1. Introduction
Bridges are a critical component of the infrastructure that supports national and local economies, aiding the transportation of people and goods and connecting communities. Scour is defined by Hamill [
1] as the removal of soil from around bridge foundations by the action of flowing water and is the leading cause of bridge failure in the UK and the US [
2,
3]. It is anticipated that bridges over waterways will face an increased risk of scour erosion in the future due to the increased frequency of extreme weather as a result of climate change [
4,
5].
In most developed countries, bridge condition is predominately assessed by visual inspections [
6], and for bridge piers situated in deep waterways, this is carried out by qualified sub aqua divers. The visibility of the foundations is often restricted because of murky water, and scour is hard to detect, even in shallow waterways, as often the scour holes infill with sediment, which has weaker mechanical properties than the original riverbed. For example, the sudden collapse of Malahide Bridge, Dublin, Ireland, in 2009 occurred three days after an inspection did not identify scour which was present at the time [
7]. Scour can lead to the rapid compromise of foundation stiffness and the catastrophic collapse of the bridge, and in extreme circumstances, loss of life [
8,
9]. As a result, bridges identified as a scour risk are required to undergo much more frequent visual inspections. In Cumbria, UK, after intensive rainfall in 2015, many bridges were classified as having a high scour risk and requiring emergency inspections. Underwater inspections were delayed for many bridges due to health and safety concerns associated with working during a flood event and also by the limited number of qualified divers. Full inspections for over 180 bridges were delayed until the autumn of the next year [
5,
10]. For these reasons, amongst others, there is considerable research interest in the development of remote electronic sensing systems.
There are many fixed instrumentation devices which aim to detect scour. These are normally installed at a high-risk scour location in the vicinity of a bridge. Float-out devices are buried or driven into the riverbed. A response in a data logger installed on the bridge or nearby is triggered when the riverbed is eroded to a point which causes the device to float out and change position. These devices need to be reburied once they have been triggered and as such do not offer continuous monitoring [
11,
12]. The principle of a magnetic sliding collar device is that, as scour develops, the magnetic collar will slide down the rods which have been driven into the riverbed, allowing a reading to be taken of the collar’s new position [
13]. Smart rocks are magnets encased in concrete and embedded upstream of the bridge which roll into scour holes when they have been eroded from the riverbed, with the relocation detected from a sensor mounted nearby [
14,
15,
16]. Driven rod systems are embedded into the riverbed and the length of the exposed rod is back-calculated from the change in natural frequency of the rod using fibre-optic Gragg grating sensors, triggering an alert if scour has occurred. Other driven rod systems detect the increase in strain activity when scour exposes the embedded sensors to flowing water [
17,
18,
19]. Dielectric probes can be inserted into the riverbed in a scour risk zone, measuring the electromagnetic properties of the soil. These can detect the changing bed level of a river as well as the difference between in situ and redeposited material in a scour hole [
20,
21]. Time-Domain Reflectometry systems also monitor the dielectric permittivity of the riverbed but in relation to a fixed probe [
22,
23]. A limitation of these fixed instrumentation devices (including, but not limited to, those described above) is that installation is required on the riverbed, and that they are only capable of detecting scour in the vicinity of the device.
A number of systems have been developed that use electromagnetic waves, sound waves, and satellite radar to monitor the progression of scour. Some of these devices are completely mobile and deployed on lorry-mounted cranes or unmanned boats. Known issues include noise associated with turbid water and difficultly identifying the river bed under water with a high concentration of sediments, debris, or gas bubbles and vegetation [
24,
25,
26,
27,
28,
29]. These techniques offer many advantages over carrying out underwater visual inspections, including improved health and safety of the inspectors, and are generally good in locations with poor access and poor visibility. A more comprehensive overview of scour monitoring devices can be found in studies by Kirby et al. [
2], Kitchen et al. [
10], Hunt [
12], Fisher et al. [
22], and Chen et al. [
30].
A common drawback of conventional scour monitoring systems is that they measure the development of scour on the riverbed and not the effect of the scour on the stiffness and capacity of the structure. Direct monitoring of the changes in the structural behaviour of the bridge to discern the presence of scour has been taken forward by researchers in recent years, mainly in the field of modal analysis.
