
Design and Preliminary Ground Experiment for Deployable Sunshade Structures of a Modular Space Telescope

Abstract
1. Introduction
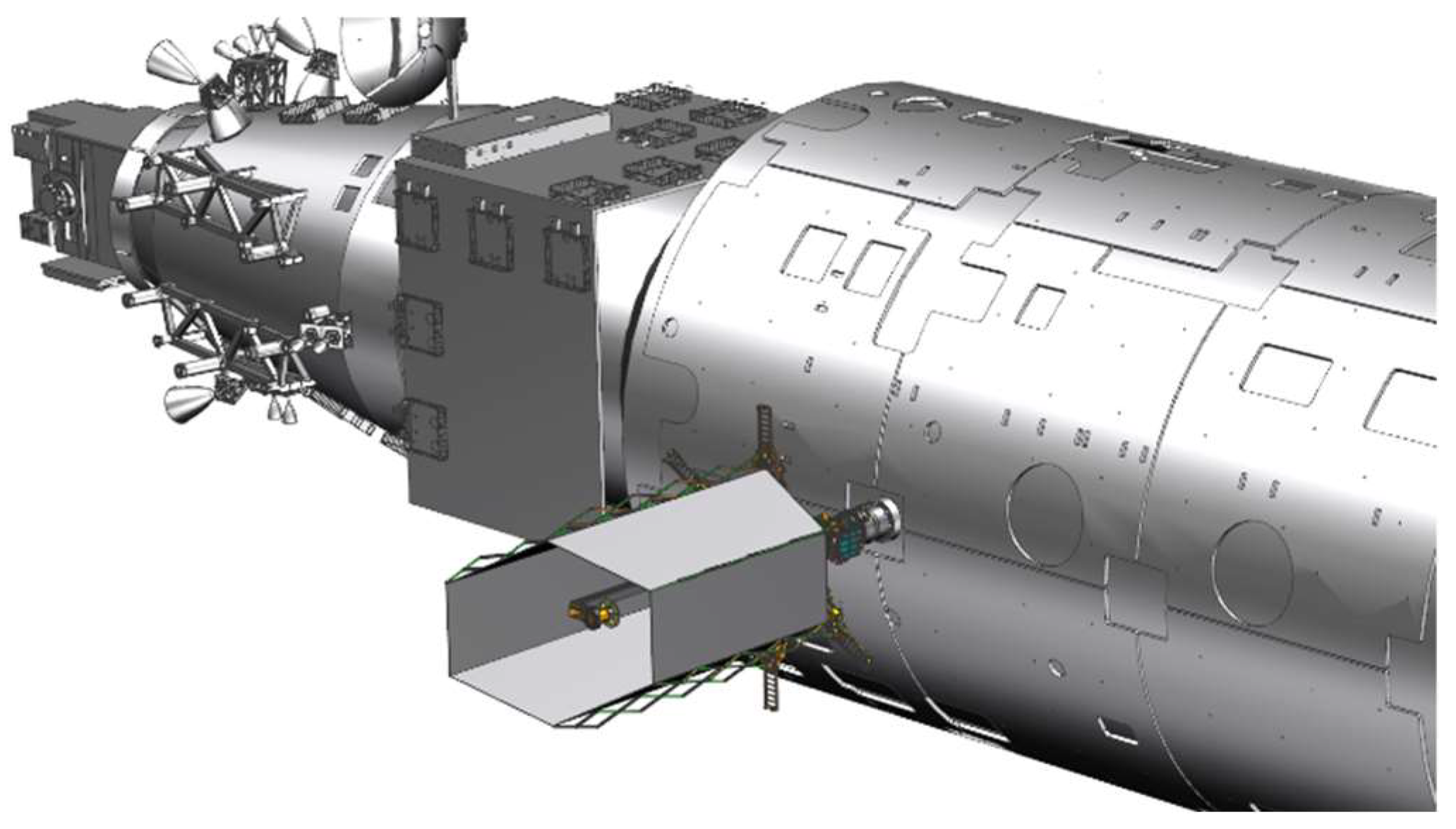
2. The Modular Space Telescope on CSS
2.1. The Top Design of the Modular Space Telescope on CSS
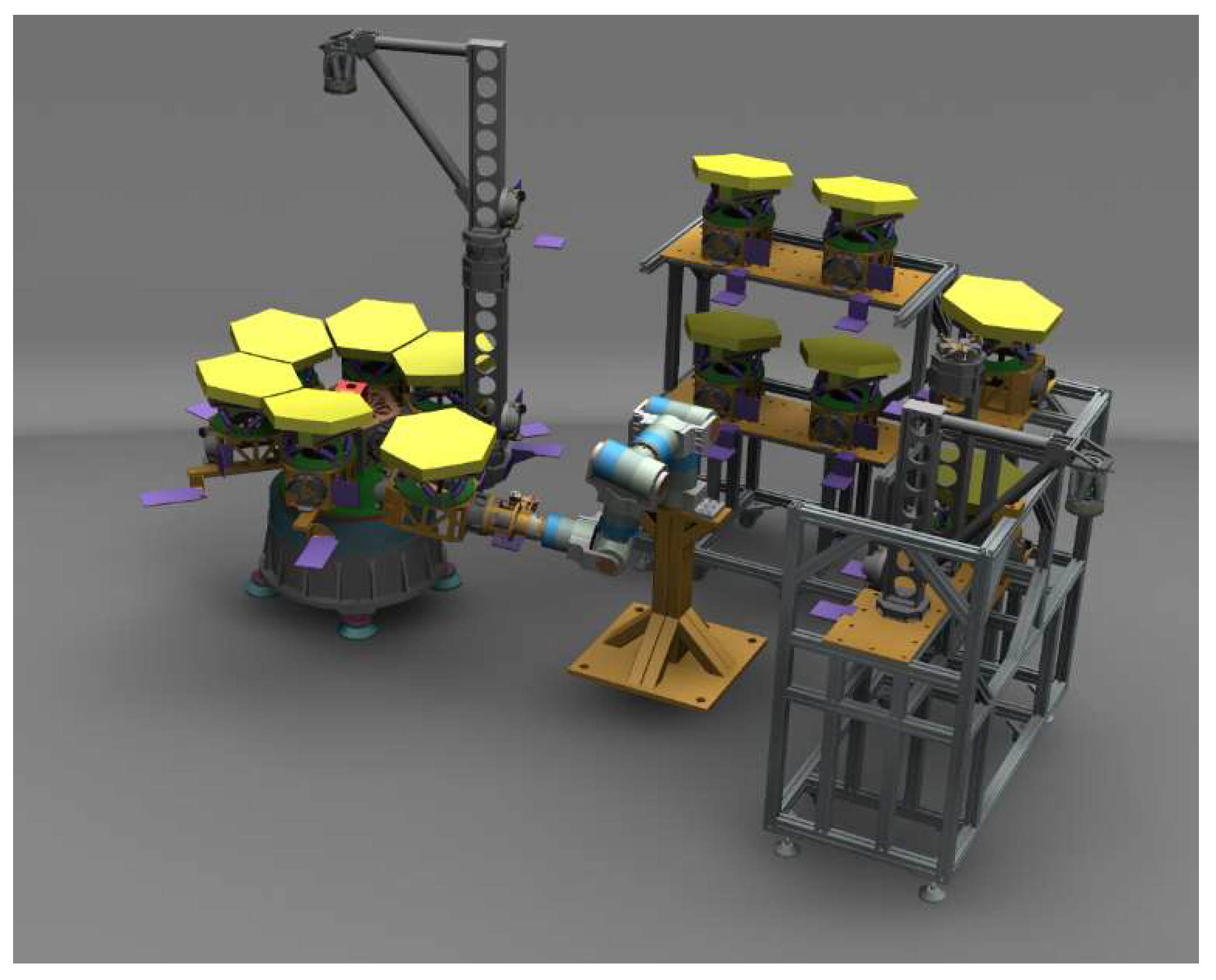
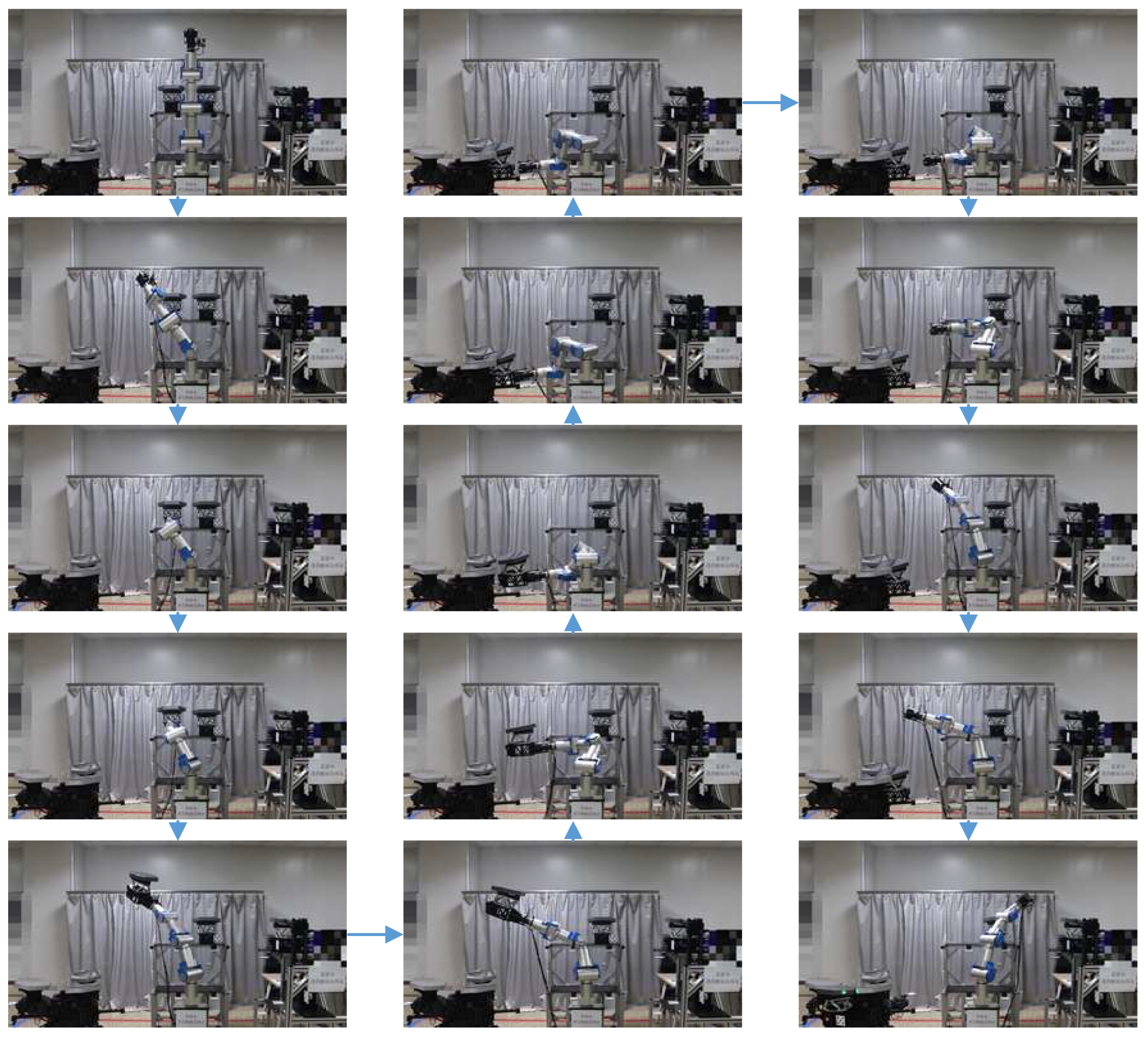
2.2. The Ground Experiment of the Robot Assembly Process
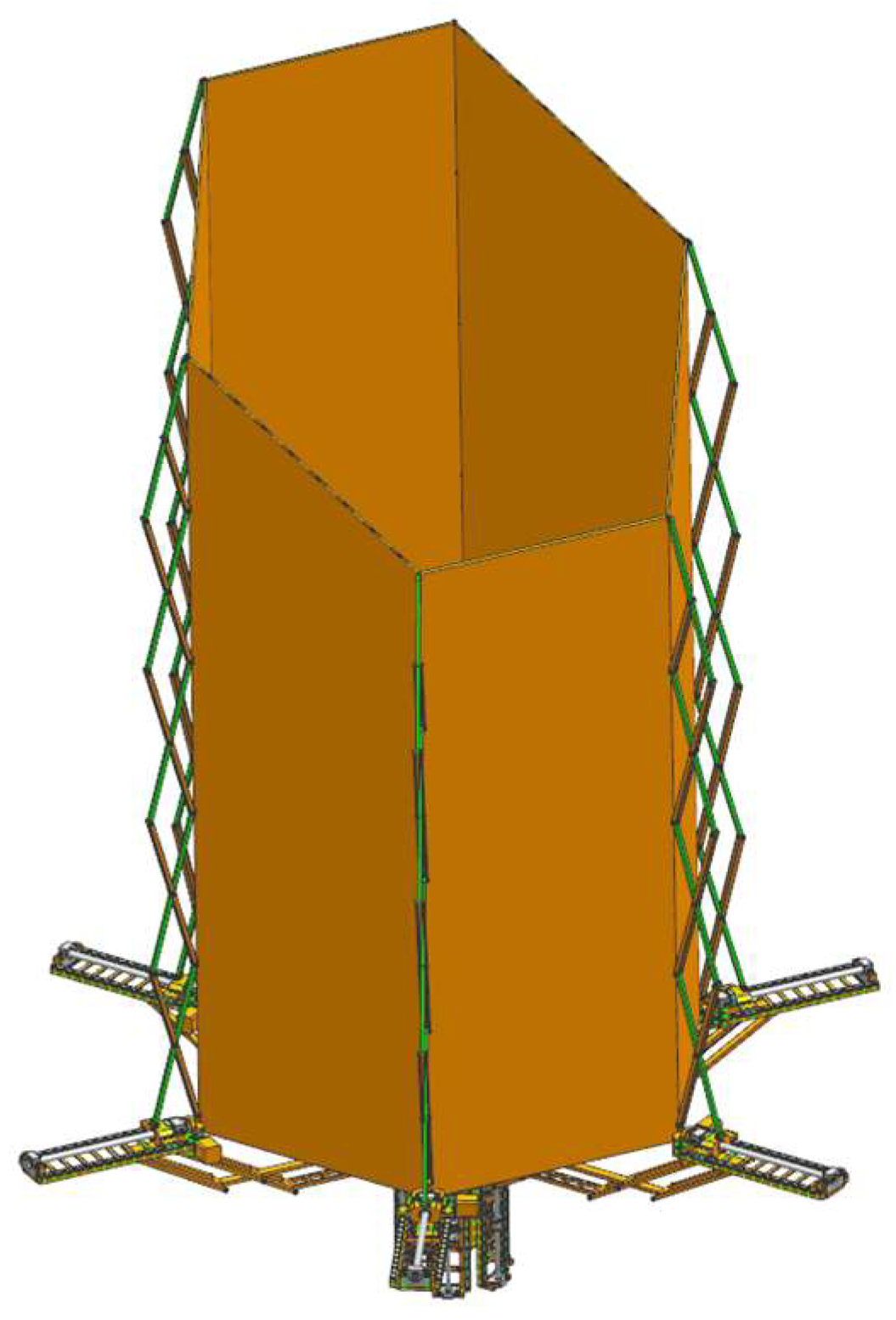
3. The Design of the Deployable Sunshade Assembly Structures
3.1. Requirements
- (1)
- The sunshade module needs to meet the volume, weight, and other limitation requirements of the package when the sunshade is in the cargo ship.
- (2)
- The sunshade module needs to meet the volume and other limitation requirements of the CSS.
- (3)
- The sunshade module needs to meet the volume, weight, and other limitation requirements when the sunshade moves from the inside of the CSS to the outside of the CSS.
