
SALOS—A UWB Single-Anchor Indoor Localization System Based on a Statistical Multipath Propagation Model

Abstract
:1. Introduction
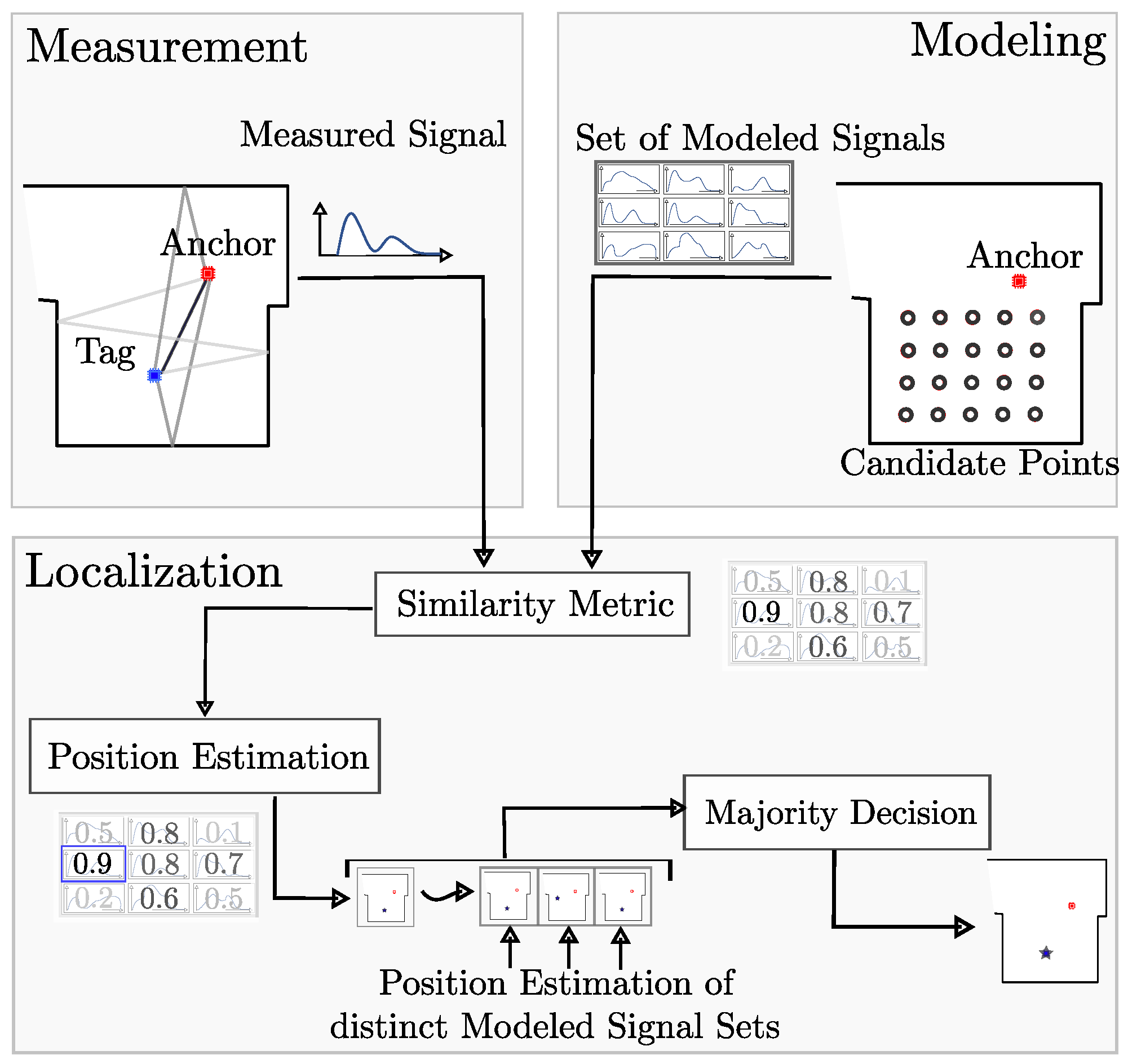
- We introduce our redesigned novel UWB single-anchor localization system, called SALOS, which works in massive multipath environments.
- For this, we present a three-dimensional multipath propagation model for arbitrary spatial geometries to construct receive signals with statistic variation in amplitude and phase.
