
Development and Analysis of an Origami-Based Elastomeric Actuator and Soft Gripper Control with Machine Learning and EMG Sensors


Abstract
1. Introduction
2. Actuator Design and Characterization
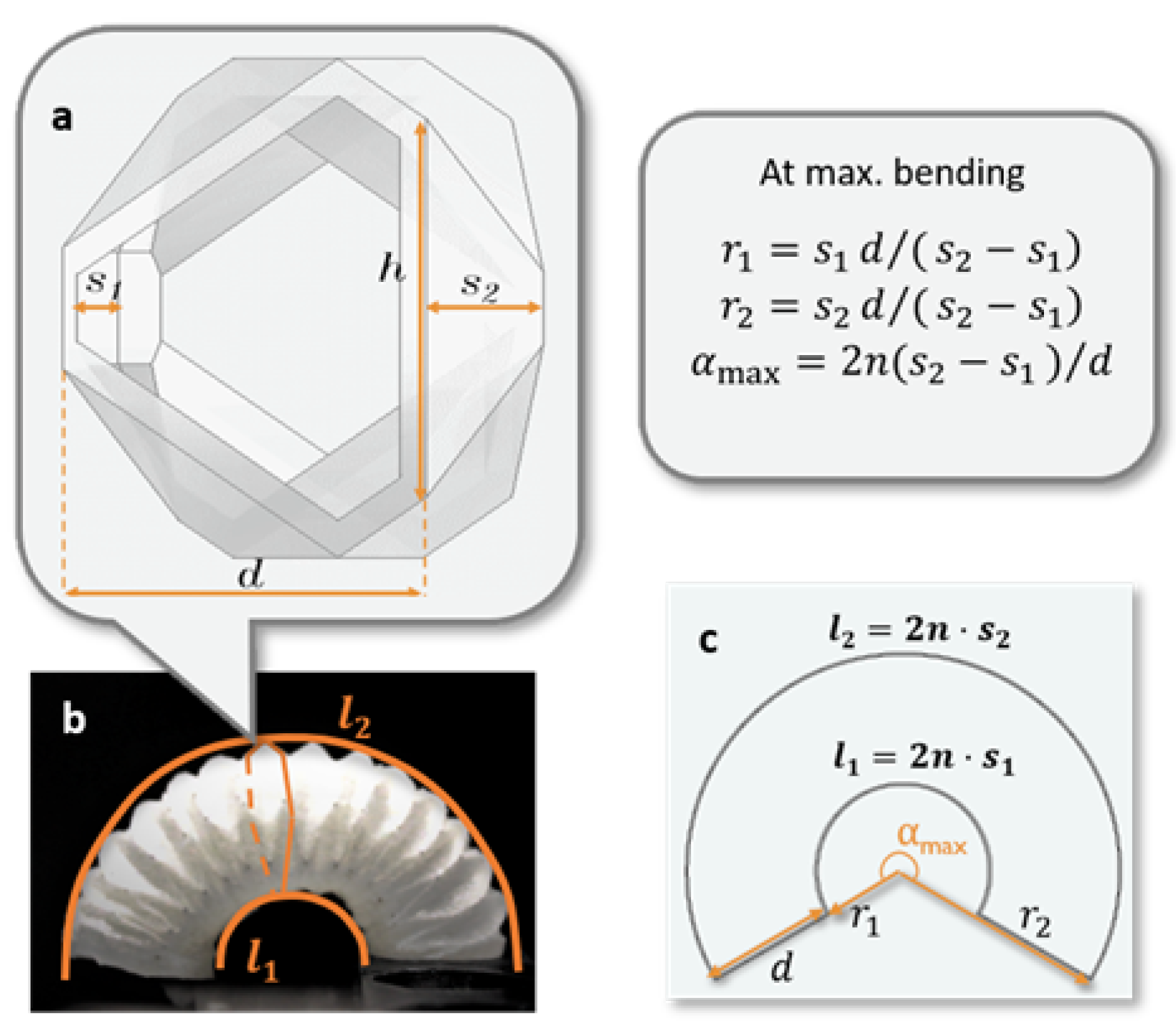
2.1. Concept and Geometric Design
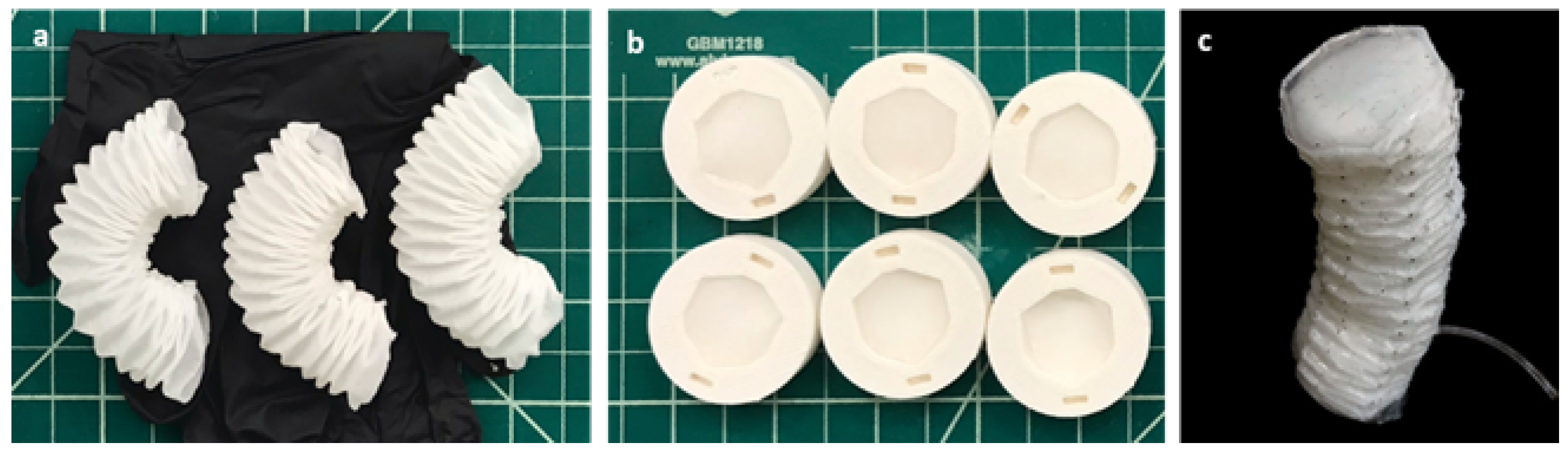
Fabrication of Actuator
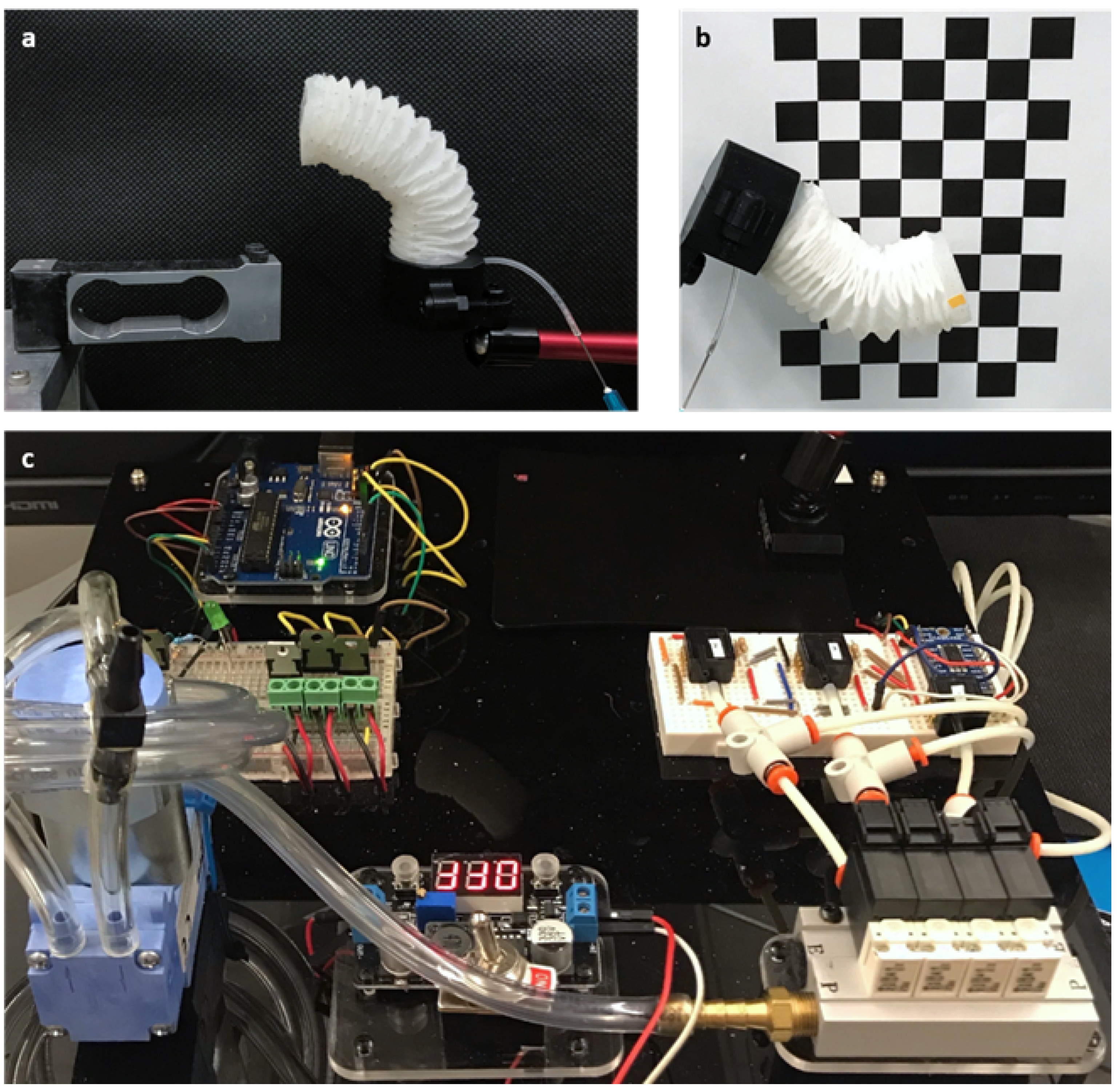
2.2. Characterization
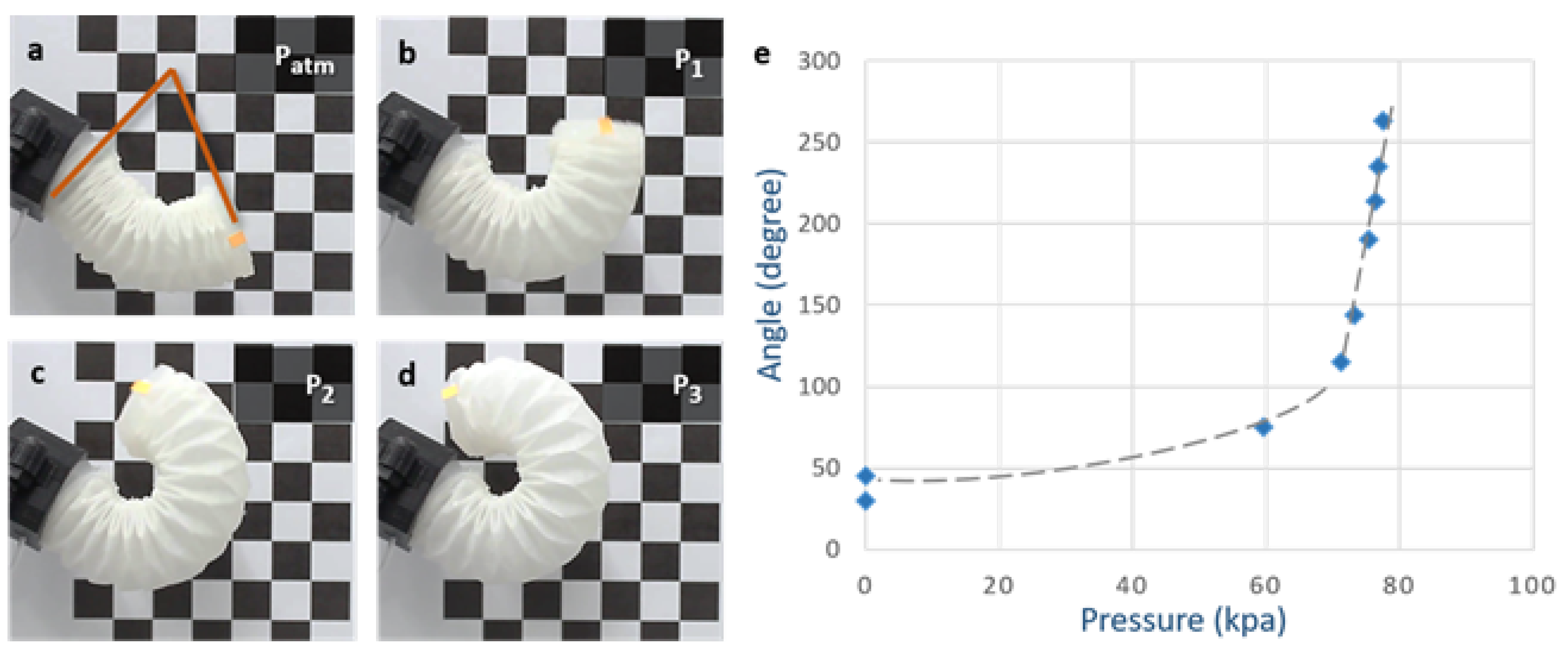
2.2.1. Pressure–Bending Angle Association
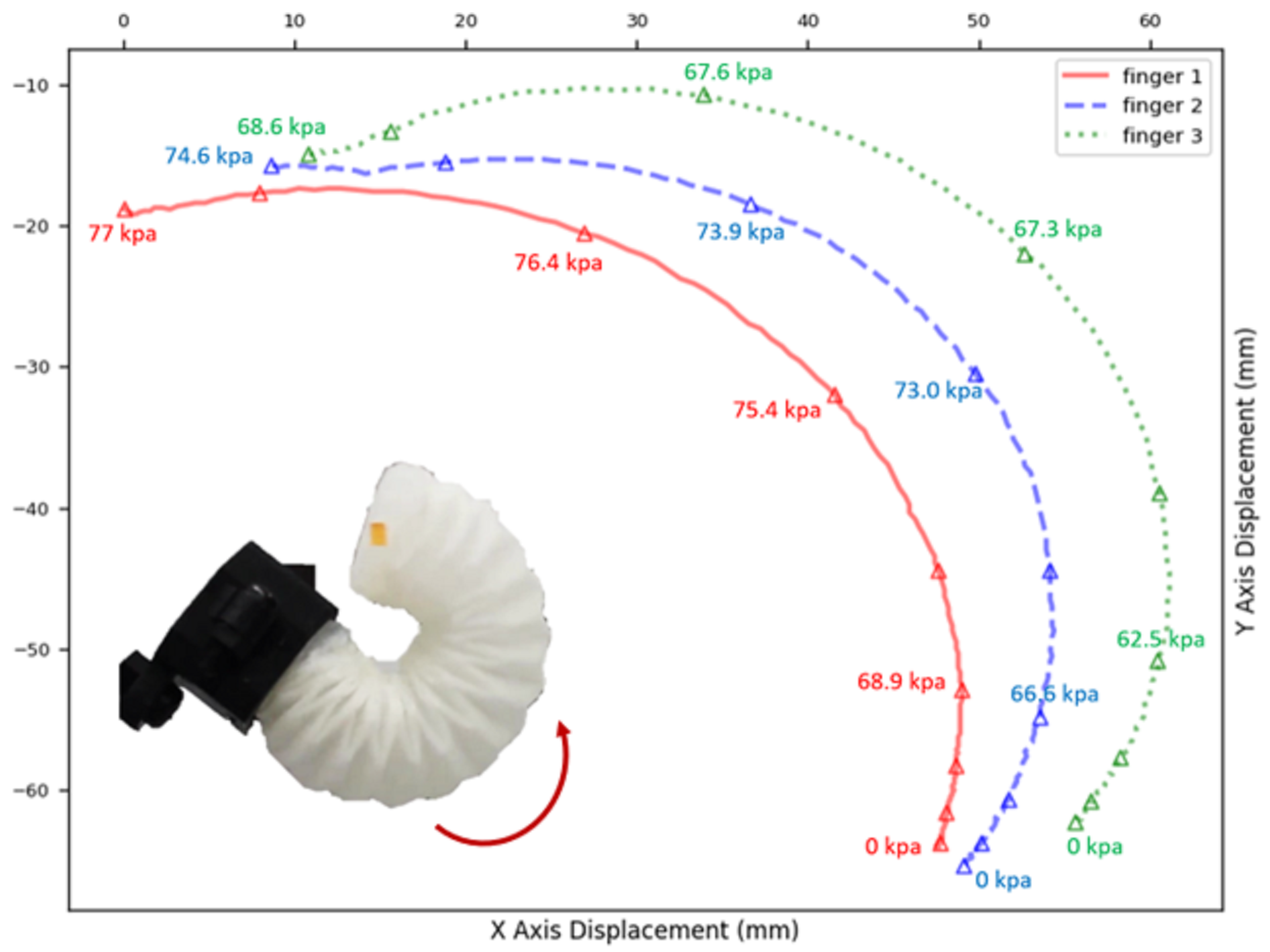
2.2.2. Pressure–Displacement Association
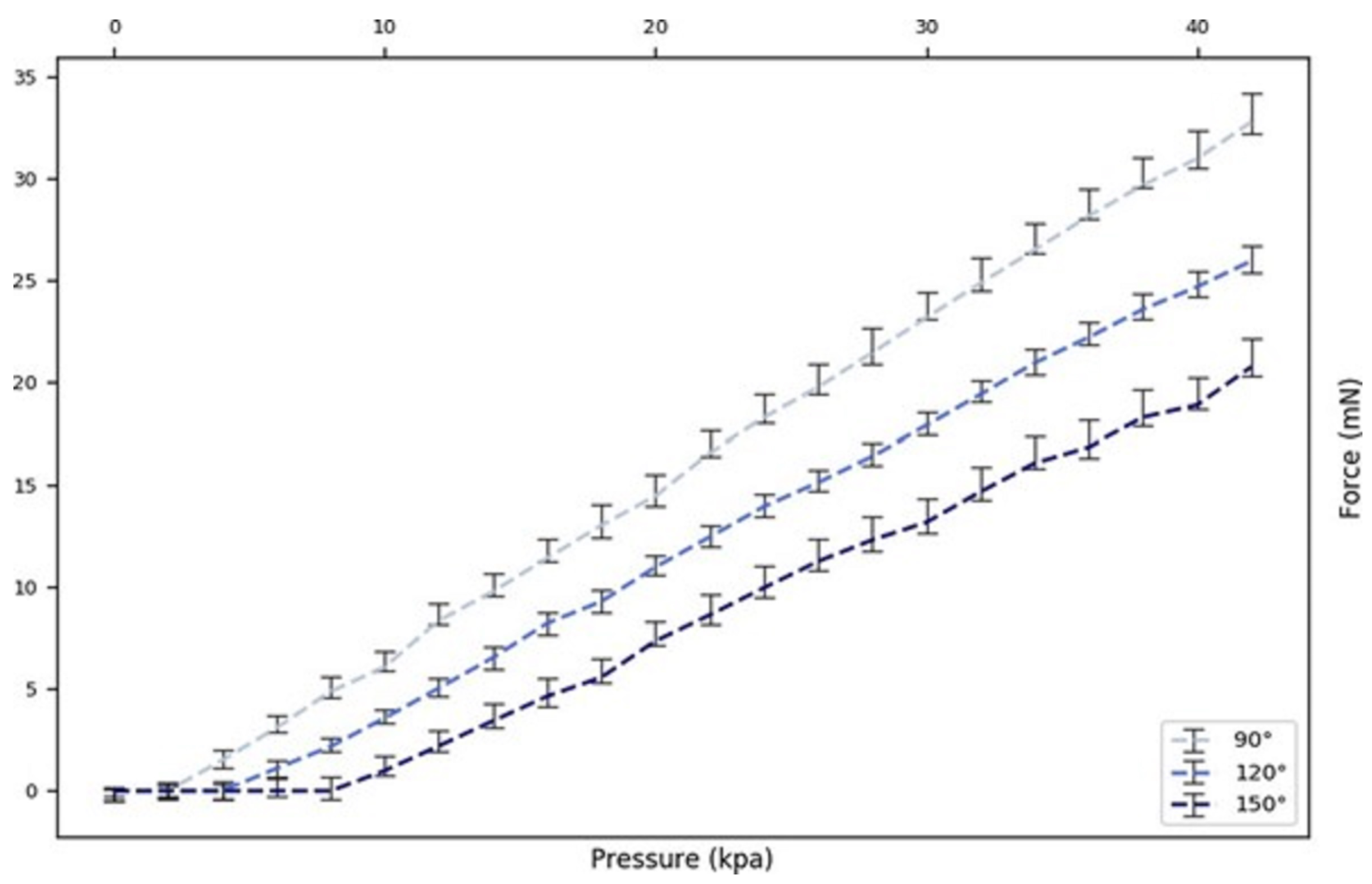
2.2.3. Pressure–Force Association
2.3. Discussion
3. Gripper Testing and Gesture Recognition
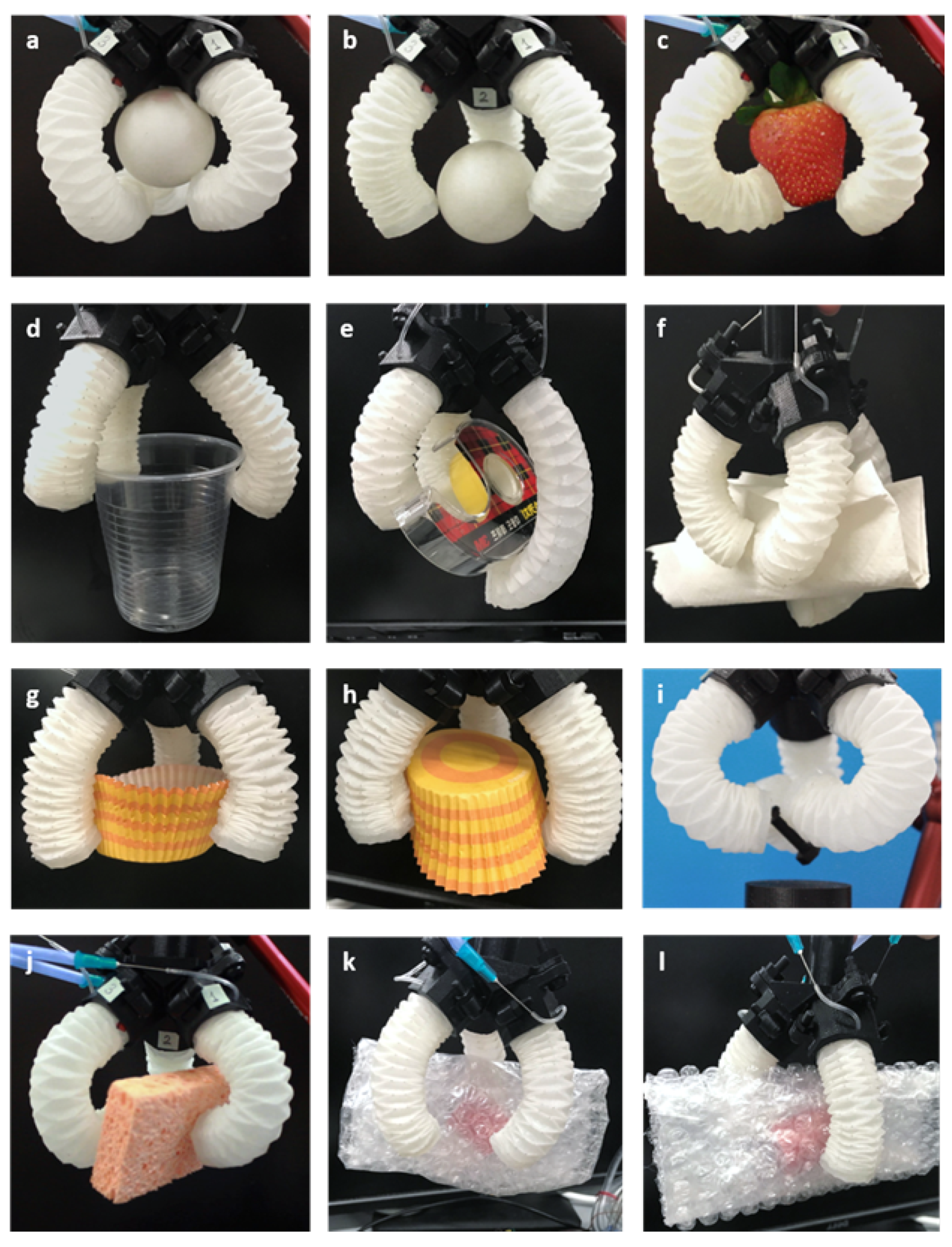
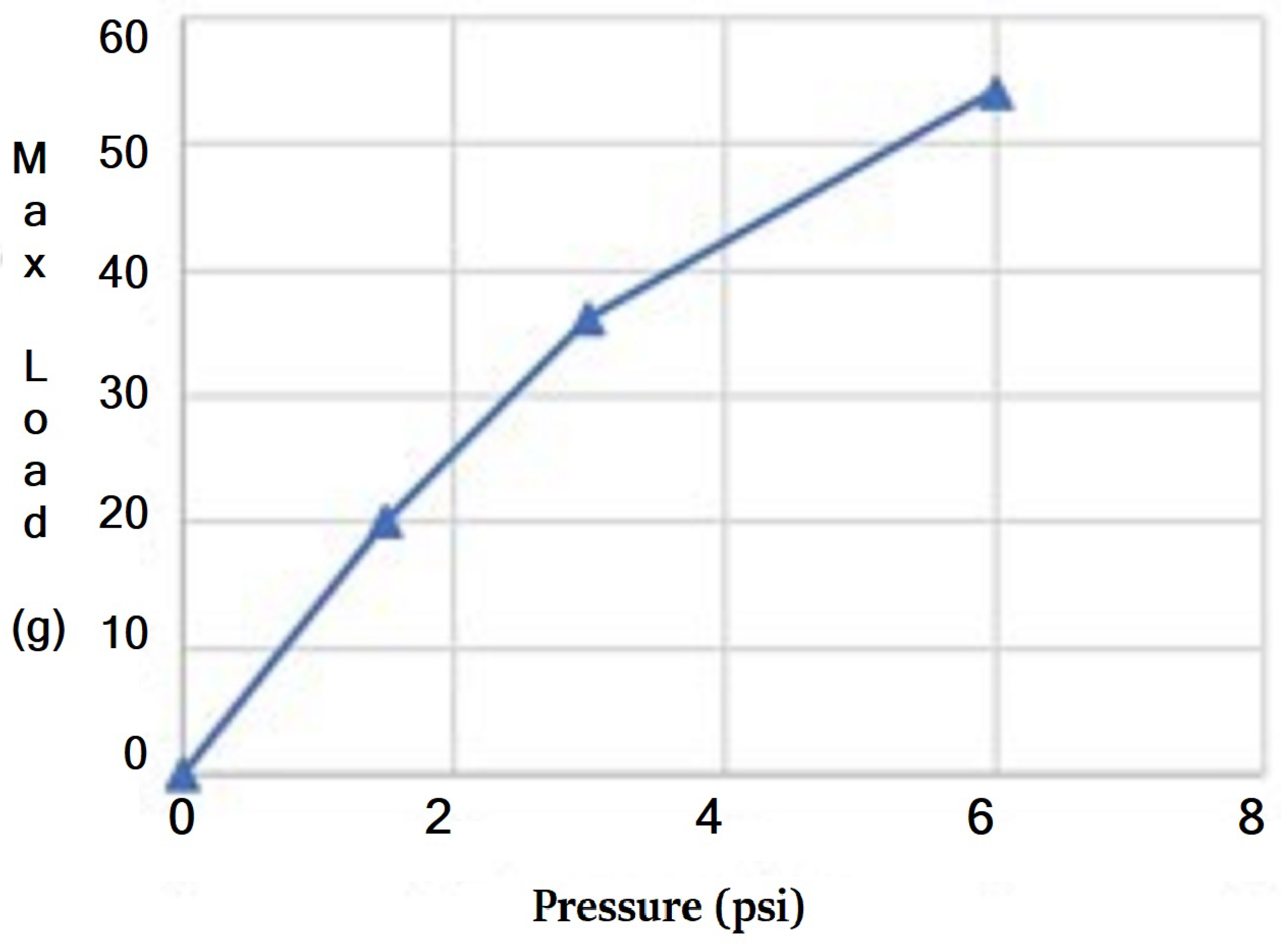
3.1. Object Gripping Capacity
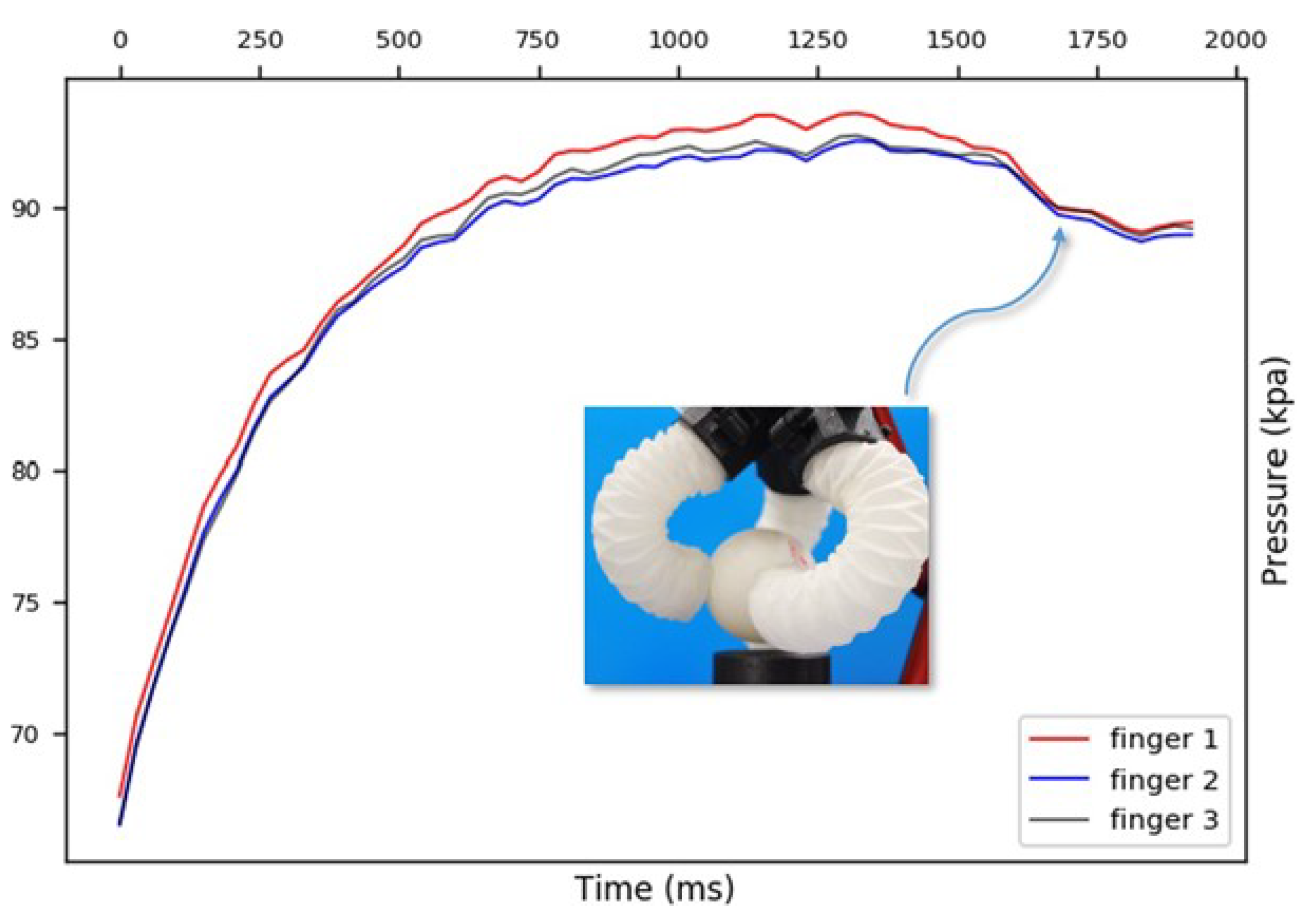
3.2. Contact Sensing
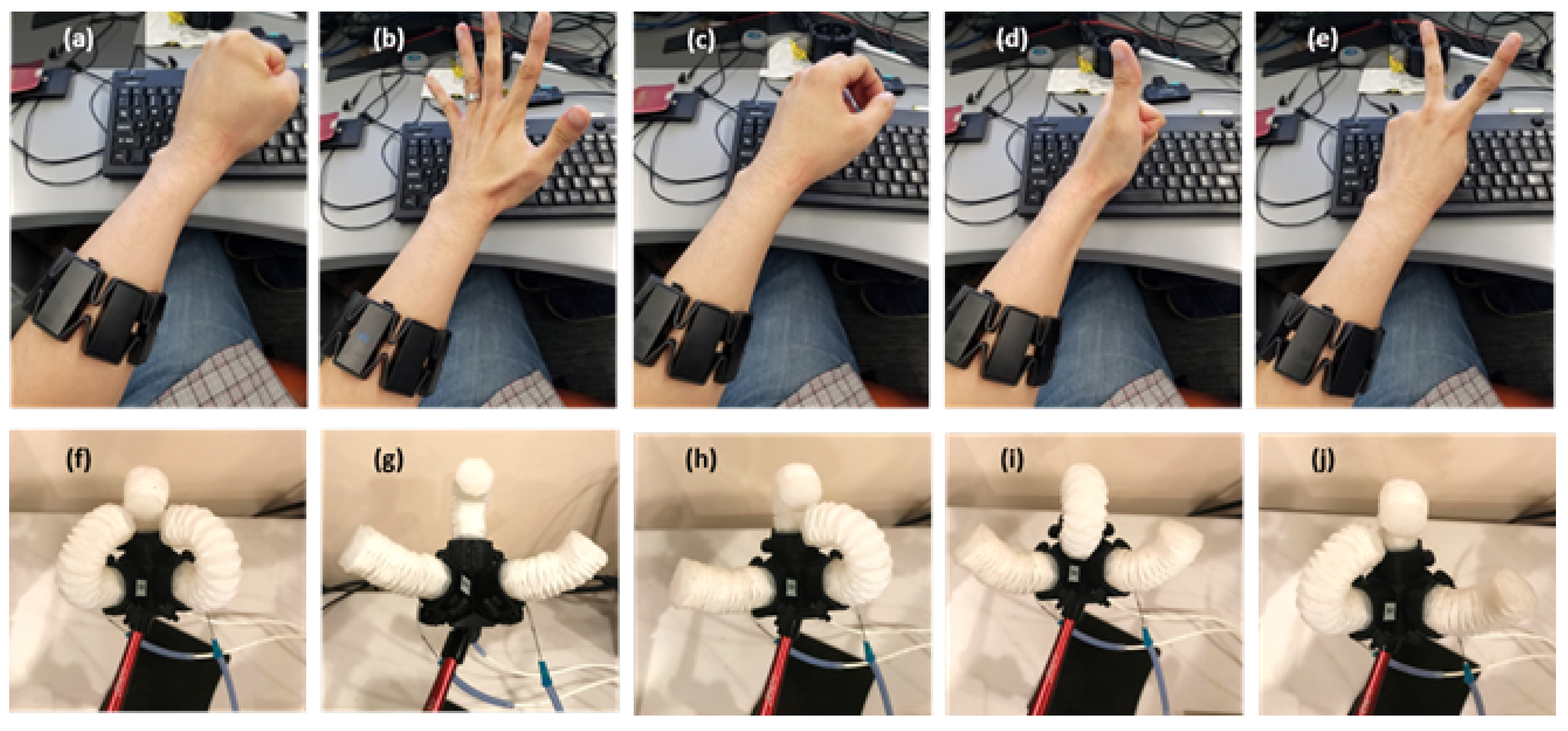
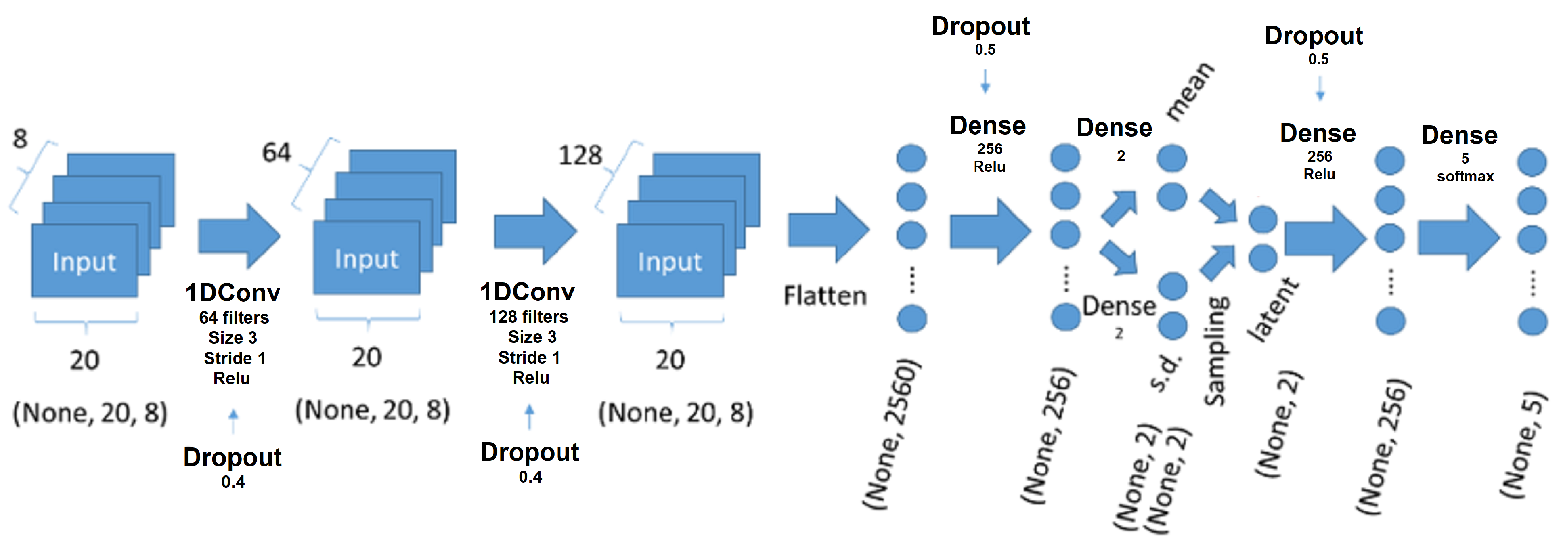
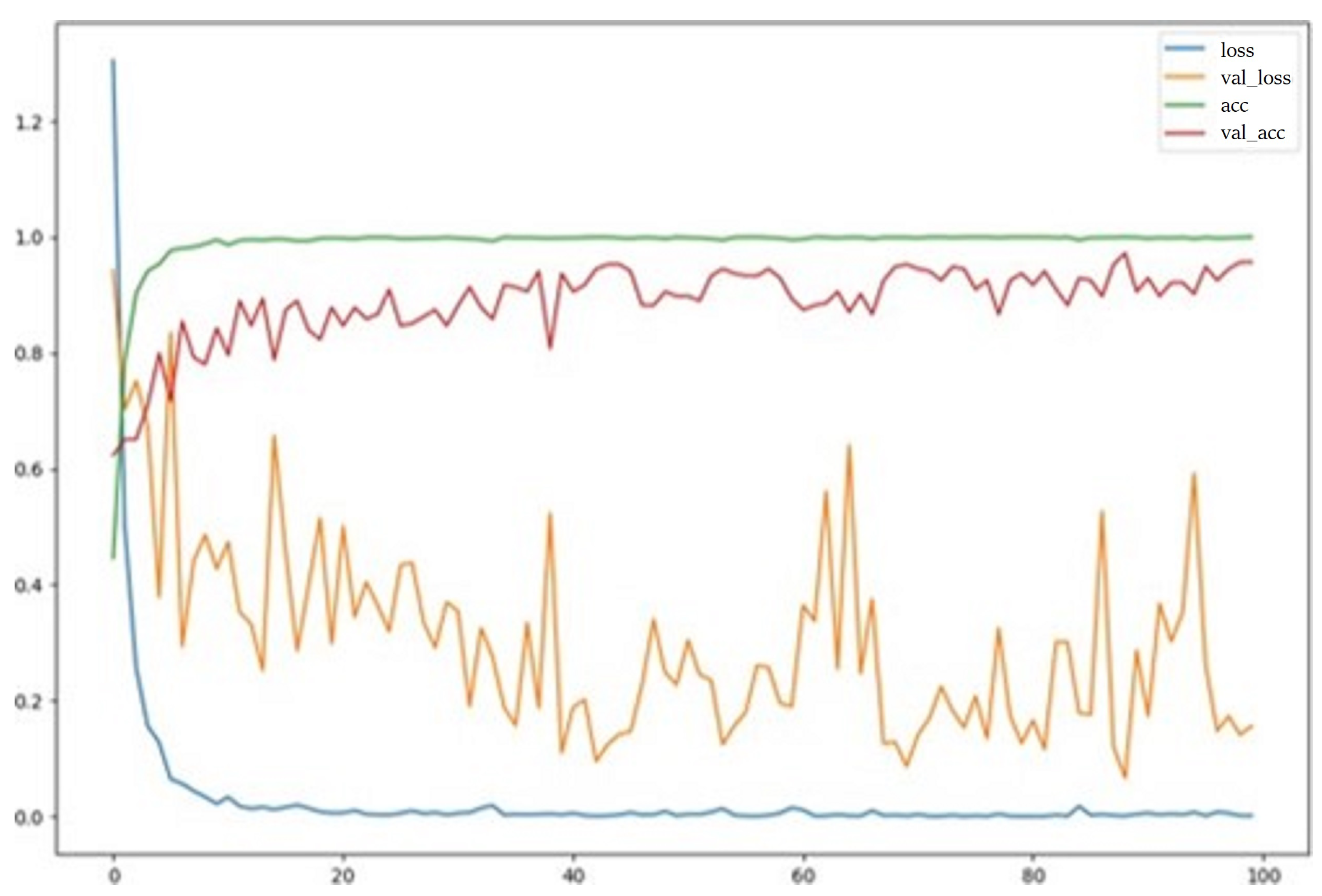
3.3. Actuating the Gripper with EMG Signals