Xiong et al. [
31], Xiong et al. [
32], and Xiong et al. [
33] carried out modal analyses of a bridge in the field before and after scouring took place, identifying the presence of scour by examining the support boundary conditions, i.e., the bridge foundations. The finite element (FE) model of the bridge was able to identify the depth of scour, as verified by an underwater terrain map of the area. Chen et al. [
34] constructed an FE model, verified against a bridge in the field, and used it to perform a modal analysis. The best boundary support conditions were selected with a known soil depth at one of the piers, with the model then able to identify the scour depth at other piers as verified by onsite measurements. The effect of air temperature, water level, and traffic load on the results was examined by Wu et al. [
35], with the traffic load being the most dominant of these factors (it is a long cable-stayed bridge with multiple traffic lanes). The effect of variation in temperature on the frequency is not as significant as variation in traffic loading. Also, it has been observed that the modal frequency baselines of the pier modes are very likely to increase with the increasing water level during the rainy season, but are constant during the summer when there is little change in the water level. Ju [
36] also used an FE model validated against a bridge in the field to link bridge scour to a decrease in the natural frequency of the bridge. It was observed that the soil–fluid–structure interactions lower the natural frequency of the bridge, an important consideration if the bridge is submerged in water.
Kong and Cai [
37] utilised an FE model approach to study several dynamic parameters of the substructure and superstructure, as well as a traversing vehicle, under the excitation of wave forces to detect scour damage. The findings include that scour has a relatively significant effect on the lower frequencies of a group of piles, and the frequency change of the foundation caused by the scour can also be detected from the response of the bridge deck as well as from the acceleration response from a vehicle moving on the bridge. Foti and Sabia [
38] observed that the span of a bridge in the field which was sitting on a scoured pier had a lower fundamental frequency and an increased deformation of the span, and that a modal analysis proved to be less successful at identifying the scour. This is attributed to the rigid body motion of the piers.
Kariyawasam et al. [
39] carried out a modal analysis in the laboratory on various bridge models and observed a decrease in the fundamental natural frequencies of the bridge models in response to scour. Khan et al. [
40] and Khan et al. [
41] performed a modal analysis using re-deployable accelerometers on a bridge in the laboratory, which was then tested on a bridge in the field. Prendergast and Gavin [
42] and Prendergast et al. [
43] carried out a full-scale field test on a pile to valid their numerical model, which estimates scour depth based on the observed frequency response of the pile. Bao et al. [
44] examined the effect of asymmetric scour holes using a modal analysis of tests carried out in the laboratory. Fitzgerald et al. [
45] used a cantilever-based piezoelectric energy harvesting device to detect a change in bridge frequency due to scour. Scozzese et al. [
46] proposed a mode shape-oriented identification system for detecting scour, but concluded that noise compromises the results. OBrien et al. [
47] focused on wavelet-derived operating deflection shapes from average bridge accelerations at supports, enabling the detection of scour over a range of frequencies, providing results in both the frequency and spatial domains.
As well as natural frequencies, Elsaid and Seracino [
48] examined changes in mode shape curvature and flexibility-based deflections due to scour, but report that, due to the nature of the experiment, the results are inconclusive. Xiong et al. [
49] and Xiong [
50] discussed flexibility-based deflections, mode shape curvature, frequency change ratios, and modal assurance criteria. The frequency change ratio was only effective as a potential damage indicator on single-pier bridges, and the modal assurance criteria were found to be incapable of identifying scour. Flexibility-based deflections and mode shape curvature identify the modelled presence of scour. Catbas et al. [
51] conducted a laboratory experiment where modal flexibility-based deflections and curvatures were calculated from modal frequencies and scaled mode shapes. The modelled scour was identified by an increase in the deflected shape patterns and modal curvature of the girders. Malekjafarian et al. [
52] used the ratio between mode shape amplitudes identified at two points on an integral bridge structure to detect scour, and Malekjafarian et al. [
53] evaluated a monitoring strategy based on the relative changes in pier-mode shape amplitudes based on a laboratory study.
When considering a Structural Health Monitoring plan for an individual bridge, the cost of installation and difficulty of maintaining equipment need to be offset against the benefit of planning timely, efficient, and economical repairs and having information on the bridge’s likely remaining life [
54,
55].
There has been a growing interest in indirect Structural Health Monitoring, where a passing instrumented vehicle excites the bridge and the dynamic properties of the bridge are then extracted from the dynamic response of the vehicle. These techniques include the following:
- –
The detection of a change in the bridge’s natural frequency [
56,
57,
58,
59];
- –
- –
The identification of mode shapes and modal strain energy [
63,
64,
65,
66,
67];
- –
Wavelet transform techniques [
68,
69];
- –
Using moving force identification (MFI) to calculate the expected load if the bridge is in a heathy state [
70,
71];
- –
Using Machine Learning and Artificial Neural Networks (ANNs) to predict the ‘healthy’ response of the bridge [
72,
73];
- –
Indirectly measuring the relative displacement of the bridge [
74,
75,
76,
77,
78].
