
Fuzzy Neural Network PID-Based Constant Deceleration Control for Automated Mine Electric Vehicles Using EMB System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- A constant deceleration control architecture based on a dynamic model of an electro-mechanical braking actuator is proposed, which utilized a deceleration sensor to conduct a closed-loop deceleration control system.
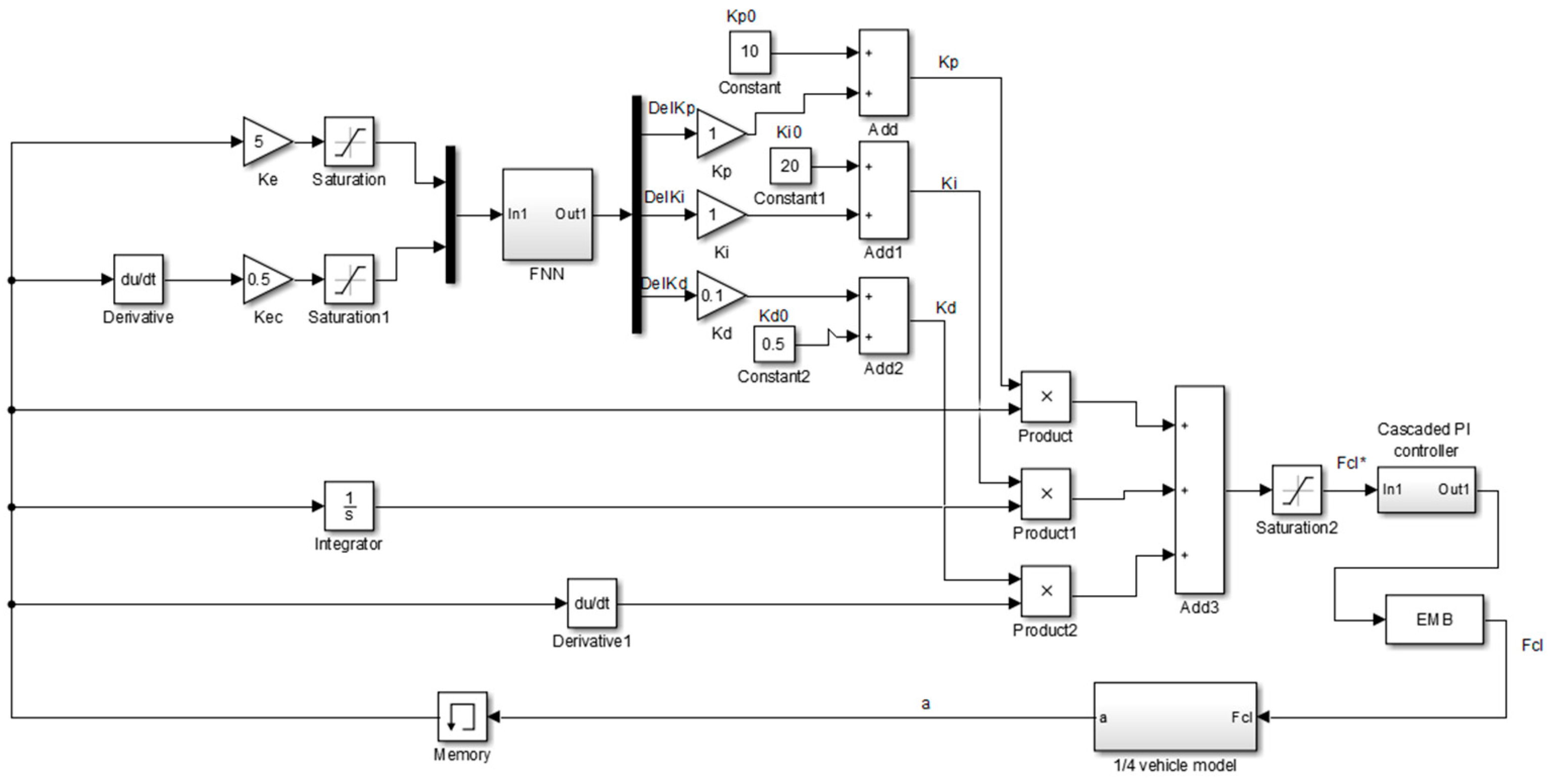
- A fuzzy neural network (FNN) deceleration control algorithm is proposed, where the fuzzy neural network unit can adaptively calculate the changing value to adjust gain parameters of the PID controller.