- With these distinct modeled signals, we employ a straightforward algorithm and similarity metric to estimate the tag’s position.
- We evaluate the position accuracy of localization for a real indoor environment and publish the measurements and modeled datasets for free download.
2. Related Work
3. Construction of Receive Signals with a Three-Dimensional Multipath Model
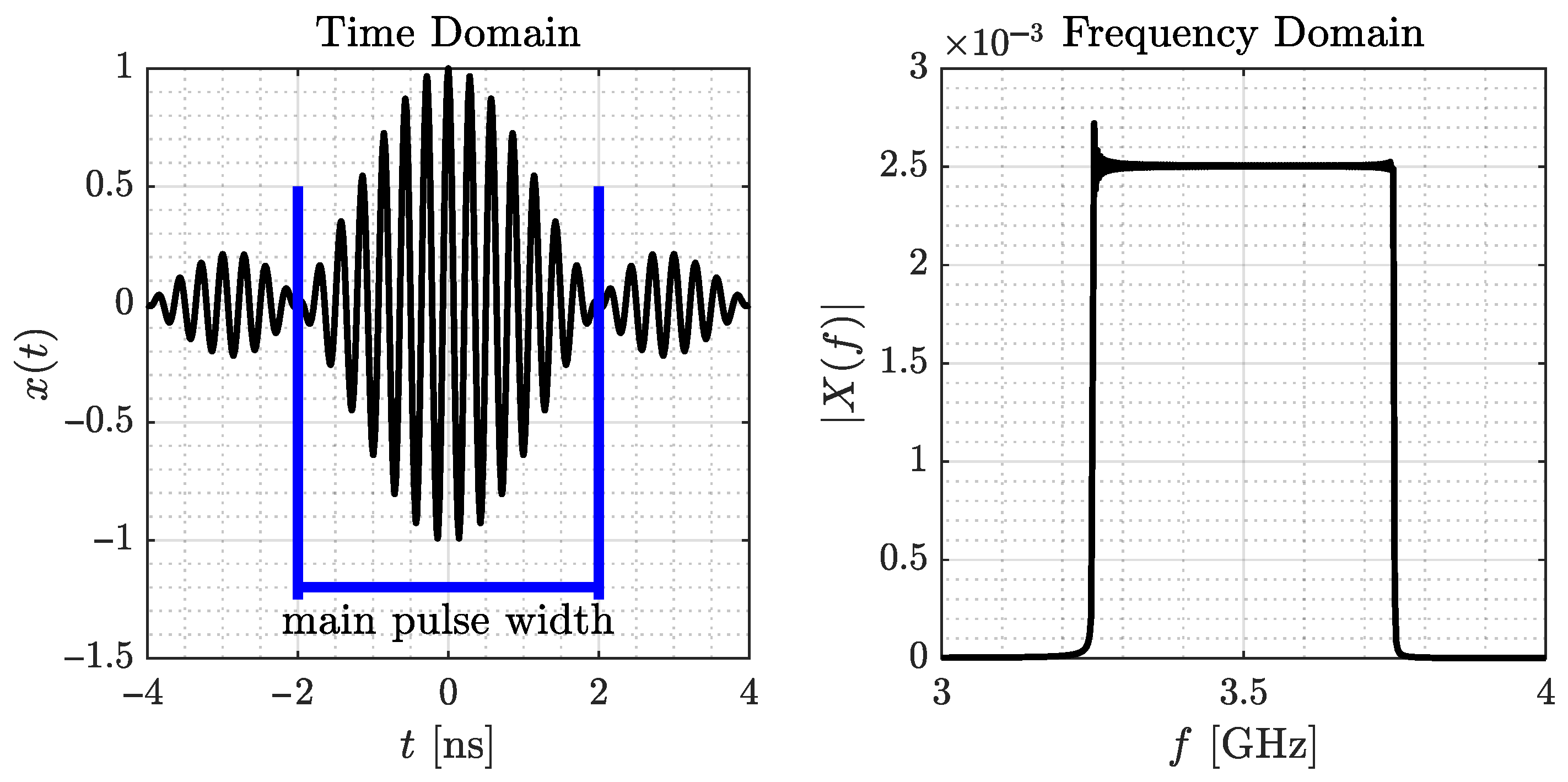
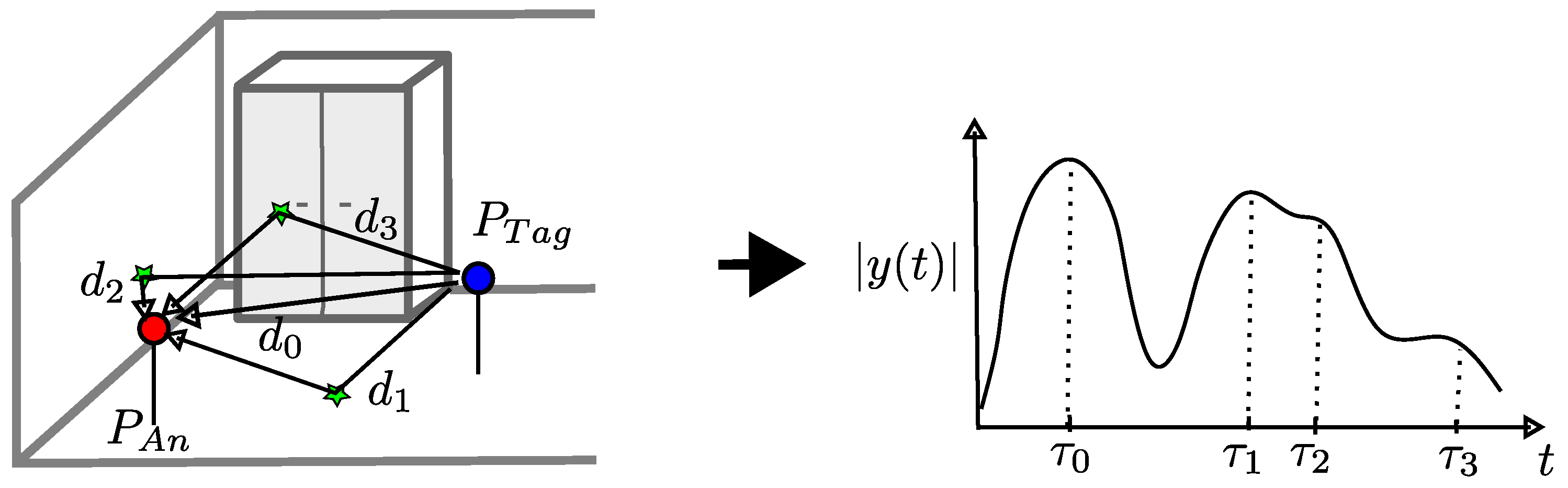
3.1. UWB Signal Propagation in Multipath Environments
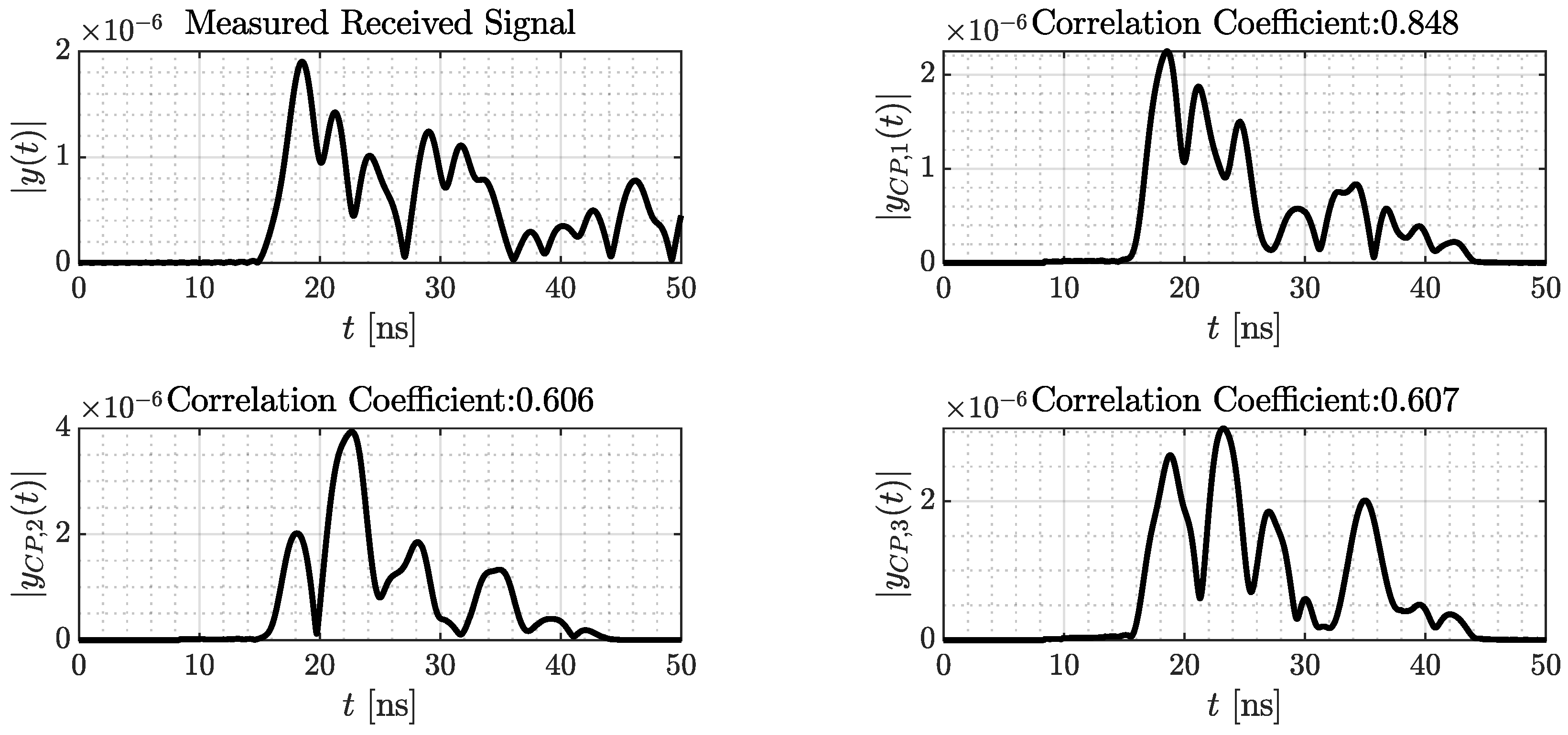
3.2. Correlation between Anchor and Tag Positions and UWB Signals
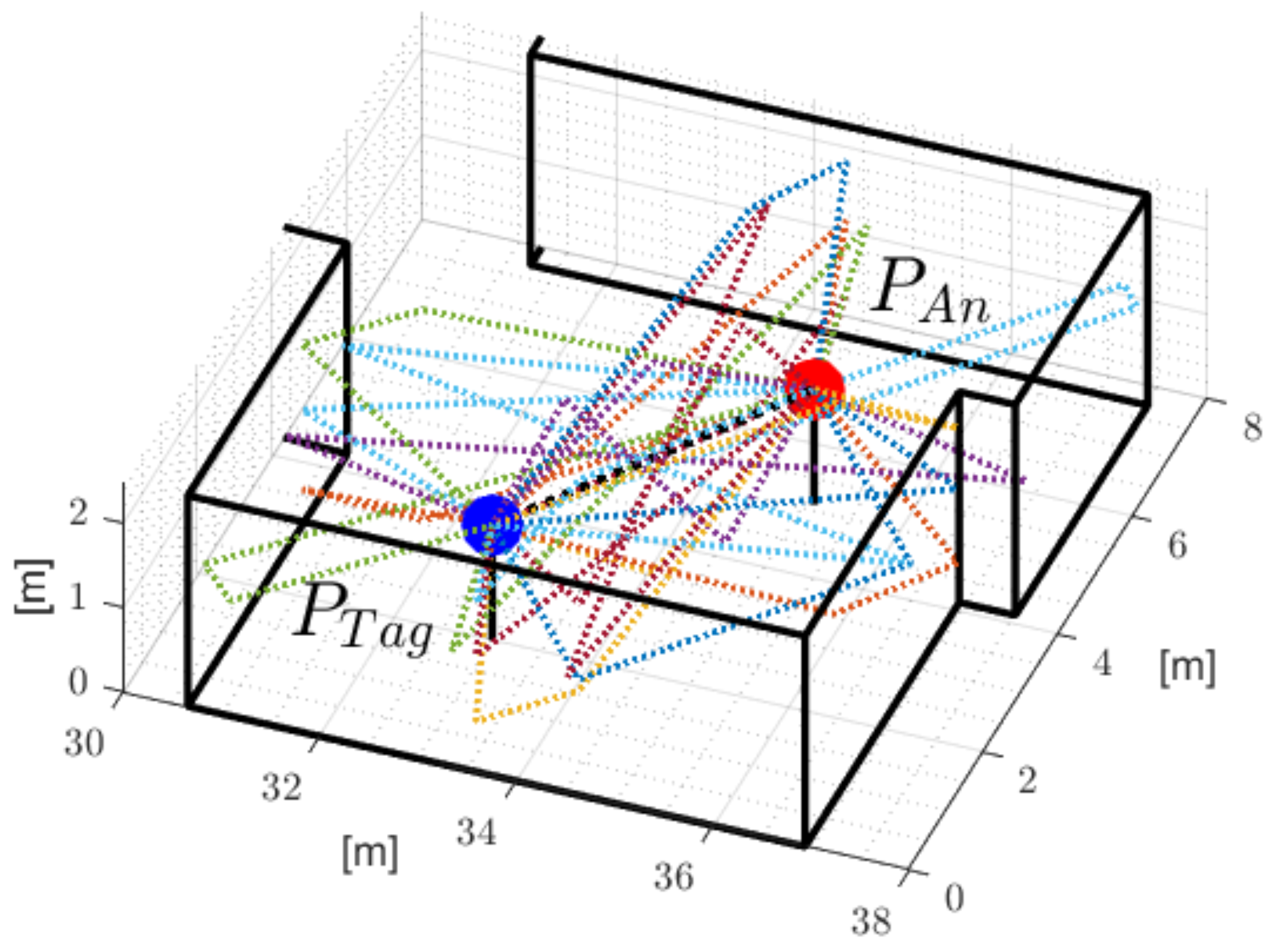
3.3. Modeling of Receive Signals Based on a Given Spatial Geometry
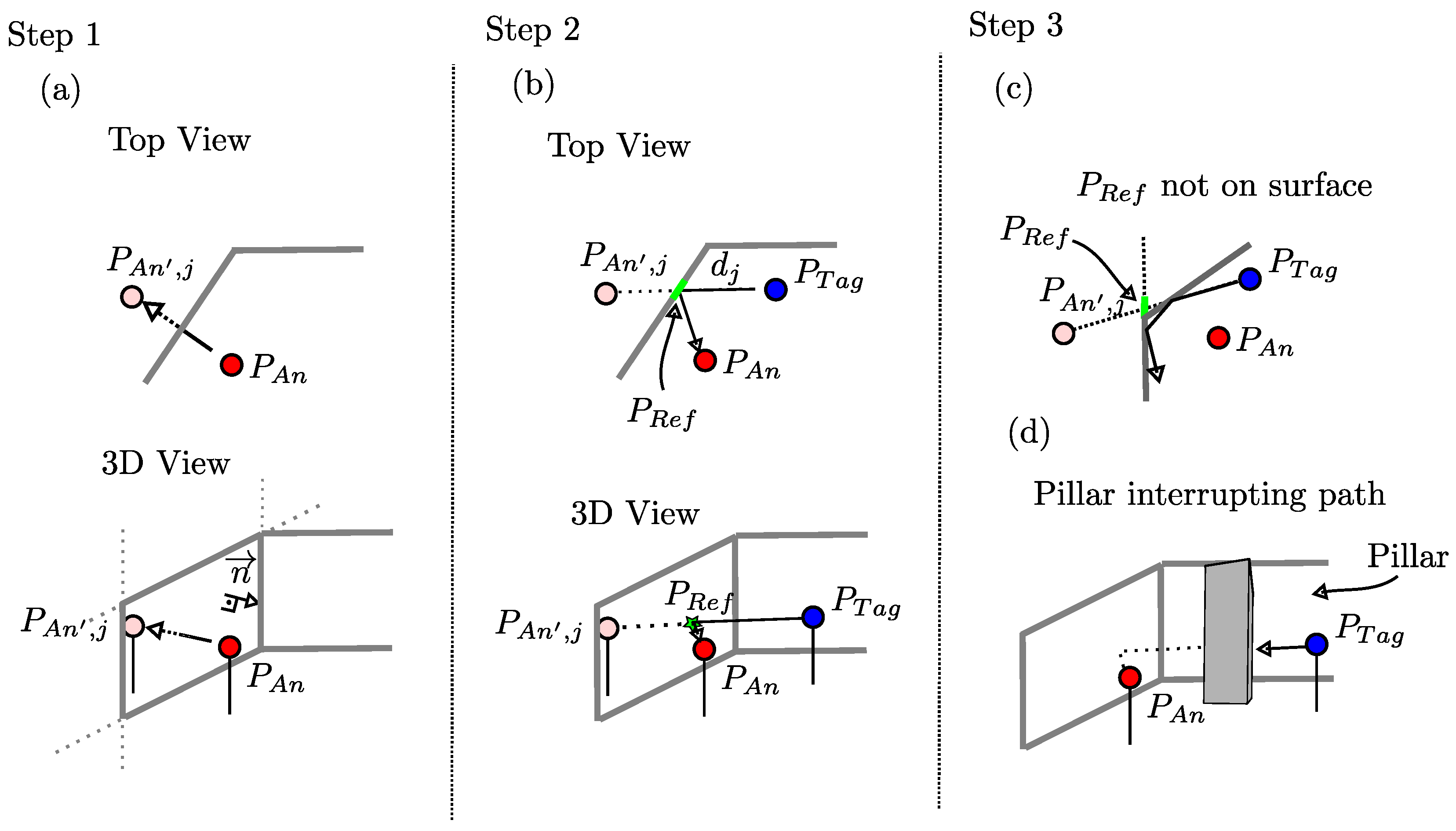
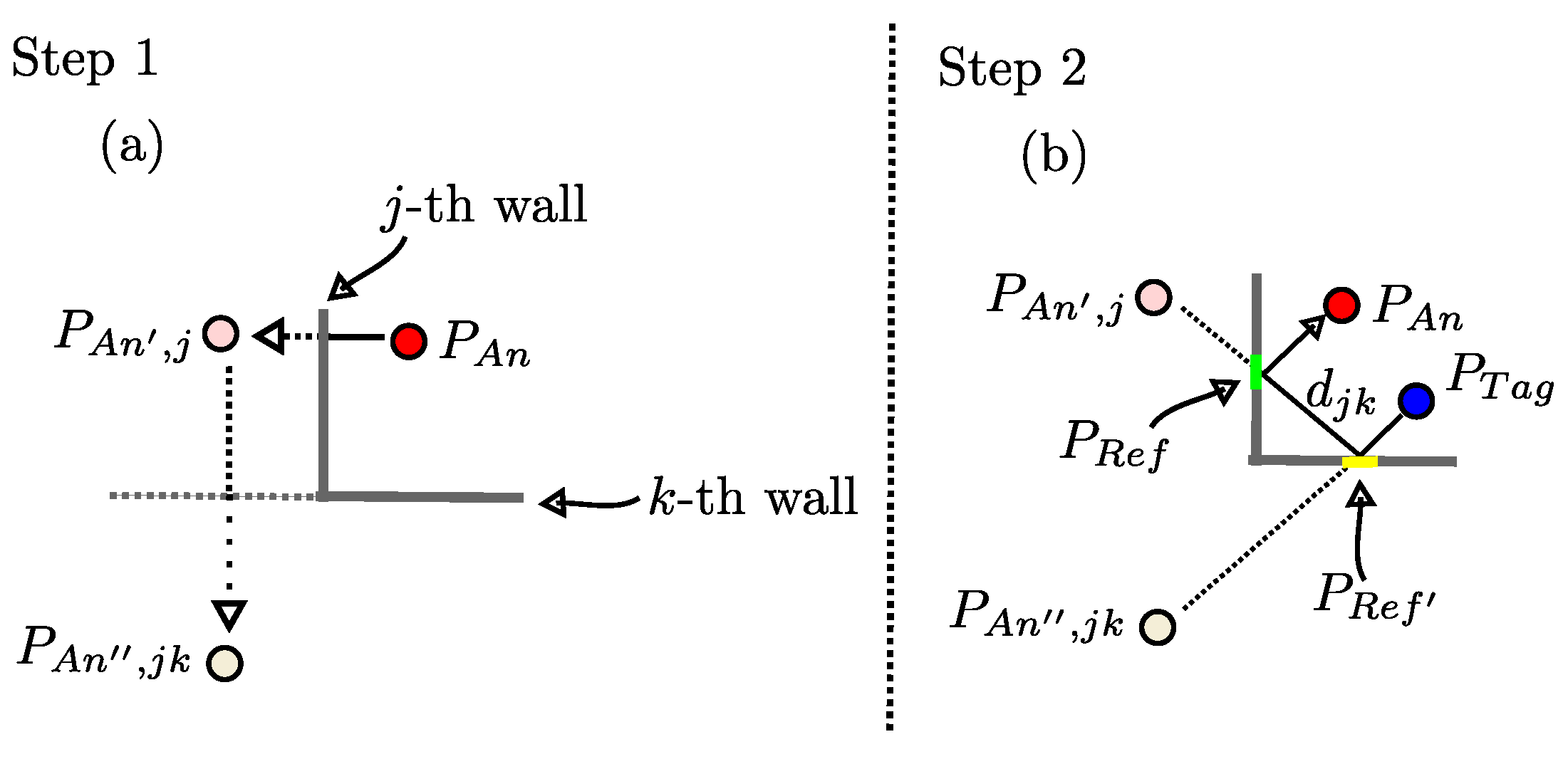
