1. Introduction
Angle sensors are widely used in various applications where precise angle measurements are required, including automobiles [
1], aviation servo systems [
2], and industrial robots [
3]. Depending on the underlying angle measurement method, angle sensors can be divided into contact angle sensors [
4] and non-contact angle sensors [
5,
6,
7]. Contact angle sensors are mainly the potentiometer-type angle sensors [
8], where the presence of friction during measurements makes these sensors more prone to wear, electrical noise, short life, etc. Non-contact angle sensors, on the other hand, can be further divided into capacitive, photoelectric, and magnetoelectric angle sensors. Capacitive angle sensors have the advantage of low power consumption and high sensitivity [
9,
10,
11], but this sensor has poor temperature stability and low measurement accuracy. Meanwhile, photoelectric angle sensors need an independent light source, and since environmental factors affect the light propagation, such sensors require tight sealing to ensure their use in harsh environments [
12,
13,
14]. Magnetoelectric angle sensors include Hall sensors, magnetostrictive sensors, and electromagnetic induction-type sensors. Hall-type angle sensors have the advantages of high reliability, long life, and fast response [
15,
16], but this sensor contains a specific structure of the internal permanent magnet, its interchangeability is relatively poor, and the output is non-linear. In addition, the signal of Hall-type sensors is affected by temperature, thus needing a temperature compensation device, and the sensor accuracy is relatively low. Alternatively, magnetostrictive angle sensors have simple installation, high sensitivity, good stability, high power, and high overload capacity [
17,
18]. However, these sensors have a poor resistance to interference and cannot be used with magnetically conductive materials. In contrast, with the advantages of a good structural flexibility, low cost, no required temperature compensation, high environmental adaptability, high accuracy, and good electromagnetic compatibility [
19,
20,
21], electromagnetic induction angle sensors are quite popular in many engineering applications. This paper mainly studies the angle sensor used in the Electric Power Steering (EPS) system. Measuring the angle is an important function of EPS sensors. The function of the EPS system is to detect the torque and direction generated by the steering wheel when the driver is steering. A critical component of the vehicle chassis system, the steering system directly influences the stability, driving comfort, and driving safety of the vehicle. The development of the steering system has progressed through four stages: (i) a Mechanical Steering system; (ii) a Hydraulic Power Steering system; (iii) an Electro-Hydraulic Power Steering; and (iv) an Electric Power Steering system. Among these developments, the EPS system has the advantage of energy saving and environmental protection, and is increasingly used in automobiles.
Existing electromagnetic induction type angle sensors have a flat structure [
22,
23,
24,
25], which mainly has the following defects: relatively large sensor size due to the planar windings; and the two rotors in the sensor exhibit a crosstalk and affect the sensor non-linearity. These issues of planar induction sensors indicate the need to design a new induction angle sensor with a small size and a high linearity. The structural parameters of the electromagnetic induction type angle sensor affect the intensity of the magnetic induction inside the sensor, which in turn affects the linearity of the relationship between the measured angle and the output signal [
26]. Non-linearity is an important parameter to measure the performance of sensors [
27]. To effectively reduce the non-linearity of an angle sensor, it is necessary to optimize the structural parameters of the sensor.
Usually, an optimization algorithm, such as a genetic algorithm [
28], a response surface method [
29], or a particle swarm algorithm [
30], is used for the sensor structure optimization. The selection of genetic algorithm parameters, such as mutation rate and crossover rate, seriously affects the quality of the corresponding optimal solution. At present, the selection of these parameters mostly depends on the experience. The response surface method is not suitable for discrete optimization, and the optimal parameters obtained by this method depend on the degree of fit of the regression equation. The Particle Swarm Optimization (PSO) algorithm was first proposed by Eberhart and Kennedy in 1995, the basic concept of which originates from the study of the foraging behavior of bird flocks. This algorithm is fast and efficient in searching, does not depend on the problem information, and has a strong generality. The PSO algorithm is a generalized swarm intelligence method, commonly used for solving global optimization problems. In this paper, we design a new vertical non-contact induction angle sensor, where we use the Plackett–Burman test to screen the key factors affecting the non-linearity of the sensor, and then use the PSO algorithm to optimize these selected key factors.