Reviews of various indirect, or ‘drive-by’, bridge monitoring techniques are carried out in articles by Malekjafarian et al. [
79], Shokravi et al. [
80], and Yang and Yang [
81]. There are few indirect monitoring techniques that specifically consider scour. Fitzgerald et al. [
82] numerically investigated the feasibility of using bogie acceleration measurements from a passing train to detect the presence of bridge scour. The Continuous Wavelet Transform is used to process the simulated acceleration measurements for a number of train passages over the scoured bridge.
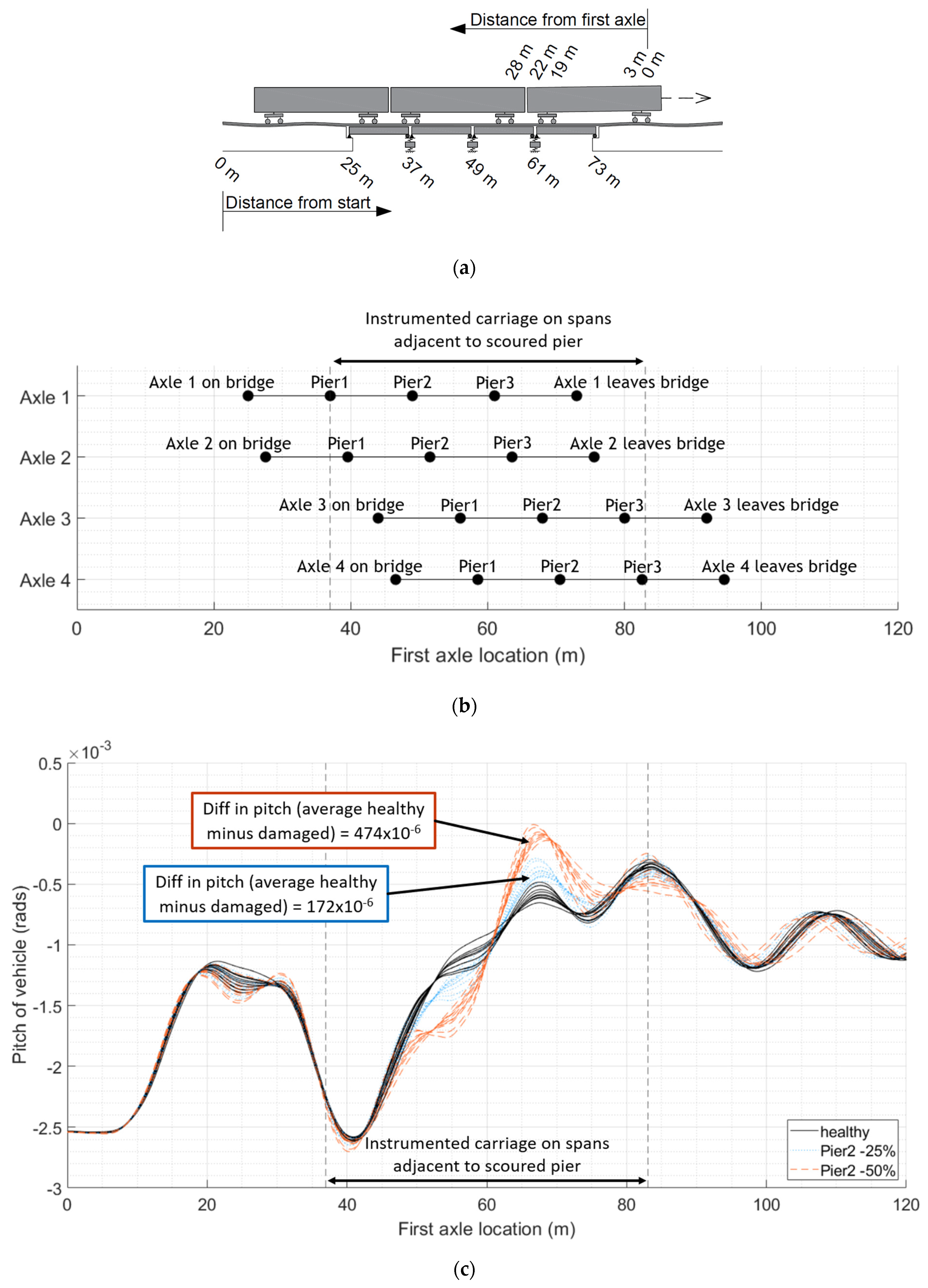
This study examines the novel concept of measuring the rotation of a vehicle body, the ‘pitch’, as it crosses a bridge, to detect a change in bridge characteristics as a result of scour. The loss of stiffness caused by the erosion of the riverbed around the pier foundations will result in a change in the movement of the pier and the bridge deck under vehicular loading. The pitch of the crossing vehicle is in response to the ‘apparent profile’ of the bridge it experiences, which consists of two components: the road or rail profile and the bridge deflections in response to the crossing vehicle. The latter deflections are affected by the bridge boundary conditions and are damage-sensitive. A two-dimensional vehicle–bridge interaction FE model is utilised here to explore this concept, followed by laboratory experiments on a scaled 5.2 m long multi-span bridge consisting of a series of four 1.3 m simply supported spans.
