






Feedback Beamforming in the Time Domain


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Signal Model
3. Feedback Beamforming
4. Finding the Optimal Weights
5. Beamformer Evaluation
5.1. Channel Gain Estimation Error
5.2. Mainlobe and Sidelobe Attenuation
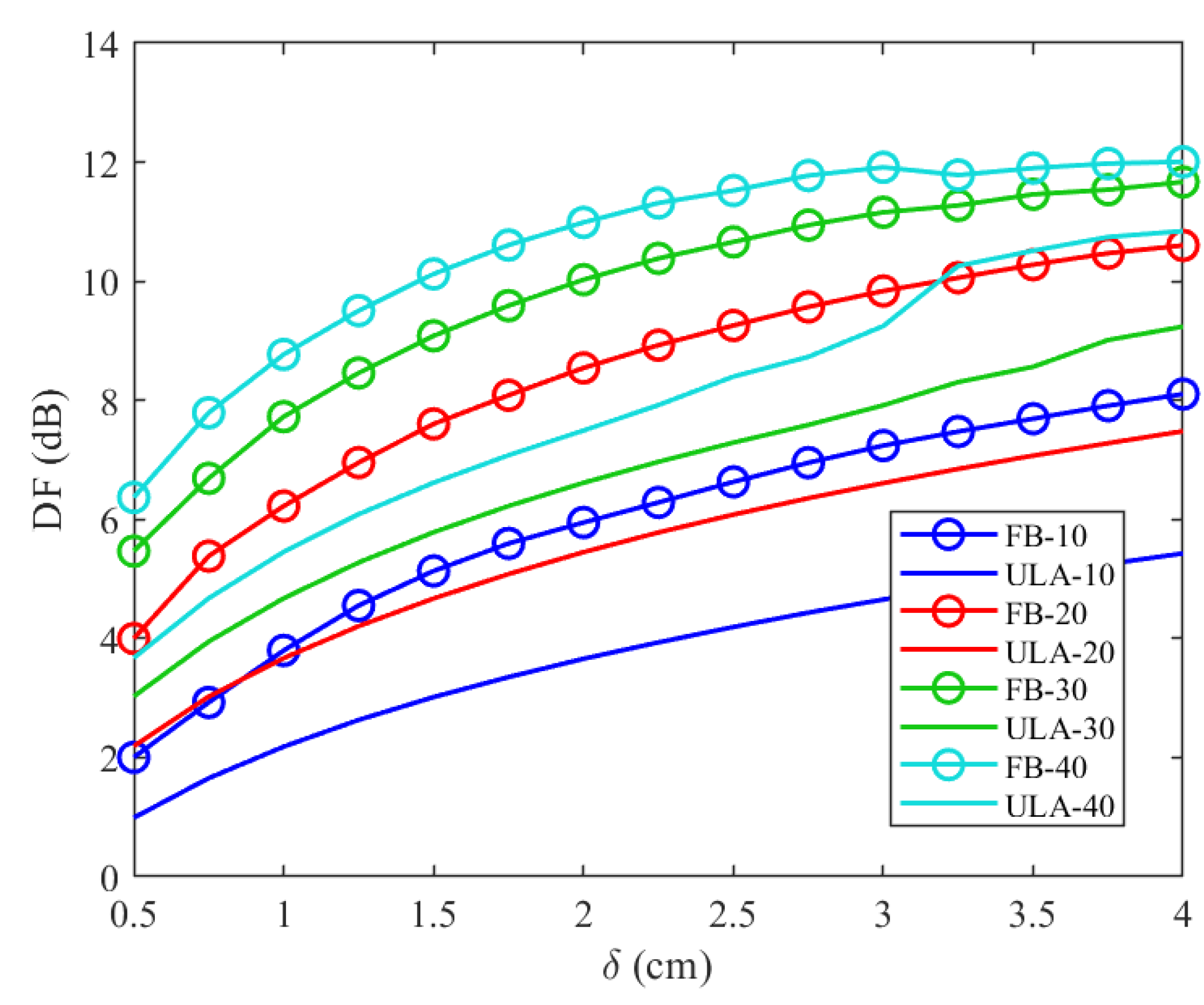
5.3. Directivity Factor
5.4. Range Error Influence
6. Time Domain vs. Frequency Domain Feedback Beamforming
6.1. Calculation Complexity
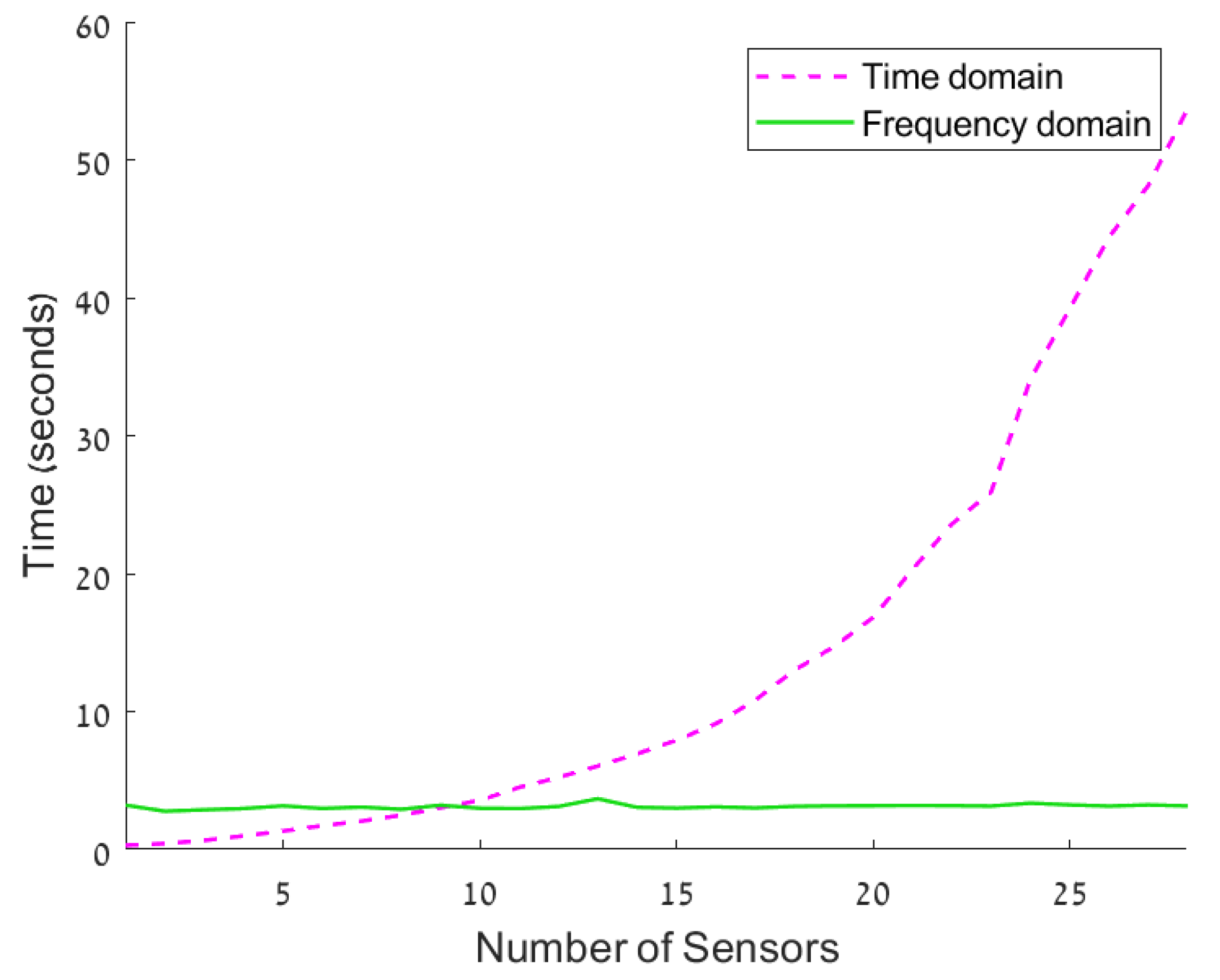
6.2. Execution Time
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CB | Conventional Beamformer |
| CRB | Cramér-Rao Bound |
| CW | Continuous Wave |
| DF | Directivity Factor |
| DOA | Direction of Arrival |
| DS | Delay-and-Sum |
| FB | Feedback Beamformer |
| FFT | Fast Fourier Transform |
| FIM | Fisher Information Matrix |
| IIR | Infinite Impulse Response |
| ULA | Uniform Linear Array |
| UWB | Ultra-Wideband |
| RIS | Reconfigurable Intelligent Surface |
| ML | Maximum-Likelihood |
Appendix A. FIM Calculation
References
- Geng, Z.; Deng, H.; Himed, B. Adaptive radar beamforming for interference mitigation in radar-wireless spectrum sharing. IEEE Signal Process. Lett. 2014, 22, 484–488. [Google Scholar] [CrossRef]
- Blomberg, A.E.A.; Austeng, A.; Hansen, R.E.; Synnes, S.A.V. Improving sonar performance in shallow water using adaptive beamforming. IEEE J. Ocean. Eng. 2013, 38, 297–307. [Google Scholar] [CrossRef]
- Allen, G.E.; Evans, B.L. Real-time sonar beamforming on workstations using process networks and POSIX threads. IEEE Trans. Signal Process. 2000, 48, 921–926. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Wang, J.B.; Huang, Y.; Zhu, W.P. Robust secure beamforming for 5G cellular networks coexisting with satellite networks. IEEE J. Sel. Areas Commun. 2018, 36, 932–945. [Google Scholar] [CrossRef]
- Phan, A.H.; Tuan, H.D.; Kha, H.H. Space-time beamforming for multiuser wireless relay networks. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 2836–2839. [Google Scholar]