3.3.1. Three-Dimensional Multipath Model for Transmission Delay Estimation
- Expansion of the modeling for :
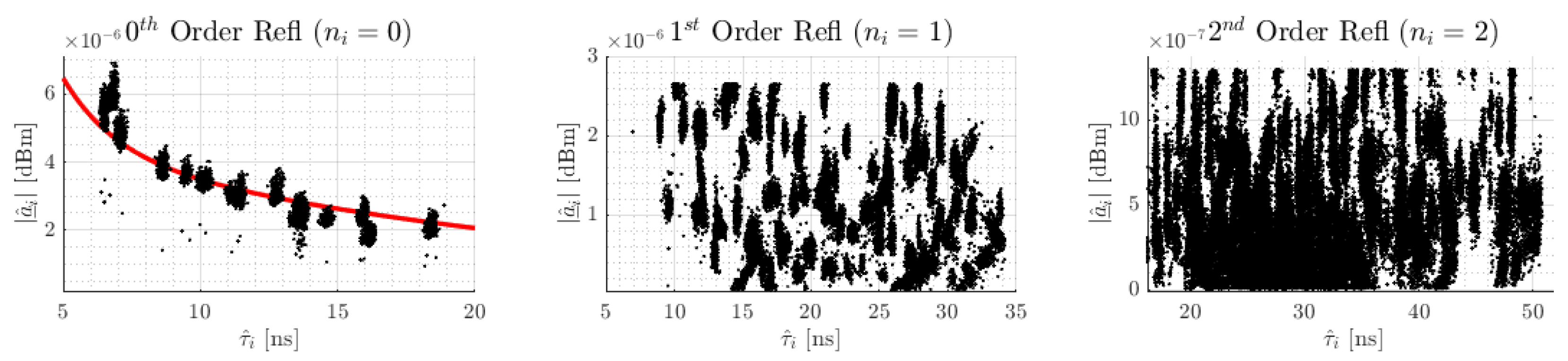
3.3.2. Statistical Analysis of the Amplitude for Estimation
3.3.3. Modeling of the Receive Signals Sets for Reference
4. Localization Algorithm
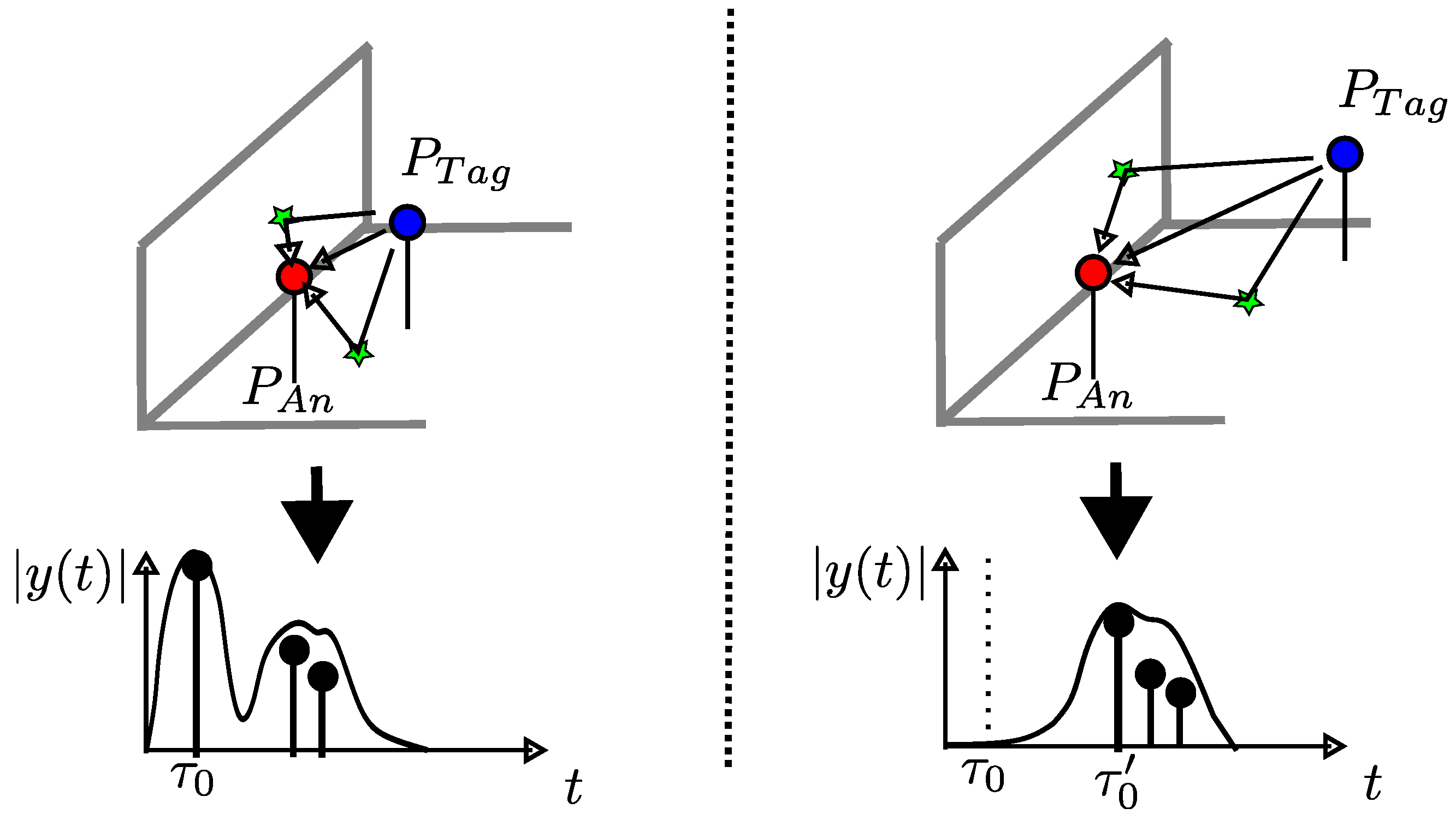
4.1. Optimal Position of the Anchor
- A valid anchor position results in unambiguous CIRs for all tag positions.