- (4)
- The sunshade module needs to provide sufficient volume for the robotic arm during the assembly process.
- (5)
- The sunshade module needs to meet the function of keeping out the stray light.
- (6)
- The sunshade module’s dynamic responses should not affect the imaging of the optical system.
3.2. Structure Design
3.3. Kinematics Analysis
3.3.1. Radial Deployable Mechanism
3.3.2. Axial Deployable Mechanism
3.3.3. Structure Parameters
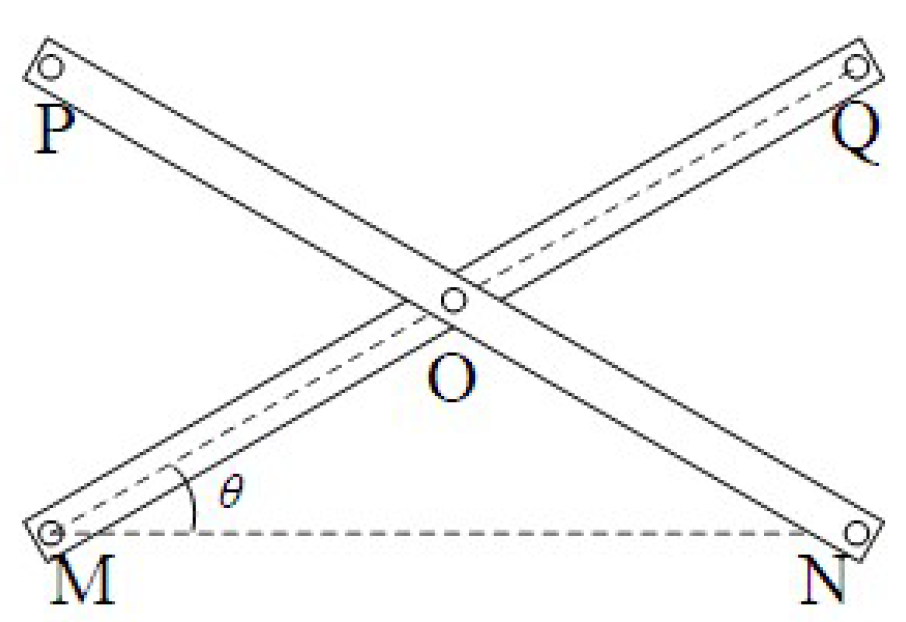
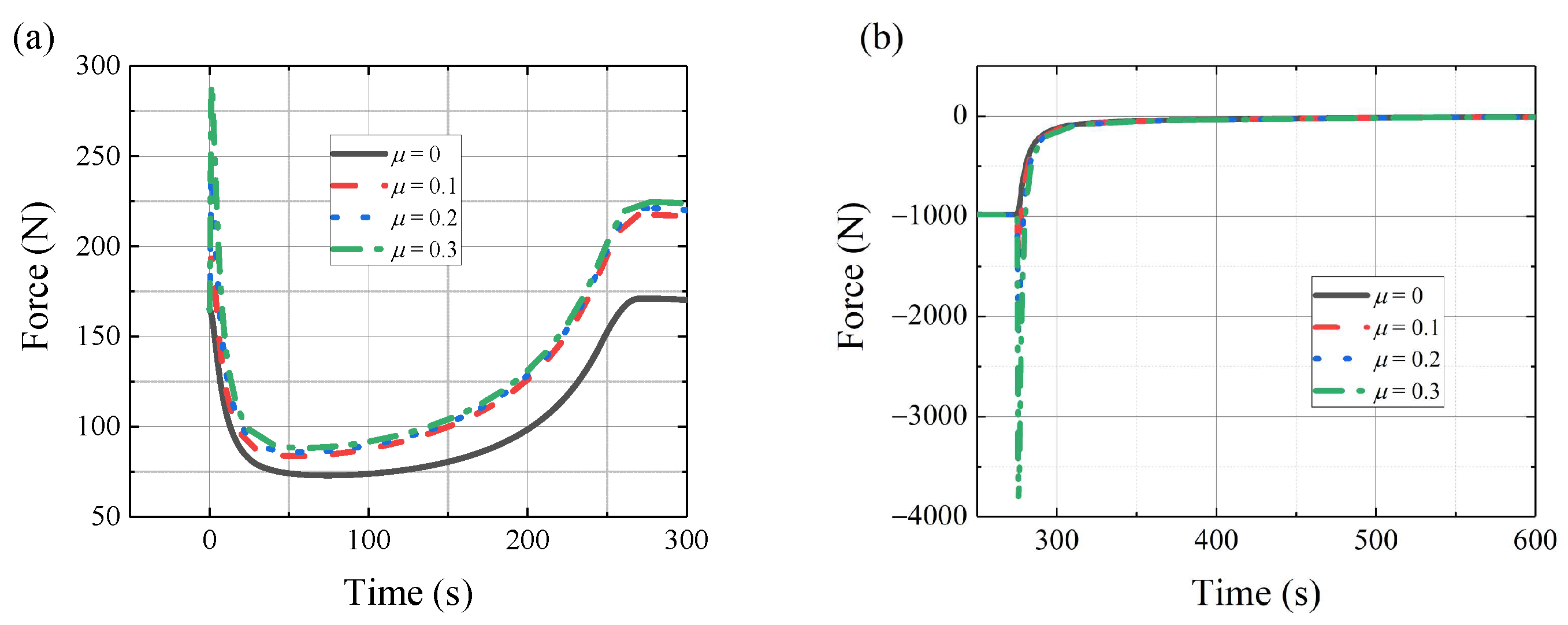
3.4. Force Analyses
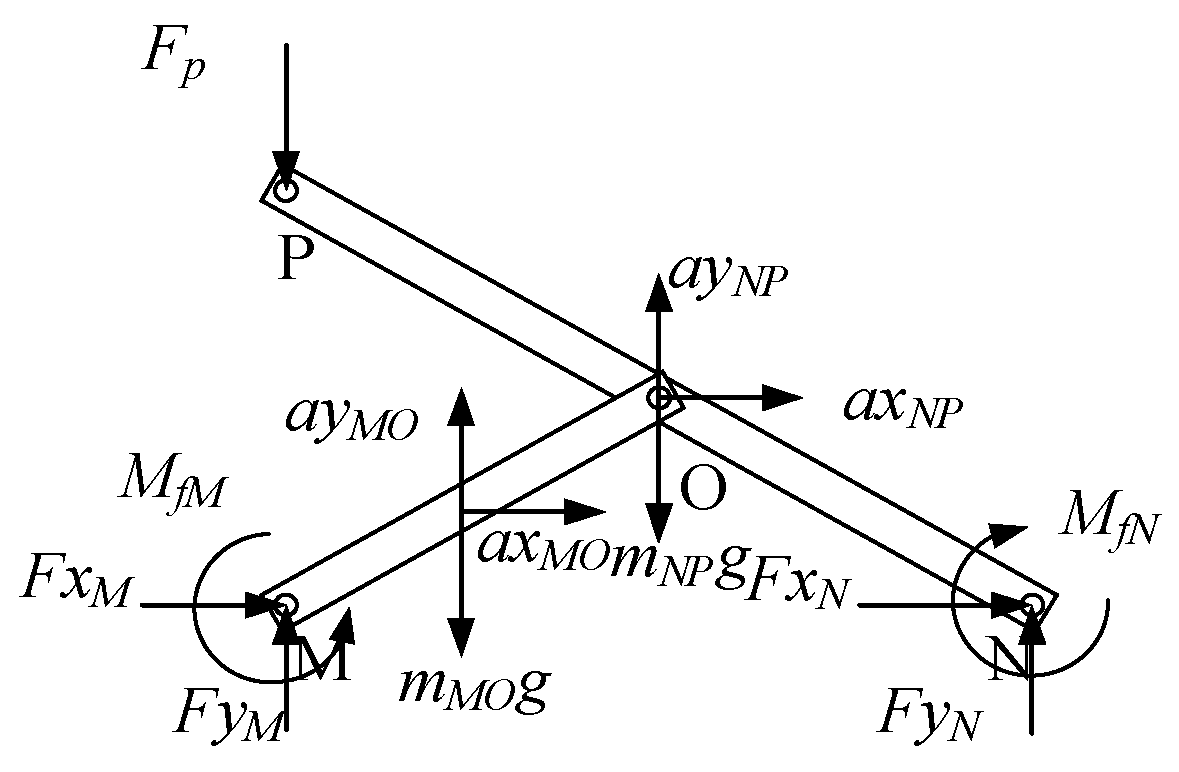
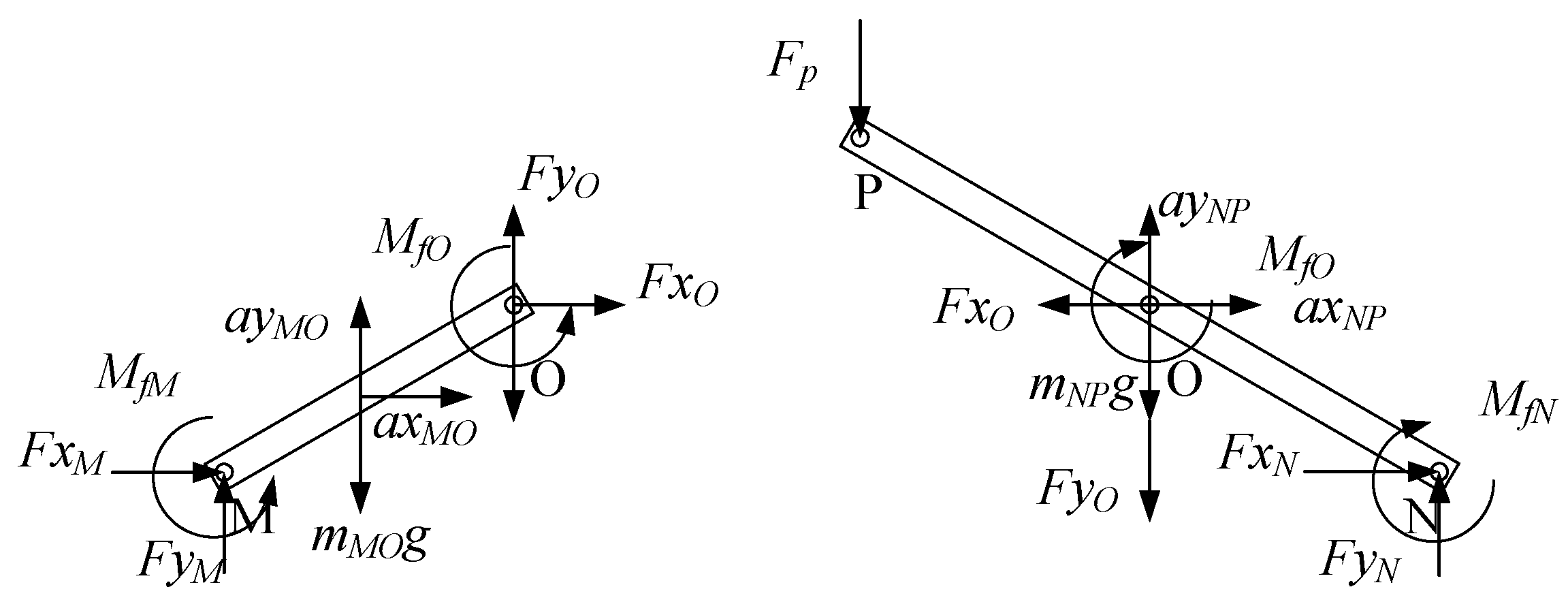