3. Non-Linearity Optimization
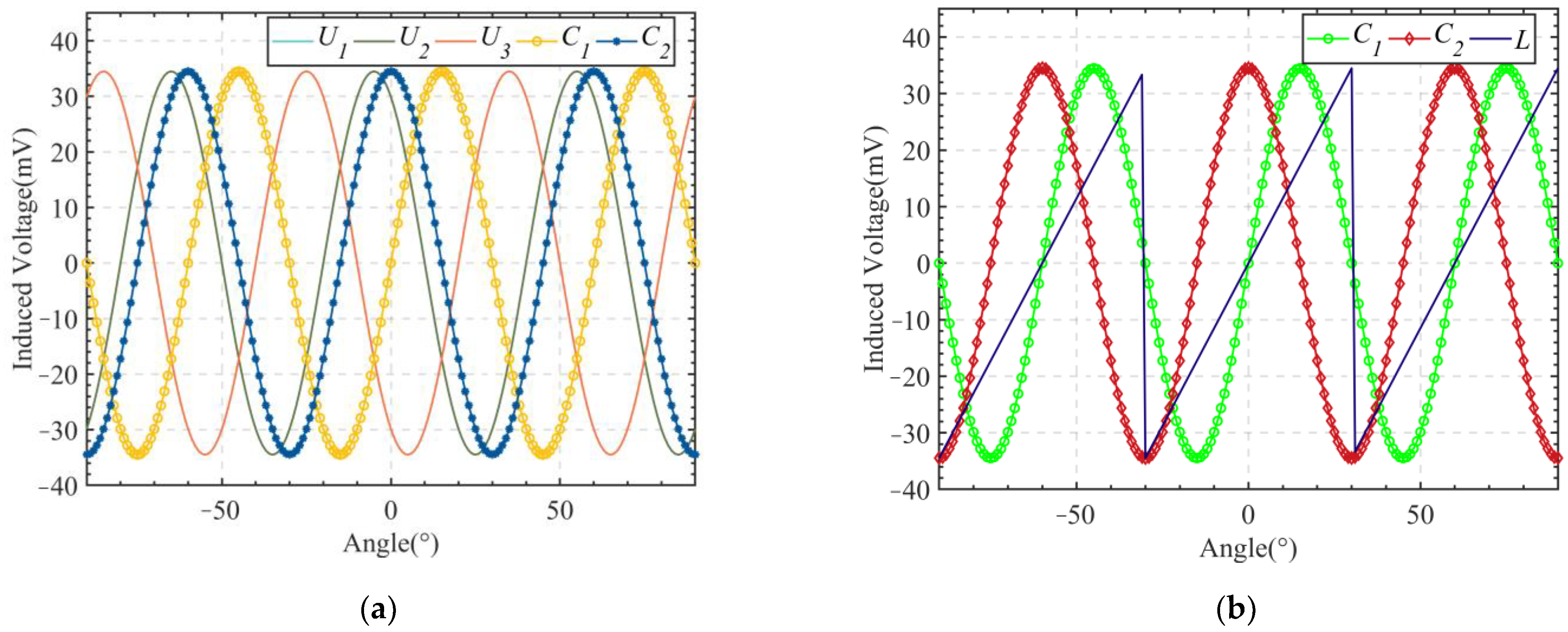
The structural parameters of the vertical non-contact induction angle sensor affect the magnetic induction intensity and the eddy current distribution, which in turn affect the waveform of the induced voltage in the receiving coil. Notably, unreasonable structural parameters lead to distortion of the induced sine waveform, resulting in large non-linearity. Limiting the magnitude of non-linearity is critical to enable a satisfactory performance of the sensor; therefore, the structural parameters of the sensor also needed to be optimized for reduced non-linearity. Before optimization, the three induced voltages needed to be linearized. According to Equation (5), the CLARK transformation was performed on the three induced voltages to transform the three-phase signal into a two-phase signal. The signals before and after the transformation are shown in
Figure 7a. As shown in
Figure 7a, the signal was converted from three-phase to two-phase with the same signal amplitude. Next, the transformed two-phase signal was linearized by Equation (6); the linearized signal is shown in
Figure 7b.
where
C1 and
C2 are the two-phase quadrature winding voltages; and
L is the linearized signal.
The induced voltages of the three receiving coils during one cycle of the rotor rotation were simulated. Next, the induced voltages were linearized and the non-linearity was calculated according to Equation (7). The results are shown in
Table 2, demonstrating that the non-linearity between the simulated and theoretical values was 0.383%.
where
is the ideal voltage;
is the simulation voltage; and
is the voltage range.