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- De Greef, A.; Lambert, P.; Delchambre, A. Towards flexible medical instruments: Review of flexible fluidic actuators. Precis. Eng. 2009, 33, 311–321. [Google Scholar] [CrossRef]
- Howell, L.L.; Magleby, S.P.; Olsen, B.M. Handbook of Compliant Mechanisms; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Bertetto, A.M.; Ruggiu, M. A novel fluidic bellows manipulator. J. Robot. Mechatron. 2004, 16, 604–612. [Google Scholar] [CrossRef]
- Elsayed, Y.; Vincensi, A.; Lekakou, C.; Geng, T.; Saaj, C.; Ranzani, T.; Cianchetti, M.; Menciassi, A. Finite element analysis and design optimization of a pneumatically actuating silicone module for robotic surgery applications. Soft Robot. 2014, 1, 255–262. [Google Scholar] [CrossRef]
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical applications of soft robotics. Nat. Rev. Mater. 2018, 3, 143–153. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic networks for soft robotics that actuate rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Hu, W.; Mutlu, R.; Li, W.; Alici, G. A structural optimisation method for a soft pneumatic actuator. Robotics 2018, 7, 24. [Google Scholar] [CrossRef]
- Yi, J.; Chen, X.; Song, C.; Zhou, J.; Liu, Y.; Liu, S.; Wang, Z. Customizable three-dimensional-printed origami soft robotic joint with effective behavior shaping for safe interactions. IEEE Trans. Robot. 2018, 35, 114–123. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of origami robots. Nat. Rev. Mater. 2018, 3, 101–112. [Google Scholar] [CrossRef]
- Niiyama, R.; Sun, X.; Sung, C.; An, B.; Rus, D.; Kim, S. Pouch motors: Printable soft actuators integrated with computational design. Soft Robot. 2015, 2, 59–70. [Google Scholar] [CrossRef]
- Martinez, R.V.; Fish, C.R.; Chen, X.; Whitesides, G.M. Elastomeric origami: Programmable paper-elastomer composites as pneumatic actuators. Adv. Funct. Mater. 2012, 22, 1376–1384. [Google Scholar] [CrossRef]
- Terryn, S.; Brancart, J.; Lefeber, D.; Van Assche, G.; Vanderborght, B. Self-healing soft pneumatic robots. Sci. Robot. 2017, 2, eaan4268. [Google Scholar] [CrossRef]