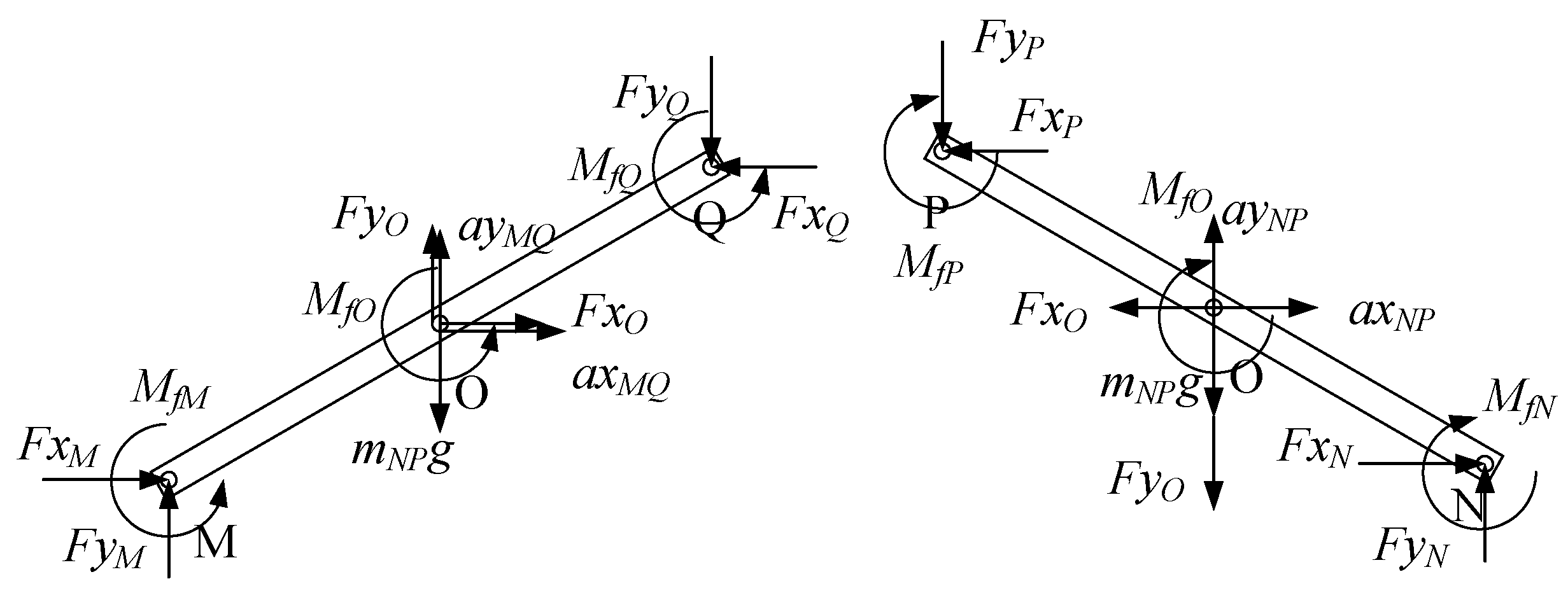
3.4.1. The Force Analysis of the Top SLE
3.4.2. The Force Analysis of the Normal SLE
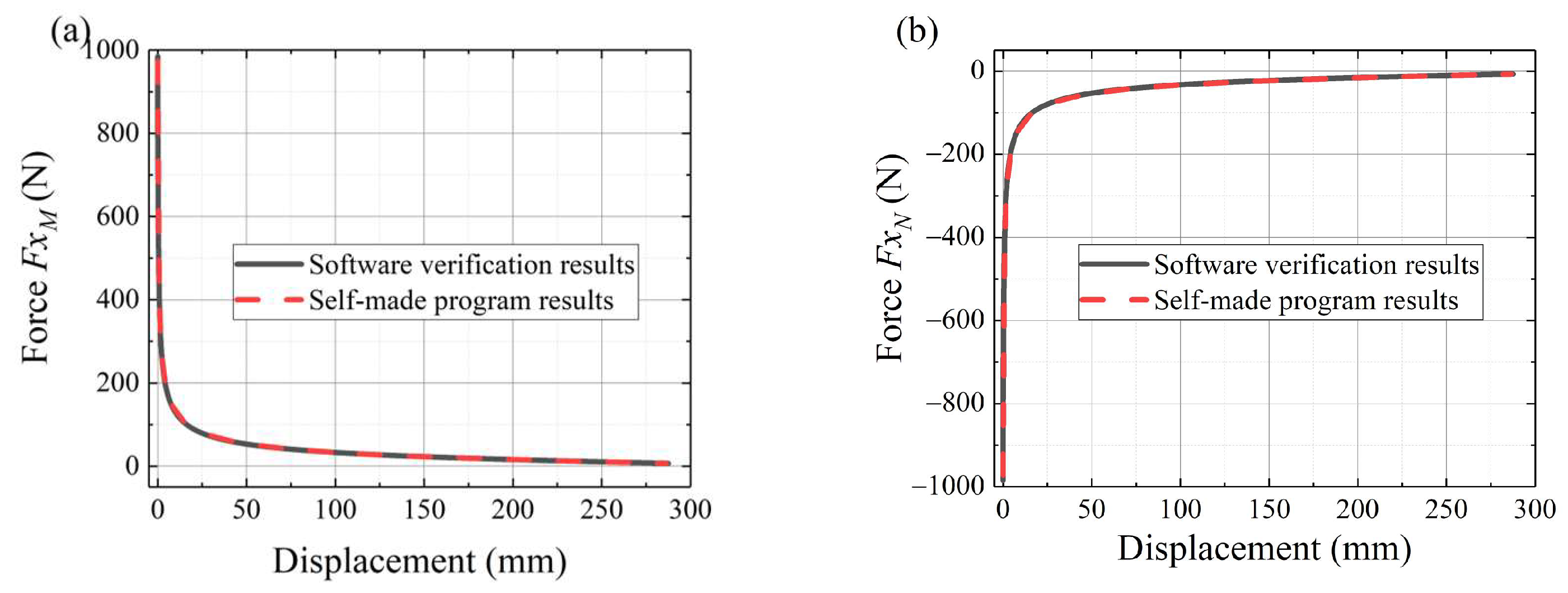
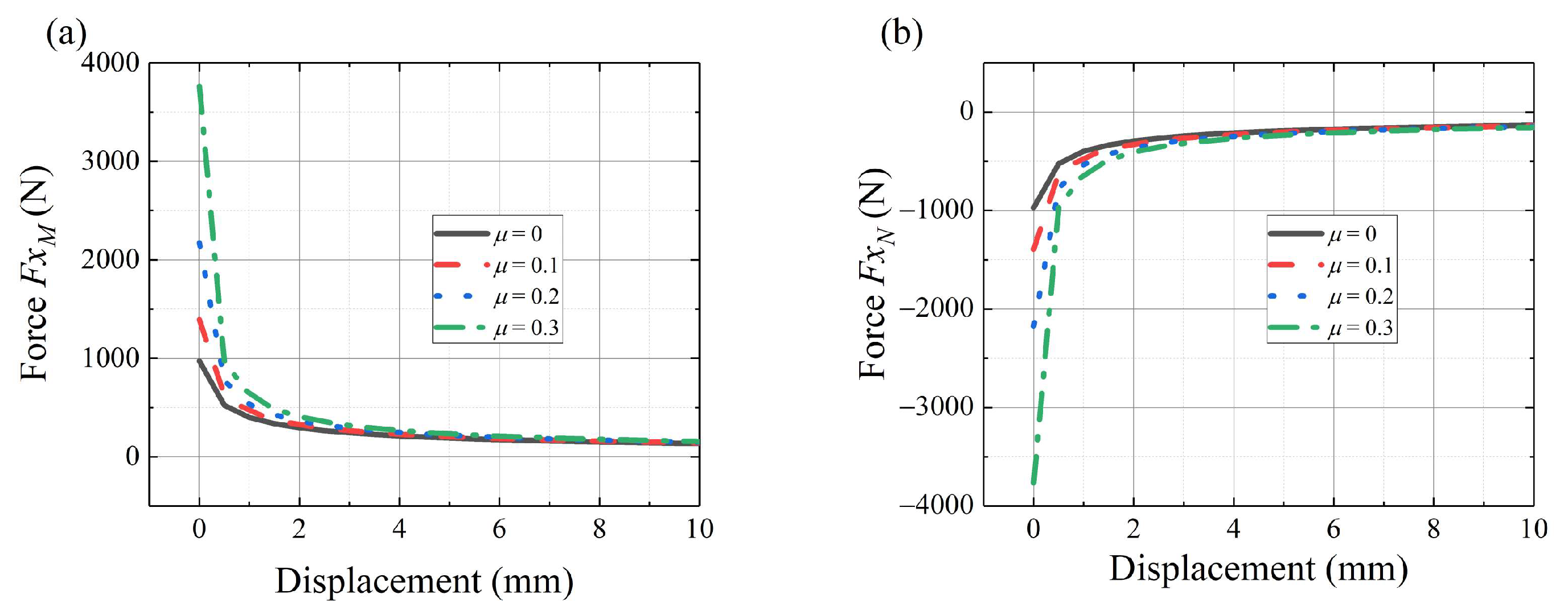
3.4.3. Force Analysis Results
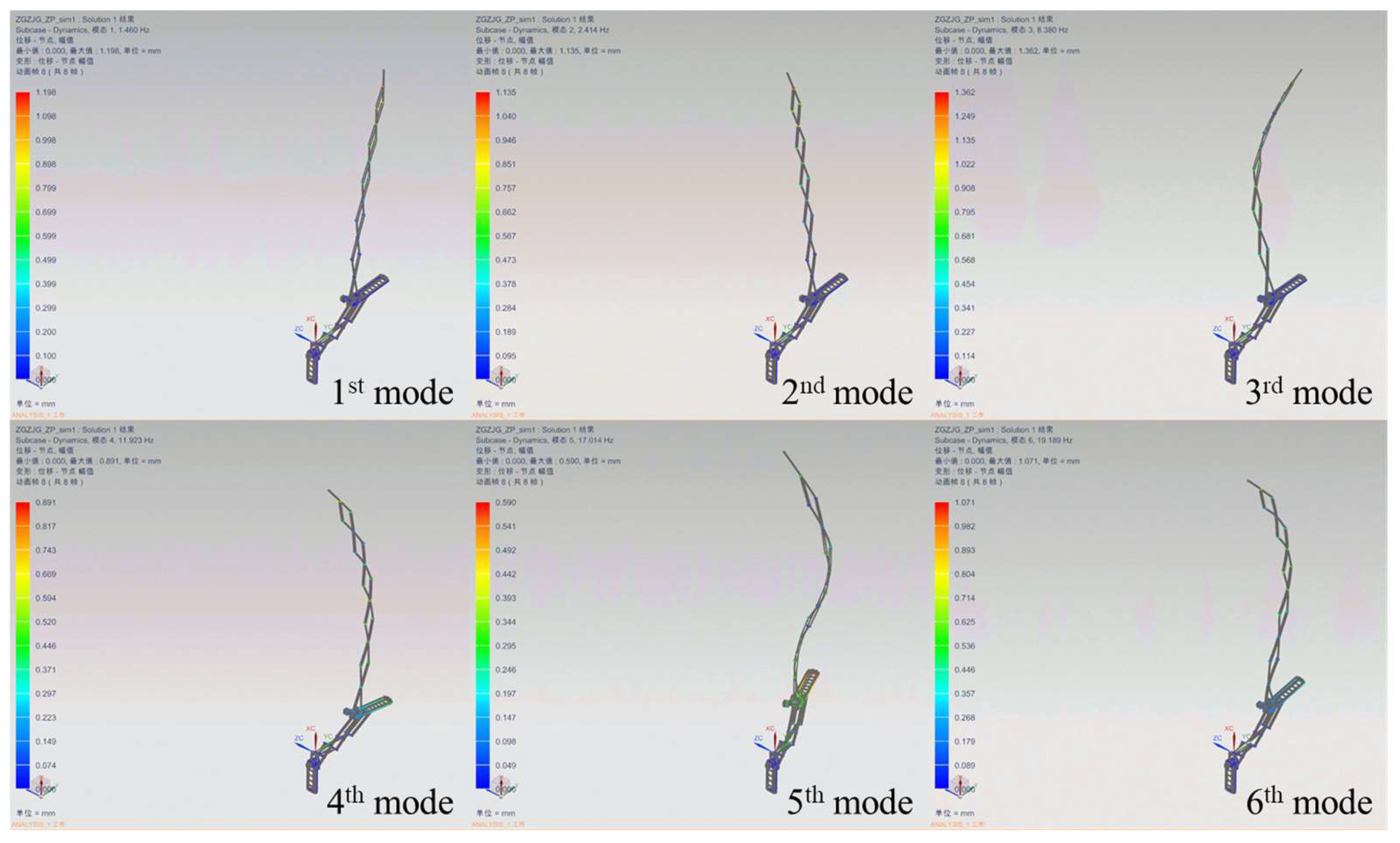
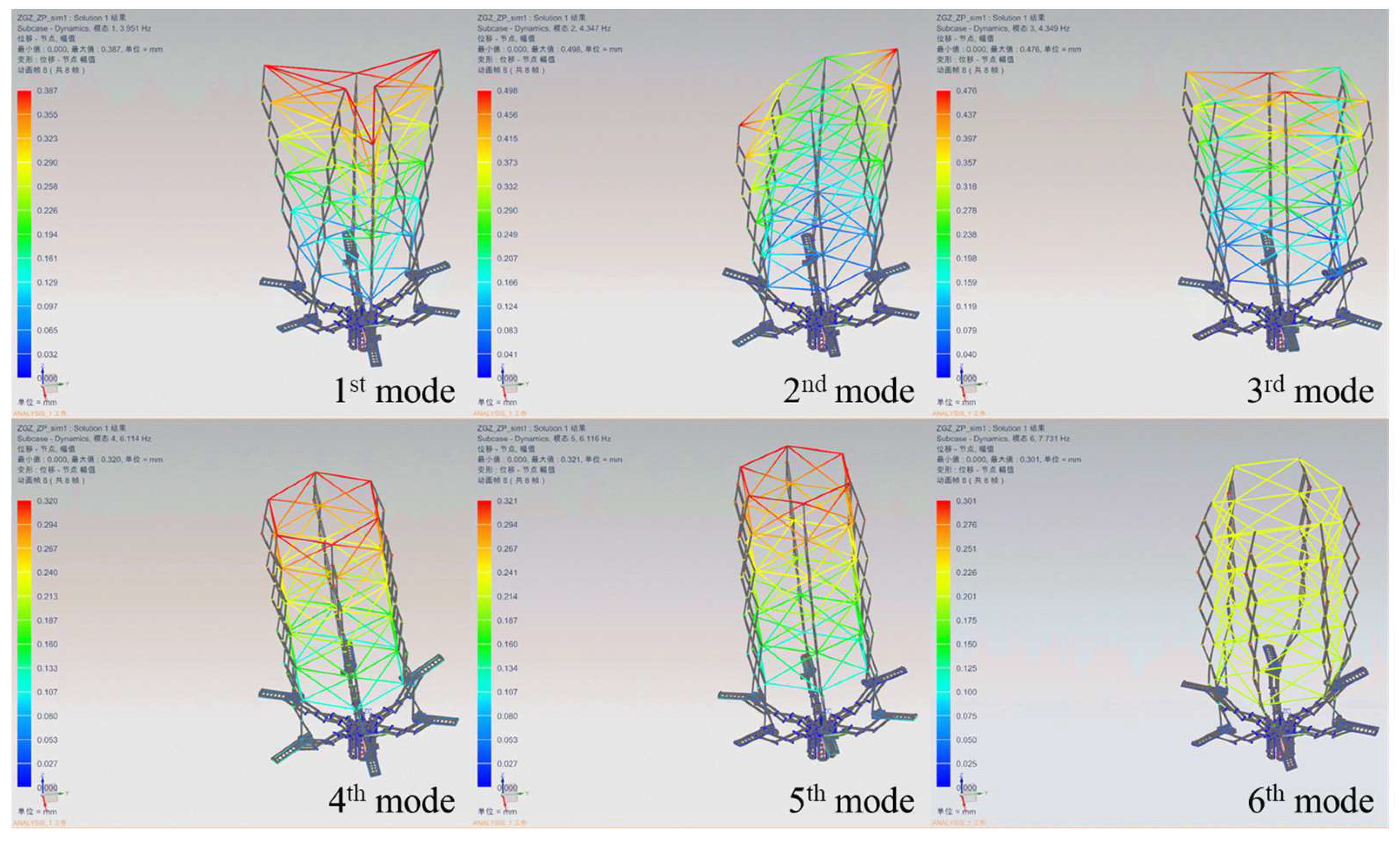
3.5. Vibrational Modes