As the sensors are mounted on a crossing vehicle, this technique becomes very economically beneficial as it has the ability to monitor many bridges on the network, including those that it may not be economically viable to undertake direct electronic Structural Health Monitoring. This is particularly important after a large-scale flood event which may result in many bridges being immediately reclassified as a high scour risk, and many monitoring techniques, especially traditional underwater inspections, also become a high health and safety risk. This scour monitoring technique also provides information on changes to the bridge’s structural behaviour, offering a better understanding of the bridge condition than isolated information on the location and depth of scouring.
4. Further Research
This study provides the concept and preliminary validation of a new bridge condition monitoring methodology. The initial proof of concept is described in this paper. To extend this work, the authors would like to develop the laboratory testing further. Scour damage was simulated as a reduction in spring stiffness under piers of a multi-span bridge. This could be expanded in the future and modelled in the laboratory using a box of soil to support the piers, with the material being removed in a way to mimic different scouring scenarios, including lesser levels of damage. The authors would see the benefit of modelling different types of bridges and foundations, along with a different vehicle pulley system capable of travelling at higher velocities. The oscillatory nature of the measured response can be amplified or dampened by the presence of damage, particularly when combined with a track profile, as demonstrated by the numerical modelling at the start of this study (
Figure 2,
Figure 3 and
Figure 4). A track profile was not included in the laboratory tests to better understand the bridge behaviour. Future modelling will include different track profiles.
Bridge structures generally exhibit bending or arch behaviour. For both, if the foundation settles under a passing load, the effect on the carriage rotation is similar. Although the in-span behaviour may differ for different bridge types, the methodology can be extended to different types of bridges. Bridges with longer spans will have a reduced slope for a given settlement resulting from scour, which will make it harder to detect the deflection. This will be more of a challenge and will require more passes of the instrumented vehicle.
A 3D model will be developed in future research, mimicking likely bridges to be monitored. This will allow for more comprehensive and varied damage modelling to be undertaken and help to develop a regression formula for scour detection under set circumstances. With the aim of monitoring the deterioration of bridges, the methodology can be scaled up for medium-span bridges, which typically would not be bespoke structures, but are often precast and can be grouped together into those with similar designs.
The sensors used in this research are wireless Epson M-A352 triaxial accelerometers (Epson, Suwa, Japan), measuring data along three axes. This allows the rotation of the vehicle up and down to be measured, i.e., the vehicle pitch. It also measures the circular (clockwise or anticlockwise) movement of the vehicle as it moves forward, i.e., the vehicle roll. This may be an effective way of measuring potential movement of the bridge pier in the lateral direction if the pattern of scour results in one side of a pier settling.
Although the proposed methodology ultimately does not require a digital twin, which is resource-intensive to scale-up for a large quantity of bridges, it instead utilises a comparison to a healthy baseline. A disadvantage of this approach is adjusting for routine behavioural changes in the structure, for example, as a result of temperature fluctuations throughout the year. Techniques to deal with variations in parameters, such as temperature, can involve grouping together vehicle runs with similar parameters for comparison, resulting in several ‘healthy baselines’ [
85].
Scaling this methodology up for monitoring real-world bridges would require the installation of sensors on the vehicles. The sensors are installed on the carriage body of the train, which affords more protection and ease of access than installation on the bogie or axle. Within this study, slight variations in mass and the velocity of the train are included. This would be more reflective of a measurement train and not a passenger carriage, which would likely experience greater fluctuations in mass. Variations in parameters, including changes to the suspension of the vehicle over time, would need to be explored further for long-term monitoring.



 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}