
Using Fuzzy C-Means Clustering to Determine First Arrival of Microseismic Recordings


Abstract
:1. Introduction
2. Methods
2.1. Fuzzy C-Means Clustering
2.2. Features Extraction for Fuzzy Clustering
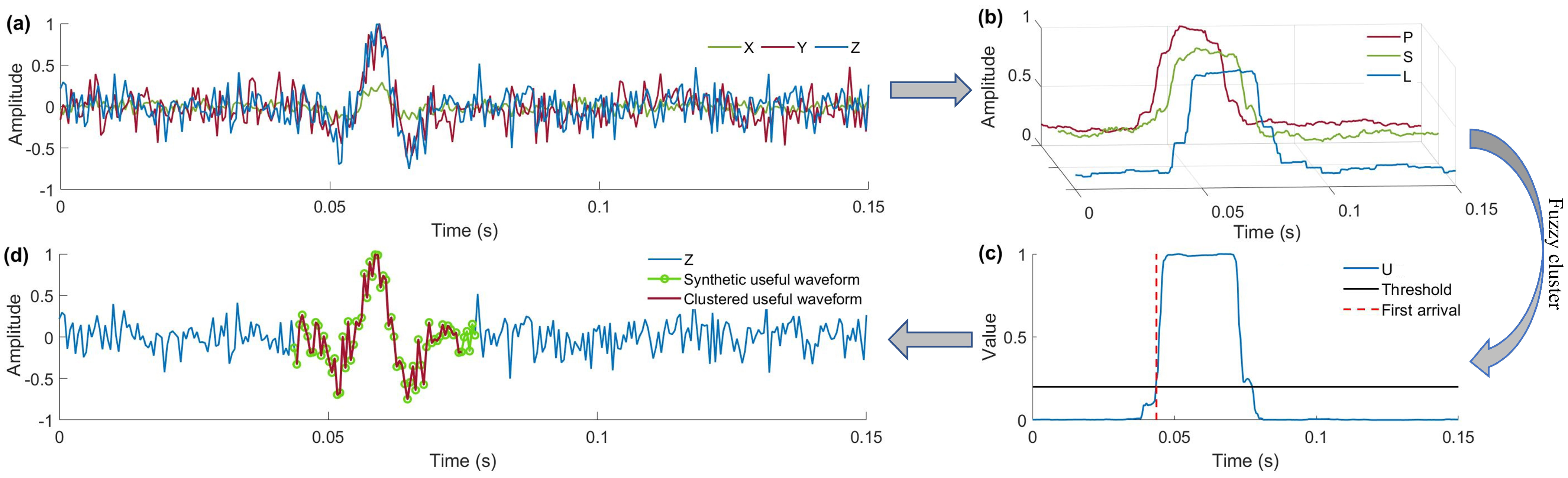
2.3. Fuzzy C-Means Clustering for First-Arrival Picking
3. Tests and Results
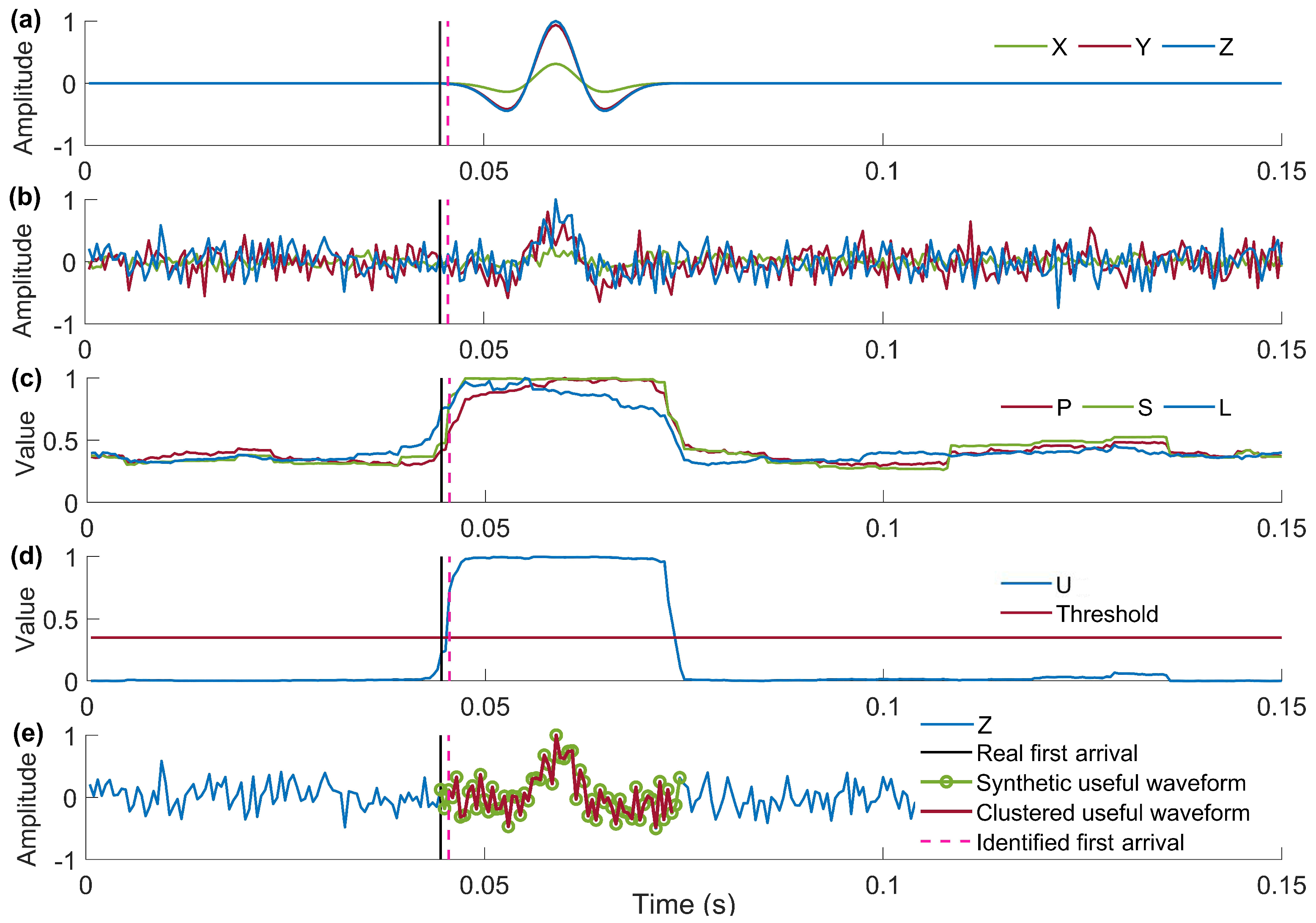
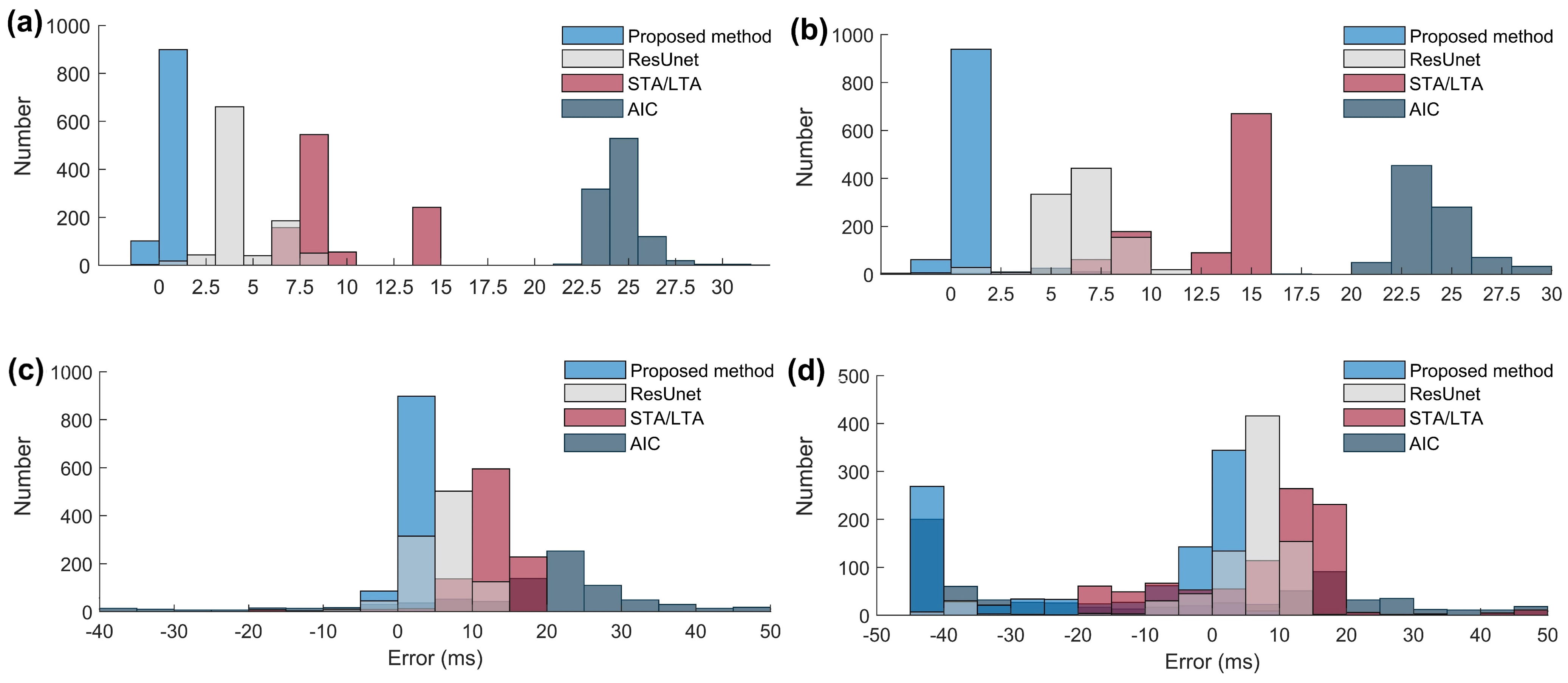
3.1. Synthetic Data Test
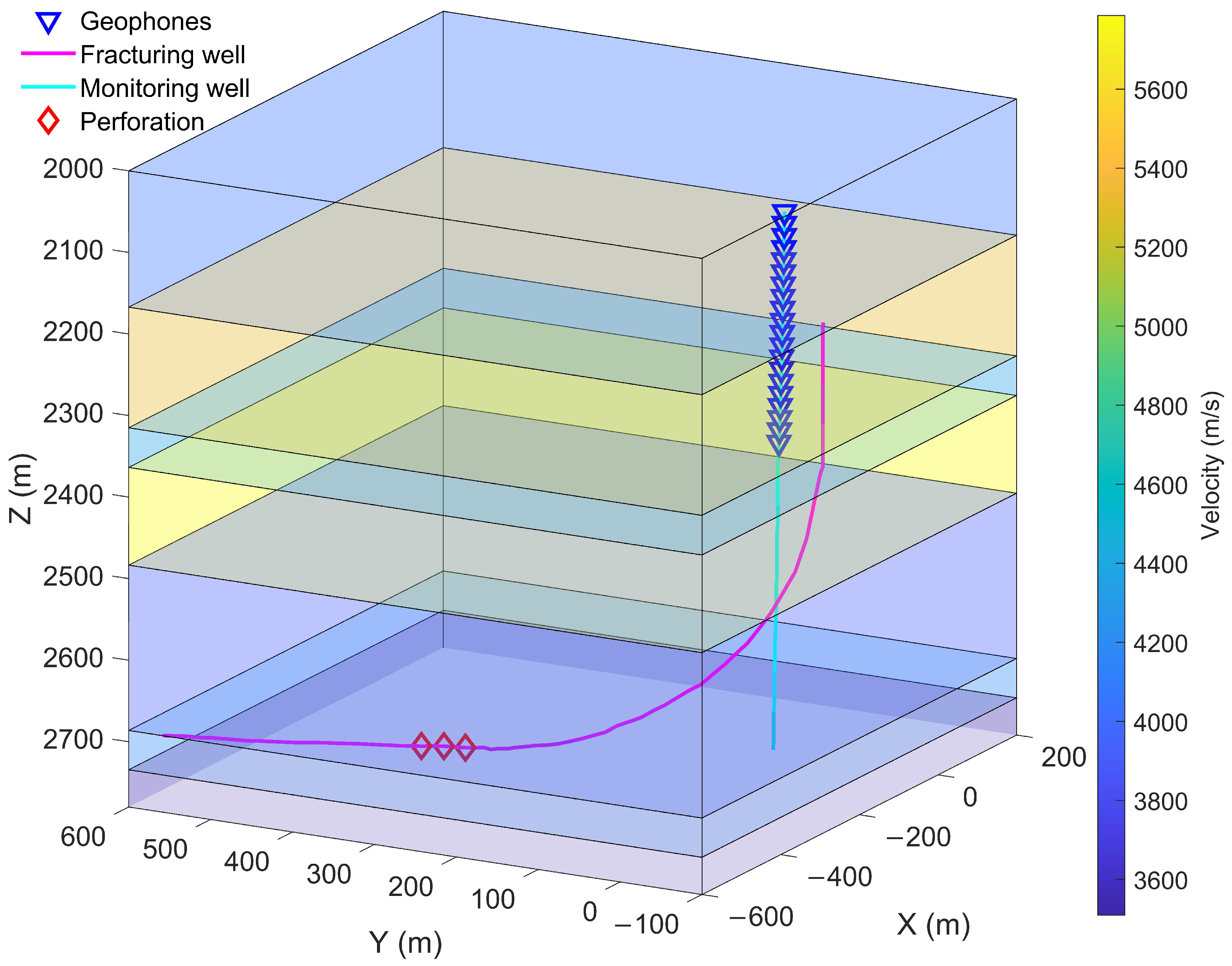
3.2. Test of Real Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, R.; Li, D.; Pang, H.; Ma, T.; Cheng, J.; Meng, L. Fracture imaging of the surface based microseismic monitoring in shale gas fracking: Methods and application. Nat. Gas Ind. 2017, 37, 31–37. [Google Scholar]
- Feng, G.L.; Feng, X.T.; Chen, B.R.; Xiao, Y.X. Performance and feasibility analysis of two microseismic location methods used in tunnel engineering. Tunn. Undergr. Space Technol. 2017, 63, 183–193. [Google Scholar] [CrossRef]
- Li, J.; Stankovic, L.; Pytharouli, S.; Stankovic, V. Automated platform for microseismic signal analysis: Denoising, detection, and classification in slope stability studies. IEEE Trans. Geosci. Remote Sens. 2020, 59, 7996–8006. [Google Scholar] [CrossRef]
- Ma, T.; Tang, C.; Tang, L.; Zhang, W.; Wang, L. Rockburst characteristics and microseismic monitoring of deep-buried tunnels for Jinping II Hydropower Station. Tunn. Undergr. Space Technol. 2015, 49, 345–368. [Google Scholar] [CrossRef]
- Liu, J.P.; Feng, X.T.; Li, Y.H.; Sheng, Y. Studies on temporal and spatial variation of microseismic activities in a deep metal mine. Int. J. Rock Mech. Min. Sci. 2013, 60, 171–179. [Google Scholar] [CrossRef]