- Wang, Z.; Torigoe, Y.; Hirai, S. A prestressed soft gripper: Design, modeling, fabrication, and tests for food handling. IEEE Robot. Autom. Lett. 2017, 2, 1909–1916. [Google Scholar] [CrossRef]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Homberg, B.S.; Katzschmann, R.K.; Dogar, M.R.; Rus, D. Haptic identification of objects using a modular soft robotic gripper. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 1698–1705. [Google Scholar]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef]
- Zhou, J.; Chen, S.; Wang, Z. A soft-robotic gripper with enhanced object adaptation and grasping reliability. IEEE Robot. Autom. Lett. 2017, 2, 2287–2293. [Google Scholar] [CrossRef]
- Amend, J.R.; Brown, E.; Rodenberg, N.; Jaeger, H.M.; Lipson, H. A positive pressure universal gripper based on the jamming of granular material. IEEE Trans. Robot. 2012, 28, 341–350. [Google Scholar] [CrossRef]
- Van Meerbeek, I.; De Sa, C.; Shepherd, R. Soft optoelectronic sensory foams with proprioception. Sci. Robot. 2018, 3, eaau2489. [Google Scholar] [CrossRef] [PubMed]
- Mengüç, Y.; Park, Y.L.; Pei, H.; Vogt, D.; Aubin, P.M.; Winchell, E.; Fluke, L.; Stirling, L.; Wood, R.J.; Walsh, C.J. Wearable soft sensing suit for human gait measurement. Int. J. Robot. Res. 2014, 33, 1748–1764. [Google Scholar] [CrossRef]