By analyzing the results in
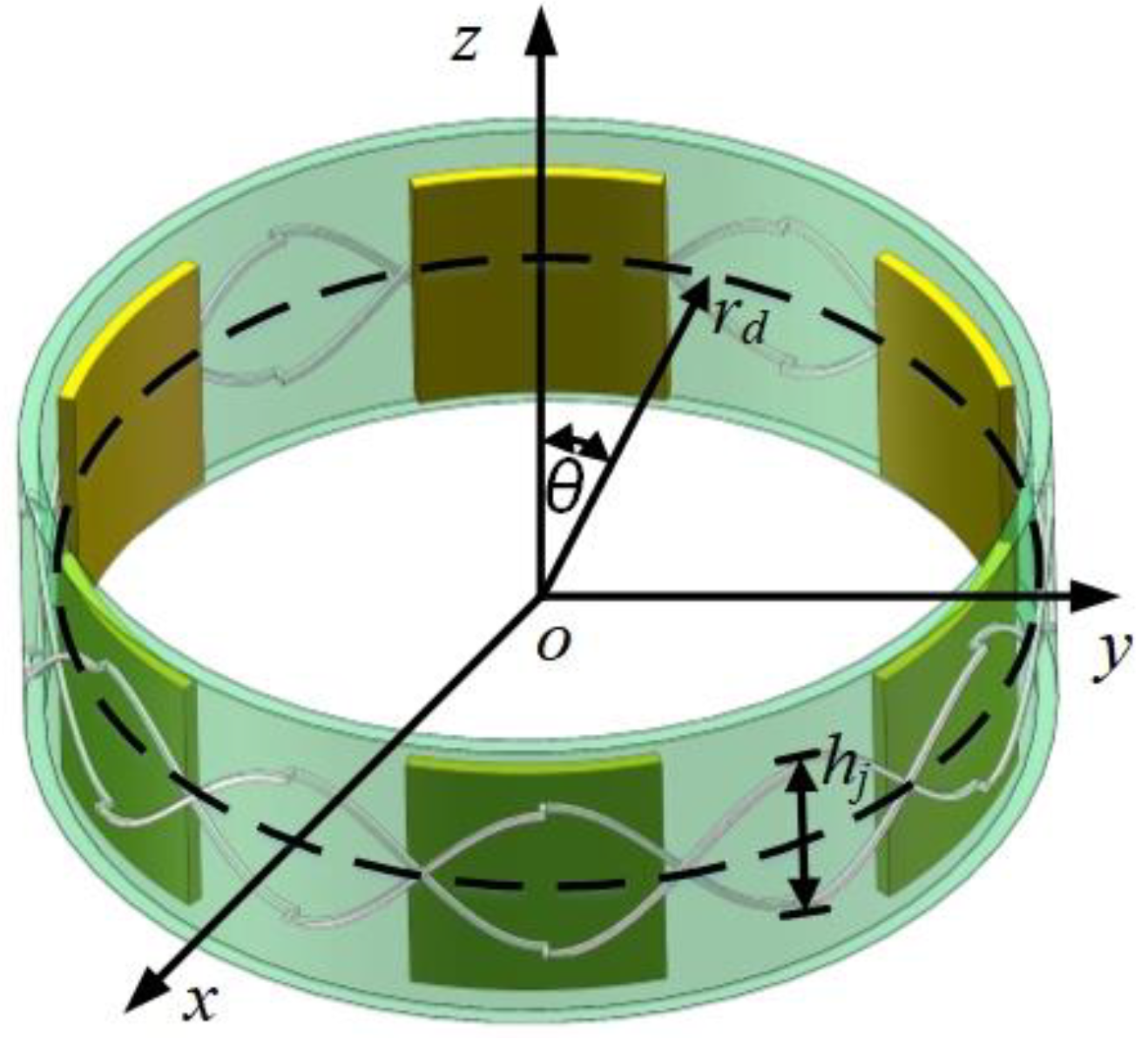
Table 2, it was concluded that the receiving coil induction voltage determined the non-linearity of the vertical non-contact induction angle sensor. Combining Equations (1)–(3), the most intuitive parameters characterizing the influence of the excitation magnetic field and the eddy current magnetic field on the induced voltage of the receiving coil include: the number of turns of the excitation coil and the excitation coil wire width (to characterize the excitation magnetic field effect); the rotor blade thickness and height (to characterize the vortex field action); the air gap between the stator and the rotor (to characterize the joint action of two magnetic fields); and the height of the receiving coil (to characterize the effect of the magnetic field lines passing through the area of receiving coil, generated by the two magnetic fields). The air gap between the stator and the rotor was determined by the stator radius and the rotor radius. In this work, the rotor radius was fixed at 14 mm; therefore, the change in the stator radius mainly characterized the air gap between the stator and the rotor.