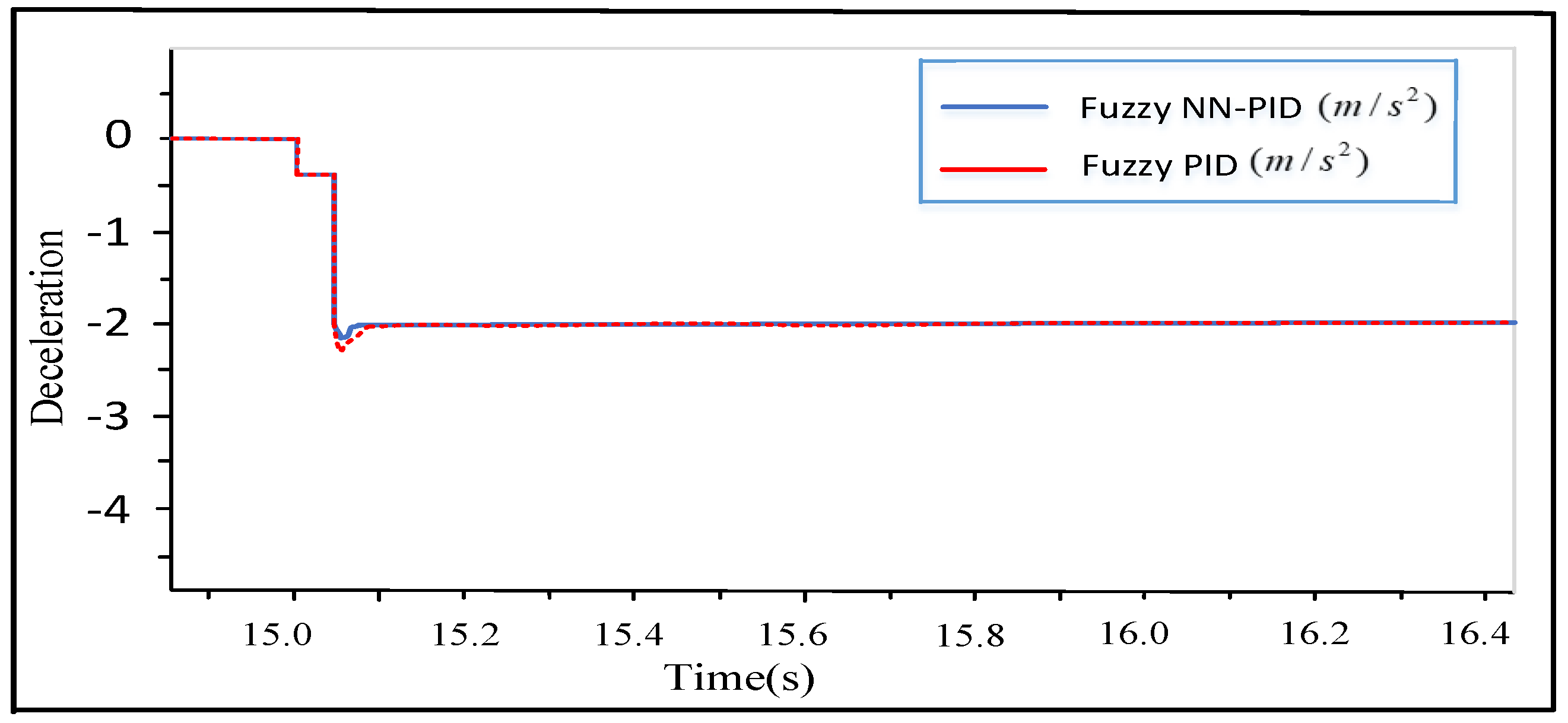
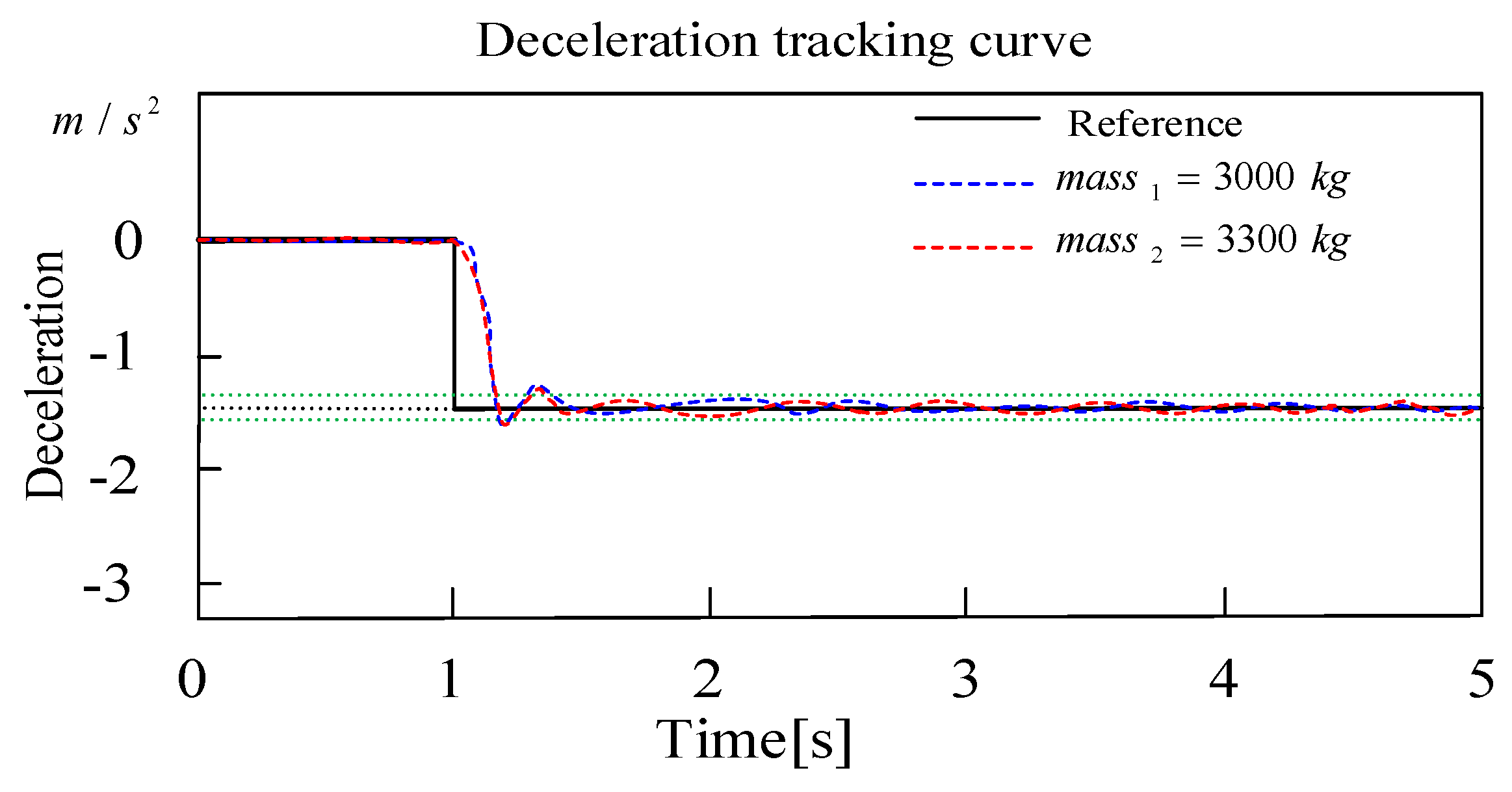
- The deceleration curve is proved by simulation to be relatively smoother in the normal braking process.