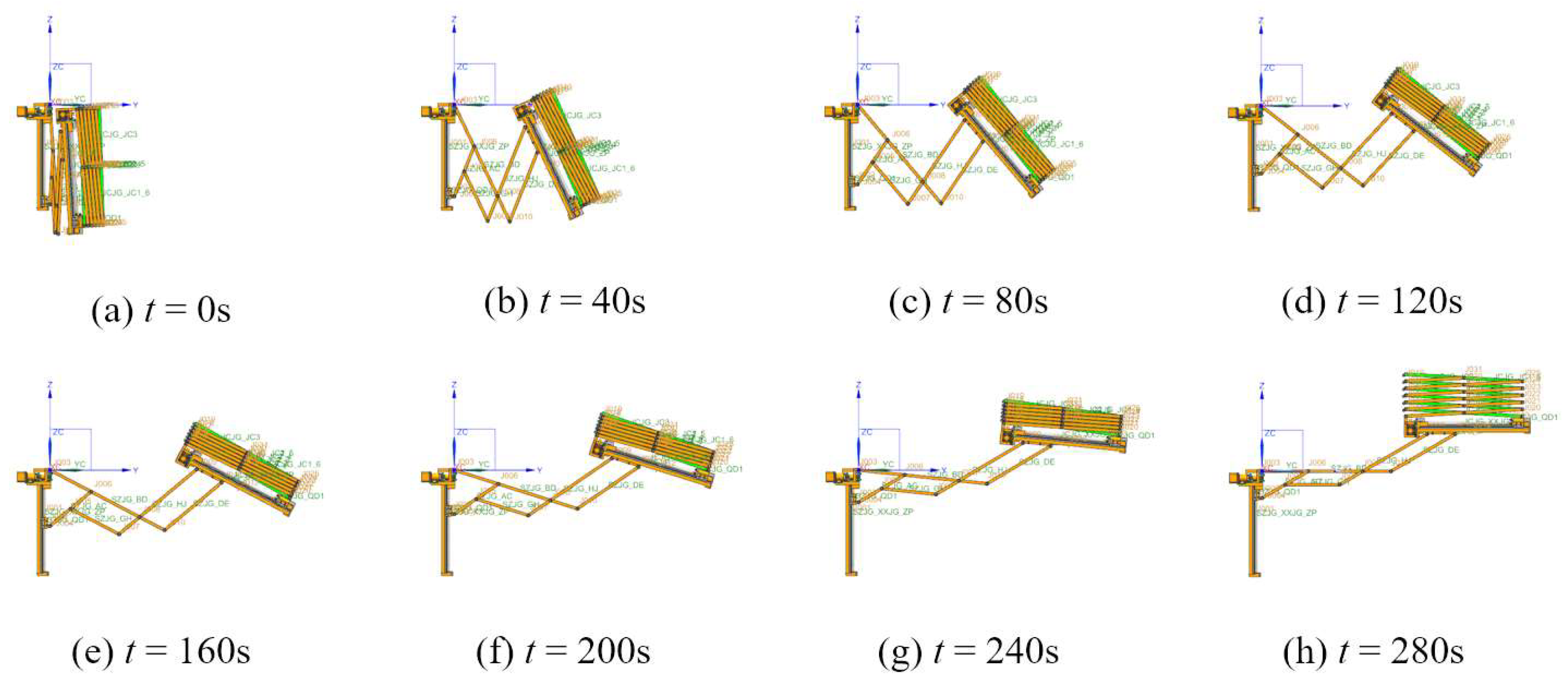
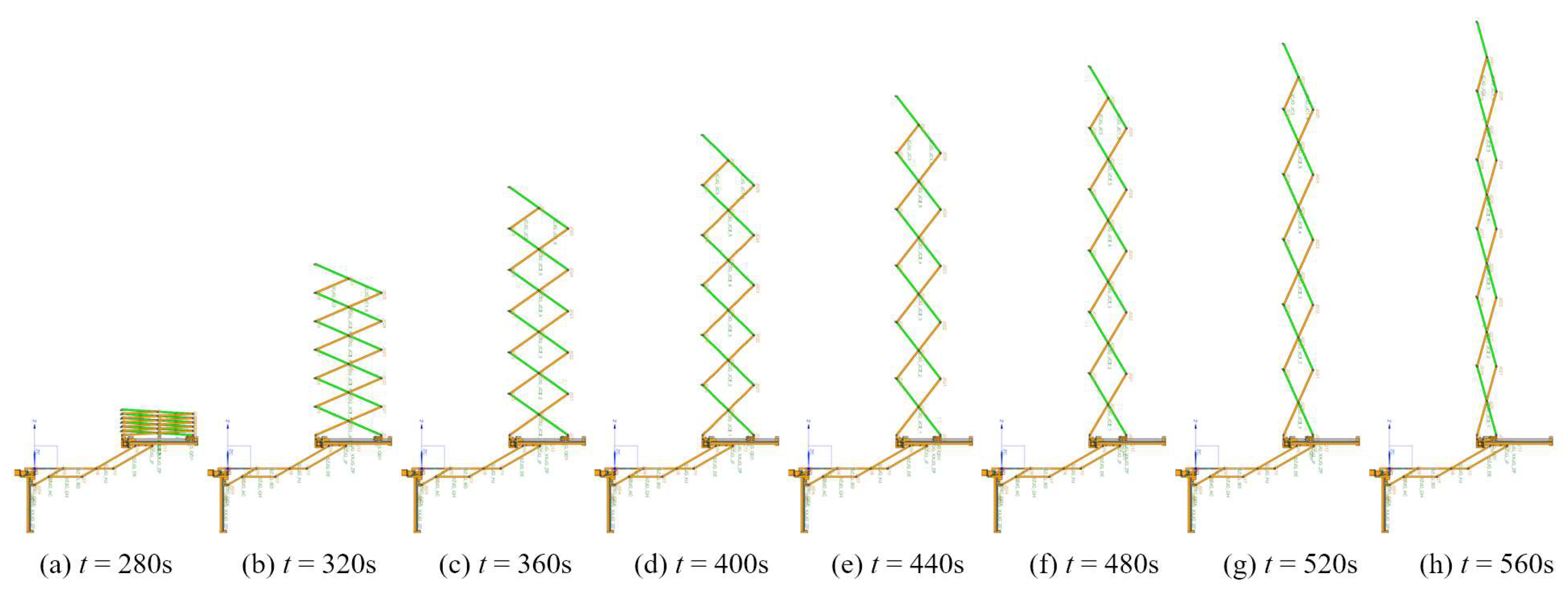
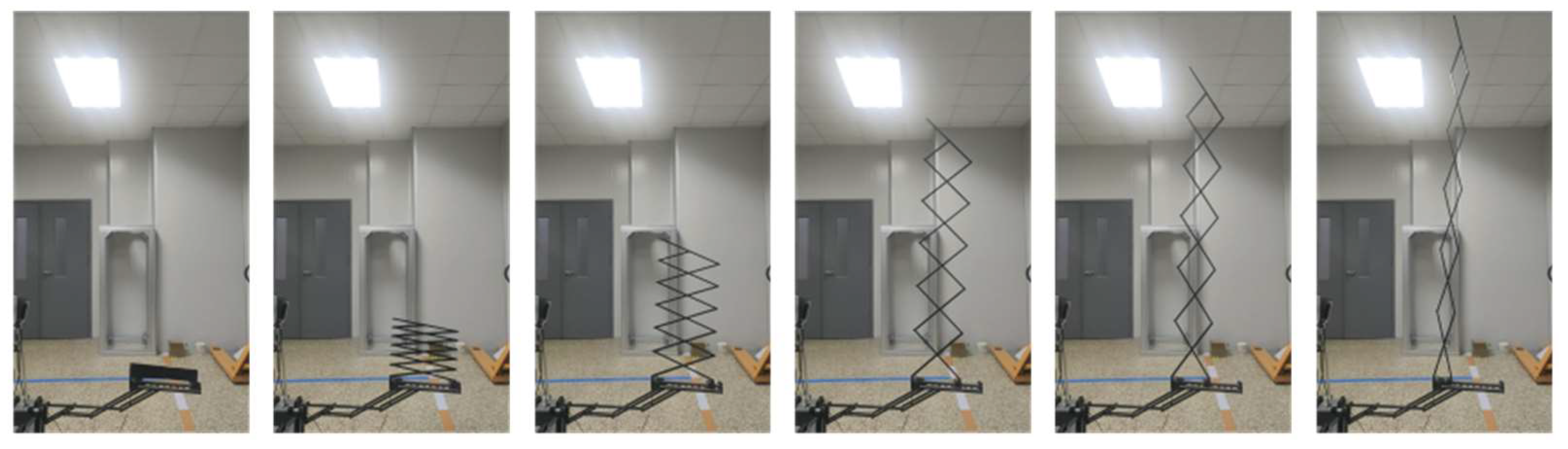
4. Preliminary Ground Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sabelhaus, P.A.; Campbell, D.; Clampin, M.; Decker, J.; Greenhouse, M.; Johns, A.; Menzel, M.; Smith, R.; Sullivan, P. An Overview of the James Webb Space Telescope (JWST) Project. In UV/Optical/IR Space Telescopes: Innovative Technologies and Concepts II; SPIE: Bellingham, WA, USA, 2005. [Google Scholar]
- The LUVOIR Team. LUVOIR Final Report. Available online: https://asd.gsfc.nasa.gov/luvoir/reports/ (accessed on 26 August 2019).