- Zhao, H.; Jalving, J.; Huang, R.; Knepper, R.; Ruina, A.; Shepherd, R. A helping hand: Soft orthosis with integrated optical strain sensors and EMG control. IEEE Robot. Autom. Mag. 2016, 23, 55–64. [Google Scholar] [CrossRef]
- Jianguo, C.; Xiaowei, D.; Jian, F. Morphology analysis of a foldable kirigami structure based on Miura origami. Smart Mater. Struct. 2014, 23, 094011. [Google Scholar] [CrossRef]
- Pagano, A.; Yan, T.; Chien, B.; Wissa, A.; Tawfick, S. A crawling robot driven by multi-stable origami. Smart Mater. Struct. 2017, 26, 094007. [Google Scholar] [CrossRef]
- Onal, C.D.; Wood, R.J.; Rus, D. An origami-inspired approach to worm robots. IEEE/ASME Trans. Mechatron. 2012, 18, 430–438. [Google Scholar] [CrossRef]
- Jeong, D.; Lee, K. Design and analysis of an origami-based three-finger manipulator. Robotica 2018, 36, 261–274. [Google Scholar] [CrossRef]
- Liu, S.; Lu, G.; Chen, Y.; Leong, Y.W. Deformation of the Miura-ori patterned sheet. Int. J. Mech. Sci. 2015, 99, 130–142. [Google Scholar] [CrossRef]