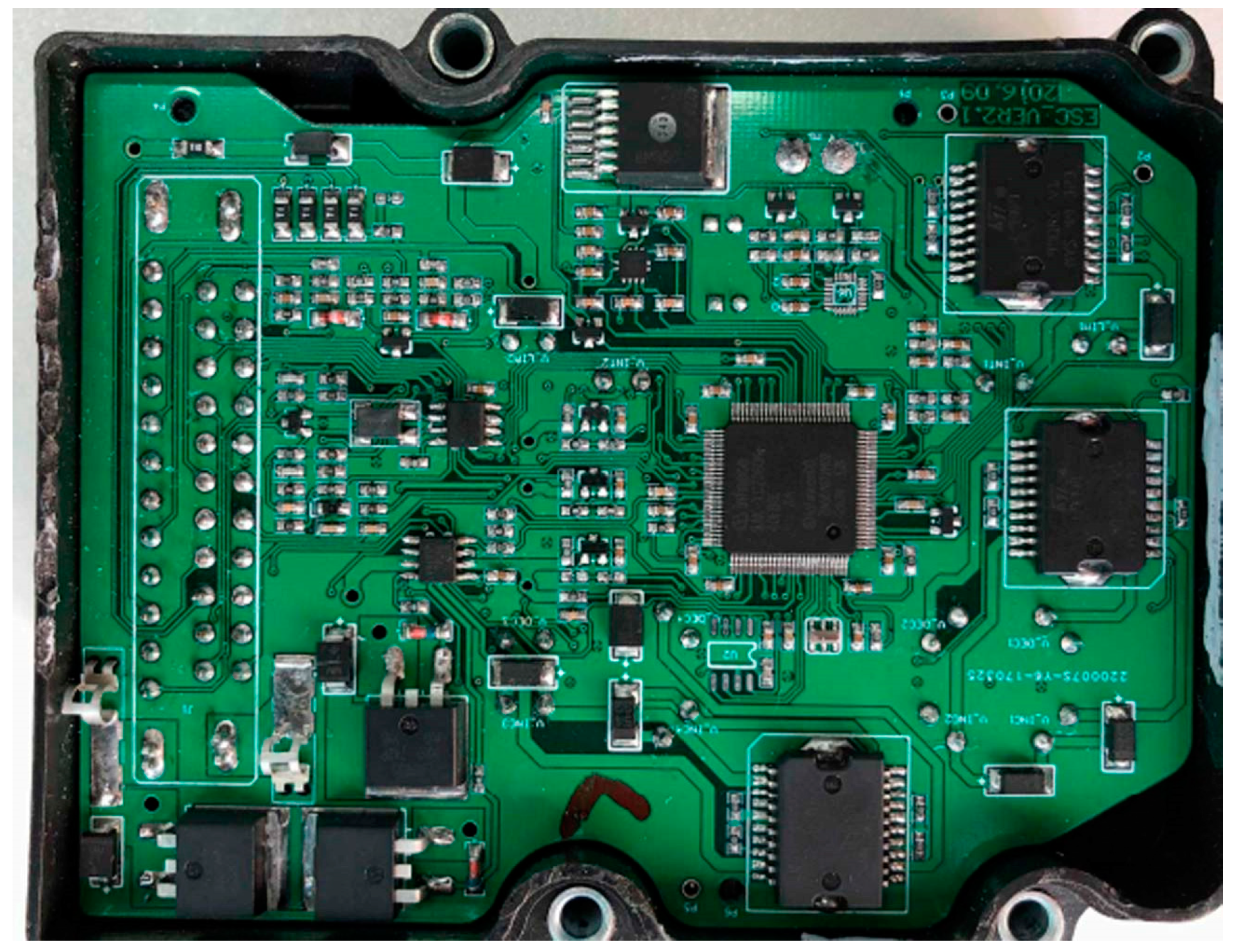
- A practical ECU with explosion-proof processing for deceleration braking control is developed and tested in a real UETRV on a test road, which can prove the stable deceleration rate performance of our proposed control strategy.