- Paulraj, A.J.; Papadias, C.B. Space-time processing for wireless communications. IEEE Signal Process. Mag. 1997, 14, 49–83. [Google Scholar] [CrossRef]
- Lin, Z.; Niu, H.; An, K.; Wang, Y.; Zheng, G.; Chatzinotas, S.; Hu, Y. Refracting RIS-aided hybrid satellite-terrestrial relay networks: Joint beamforming design and optimization. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3717–3724. [Google Scholar] [CrossRef]
- An, K.; Lin, M.; Ouyang, J.; Zhu, W.P. Secure transmission in cognitive satellite terrestrial networks. IEEE J. Sel. Areas Commun. 2016, 34, 3025–3037. [Google Scholar] [CrossRef]
- Schuler, K.; Younis, M.; Lenz, R.; Wiesbeck, W. Array design for automotive digital beamforming radar system. In Proceedings of the IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; pp. 435–440. [Google Scholar]
- Harter, M.; Hildebrandt, J.; Ziroff, A.; Zwick, T. Self-calibration of a 3-D-digital beamforming radar system for automotive applications with installation behind automotive covers. IEEE Trans. Microw. Theory Tech. 2016, 64, 2994–3000. [Google Scholar] [CrossRef]
- Bond, E.J.; Li, X.; Hagness, S.C.; Van Veen, B.D. Microwave imaging via space-time beamforming for early detection of breast cancer. IEEE Trans. Antennas Propag. 2003, 51, 1690–1705. [Google Scholar] [CrossRef]
- Byrne, D.; Craddock, I.J. Time-domain wideband adaptive beamforming for radar breast imaging. IEEE Trans. Antennas Propag. 2015, 63, 1725–1735. [Google Scholar] [CrossRef]
- Lin, Z.; Niu, H.; An, K.; Hu, Y.; Li, D.; Wang, J.; Al-Dhahir, N. Pain without gain: Destructive beamforming from a malicious RIS perspective in IoT networks. IEEE Internet Things J. 2023, 11, 7619–7629. [Google Scholar] [CrossRef]
- Sun, Y.; An, K.; Zhu, Y.; Zheng, G.; Wong, K.K.; Chatzinotas, S.; Ng, D.W.K.; Guan, D. Energy-efficient hybrid beamforming for multilayer RIS-assisted secure integrated terrestrial-aerial networks. IEEE Trans. Commun. 2022, 70, 4189–4210. [Google Scholar] [CrossRef]
- Van Veen, B.D.; Buckley, K.M. Beamforming: A versatile approach to spatial filtering. IEEE ASSP Mag. 1988, 5, 4–24. [Google Scholar] [CrossRef] [PubMed]