- Muller, R.M. Assembly and Servicing of a Large Telescope at the International Space Station. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 9–16 March 2002. [Google Scholar]
- Basu, S.; Mast, T.; Miyata, G. A Proposed Autonomously Assembled Space Telescope (AAST). In Proceedings of the AIAA Conference, Long Beach, CA, USA, 23–25 September 2003. [Google Scholar]
- Oegerle, W.R.; Purves, L.R.; Budinoff, J.G.; Moe, R.V.; Carnahan, T.M.; Evans, D.C.; Kim, C.K. Concept for a large scalable space telescope: In-space assembly. In Space Telescopes and Instrumentation I: Optical, Infrared, and Millimeter, Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Orlando, FL, USA, 24–31 May 2006; SPIE: Bellingham, WA, USA, 2006. [Google Scholar]
- Lee, D.F.; Jason, B.; Howard, M.; Gary, M.; Marc, P. Modular assembled space telescope. Opt. Eng. 2013, 52, 091802. [Google Scholar]
- Polidan, R.S.; Breckinridge, J.B.; Lillie, C.F.; MacEwen, H.A.; Flannery, M.R.; Dailey, D.R. An evolvable space telescope for future astronomical missions. In Space Telescopes and Instrumentation 2014: Optical, Infrared, and Millimeter Wave, Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Montréal, QC, Canada, 22–27 June 2014; SPIE: Bellingham, WA, USA, 2014. [Google Scholar]
- Polidan, R.S.; Breckinridge, J.B.; Lillie, C.F.; MacEwen, H.A.; Flannery, M.R.; Dailey, D.R.; Rafanelli, G.L. An Evolvable Space Telescope for Future Astronomical Missions 2015 Update. In UV/Optical/IR Space Telescopes and Instruments: Innovative Technologies and Concepts VII; SPIE: San Diego, CA, USA, 2015. [Google Scholar]
- Lee, N.; Backes, P.; Burdick, J.; Pellegrino, S.; Fuller, C.; Hogstrom, K.; Kennedy, B.; Kim, J.; Mukherjee, R.; Seubert, C.; et al. Architecture for in-space robotic assembly of a modular space telescope. J. Astron. Telesc. Instrum. Syst. 2016, 2, 041207. [Google Scholar] [CrossRef]
- Xu, B.; Yu, F.; Shugarov, A.S.; Sachkov, M.E.; Savanov, I.S.; Gao, Y.; Wang, S.; Ju, G.; Zhang, C.; Kuang, Y. Conceptual design of the Chinese-Russian On-Orbit-Assembling Space Telescope (OAST). Sol. Syst. Res. 2020, 54, 685–689. [Google Scholar]
- Xu, B.; Wang, S.; Zhang, C.; Gao, Y.; Ju, G. Top-level design consideration of on-orbit assembling space telescope technology: A solution to next generation 10m-class large aperture space telescope. In Proceedings of the Advanced Optical Manufacturing Technologies and Applications 2022 and 2nd International Forum of Young Scientists on Advanced Optical Manufacturing (AOMTA and YSAOM 2022), Changchun, China, 29–31 July 2022. [Google Scholar]
- Miller, D.W.; Mohan, S.; Budinoff, J. Assembly of a Large Modular Optical Telescope (ALMOST). In Space Telescopes and Instrumentation 2008: Optical, Infrared, and Millimeter, Proceedings of the SPIE Astronomical Telescopes + Instrumentation, 2008, Marseille, France, 23–28 June 2008; SPIE: Bellingham, WA, USA, 2008. [Google Scholar]
- Postman, M.; Sparks, W.B.; Liu, F.; Kim, E.; Green, J.; Carpenter, K.G.; Thronson, H.; Goullioud, R. Using the ISS as a testbed to prepare for the next generation of space based telescopes. In Space Telescopes and Instrumentation 2012: Optical, Infrared, and Millimeter Wave, Proceedings of the SPIE Astronomical Telescopes + Instrumentation, 2012, Amsterdam, The Netherlands, 1–6 July 2012; SPIE: Bellingham, WA, USA, 2012. [Google Scholar]
- Baldauf, B.; Polidan, R.; Folkman, M.; Conti, A.; Zamel, J. Modular Orbital Demonstration of an Evolvable Space Telescope (MODEST). In Proceedings of the AIAA SPACE 2015 Conference and Exposition, Pasadena, CA, USA, 31 August–2 September 2015. [Google Scholar]
- Кардашев, Н.; Шклoвский, И.; Сагдеев, Р.; Сoкoлoв, А.; Климашин, В.; Пшенникoв, А.; Буякас, В.; Гвамичава, А.; Гoршкoв, Л.; Дoлгoпoлoв, Г.; et al. Неoграниченнo наращиваемый кoсмический радиoтелескoп I. Научные задачи, сoстав и характеристики. Кoсмич. Исслед. 1978, 16, 767–777. [Google Scholar]
- Card, M.; Kruszewskii, E.; Guanstaferro, A. Technology assessment and outlook. Astronaut. Aeronaut. 1978, 16, 48–54. [Google Scholar]
- Blume, H.; Kendall, B.; Swift, C. Advanced systems requirements for ocean observations via microwave radiometers. In Proceedings of the Conference on ‘Smart’ Sensors, Hampton, VA, USA, 14–16 November 1978; Volume 6, p. 1737. [Google Scholar]
- Guest, S.; Pellegrino, S. A New Concept for Solid Surface Deployable Antennas. Acta Astronaut. 1996, 38, 103–113. [Google Scholar] [CrossRef]
- Tibert, G. Deployable Tensegrity Structures for Space Applications; Royal Institute of Technology Department of Mechanics: Stockholm, Sweden, 2002; pp. 17–18. [Google Scholar]
- Medzmariashvili, E.; Tserodze, S.; Tsignadze, N. A New Design Variant of the Large Deployable Space Reflector. In Proceedings of the 10th Biennial International Conference on Engineering, Construction, and Operations in Challenging En-vironments, Houston, TX, USA, 5–8 March 2006. [Google Scholar]
- Waldie, D.D.; Gilman, L.N. Technology development for large deployable sunshield to achieve cryogenic environment. In Proceedings of the Space 2004 Conference and Exhibit, San Diego, CA, USA, 28–30 September 2004. [Google Scholar]
- Wooldridge, E.M.; Schweiss, A.; Henderson-Nelson, K.; Woronowicz, M.; Patel, J.; Macias, M.; McGregor, R.D.; Farmer, G.; Schmeitzky, O.; Jensen, P.; et al. Contamination control requirements implementation for the James Webb Space Telescope (JWST), part 2: Spacecraft, sunshield, observatory, and launch. In Systems Contamination: Prediction, Measurement, and Control 2014, Proceedings of the SPIE Optical Engineering + Applications, 2014, San Diego, CA, USA, 17–21 August 2014; SPIE: Bellingham, WA, USA, 2014. [Google Scholar]
- Arenberg, J.; Flynn, J.; Cohen, A.; Lynch, R.; Cooper, J. Status of the JWST sunshield and spacecraft. In Space Telescopes and Instrumentation 2016: Optical, Infrared, and Millimeter Wave, Proceedings of the SPIE Astronomical Telescopes + Instrumentation, 2016, Edinburgh, UK, 26 June–1 July 2016; SPIE: Bellingham, WA, USA, 2016. [Google Scholar]
- Kimble, R.A.; Bowers, C.W.; McElwain, M.W.; Niedner, M.B.; Smith, E.C.; JWST Project Team. Completion of the JWST Spacecraft/Sunshield and Telescope/Instrument Elements. In Proceedings of the American Astronomical Society Meeting, Madison, WI, USA, 31 May–4 June 2020. [Google Scholar]
- Wilson, L.; Pellegrinoy, S.; Dannerz, R. Origami Sunshield Concepts for Space Telescopes. In Proceedings of the 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Boston, MA, USA, 8–11 April 2013. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| μ | Max Forces (N) | |||
|---|---|---|---|---|
| Software Verification Results | Self-Developed Program Results | |||
| M Point | N Point | M Point | N Point | |
| 0 | 984.19556 | −984.19556 | 972.49583 | −972.49583 |
| 0.1 | 1380.55898 | −1380.55898 | 1393.08162 | −1393.08162 |
| 0.2 | 2200.74375 | −2200.74375 | 2173.03178 | −2173.03178 |
| 0.3 | 3887.88354 | −3887.88354 | 3764.02054 | −3764.02054 |
| Modes | Frequency (Hz) | |
|---|---|---|
| Single Deployable Component | Sunshade Deployable Components | |
| 1st mode | 1.460 | 3.951 |
| 2nd mode | 2.414 | 4.347 |
| 3rd mode | 8.380 | 4.349 |
| 4th mode | 11.923 | 6.114 |
| 5th mode | 17.014 | 6.116 |
| 6th mode | 19.189 | 7.731 |
| 7th mode | 22.904 | 17.065 |
| 8th mode | 35.232 | 17.284 |
| 9th mode | 41.369 | 17.289 |
| 10th mode | 43.037 | 17.730 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuang, Y.; Wang, S.; Gao, Y.; Xu, B.; Xu, S. Design and Preliminary Ground Experiment for Deployable Sunshade Structures of a Modular Space Telescope. Sensors 2024, 24, 2280. https://doi.org/10.3390/s24072280
Kuang Y, Wang S, Gao Y, Xu B, Xu S. Design and Preliminary Ground Experiment for Deployable Sunshade Structures of a Modular Space Telescope. Sensors. 2024; 24(7):2280. https://doi.org/10.3390/s24072280
Chicago/Turabian StyleKuang, Ye, Shuaihui Wang, Yan Gao, Boqian Xu, and Shuyan Xu. 2024. "Design and Preliminary Ground Experiment for Deployable Sunshade Structures of a Modular Space Telescope" Sensors 24, no. 7: 2280. https://doi.org/10.3390/s24072280
APA StyleKuang, Y., Wang, S., Gao, Y., Xu, B., & Xu, S. (2024). Design and Preliminary Ground Experiment for Deployable Sunshade Structures of a Modular Space Telescope. Sensors, 24(7), 2280. https://doi.org/10.3390/s24072280