- Senkaya, M.; Karsli, H. A semi-automatic approach to identify first arrival time: The cross-correlation technique (CCT). Earth Sci. Res. J. 2014, 18, 107–113. [Google Scholar] [CrossRef]
- Allen, R. Automatic phase pickers: Their present use and future prospects. Bull. Seismol. Soc. Am. 1982, 72, S225–S242. [Google Scholar] [CrossRef]
- Akaike, H. A new look at the statistical model identification. IEEE Trans. Autom. Control 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Lan, Z.; Gao, P.; Wang, P.; Wang, Y.; Liang, J.; Hu, G. Automatic first arrival time identification using fuzzy C-means and AIC. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5907613. [Google Scholar] [CrossRef]
- Long, Y.; Lin, J.; Li, B.; Wang, H.; Chen, Z. Fast-AIC method for automatic first arrivals picking of microseismic event with multitrace energy stacking envelope summation. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1832–1836. [Google Scholar] [CrossRef]
- Gaci, S. The use of wavelet-based denoising techniques to enhance the first-arrival picking on seismic traces. IEEE Trans. Geosci. Remote Sens. 2013, 52, 4558–4563. [Google Scholar] [CrossRef]
- Hafez, A.G.; Rabie, M.; Kohda, T. Seismic noise study for accurate P-wave arrival detection via MODWT. Comput. Geosci. 2013, 54, 148–159. [Google Scholar] [CrossRef]
- Saragiotis, C.D.; Hadjileontiadis, L.J.; Panas, S.M. PAI-S/K: A robust automatic seismic P phase arrival identification scheme. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1395–1404. [Google Scholar] [CrossRef]
- Dong, X.; Li, Y.; Wu, N.; Tian, Y.; Yu, P. The S-STK/LTK algorithm for arrival time picking of microseismic signals. J. Geophys. Eng. 2018, 15, 1484–1491. [Google Scholar] [CrossRef]