2. The Architecture and Working Principle of Active Deceleration Control Systems in UETRV
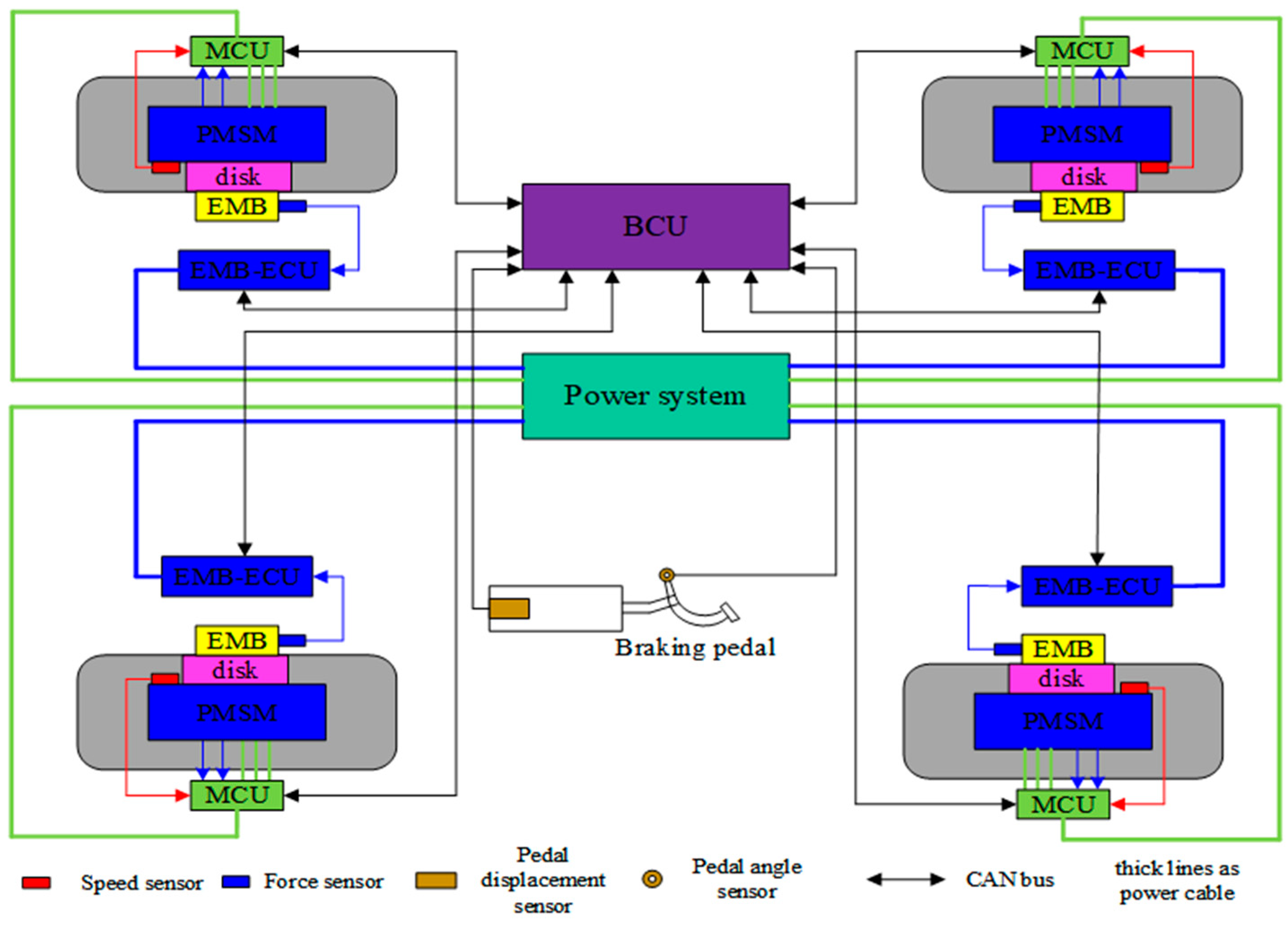
2.1. Active Braking System Architecture with EMB Actuator
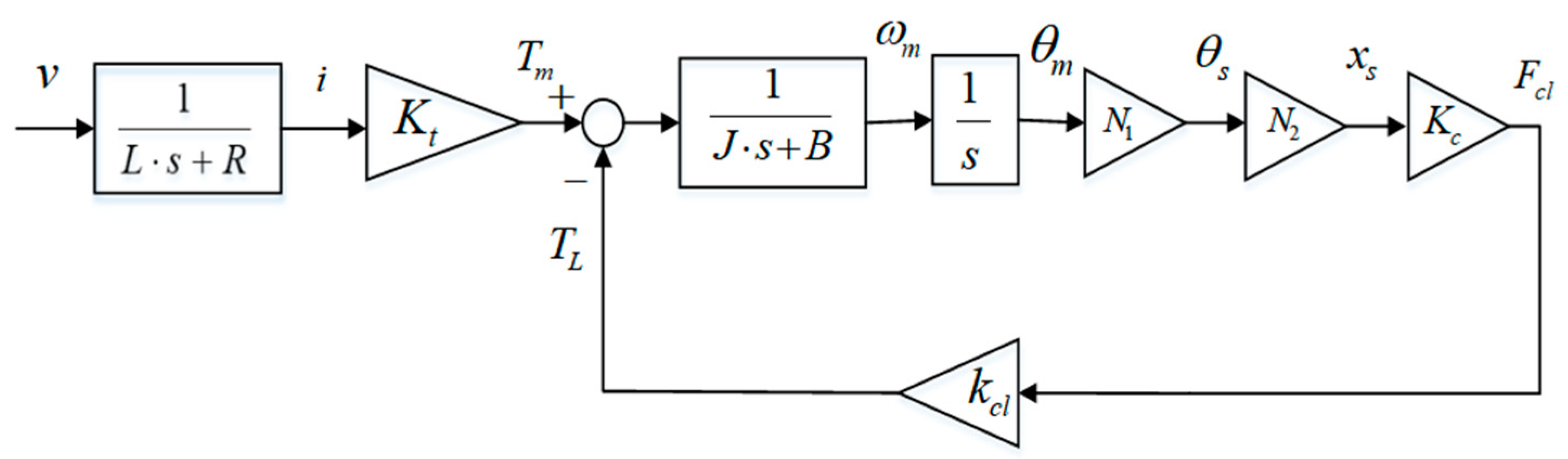
2.2. Simple Model of Single EMB Actuator
2.2.1. Model of Torque Motor
2.2.2. Modeling of Mechanical Components
- (1)
- Transmission mechanism
- (2)
- Load model
- (3)
- Braking disc model
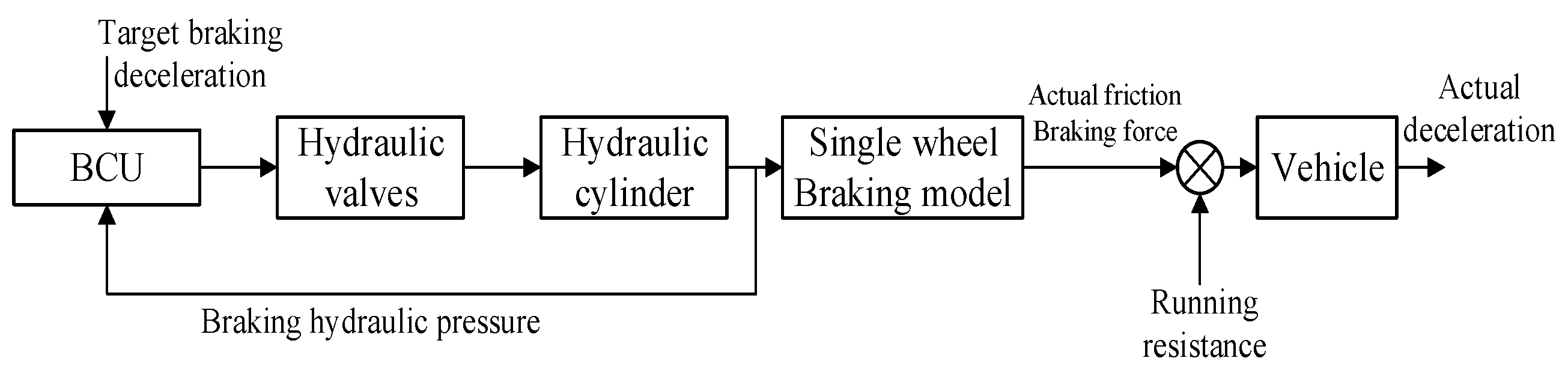
2.3. Principle of Active Deceleration Control for EMB System
3. Closed-Loop Control Strategies of Constant Deceleration Based on Fuzzy Neural-Network PID
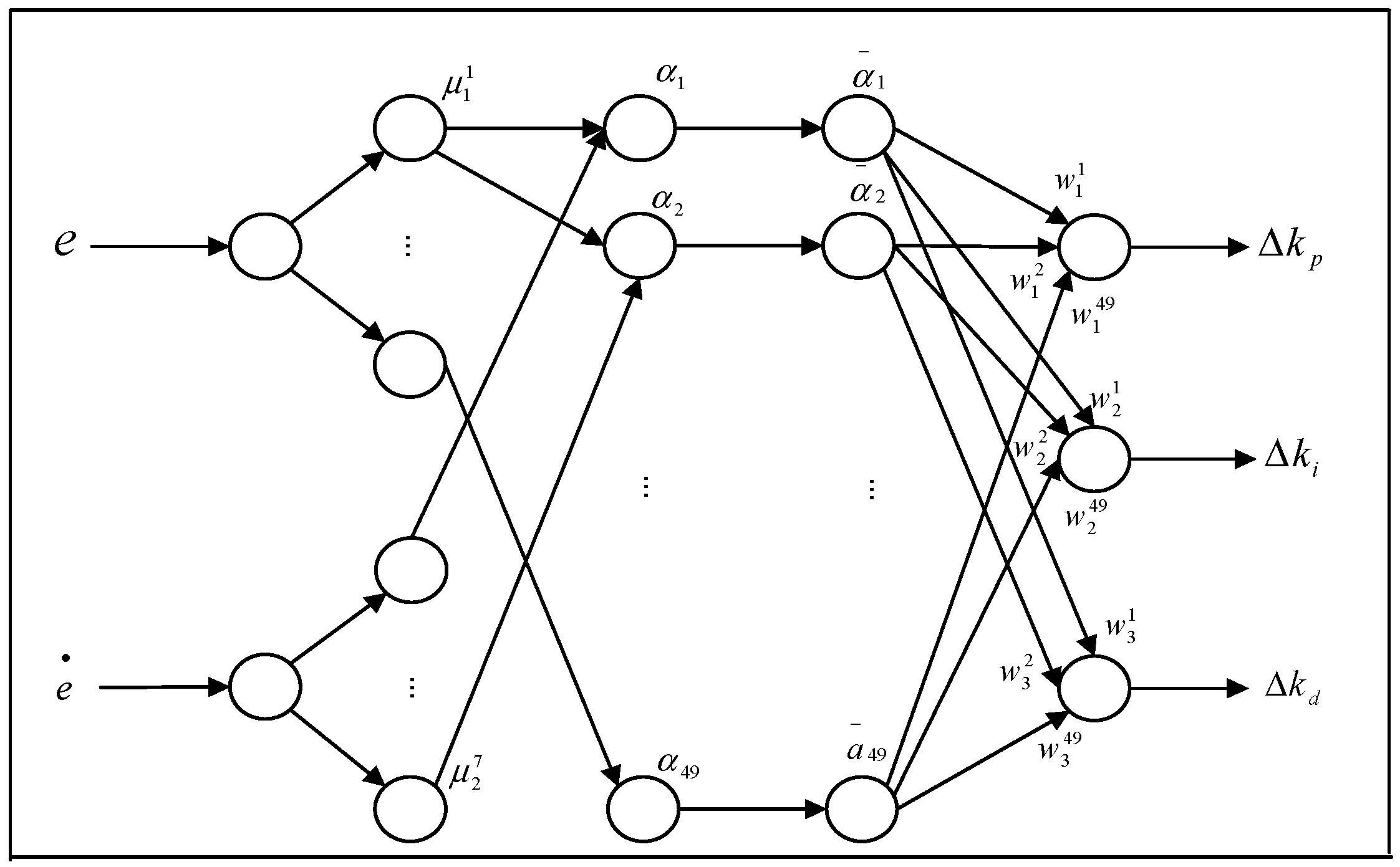
3.1. Fuzzy Neural Network-Based PID Deceleration Controller Design
3.2. Training of the Neural Network
4. Simulated Results and Discussion
4.1. Simulation Platform
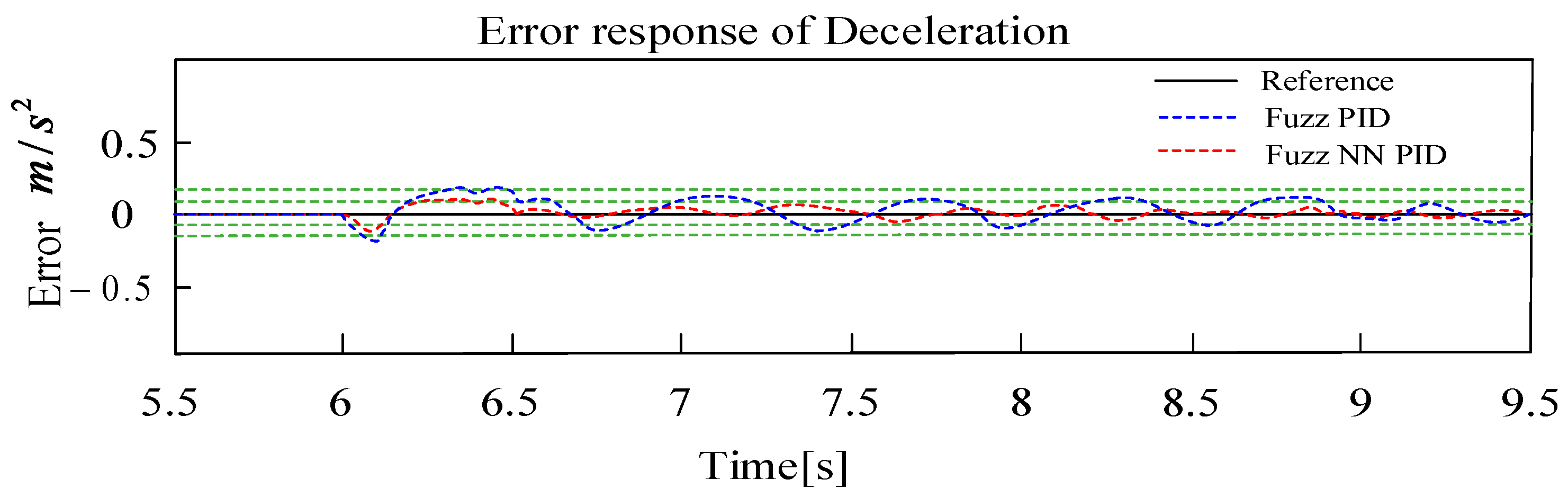
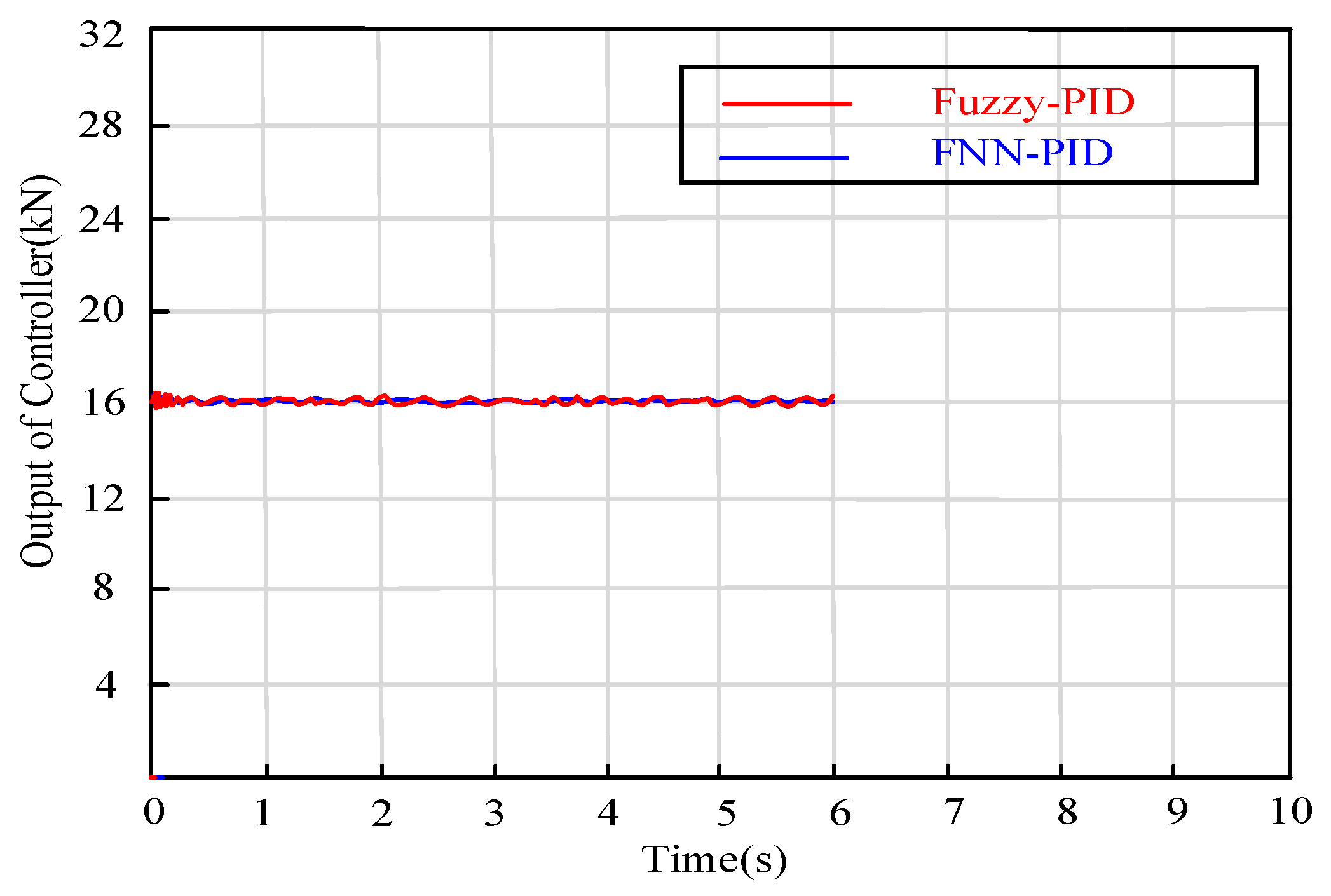
4.2. Simulation Results and Discussion
5. Experimental Test Results and Discussion
5.1. Deceleration Sensor Arrangement
5.2. Experimental Test Result and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, M.; Chen, C.; Tian, C.; Zhou, J. Precise Train Stopping Algorithm Based on Deceleration Control. In Proceedings of the 2020 IEEE 5th International Conference on Intelligent Transportation Engineering (ICITE), Beijing, China, 11–13 September 2020; pp. 281–284. [Google Scholar] [CrossRef]
- Wang, Y.; Wen, X.; Meng, H.; Zhang, X.; Li, R.; Serra, R. Accuracy Improvement of Braking Force via Deceleration Feedback Functions Applied to Braking Systems. Sensors 2023, 23, 5975. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Zhou, Y.; Di, Y. Research on Constant Deceleration Braking Performance of the Disc Braking System for Ultra Deep Mine Hoist. In Proceedings of the 2018 10th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Changsha, China, 10–11 February 2018; pp. 52–55. [Google Scholar] [CrossRef]
- Ma, C.; Tian, S.; Xiao, X.; Jiang, Y. Fuzzy Neural Network PID–based constant deceleration compensation device for the brakes of mining hoists. Adv. Mech. Eng. 2020, 12, 1687814020937568. [Google Scholar] [CrossRef]
