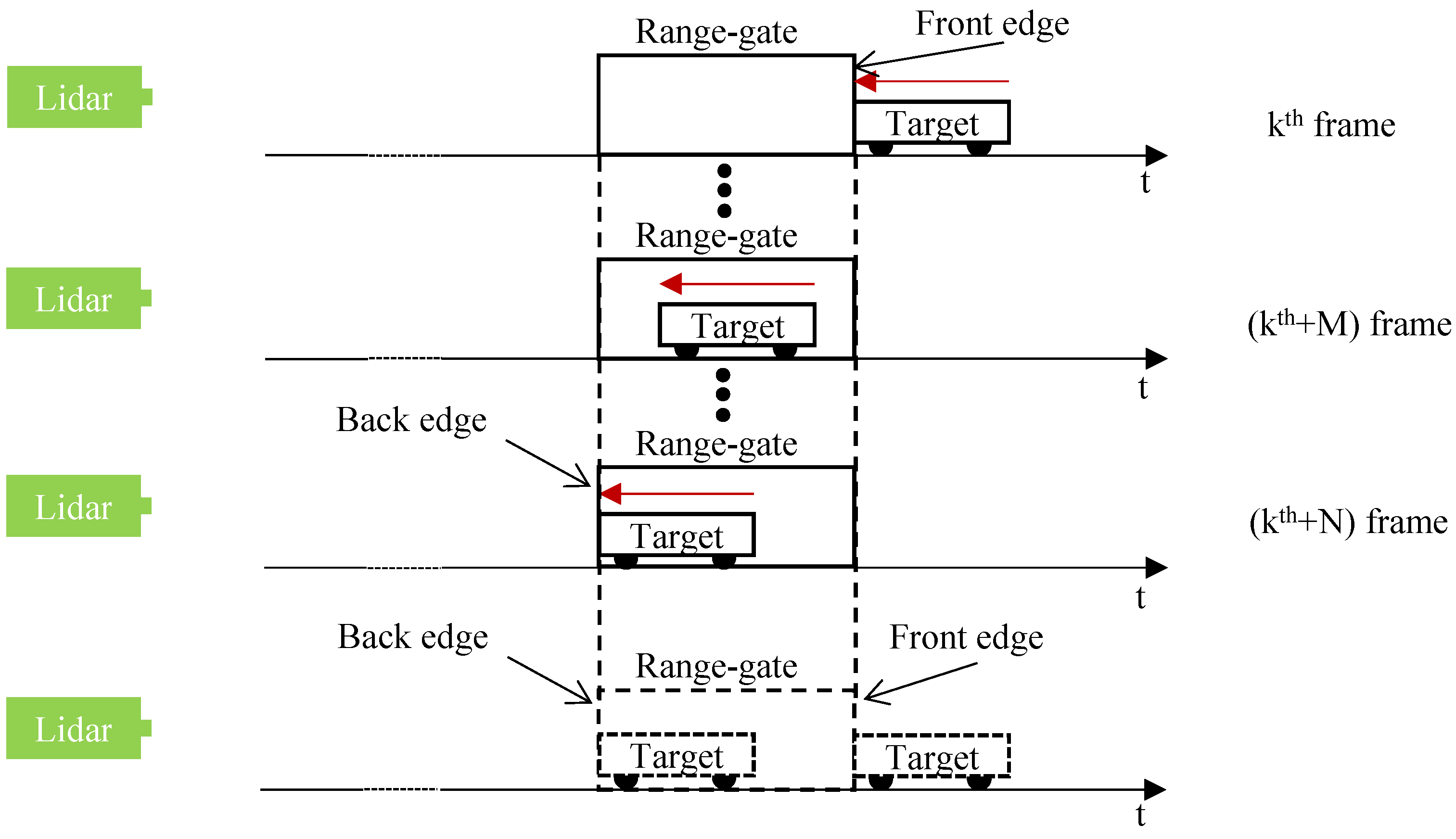
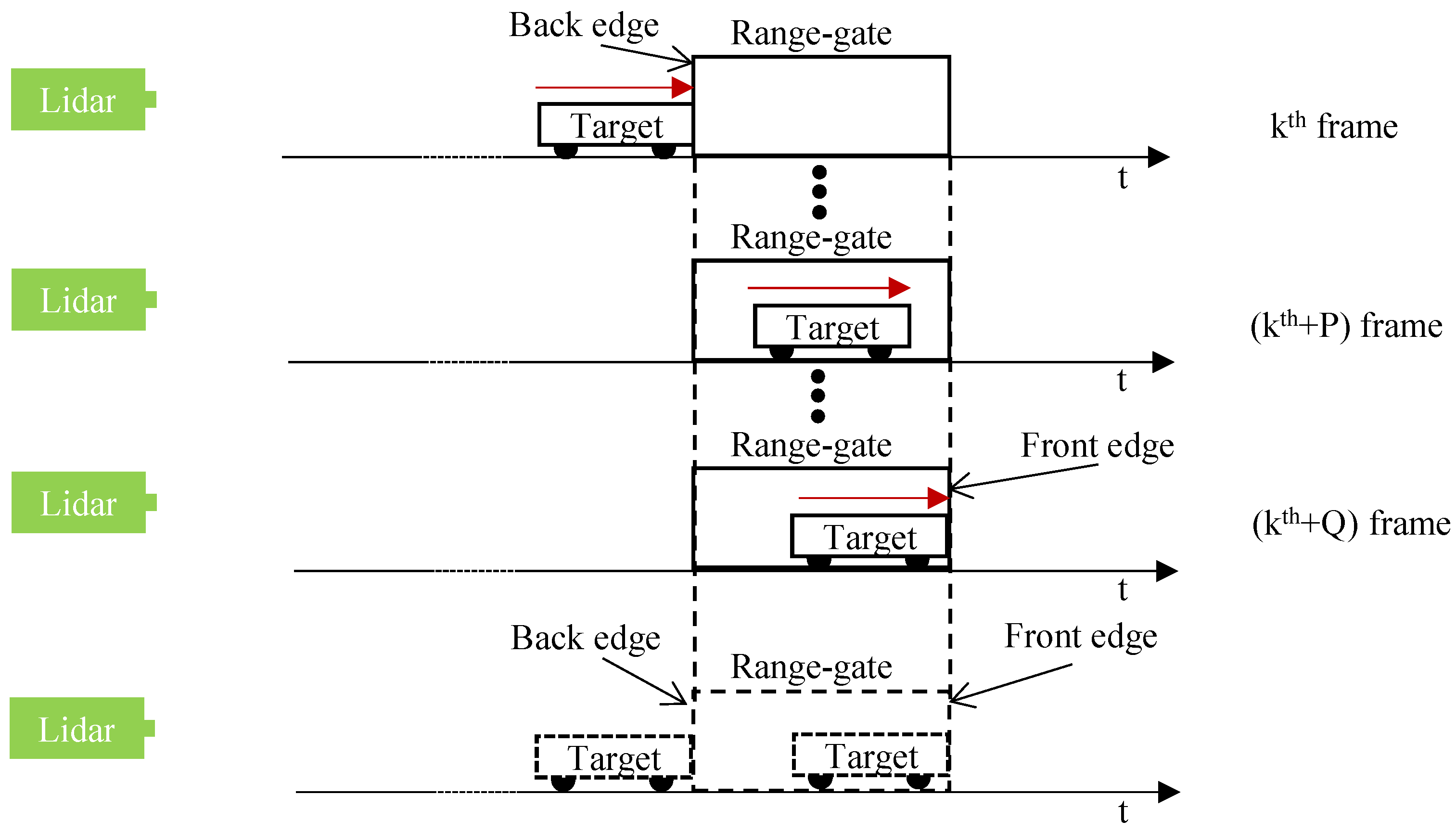
2.1. Statics ERG Method to Measure the Speed of the Moving Target
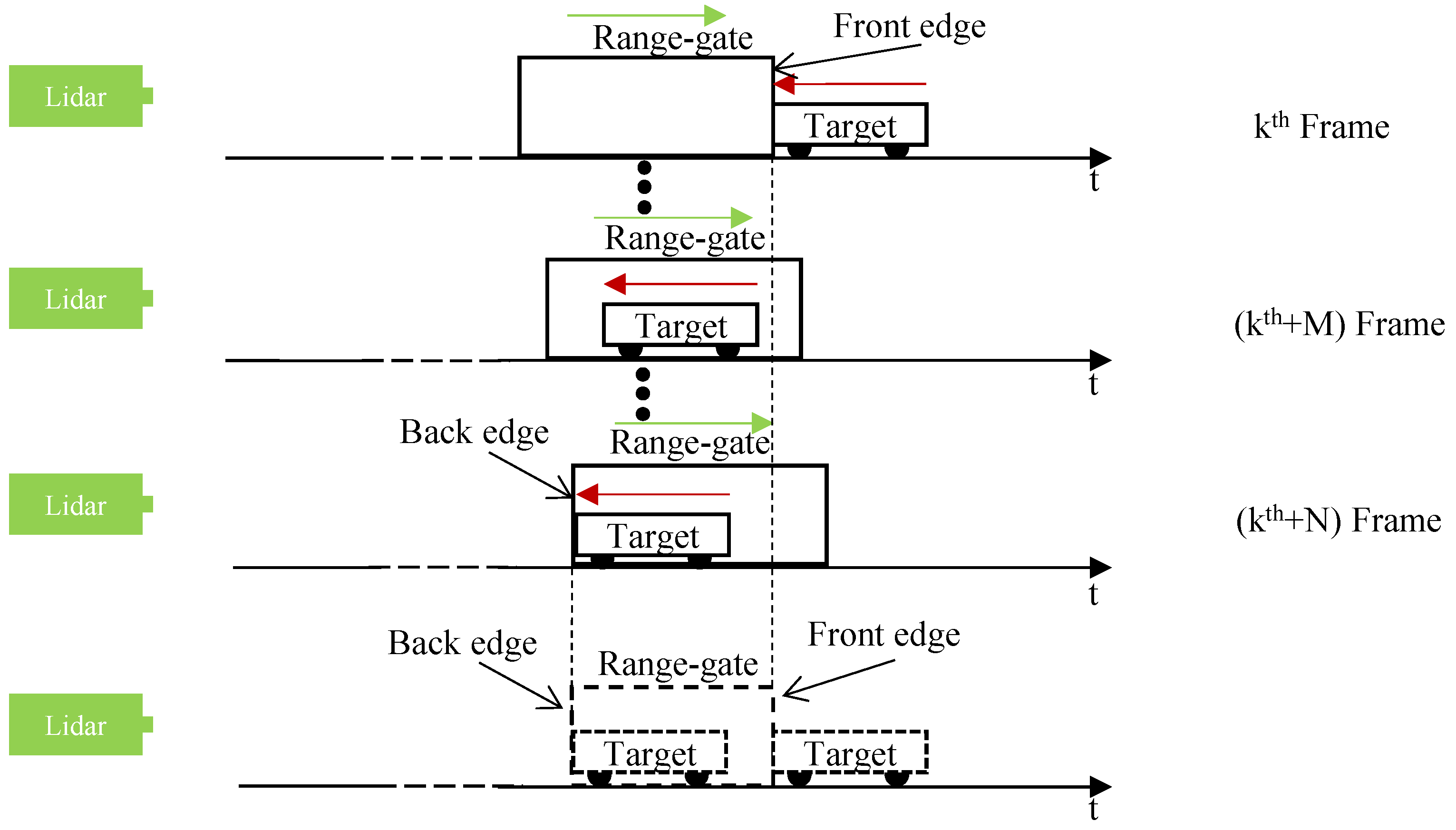
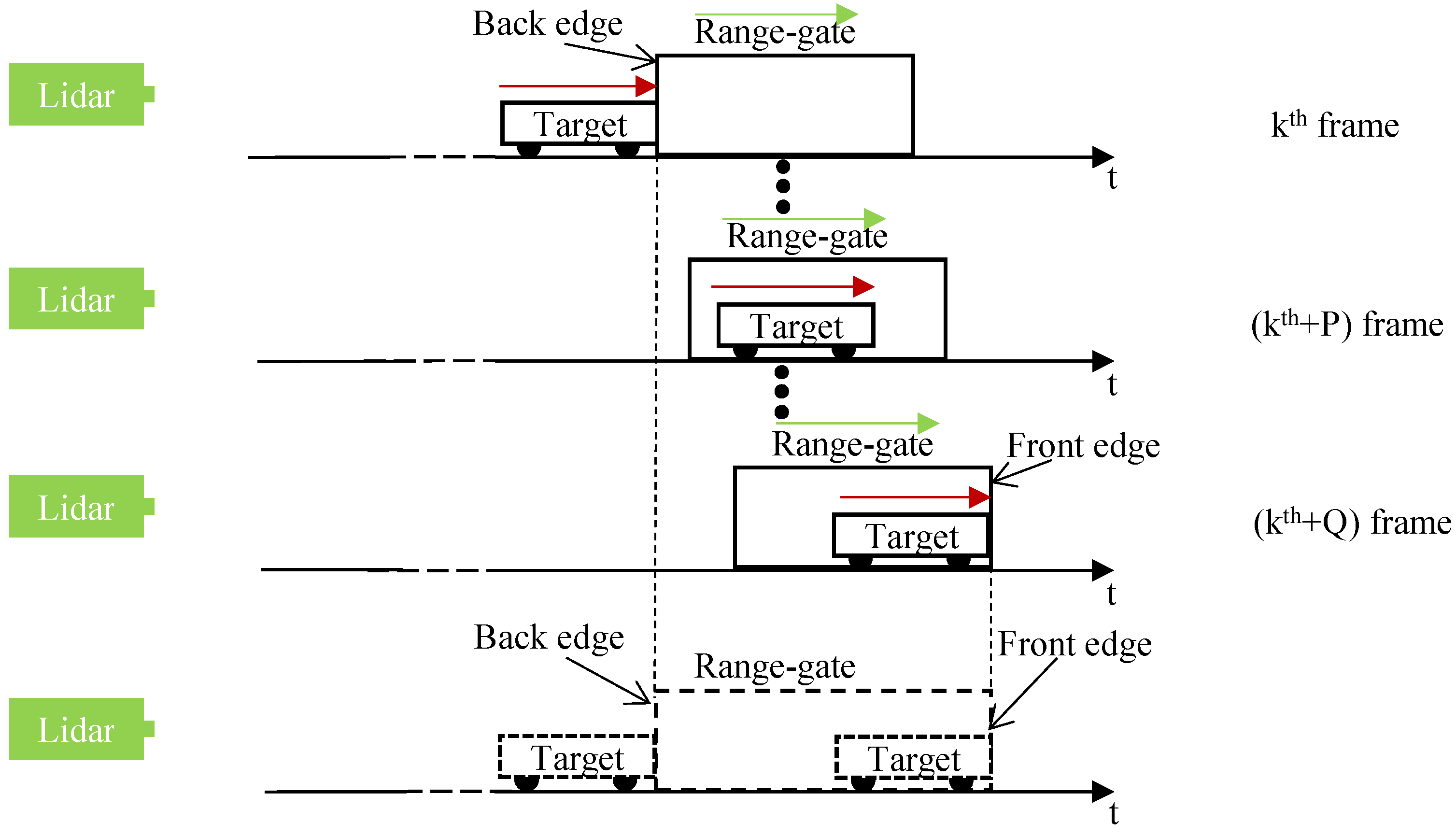
2.2. Stepping ERG Method to Measure the Speed of the Moving Target
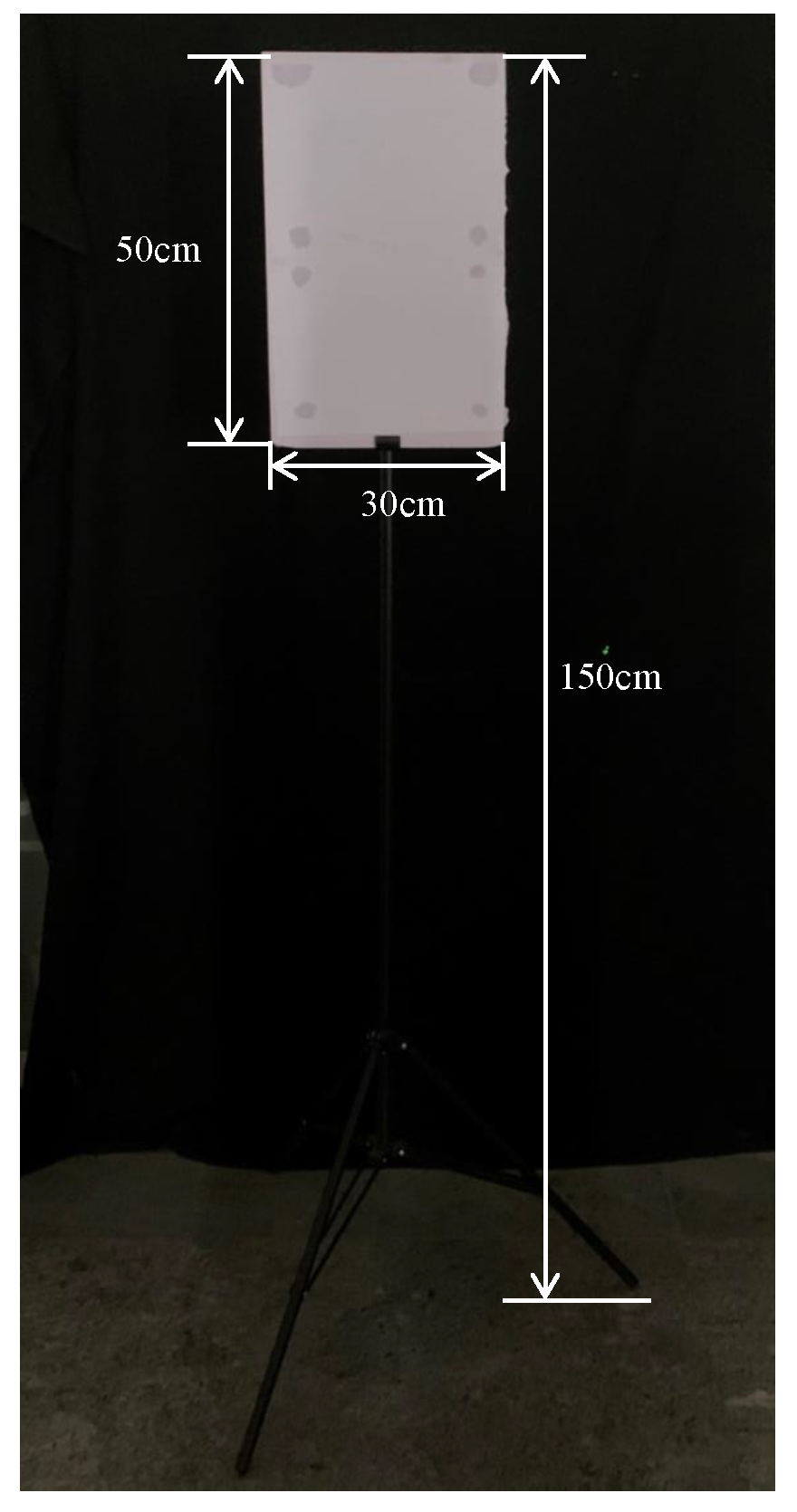
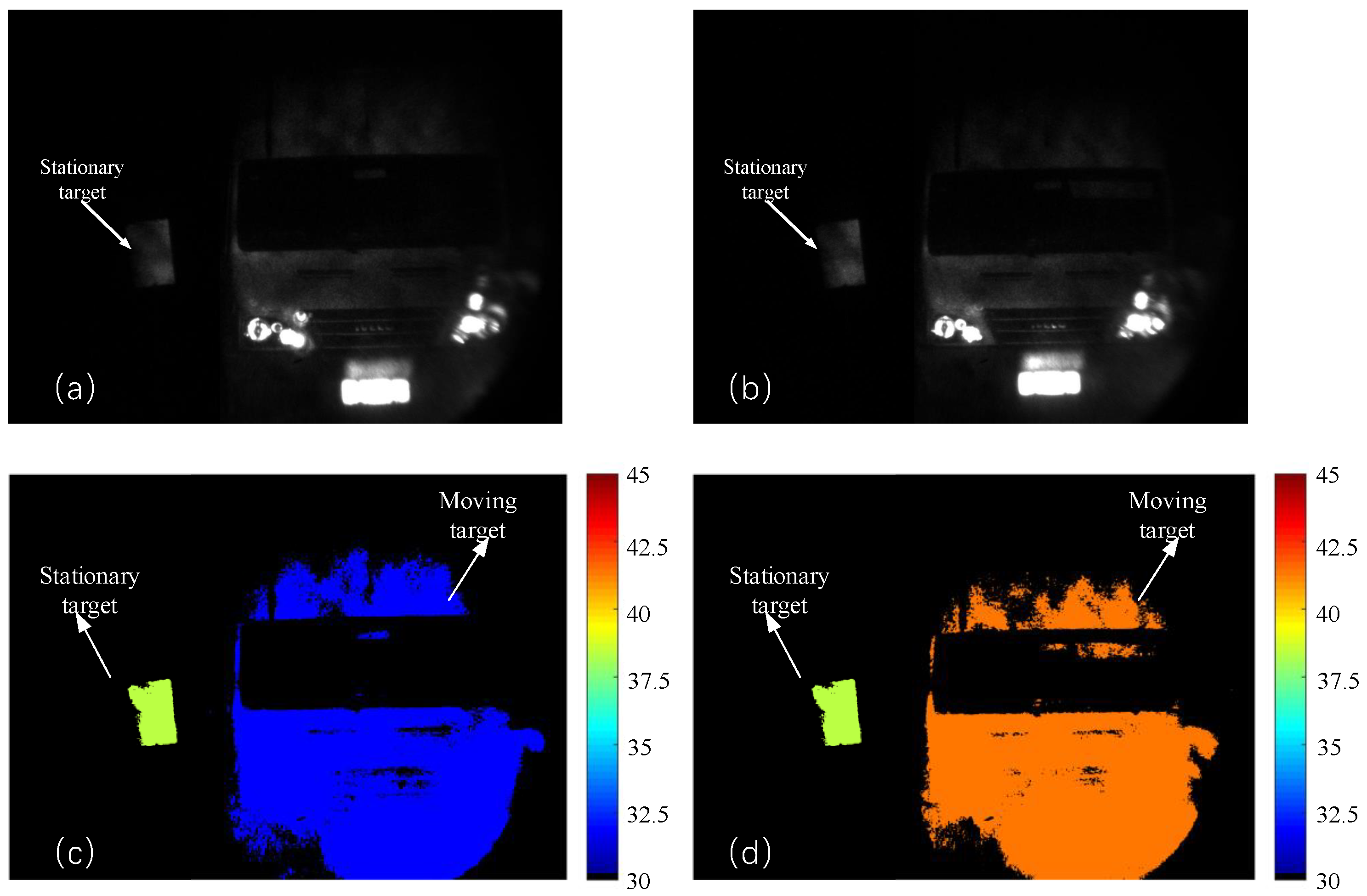
3. Experiment
3.1. Speed Measurement by Static ERG Method
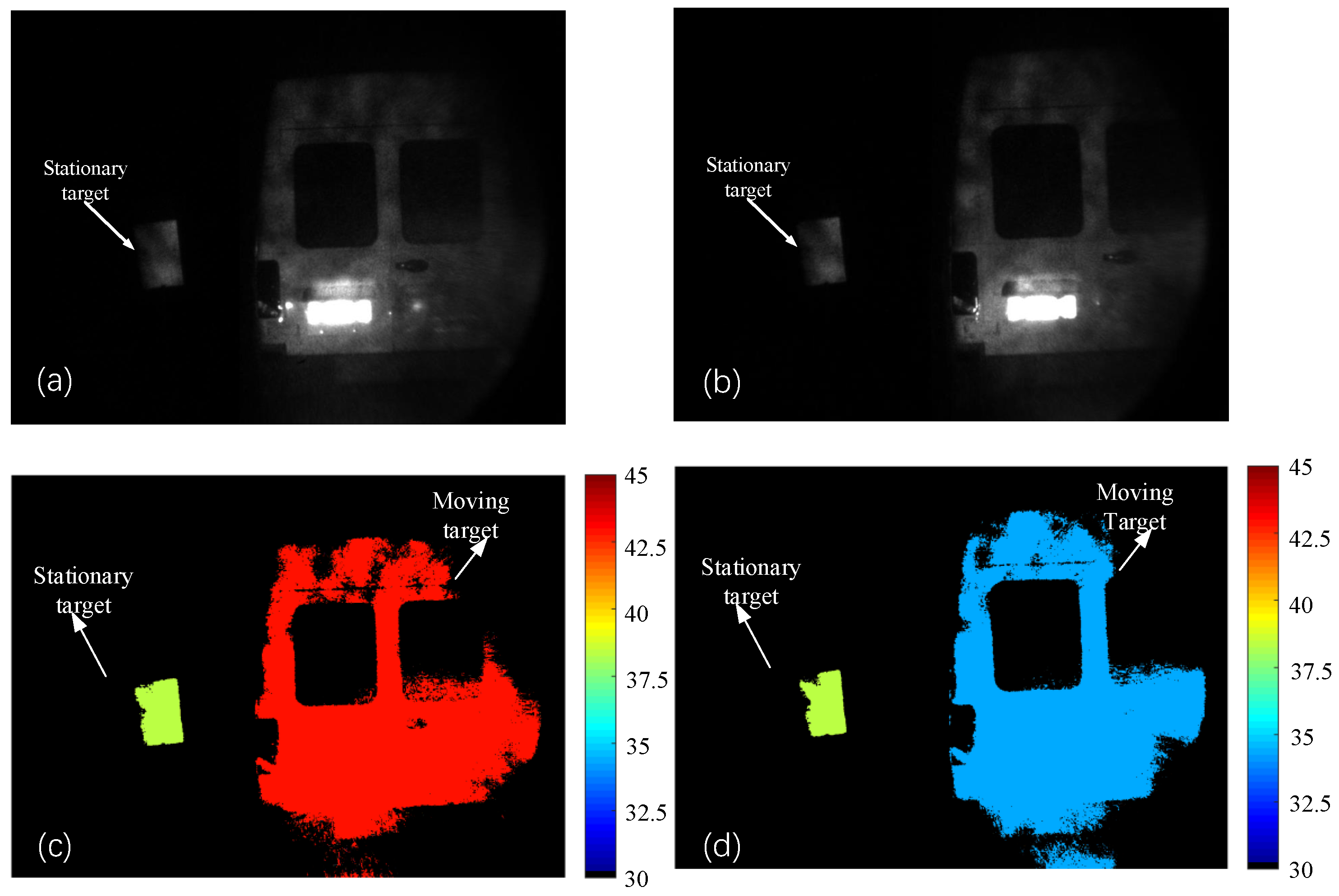
3.2. Speed Measurement by S-ERG Method
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AFD | Adjacent frame difference |
| ERG | Equivalent range gate |
| S-ERG | Stepping equivalent range gate |
| 3D | Three-dimensional |
| ICCD | Intensified-charge-coupled device |
| SNR | Signal-to-noise ratio |
References
- Burnham, R.L. Three-dimensional laser radar for long-range applications. In Laser Radar Technology and Applications VI; SPIE: Bellingham, WA, USA, 2001; pp. 35–45. [Google Scholar]