- Luo, F.; Feng, B.; Wang, H. Automatic first-arrival picking method via intelligent Markov optimal decision processes. J. Geophys. Eng. 2021, 18, 406–417. [Google Scholar] [CrossRef]
- Leng, J.; Yu, Z.; Mao, Z.; He, C. Optimization and Quality Assessment of Arrival Time Picking for Downhole Microseismic Events. Sensors 2022, 22, 4065. [Google Scholar] [CrossRef]
- Wu, H.; Xiao, W.; Ren, H. Automatic Time Picking for Weak Seismic Phase in the Strong Noise and Interference Environment: An Hybrid Method Based on Array Similarity. Sensors 2022, 22, 9924. [Google Scholar] [CrossRef]
- Álvarez, I.; García, L.; Mota, S.; Cortés, G.; Benítez, C.; De la Torre, Á. An automatic P-phase picking algorithm based on adaptive multiband processing. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1488–1492. [Google Scholar] [CrossRef]
- Ross, Z.E.; Ben-Zion, Y. An earthquake detection algorithm with pseudo-probabilities of multiple indicators. Geophys. J. Int. 2014, 197, 458–463. [Google Scholar] [CrossRef]
- Li, H.; Tuo, X.; Wang, R.; Courtois, J. A Reliable Strategy for Improving Automatic First-Arrival Picking of High-Noise Three-Component Microseismic Data. Seismol. Res. Lett. 2019, 90, 1336–1345. [Google Scholar] [CrossRef]
- Li, H.; Yang, Z.; Yan, W. An improved AIC onset-time picking method based on regression convolutional neural network. Mech. Syst. Signal Process. 2022, 171, 108867. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, B.; Wang, X.; Li, T. Time series segmentation clustering: A new method for S-phase picking in microseismic data. IEEE Geosci. Remote Sens. Lett. 2021, 19, 7504605. [Google Scholar] [CrossRef]