- Ma, T.; Tian, C.; Wu, M.; Zhou, J.; Liu, Y. A Practical Deceleration Control Method, Prototype Implementation and Test Verification for Rail Vehicles. Actuators 2023, 12, 128. [Google Scholar] [CrossRef]
- Lee, N.J.; Kang, C.G. The Effect of a Variable Disc Pad Friction Coefficient for the Mechanical Brake System of a Railway Vehicle. PLoS ONE 2015, 10, e0135459. [Google Scholar] [CrossRef] [PubMed]
- Lee, N.J.; Kang, C.G. Sliding mode control for wheel slide protection in railway vehicles with pneumatic brake systems. Int. J. Precis. Eng. Manuf. 2017, 18, 285–291. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, M.; He, Z.; Yao, C.; Wei, Y.; He, L. A Fuzzy-based Sliding Mode Control Approach for Acceleration Slip Regulation of Battery Electric Vehicle. Chin. J. Mech. Eng. 2022, 35, 72. [Google Scholar] [CrossRef]
- Dias, J.E.A.; Pereira, G.A.S.; Palhares, R.M. Longitudinal Model Identification and Velocity Control of an Autonomous Car. IEEE Trans. Intell. Transp. Syst. 2015, 16, 776–786. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H.; Song, Z.; Chen, K.; Tang, Y. Accurate and Smooth Speed Control for an Autonomous Vehicle. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1976–1982. [Google Scholar] [CrossRef]
- Suid, M.H.; Ahmad, M.A. Optimal tuning of sigmoid PID controller using Nonlinear Sine Cosine Algorithm for the Automatic Voltage Regulator system. ISA Trans. 2022, 128 Pt B, 265–286. [Google Scholar] [CrossRef]
- Jafarzadeh, S.; Mirheidari, R.; Motlagh, M.R.J.; Barkhordari, M. Designing PID and BELBIC controllers in path tracking and collision problem in automated highway systems. In Proceedings of the 2008 10th International Conference on Control, Automation, Robotics and Vision, Hanoi, Vietnam, 17–20 December 2008; pp. 1562–1566. [Google Scholar] [CrossRef]
- Ghazali, M.R.; Ahmad, M.A.; Raja Ismail, R.M.T.; Tokhi, M.O. An improved neuroendocrine–proportional –integral–derivative controller with sigmoid-based secretion rate for nonlinear multi-input–multi-out put crane systems. J. Low Freq. Noise Vib. Act. Control. 2020, 39, 1172–1186. [Google Scholar] [CrossRef]