- Li, S.; Stampfli, J.J.; Xu, H.J.; Malkin, E.; Diaz, E.V.; Rus, D.; Wood, R.J. A vacuum-driven origami “magic-ball” soft gripper. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7401–7408. [Google Scholar]
- Ghassaei, A. Origami Simulator. Online. 2017. Available online: http://apps.amandaghassaei.com/OrigamiSimulator (accessed on 10 May 2020).
- Sun, Y.; Li, D.; Wu, M.; Yang, Y.; Su, J.; Wong, T.; Xu, K.; Li, Y.; Li, L.; Yu, X.; et al. Origami-inspired folding assembly of dielectric elastomers for programmable soft robots. Microsyst. Nanoeng. 2022, 8, 37. [Google Scholar] [CrossRef]
- Ngeo, J.G.; Tamei, T.; Shibata, T. Continuous and simultaneous estimation of finger kinematics using inputs from an EMG-to-muscle activation model. J. Neuroeng. Rehabil. 2014, 11, 1–14. [Google Scholar] [CrossRef]
- Pratt, N.E. Anatomy and Kinesiology of the Hand. In Rehabilitation of the Hand and Upper Extremity, 2-Volume Set; Elsevier: Amsterdam, The Netherlands, 2011; pp. 3–17. [Google Scholar]