- Dillon, R.F.; Degloria, D.P.; Pagliughi, F.M.; Muller, J.T.; Michalik, M. Low-cost laser radar imaging experiments. In Laser Radar Technology and Applications III; SPIE: Bellingham, WA, USA, 1992; pp. 274–280. [Google Scholar]
- Xu, X.; Pei, R.; Luo, M.; Tan, Z. 3D Laser Imaging Method based on Low Cost 2D Laser Radar. In Proceedings of the International Symposium on Optoelectronic Technology and Application, Beijing, China, 21–23 May 2018. [Google Scholar]
- Russo, M.; Beraldin, J.A.; Remondino, F.; Morlando, G.; Guidi, G.; Shortis, M.R. Low cost characterization of 3D laser scanners. In Videometrics IX; SPIE: Bellingham, WA, USA, 2007; p. 649107. [Google Scholar]
- Xu, Z.; Zhao, J.; Zhang, F.; Zhang, L.; Pan, S. Photonics-based radar-lidar integrated system for multi-sensor fusion applications. IEEE Sens. J. 2020, 20, 15068–15074. [Google Scholar] [CrossRef]
- Xie, S.Y.; Zhao, Y.Q.; Wang, Y.L.; Lv, H.; Jia, X.D. Microscanning laser imaging technology based on Geiger-mode APD array. Infrared Laser Eng. 2018, 47, 1206010. [Google Scholar]
- Clifton, W.E.; Steele, B.; Nelson, G.; Truscott, A.; Itzler, M.; Entwistle, M. Medium altitude airborne Geiger-mode mapping LIDAR system. In Laser Radar Technology and Applications XX; and Atmospheric Propagation XII; SPIE: Bellingham, WA, USA, 2015; Volume 9465. [Google Scholar]
- Sun, J.; Peng, J.; Xiuchuan, Z.; Xin, Z.; Hongming, F.; Xinjiang, G.; Qi, W. Experimental research of 32 × 32 InGaAs Gm-APD arrays laser active imaging. Infrared Laser Eng. 2016, 45, 1206006. [Google Scholar]
- Xia, W.; Ma, Y.; Han, S.; Wang, Y.; Liu, F.; Zhai, Y. A new three-dimensional nonscanning laser imaging system based on the illumination pattern of a point-light-source array. Rev. Sci. Instrum. 2018, 89, 063108. [Google Scholar] [CrossRef] [PubMed]