- Hassan, A.; Pillay, N. Hybrid metaheuristics: An automated approach. Expert Syst. Appl. 2019, 130, 132–144. [Google Scholar] [CrossRef]
- Mu, H.; Li, L.; Mei, M.; Zhao, Y. A Hierarchical Control Scheme for Adaptive Cruise Control System Based on Model Predictive Control. Actuators 2023, 12, 249. [Google Scholar] [CrossRef]
- Wang, H.; Zuo, Z.; Wang, Y.; Yang, H.; Hu, C. Longitudinal Velocity Regulation of UGVs: A Composite Control Approach for Acceleration and Deceleration. IEEE Trans. Intell. Transp. Syst. 2023, 24, 11096–11106. [Google Scholar] [CrossRef]
- Long, M.; Jing, H. Active Deceleration Control of Brake-By-Wire System. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 5523–5527. [Google Scholar] [CrossRef]
- Frej, D.; Grabski, P.; Jurecki, R.S.; Szumska, E.M. Experimental Study on Longitudinal Acceleration of Urban Buses and Coaches in Different Road Maneuvers. Sensors 2023, 23, 3125. [Google Scholar] [CrossRef] [PubMed]
- Nie, Y.; Liu, Y.; Cheng, S.; Mei, M.; Xiao, L. Unified Brake Service by a Hierarchical Controller for Active Deceleration Control in an Electric and Automated Vehicle. Energies 2017, 10, 2052. [Google Scholar] [CrossRef]
- Zhao, Y.-Q.; Li, H.-Q.; Lin, F.; Wang, J.; Ji, X.-W. Estimation of Road Friction Coefficient in Different Road Conditions Based on Vehicle Braking Dynamics. Chin. J. Mech. Eng. 2017, 30, 982–990. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Sun, K.; Yu, Z.P. Estimation of maximum road friction coefficient based on Lyapunov method. Int. J. Automot. Technol. 2016, 17, 991–1002. [Google Scholar] [CrossRef]
- Chikhalikar, S.; Khandekar, O.; Bhattacharya, C. Design of Real-Time Acquisition and Filtering for MEMS-based Accelerometer Data in Microcontroller. In Proceedings of the 2018 IEEE Electron Devices Kolkata Conference (EDKCON), Kolkata, India, 24–25 November 2018; pp. 15–18. [Google Scholar] [CrossRef]