- Tan, Y.; He, C. Improved methods for detection and arrival picking of microseismic events with low signal-to-noise ratiosMS event detection and arrival picking. Geophysics 2016, 81, KS93–KS111. [Google Scholar] [CrossRef]
- Akram, J.; Eaton, D.W. A review and appraisal of arrival-time picking methods for downhole microseismic data. Geophysics 2016, 81, KS71–KS91. [Google Scholar] [CrossRef]
- Saad, O.M.; Inoue, K.; Shalaby, A.; Samy, L.; Sayed, M.S. Automatic arrival time detection for earthquakes based on stacked denoising autoencoder. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1687–1691. [Google Scholar] [CrossRef]
- Li, H.; Shi, J.; Li, L.; Tuo, X.; Qu, K.; Rong, W. Novel wavelet threshold denoising method to highlight the first break of noisy microseismic recordings. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5910110. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Beroza, G.C. Deep-learning seismology. Science 2022, 377, eabm4470. [Google Scholar] [CrossRef] [PubMed]
- Ma, C.; Yan, W.; Xu, W.; Li, T.; Ran, X.; Wan, J.; Tong, K.; Lin, Y. Parallel Processing Method for Microseismic Signal Based on Deep Neural Network. Remote Sens. 2023, 15, 1215. [Google Scholar] [CrossRef]
- Yuan, S.; Liu, J.; Wang, S.; Wang, T.; Shi, P. Seismic waveform classification and first-break picking using convolution neural networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 272–276. [Google Scholar] [CrossRef]
- Li, J.; Li, K.; Tang, S. Automatic arrival-time picking of P-and S-waves of microseismic events based on object detection and CNN. Soil Dyn. Earthq. Eng. 2023, 164, 107560. [Google Scholar] [CrossRef]