- Kiguchi, K.; Imada, Y.; Liyanage, M. EMG-based neuro-fuzzy control of a 4DOF upper-limb power-assist exoskeleton. In Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 3040–3043. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuator 1 (the Pyramid Robot) [29] | Actuator 2 (Pneu-Net) [6] | Actuator 3 (the Pleated Structure) [11] | The Proposed Actuator | |
|---|---|---|---|---|
| Energy source | Electrical | Pneumatical | Pneumatical | Pneumatical |
| Material | Dielectric elastomers | Silicon rubber | Paper–elastomer composite | Paper–elastomer composite |
| Pattern | N/A | Connected chambers on an inextensible layer | Yoshimura pattern | Modified Yoshimura pattern |
| Weight | 2.44 g | More than 15 g | 8.3 g | ~10 g |
| Motion | Bend 120° | Bend 360° and radical expansion | Bend 360° extend | Bend 360° to form a gripper |
| Actuation speed | 2–3 s | 50 ms when pressurized at 345 KPa | 352 ms when pressurized at 60 KPa | 50 ms when pressurized at 24 L/min |
| Force exerted | 0.06 N | ~1.4 N | Unknown | 0.6 N |
| Symbol | Meaning | Value |
|---|---|---|
| Distance between inner pleats (glued) | 2 mm | |
| Outer pleat width | 5 mm | |
| d | Distance between edges of outer and inner pleats | 15 mm |