- The optimal anchor position achieves the unambiguity of all CIRs with the shortest effective length .
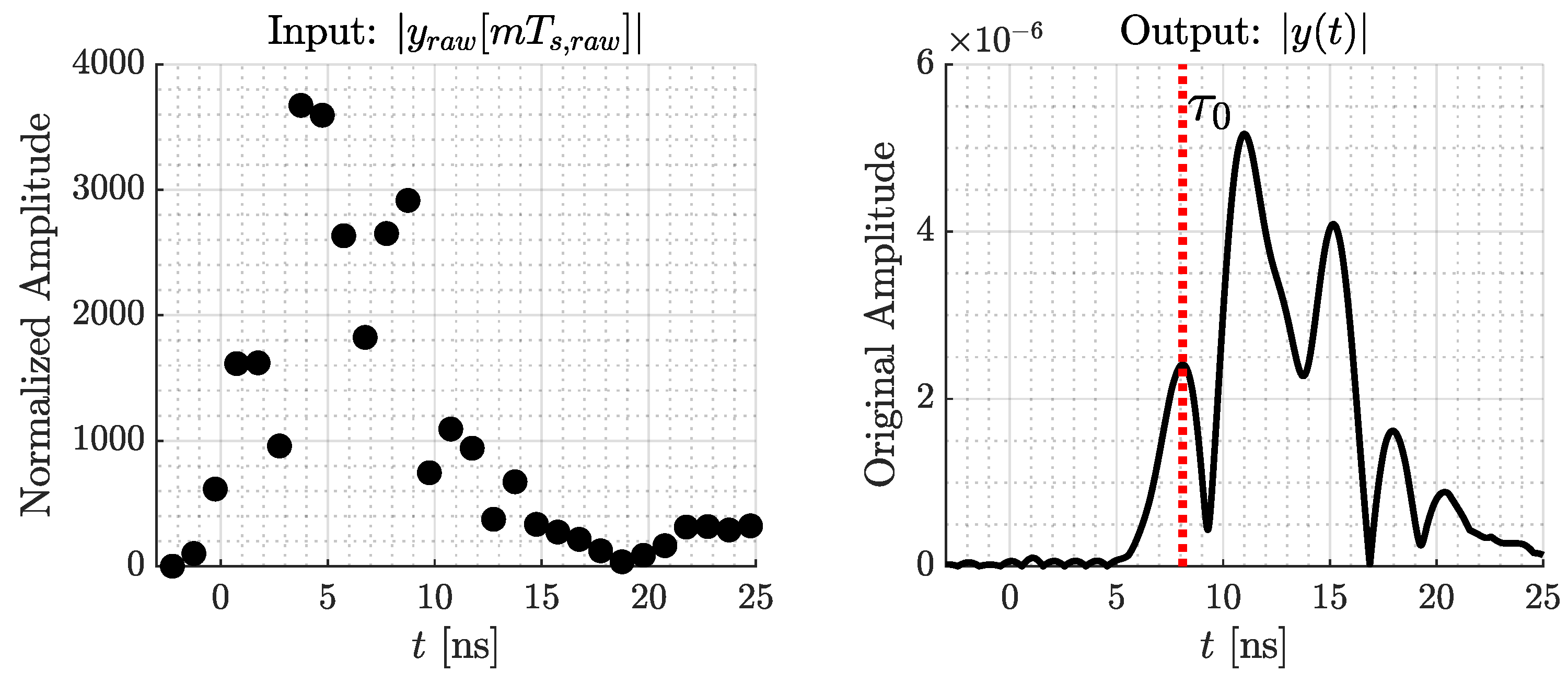
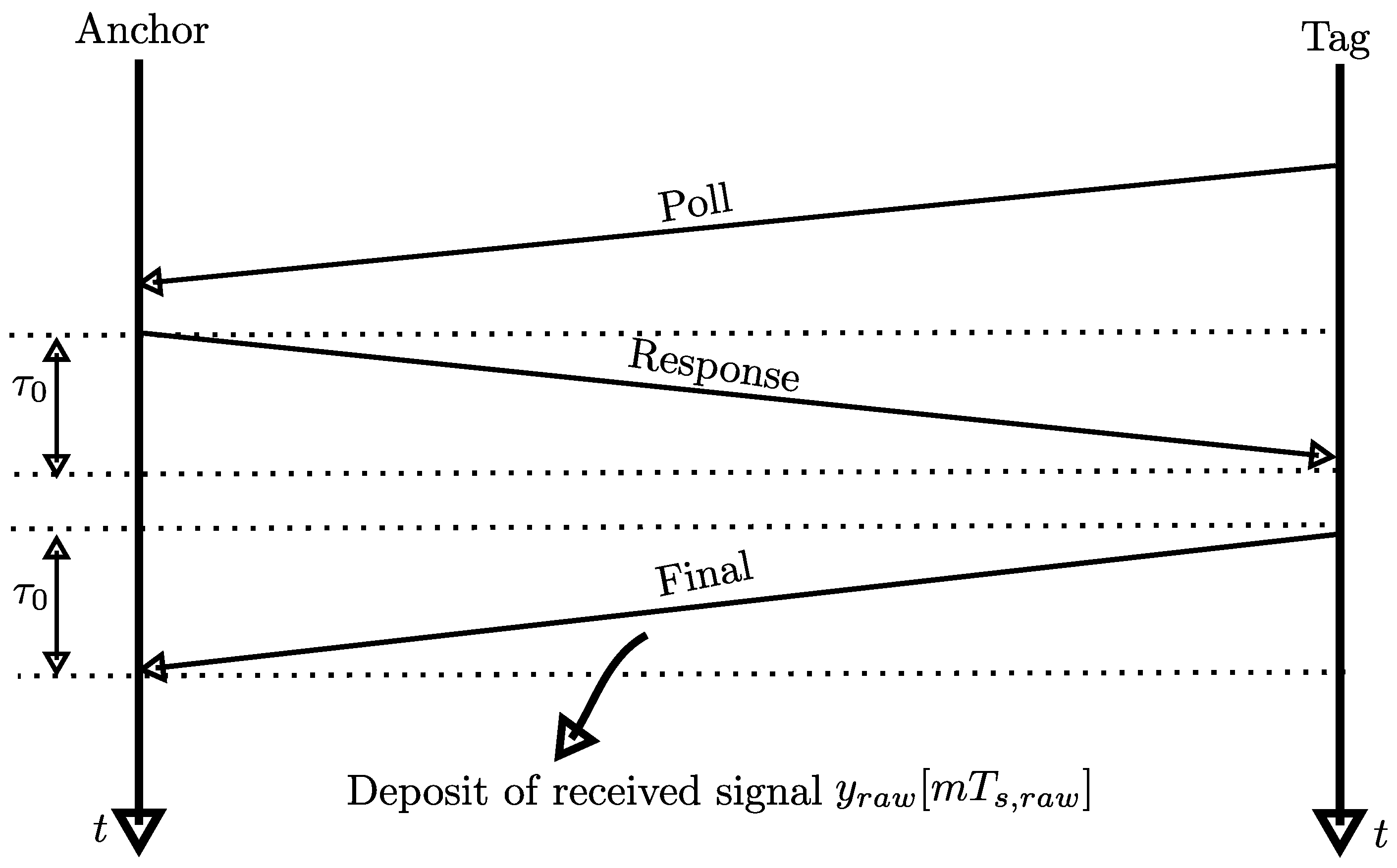
4.2. Signal Processing of Qorvo’s DW1000 Raw Measurements
4.3. Majority-Based Position Estimation
- If a majority of the estimates are identical, then this is also the position estimation .