- Liu, N.; Chen, J.; Wu, H.; Li, F.; Gao, J. Microseismic first-arrival picking using fine-tuning feature pyramid networks. IEEE Geosci. Remote Sens. Lett. 2021, 19, 7505105. [Google Scholar] [CrossRef]
- Guo, C.; Zhu, T.; Gao, Y.; Wu, S.; Sun, J. AEnet: Automatic picking of P-wave first arrivals using deep learning. IEEE Trans. Geosci. Remote Sens. 2020, 59, 5293–5303. [Google Scholar] [CrossRef]
- Omar, S.M.; Yangkang, C. CapsPhase: Capsule neural network for seismic phase classification and picking. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5904311. [Google Scholar]
- Saad, O.M.; Chen, Y. Earthquake detection and P-wave arrival time picking using capsule neural network. IEEE Trans. Geosci. Remote Sens. 2020, 59, 6234–6243. [Google Scholar] [CrossRef]
- Zhu, W.; Beroza, G.C. PhaseNet: A deep-neural-network-based seismic arrival-time picking method. Geophys. J. Int. 2019, 216, 261–273. [Google Scholar] [CrossRef]
- Wang, J.; Xiao, Z.; Liu, C.; Zhao, D.; Yao, Z. Deep learning for picking seismic arrival times. J. Geophys. Res. Solid Earth 2019, 124, 6612–6624. [Google Scholar] [CrossRef]
- Ma, Y.; Cao, S.; Rector, J.W.; Zhang, Z. Automated arrival-time picking using a pixel-level network. Geophysics 2020, 85, V415–V423. [Google Scholar] [CrossRef]
- Zhang, W.; Feng, X.T.; Bi, X.; Yao, Z.B.; Xiao, Y.X.; Hu, L.; Niu, W.J.; Feng, G.L. An arrival time picker for microseismic rock fracturing waveforms and its quality control for automatic localization in tunnels. Comput. Geotech. 2021, 135, 104175. [Google Scholar] [CrossRef]