- Yu, Z.; Hou, X.; Leng, B.; Huang, Y. Mass estimation method for intelligent vehicles based on fusion of machine learning and vehicle dynamic model. Auton. Intell. Syst. 2022, 2, 4. [Google Scholar] [CrossRef]
- Feng, B.; Yin, G.; Ren, Y.; Shen, T.; Wang, F. A Joint Vehicle Mass and Road Slope Estimation of Distributed Drive Electric Vehicles Considering Road Environment Factors. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 817–824. [Google Scholar] [CrossRef]
- Liu, Z.; Cheng, S.; Liu, J.; Wu, Q.; Li, L.; Liang, H. A Novel Braking Control Strategy for Hybrid Electric Buses Based on Vehicle Mass and Road Slope Estimation. Chin. J. Mech. Eng. 2022, 35, 150. [Google Scholar] [CrossRef]
- Demir, A.; Öz, A. Evaluation of vehicle braking parameters by multiple regression method. Sci. Iran. 2019, 26, 3334–3355. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, M.; Cai, B.; Qu, Y.; Hu, J. One estimation method of road slope and vehicle distance. Measurement 2023, 208, 112481. [Google Scholar] [CrossRef]
- Yin, H.; Yi, W.; Wu, J.; Wang, K.; Guan, J. Adaptive Fuzzy Neural Network PID Algorithm for BLDCM Speed Control System. Mathematics 2022, 10, 118. [Google Scholar] [CrossRef]
- Premkumar, K.; Manikandan, B.V.; Kumar, C.A. Antlion Algorithm Optimized Fuzzy PID Supervised On-line Recurrent Fuzzy Neural Network Based Controller for Brushless DC Motor. Electr. Power Compon. Syst. 2017, 45, 2304–2317. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, R.; He, Q.; Liu, L. Variable Universe Fuzzy Control of High-Speed Elevator Horizontal Vibration Based on Firefly Algorithm and Backpropagation Fuzzy Neural Network. IEEE Access 2021, 9, 57020–57032. [Google Scholar] [CrossRef]
- Jia, C.; Kong, D.; Du, L. Recursive Terminal Sliding-Mode Control Method for Nonlinear System Based on Double Hidden Layer Fuzzy Emotional Recurrent Neural Network. IEEE Access 2022, 10, 118012–118023. [Google Scholar] [CrossRef]
- Ki, Y.H.; Lee, K.J.; Cheon, J.S.; Ahn, H.S. Design and implementation of a new clamping force estimator in Electro-Mechanical Brake systems. Int. J. Automot. Technol. 2013, 14, 739–745. [Google Scholar] [CrossRef]