- If several positions are estimated equally often, then the correlation coefficients of the corresponding estimates are compared. The highest coefficient indicates .
5. System Evaluation
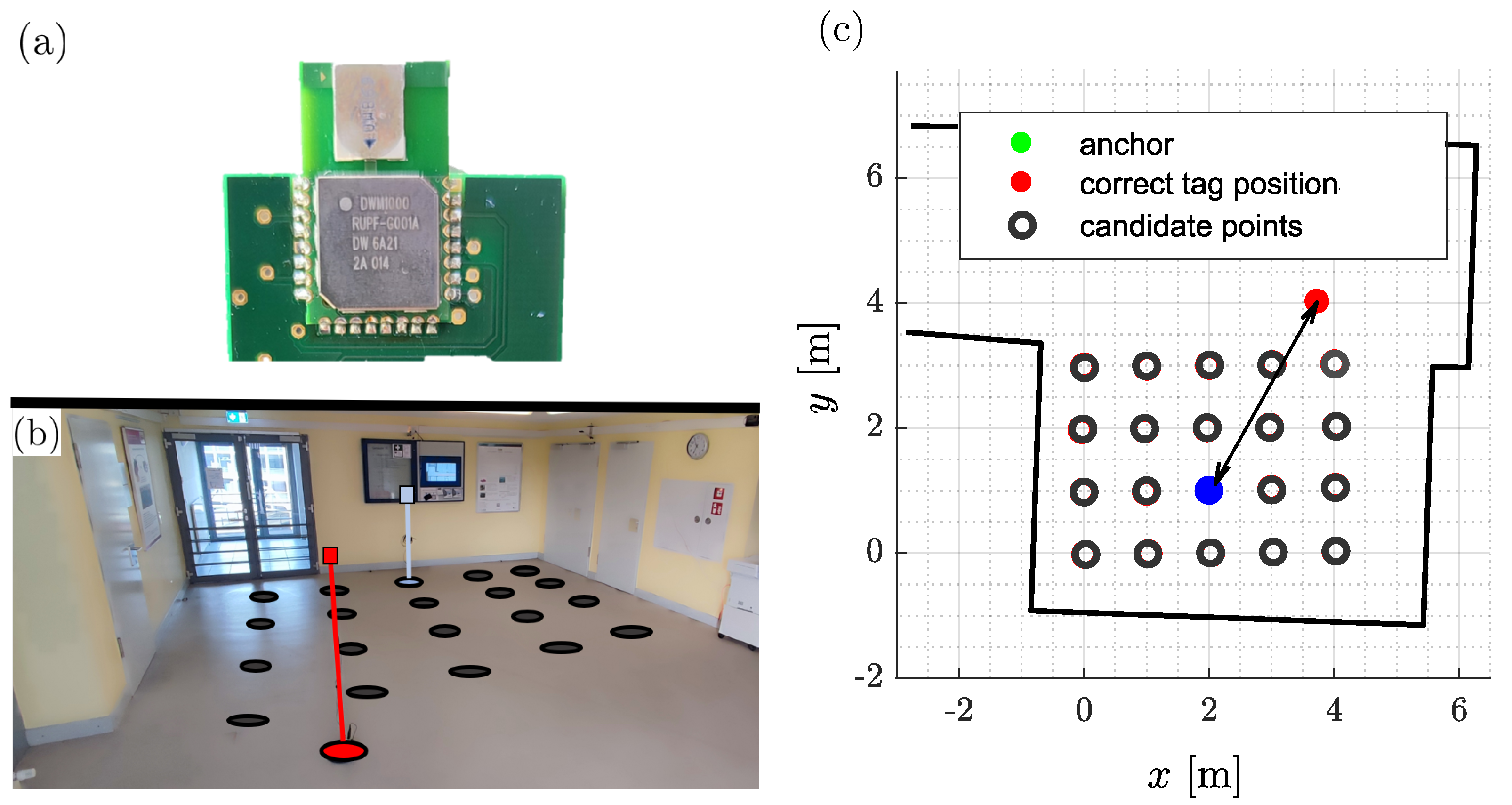
5.1. Evaluation Setup
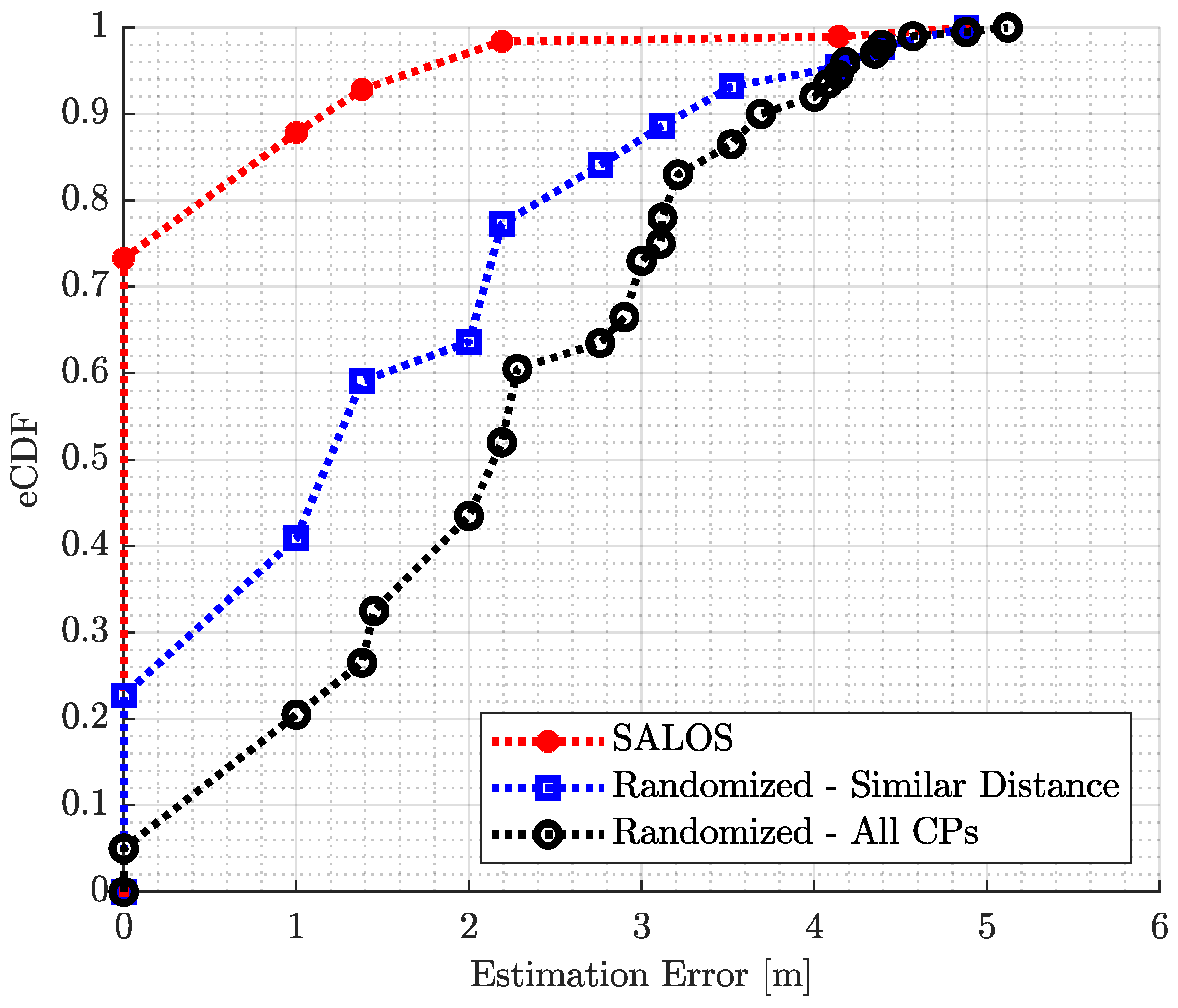
5.2. Evaluation of the Position Estimation Accuracy
5.3. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | analog-to-digital converter |
| AGC | automatic gain control |
| AoA | angle-of-arrival |
| CIR | channel impulse response |
| COTS | commercially off-the-shelf |
| CP | candidate point |
| eCDF | empirical cumulative distribution function |
| ESPAR | electronically steerable parasitic array radiator |
| IMU | inertial measurement unit |
| MQTT | message queuing telemetry transport protocol |
| PDoA | phase difference of arrival |
| RF | radio frequency |
| RSS | receive signal strength |
| SALOS | single anchor localization system |
| TDoA | time difference of arrival |
| TWR | two-way-ranging |
| UWB | ultra-wideband |
| 3D | three-dimensional |
Appendix A. DW1000 Distance Estimation via Two-Way Ranging

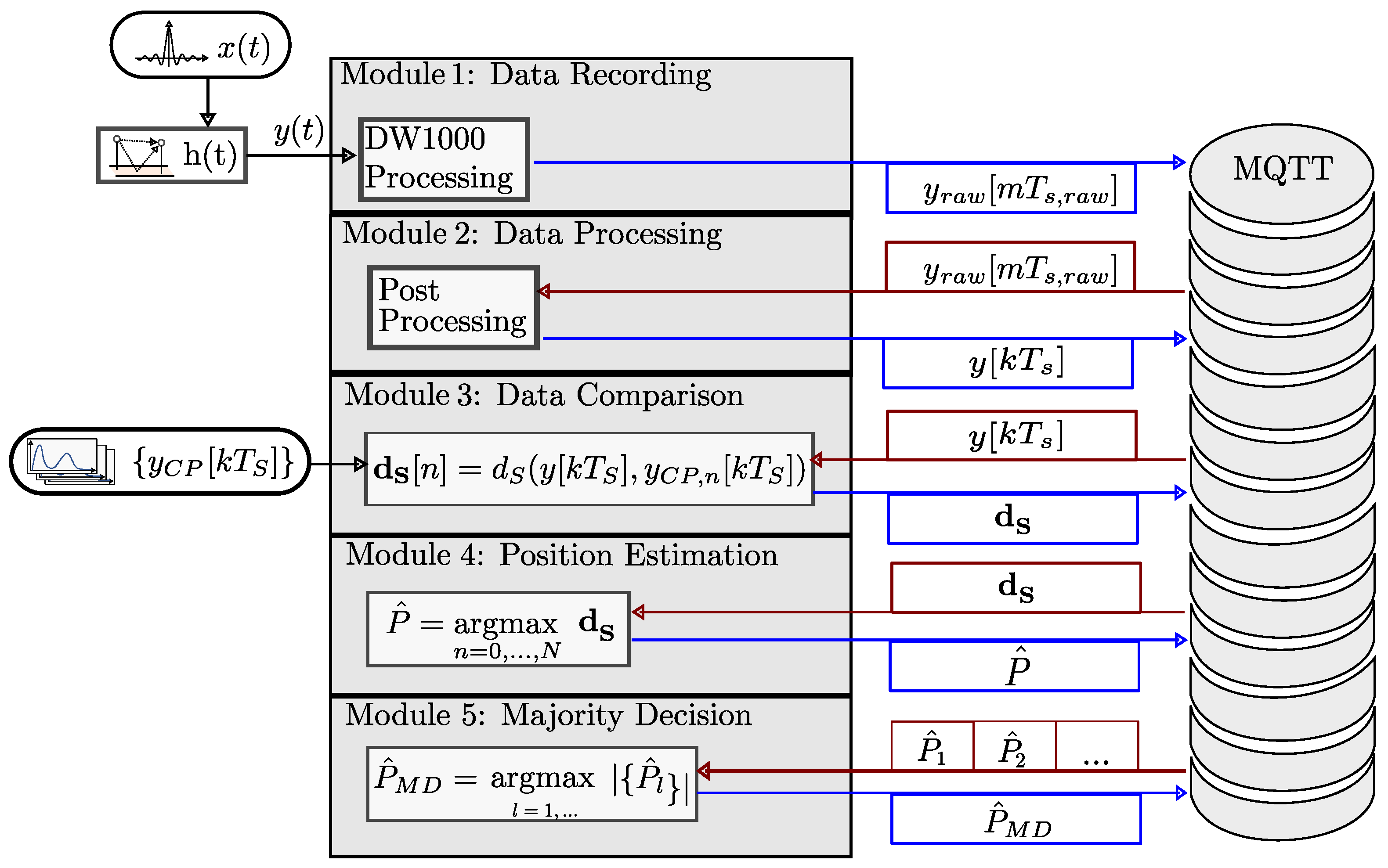
Appendix B. The Modular Live-Streaming Structure of SALOS

References
- Rahman, A.M.; Li, T.; Wang, Y. Recent advances in indoor localization via visible lights: A survey. Sensors 2020, 20, 1382. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Cheng, L.; Qian, K.; Wang, J.; Wang, J.; Liu, Y. Indoor acoustic localization: A survey. Hum.-Centric Comput. Inf. Sci. 2020, 10, 1–24. [Google Scholar] [CrossRef]
- Morar, A.; Moldoveanu, A.; Mocanu, I.; Moldoveanu, F.; Radoi, I.E.; Asavei, V.; Gradinaru, A.; Butean, A. A comprehensive survey of indoor localization methods based on computer vision. Sensors 2020, 20, 2641. [Google Scholar] [CrossRef] [PubMed]
- Leugner, S.; Hellbrück, H. Lessons Learned: Indoor Ultra-Wideband Localization Systems for an Industrial IoT Application; Technical Report; Technische Universität Braunschweig: Braunschweig, Germany, 2018. [Google Scholar] [CrossRef]
- Meissner, P.; Witrisal, K. Multipath-assisted single-anchor indoor localization in an office environment. In Proceedings of the 2012 19th International Conference on Systems, Signals and Image Processing (IWSSIP), Vienna, Austria, 11–13 April 2012; pp. 22–25. [Google Scholar]