- Ross, Z.E.; Meier, M.A.; Hauksson, E. P wave arrival picking and first-motion polarity determination with deep learning. J. Geophys. Res. Solid Earth 2018, 123, 5120–5129. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Ellsworth, W.L.; Zhu, W.; Chuang, L.Y.; Beroza, G.C. Earthquake transformer—An attentive deep-learning model for simultaneous earthquake detection and phase picking. Nat. Commun. 2020, 11, 3952. [Google Scholar] [CrossRef]
- Cano, E.V.; Akram, J.; Peter, D.B. Automatic seismic phase picking based on unsupervised machine-learning classification and content information analysis. Geophysics 2021, 86, V299–V315. [Google Scholar] [CrossRef]
- Chen, Y. Automatic microseismic event picking via unsupervised machine learning. Geophys. J. Int. 2020, 222, 1750–1764. [Google Scholar] [CrossRef]
- Seydoux, L.; Balestriero, R.; Poli, P.; Hoop, M.d.; Campillo, M.; Baraniuk, R. Clustering earthquake signals and background noises in continuous seismic data with unsupervised deep learning. Nat. Commun. 2020, 11, 3972. [Google Scholar] [CrossRef] [PubMed]
- Silva Filho, T.M.; Pimentel, B.A.; Souza, R.M.; Oliveira, A.L. Hybrid methods for fuzzy clustering based on fuzzy c-means and improved particle swarm optimization. Expert Syst. Appl. 2015, 42, 6315–6328. [Google Scholar] [CrossRef]
- Gao, L.; Jiang, H.; Min, F. Stable first-arrival picking through adaptive threshold determination and spatial constraint clustering. Expert Syst. Appl. 2021, 182, 115216. [Google Scholar] [CrossRef]
- Zhu, D.; Li, Y.; Zhang, C. Automatic time picking for microseismic data based on a fuzzy C-means clustering algorithm. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1900–1904. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Z.; Wang, J.; Sui, Q.; Li, S.; Wang, H.; Cao, Z. First arrival picking on microseismic signals based on K-means with a ReliefF algorithm. Symmetry 2021, 13, 790. [Google Scholar] [CrossRef]