- Chen, Q.; Lv, Z.; Tong, H.; Xiong, Z. Clamping Force Control Strategy of Electro-Mechanical Brake System Using VUF-PID Controller. Actuators 2023, 12, 272. [Google Scholar] [CrossRef]
- Hua, X.; Zeng, J.; Li, H.; Huang, J.; Luo, M.; Feng, X.; Xiong, H.; Wu, W. A Review of Automobile Brake-by-Wire Control Technology. Processes 2023, 11, 994. [Google Scholar] [CrossRef]
- Schrade, S.; Nowak, X.; Verhagen, A.; Schramm, D. Short Review of EMB Systems Related to Safety Concepts. Actuators 2022, 11, 214. [Google Scholar] [CrossRef]
- Li, D.; Tan, C.; Ge, W.; Cui, J.; Gu, C.; Chi, X. Review of Brake-by-Wire System and Control Technology. Actuators 2022, 11, 80. [Google Scholar] [CrossRef]
- Chen, Q.; Lv, Z.; Tong, H.; Zeng, D.; Ouyang, L.; Liu, Q. Study on multi-closed loop control of electro-mechanical braking for electric vehicles based on clamping force. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023. [Google Scholar] [CrossRef]
- Chen, Q.; Shao, H.; Liu, Y.; Xiao, Y.; Wang, N. Hydraulic-pressure-following control of an electronic hydraulic brake system based on a fuzzy proportional and integral controller. Eng. Appl. Comput. Fluid Mech. 2020, 4, 1228–1236. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Ma, C.; Jiang, Y. Fuzzy Neural Network PID-Based Constant Deceleration Control for Automated Mine Electric Vehicles Using EMB System. Sensors 2024, 24, 2129. https://doi.org/10.3390/s24072129
Li J, Ma C, Jiang Y. Fuzzy Neural Network PID-Based Constant Deceleration Control for Automated Mine Electric Vehicles Using EMB System. Sensors. 2024; 24(7):2129. https://doi.org/10.3390/s24072129
Chicago/Turabian StyleLi, Jian, Chi Ma, and Yuqiang Jiang. 2024. "Fuzzy Neural Network PID-Based Constant Deceleration Control for Automated Mine Electric Vehicles Using EMB System" Sensors 24, no. 7: 2129. https://doi.org/10.3390/s24072129
APA StyleLi, J., Ma, C., & Jiang, Y. (2024). Fuzzy Neural Network PID-Based Constant Deceleration Control for Automated Mine Electric Vehicles Using EMB System. Sensors, 24(7), 2129. https://doi.org/10.3390/s24072129