- Han, G.; Jiang, J.; Zhang, C.; Duong, T.Q.; Guizani, M.; Karagiannidis, G.K. A survey on mobile anchor node assisted localization in wireless sensor networks. IEEE Commun. Surv. Tutor. 2016, 18, 2220–2243. [Google Scholar] [CrossRef]
- Shokry, A.; Elhamshary, M.; Youssef, M. DynamicSLAM: Leveraging human anchors for ubiquitous low-overhead indoor localization. IEEE Trans. Mob. Comput. 2020, 20, 2563–2575. [Google Scholar] [CrossRef]
- Ye, F.; Chen, R.; Guo, G.; Peng, X.; Liu, Z.; Huang, L. A low-cost single-anchor solution for indoor positioning using BLE and inertial sensor data. IEEE Access 2019, 7, 162439–162453. [Google Scholar] [CrossRef]
- Guerra, A.; Guidi, F.; Dardari, D. Single-anchor localization and orientation performance limits using massive arrays: MIMO vs. beamforming. IEEE Trans. Wirel. Commun. 2018, 17, 5241–5255. [Google Scholar] [CrossRef]
- Pelka, M.; Bartmann, P.; Leugner, S.; Hellbrück, H. Minimizing Indoor Localization Errors for Non-Line-of-Sight Propagation. In Proceedings of the International Conference on Localization and GNSS, Guimaraes, Portugal, 26–28 June 2018. [Google Scholar]
- Cerro, G.; Ferrigno, L.; Laracca, M.; Miele, G.; Milano, F.; Pingerna, V. Uwb-based indoor localization: How to optimally design the operating setup? IEEE Trans. Instrum. Meas. 2022, 71, 9509012. [Google Scholar] [CrossRef]
- Witrisal, K.; Meissner, P.; Leitinger, E.; Shen, Y.; Gustafson, C.; Tufvesson, F.; Haneda, K.; Dardari, D.; Molisch, A.F.; Conti, A.; et al. High-accuracy localization for assisted living: 5G systems will turn multipath channels from foe to friend. IEEE Signal Process. Mag. 2016, 33, 59–70. [Google Scholar] [CrossRef]
- Schmidt, S.O.; Cimdins, M.; Hellbrück, H. On the Effective Length of Channel Impulse Responses in UWB Single Anchor Localization. In Proceedings of the International Conference on Localization and GNSS, Nuremberg, Germany, 4–6 June 2019. [Google Scholar] [CrossRef]
- Schmidt, S.O.; Cimdins, M.; Hellbrueck, H. SALOS—A UWB Single Anchor Localization System based on CIR-vectors—Design and Evaluation. In Proceedings of the International Conference for Indoor Positioning and Navigation (IPIN) 2022, Beijing, China, 5–7 September 2022; pp. 1–16. Available online: https://ceur-ws.org/Vol-3248/paper30.pdf (accessed on 3 April 2024).