- Li, H.; Qu, K.; Rong, W.; Tuo, X.; Lu, J.; Wang, R.; Wang, X.; Courtois, J. PolarGUI: A MATLAB-Based Tool for Polarization Analysis of the Three-Component Seismic Data Using Different Algorithms. Seismol. Res. Lett. 2021, 92, 3821–3831. [Google Scholar] [CrossRef]
- Samson, J.; Olson, J. Some comments on the descriptions of the polarization states of waves. Geophys. J. Int. 1980, 61, 115–129. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR (dB) | Number of Signals | Error (10 ms) | Error (2 ms) |
|---|---|---|---|
| 5 | 1000 | 1000 | 1000 |
| 0 | 1000 | 1000 | 999 |
| −5 | 1000 | 974 | 943 |
| −7 | 1000 | 872 | 794 |
| −8 | 1000 | 743 | 637 |
| −10 | 1000 | 506 | 383 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Chen, H.; Li, B.; Yang, Z.; Li, H. Using Fuzzy C-Means Clustering to Determine First Arrival of Microseismic Recordings. Sensors 2024, 24, 1682. https://doi.org/10.3390/s24051682
Zhao X, Chen H, Li B, Yang Z, Li H. Using Fuzzy C-Means Clustering to Determine First Arrival of Microseismic Recordings. Sensors. 2024; 24(5):1682. https://doi.org/10.3390/s24051682
Chicago/Turabian StyleZhao, Xiangyun, Haihang Chen, Binhong Li, Zhen Yang, and Huailiang Li. 2024. "Using Fuzzy C-Means Clustering to Determine First Arrival of Microseismic Recordings" Sensors 24, no. 5: 1682. https://doi.org/10.3390/s24051682
APA StyleZhao, X., Chen, H., Li, B., Yang, Z., & Li, H. (2024). Using Fuzzy C-Means Clustering to Determine First Arrival of Microseismic Recordings. Sensors, 24(5), 1682. https://doi.org/10.3390/s24051682