| h | Fold length | 17.3 mm |
| n | Number of pleats | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Lee, W.; Shu, L.; Kim, Y.S.; Park, C.H. Development and Analysis of an Origami-Based Elastomeric Actuator and Soft Gripper Control with Machine Learning and EMG Sensors. Sensors 2024, 24, 1751. https://doi.org/10.3390/s24061751
Wang M, Lee W, Shu L, Kim YS, Park CH. Development and Analysis of an Origami-Based Elastomeric Actuator and Soft Gripper Control with Machine Learning and EMG Sensors. Sensors. 2024; 24(6):1751. https://doi.org/10.3390/s24061751
Chicago/Turabian StyleWang, Meixin, Wonhyong Lee, Liqi Shu, Yong Sin Kim, and Chung Hyuk Park. 2024. "Development and Analysis of an Origami-Based Elastomeric Actuator and Soft Gripper Control with Machine Learning and EMG Sensors" Sensors 24, no. 6: 1751. https://doi.org/10.3390/s24061751
APA StyleWang, M., Lee, W., Shu, L., Kim, Y. S., & Park, C. H. (2024). Development and Analysis of an Origami-Based Elastomeric Actuator and Soft Gripper Control with Machine Learning and EMG Sensors. Sensors, 24(6), 1751. https://doi.org/10.3390/s24061751