- Chernyakova, T.; Eldar, Y.C. Fourier-domain beamforming: The path to compressed ultrasound imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 1252–1267. [Google Scholar] [CrossRef] [PubMed]
- Karo, I.Y.; Dvorkind, T.G.; Cohen, I. Source localization with feedback beamforming. IEEE Trans. Signal Process. 2020, 69, 631–640. [Google Scholar] [CrossRef]
- Dougherty, R. Advanced time-domain beamforming techniques. In Proceedings of the 10th AIAA/CEAS Aeroacoustics Conference, Manchester, UK, 10–12 May 2004; p. 2955. [Google Scholar]
- Buchris, Y.; Cohen, I.; Benesty, J. On the design of time-domain differential microphone arrays. Appl. Acoust. 2019, 148, 212–222. [Google Scholar] [CrossRef]
- Shubair, R.M.; Hakam, A. Adaptive beamforming using variable step-size LMS algorithm with novel ULA array configuration. In Proceedings of the 2013 15th IEEE International Conference on Communication Technology, Guilin, China, 17–19 November 2013; pp. 650–654. [Google Scholar]
- Ye, Z.; Dai, J.; Xu, X.; Wu, X. DOA estimation for uniform linear array with mutual coupling. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 280–288. [Google Scholar]
- Liao, B.; Chan, S.C. Adaptive beamforming for uniform linear arrays with unknown mutual coupling. IEEE Antennas Wirel. Propag. Lett. 2012, 11, 464–467. [Google Scholar] [CrossRef]
- Ioannides, P.; Balanis, C.A. Uniform circular and rectangular arrays for adaptive beamforming applications. IEEE Antennas Wirel. Propag. Lett. 2005, 4, 351–354. [Google Scholar] [CrossRef]
- Tsai, J.A.; Buehrer, R.M.; Woerner, B.D. BER performance of a uniform circular array versus a uniform linear array in a mobile radio environment. IEEE Trans. Wirel. Commun. 2004, 3, 695–700. [Google Scholar] [CrossRef]
- Ioannides, P.; Balanis, C.A. Uniform circular arrays for smart antennas. IEEE Antennas Propag. Mag. 2005, 47, 192–206. [Google Scholar] [CrossRef]
- Wu, X.; Yang, X.; Ma, S.; Zhou, B.; Yang, G. Hybrid channel estimation for UPA-assisted millimeter-wave massive MIMO IoT systems. IEEE Internet Things J. 2021, 9, 2829–2842. [Google Scholar] [CrossRef]