- Klasen, L.M.; Steinvall, O.K.; Bolander, G.; Elmqvist, M. Gated viewing in the atmosphere: A study of performance limits. In Laser Radar Technology and Applications VII; SPIE: Bellingham, WA, USA, 2002. [Google Scholar]
- Bi, Z.; Cui, Z.; Zhang, Y.; Tian, Z. Design of precise delay system for streak tube imaging lidar. Opt. Eng. 2018, 57, 124104. [Google Scholar] [CrossRef]
- Li, S.; Xu, Y.; Wei, W.; Zhang, D.; Wei, L. 3D reconstruction of large target by range gated laser imaging. In Optoelectronic Imaging and Multimedia Technology III; SPIE: Bellingham, WA, USA, 2014; Volume 9273. [Google Scholar]
- Lighthart, L.; Nieuwkerk, L. System aspects of a solid-state FM-CW weather surveillance radar. In Proceedings of the Conference Proc. ICR-87 London, London, UK, 19–21 October 1987; pp. 112–115. [Google Scholar]
- Gundersen, R.; Norland, R.; Rolstad Denby, C. Geometric, environmental and hardware error sources of a ground-based interferometric real-aperture FMCW radar system. Remote Sens. 2018, 10, 2070. [Google Scholar] [CrossRef]
- Okano, M.; Chong, C. Swept Source Lidar: Simultaneous FMCW ranging and nonmechanical beam steering with a wideband swept source. Opt. Express 2020, 28, 23898–23915. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Zhu, Z.; Tian, X.; Qiu, L.; Ba, D. Frequency-modulated continuous-wave LIDAR and 3D imaging by using linear frequency modulation based on injection locking. J. Light. Technol. 2021, 39, 2275–2280. [Google Scholar] [CrossRef]
- Busck, J.; Heiselberg, H. Gated viewing and high-accuracy three-dimensional laser radar. Appl. Opt. 2004, 43, 4705–4710. [Google Scholar] [CrossRef] [PubMed]
- Laurenzis, M.; Christnacher, F.; Metzger, N.; Bacher, E.; Zielenski, I. Three-dimensional range-gated imaging at infrared wavelengths with