- Pau, G.; Arena, F.; Gebremariam, Y.E.; You, I. Bluetooth 5.1: An analysis of direction finding capability for high-precision location services. Sensors 2021, 21, 3589. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, Y.; Zhang, C.; Huai, J.; Li, Y.; Chen, L.; Chen, R. Bluetooth localization technology: Principles, applications, and future trends. IEEE Internet Things J. 2022, 9, 23506–23524. [Google Scholar] [CrossRef]
- Cimdins, M.; Schmidt, S.O.; John, F.; Constapel, M.; Hellbrück, H. MA-RTI: Design and Evaluation of a Real-World Multipath-Assisted Device-Free Localization System. Sensors 2023, 23, 2199. [Google Scholar] [CrossRef] [PubMed]
- Ge, F.; Shen, Y. Single-Anchor Ultra-Wideband Localization System Using Wrapped PDoA. IEEE Trans. Mob. Comput. 2022, 21, 4609–4623. [Google Scholar] [CrossRef]
- Wang, T.; Li, Y.; Liu, J.; Hu, K.; Shen, Y. Multipath-Assisted Single-Anchor Localization via Deep Variational Learning. IEEE Trans. Wirel. Commun. 2024. [Google Scholar] [CrossRef]
- Rzymowski, M.; Woznica, P.; Kulas, L. Single-Anchor Indoor Localization Using ESPAR Antenna. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1183–1186. [Google Scholar] [CrossRef]
- Groth, M.; Nyka, K.; Kulas, L. Fast Calibration-Free Single-Anchor Indoor Localization Based on Limited Number of ESPAR Antenna Radiation Patterns. In Proceedings of the 2023 17th European Conference on Antennas and Propagation (EuCAP), Florence, Italy, 26–31 March 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Großwindhager, B.; Rath, M.; Kulmer, J.; Bakr, M.S.; Boano, C.A.; Witrisal, K.; Römer, K. SALMA: UWB-based single-anchor localization system using multipath assistance. In Proceedings of the 16th ACM Conference on Embedded Networked Sensor Systems, Shenzhen, China, 4–7 November 2018; pp. 132–144. [Google Scholar]
- Wang, T.; Zhao, H.; Shen, Y. An efficient single-anchor localization method using ultra-wide bandwidth systems. Appl. Sci. 2019, 10, 57. [Google Scholar] [CrossRef]
- Meissner, P.; Steiner, C.; Witrisal, K. UWB positioning with virtual anchors and floor plan information. In Proceedings of the 2010 7th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 11–12 March 2010; pp. 150–156. [Google Scholar]
- Mohammadmoradi, H.; Heydariaan, M.; Gnawali, O.; Kim, K. UWB-based single-anchor indoor localization using reflected multipath components. In Proceedings of the 2019 International Conference on Computing, Networking and Communications (ICNC), Honolulu, HI, USA, 18–21 February 2019; pp. 308–312. [Google Scholar]
- IEEE Std 802.15.4-2020; IEEE Standard for Low-Rate Wireless Networks–Amendment 1: Enhanced Ultra Wideband (UWB) Physical Layers (PHYs) and Associated Ranging Techniques. IEEE Standards Association: Piscataway, NJ, USA, 2020.
- Decawave Ltd. DW1000 User Manual, Version 2.11; Decawave Ltd.: Dublin, Ireland, 2017. [Google Scholar]
- Foerster, J. The effects of multipath interference on the performance of UWB systems in an indoor wireless channel. In Proceedings of the IEEE VTS 53rd Vehicular Technology Conference, Spring 2001, Proceedings (Cat. No.01CH37202), Rhodes, Greece, 6–9 May 2001; Volume 2, pp. 1176–1180. [Google Scholar] [CrossRef]
- Schmidt, S.O.; Hellbrueck, H. Detection and Identification of Multipath Interference with Adaption of Transmission Band for UWB Transceiver Systems. In Proceedings of the International Conference for Indoor Positioning and Navigation (IPIN) 2021, Lloret de Mar, Spain, 29 November–2 December 2021; pp. 1–16. Available online: https://ceur-ws.org/Vol-3097/paper4.pdf (accessed on 3 April 2024).
- Friis, H. A Note on a Simple Transmission Formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Decawave Ltd. APS011 Application Note—Sources of Error in DW1000 Based Two-Way Ranging (TWR) Schemes; Version 1.1; Decawave Ltd.: Dublin, Ireland, 2014. [Google Scholar]
- John, F.; Schmidt, S.O.; Hellbrück, H. Flexible Arbitrary Signal Generation and Acquisition System for Compact Underwater Measurement Systems and Data Fusion. In Proceedings of the OCEANS 2021: San Diego–Porto, San Diego, CA, USA, 20–23 September 2021; pp. 1–6. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order of Reflection | Magnitude | Phase |
|---|---|---|
| Setting | Value |
|---|---|
| UWB channel | 1 |
| Center frequency | GHz |
| Bandwidth B | MHz |
| Pulse repetition frequency | 64 |
| Preamble length | 128 |
| Preamble acquisition chunk size | 8 |
| Preamble code anchor and tag | 9 |
| Data rate | 6.8 MBit/s |
| Name | Coordinates | Name | Coordinates |
|---|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmidt, S.O.; Cimdins, M.; John, F.; Hellbrück, H. SALOS—A UWB Single-Anchor Indoor Localization System Based on a Statistical Multipath Propagation Model. Sensors 2024, 24, 2428. https://doi.org/10.3390/s24082428
Schmidt SO, Cimdins M, John F, Hellbrück H. SALOS—A UWB Single-Anchor Indoor Localization System Based on a Statistical Multipath Propagation Model. Sensors. 2024; 24(8):2428. https://doi.org/10.3390/s24082428
Chicago/Turabian StyleSchmidt, Sven Ole, Marco Cimdins, Fabian John, and Horst Hellbrück. 2024. "SALOS—A UWB Single-Anchor Indoor Localization System Based on a Statistical Multipath Propagation Model" Sensors 24, no. 8: 2428. https://doi.org/10.3390/s24082428