- Song, J.; Choi, J.; Love, D.J. Common codebook millimeter wave beam design: Designing beams for both sounding and communication with uniform planar arrays. IEEE Trans. Commun. 2017, 65, 1859–1872. [Google Scholar] [CrossRef]
- Shannon, C.E. Communication in the presence of noise. Proc. IRE 1949, 37, 10–21. [Google Scholar] [CrossRef]
- Benesty, J.; Cohen, I.; Chen, J. Fundamentals of Signal Enhancement and Array Signal Processing; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Chen, J.C.; Hudson, R.E.; Yao, K. Joint maximum-likelihood source localization and unknown sensor location estimation for near-field wideband signals. In Proceedings of the Advanced Signal Processing Algorithms, Architectures, and Implementations XI, San Diego, CA, USA, 1–3 August 2001; SPIE: Bellingham, WA, USA, 2001; Volume 4474, pp. 521–532. [Google Scholar]
- Zeira, A.; Nehorai, A. Frequency domain Cramer-Rao bound for Gaussian processes. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1063–1066. [Google Scholar] [CrossRef]
- Hum, S.V. Radio and Microwave Wireless Systems. Available online: https://www.waves.utoronto.ca/prof/svhum/ece422/notes/15-arrays2.pdf (accessed on 18 February 2024).
- Bao, C. Performance of time domain and time-frequency domain adaptive beamformers with moving sound sources. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings; Institute of Noise Control Engineering: Washington, DC, USA, 2014; Volume 249, pp. 3727–3734. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Herscovici, Z.A.; Cohen, I. Feedback Beamforming in the Time Domain. Sensors 2024, 24, 2179. https://doi.org/10.3390/s24072179
Herscovici ZA, Cohen I. Feedback Beamforming in the Time Domain. Sensors. 2024; 24(7):2179. https://doi.org/10.3390/s24072179
Chicago/Turabian StyleHerscovici, Zvi Aharon, and Israel Cohen. 2024. "Feedback Beamforming in the Time Domain" Sensors 24, no. 7: 2179. https://doi.org/10.3390/s24072179
APA StyleHerscovici, Z. A., & Cohen, I. (2024). Feedback Beamforming in the Time Domain. Sensors, 24(7), 2179. https://doi.org/10.3390/s24072179