super-resolution depth mapping. In Infrared Technology and Applications XXXV; SPIE: Bellingham, WA, USA, 2009; Volume 7298, p. 729833. [Google Scholar]
- Xinwei, W.; Youfu, L.; Yan, Z. Triangular-range-intensity profile spatial-correlation method for 3D super-resolution range-gated imaging. Appl. Opt. 2013, 52, 7399–7406. [Google Scholar] [CrossRef] [PubMed]
- Yong, Z.; Yuan, Z.; Liu, L.; Jiang, H.; Sun, X. Improvement of range accuracy of range-gating laser radar using the centroid method. Appl. Opt. 2010, 49, 267–271. [Google Scholar]
- Zhaoshuo, T.; Yang, G.; Zhang, Y.; Cui, Z.; Zongjie, B. A range-gated imaging flash Lidar based on the adjacent frame difference method. Opt. Lasers Eng. 2021, 141, 106558. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual Speed (km/h) | Measured Speed (km/h) | Error (%) |
|---|---|---|
| 11–12 | 11.30 | 1.74 |
| 13–14 | 13.83 | 2.4 |
| 15–16 | 15.69 | 1.23 |
| 19–20 | 19.44 | 0.3 |
| 22–23 | 22.67 | 0.76 |
| 28–29 | 28.95 | 1.58 |
| Actual Speed (km/h) | Measured Speed (km/h) | Error (%) |
|---|---|---|
| 9–10 | 9.83 | 3.47 |
| 11–12 | 11.65 | 1.30 |
| 13–14 | 13.84 | 2.52 |
| 20–21 | 19.97 | 2.58 |
| 24–25 | 23.18 | 5.39 |
| 27–28 | 27.38 | 0.44 |
| Delay Step Size Is 1 ns | Delay Step Size Is 5 ns | ||||
|---|---|---|---|---|---|
| Actual Speed (km/h) | Measured Speed (km/h) | Error (%) | Actual Speed (km/h) | Measured Speed (km/h) | Error (%) |
| 14–15 | 14.20 | 2.06 | 9–10 | 9.12 | 4.00 |
| 17–18 | 18.44 | 5.37 | 12–13 | 12.15 | 2.80 |
| 22–23 | 23.30 | 3.56 | 15–16 | 16.16 | 4.26 |
| 23–24 | 23.35 | 0.64 | 23–24 | 22.95 | 2.34 |
| 29–30 | 30.39 | 3.02 | 26–27 | 26.89 | 1.47 |
| 32–33 | 33.90 | 4.31 | 32–33 | 33.75 | 3.85 |
| Actual Speed (km/h) | Measured Speed (km/h) | Error (%) |
|---|---|---|
| 12–13 | 13.11 | 4.88 |
| 14–15 | 14.90 | 2.76 |
| 18–19 | 18.50 | 0 |
| 26–27 | 25.95 | 2.07 |
| 27–28 | 27.75 | 0.91 |
| 31–32 | 31.36 | 4.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, G.; Tian, Z.; Bi, Z.; Cui, Z. Speed Measurement of the Moving Targets Using the Stepping Equivalent Range-Gate Method. Sensors 2024, 24, 1437. https://doi.org/10.3390/s24051437
Yang G, Tian Z, Bi Z, Cui Z. Speed Measurement of the Moving Targets Using the Stepping Equivalent Range-Gate Method. Sensors. 2024; 24(5):1437. https://doi.org/10.3390/s24051437
Chicago/Turabian StyleYang, Gang, Zhaoshuo Tian, Zongjie Bi, and Zihao Cui. 2024. "Speed Measurement of the Moving Targets Using the Stepping Equivalent Range-Gate Method" Sensors 24, no. 5: 1437. https://doi.org/10.3390/s24051437
APA StyleYang, G., Tian, Z., Bi, Z., & Cui, Z. (2024). Speed Measurement of the Moving Targets Using the Stepping Equivalent Range-Gate Method. Sensors, 24(5), 1437. https://doi.org/10.3390/s24051437