Simultaneous multi-objective optimization often results in wasted resources and low efficiency; therefore, the key factors affecting the sensor non-linearity index need to be appropriately identified before the actual optimization. The Plackett–Burman test is a test method for analytical analysis that is used to estimate the effect of a factor as accurately as possible with a minimum number of trials. This method is suitable for quickly and efficiently screening the most important factors among all the influencing factors, which can be then further investigated. The experimental process here was to code multiple factors at high and low levels, analyze the inter-subjective effects and significance levels of the factors based on the results of Plackett–Burman test, and then filter out the factors with the highest effect on the test results. This essentially reduced the number of factors involved in the optimization. The non-linearity of the vertical non-contact induction angle sensor was first evaluated in terms of the number of turns of the excitation coil, the stator radius, the excitation coil line width, the rotor blade thickness, the rotor length, and the receiver coil height, and then the main affecting factors were selected. Specifically, the above six factors were coded and the lowest (−1) and highest (1) levels were taken for each factor for 12 sets of tests. The experimental factor codes and the high and low levels taken are shown in
Table 3.
Progressively, the Plackett–Burman experimental design scheme is shown in
Table 4, while
Table 5 shows the evaluation table for the effect of each factor. Next, the data were subjected to a multi-distance regression analysis and the optimal equation for the non-linearity was obtained, as shown in Equation (8).
By analyzing the evaluation table for the effect of each factor (
Table 5), the key factors affecting the sensor non-linearity were sorted according to the magnitude of their effect, as follows:
X2 >
X4 >
X1 >
X6 >
X5 >
X3. Among them, the effects of the stator radius and the rotor blade thickness reached an extremely significant level (
p < 0.001), while the effects of the excitation coil turns, the excitation coil wire width, the rotor length, and the receiver coil height were not very significant. Therefore, two key factors, the stator radius and the rotor blade thickness, were selected for inclusion in the subsequent optimization.
Typically, the factors screened using the Plackett–Burman test are used in response surface analysis studies. The optimal parameters obtained using the response surface optimization method depend on the degree of fit of the regression equation, where different regression equations yield different optimal values. In contrast, this paper used the PSO algorithm to optimize the screened factors for reduced non-linearity, which is a mainstream optimization algorithm with fast convergence and only a few setup parameters for the sensor.
In the PSO algorithm, the PSO search space is an n-dimensional space, where the particle population consists of
N particles and each particle in the population is initialized with a randomized position (
) and velocity (
), i.e.,
;
. At time,
t, the position,
, can be considered as a set of coordinates of a point in the n-dimensional space. The particles fly through the virtual space looking for the candidate solutions and attracting the surrounding particles to a location that produces the best results. Moreover,
is the individual best position of the
i-th particle at moment,
t, and
is the global best position of the entire particle population at moment, t. The velocity update formula of a particle in the PSO algorithm is given in Equation (9). Meanwhile, the maximum distance traveled by a particle in one iteration cycle was determined using the velocity, as expressed in Equation (10). The position and the velocity of each particle were updated once for each iteration of the algorithm. It should be noted that a larger value of inertia weight,
ω, is beneficial for improving the global search capability of the algorithm, while a smaller value improves the accuracy of local search. Therefore, the inertia weight,
ω, used in this work decreased linearly with the number of iterations, as shown in Equation (11), which ensured the global search capability of the algorithm while avoiding falling into the local optimal solutions.
where
c1-PSO and
c2-PSO are the acceleration coefficients;
r1-PSO and
r2-PSO are the uniformly distributed random numbers on the interval [0, 1];
i = 1, 2, …
NPSO,
NPSO is the particle swarm size;
j = 1, 2,…
n,
n is the number of spatial dimensions;
ω is the value of the inertia weights;
ωmax is the maximum value of the inertia weight;
ωmin is the minimum value of the inertia weights; and
tmax is the maximum number of iteration steps.
To minimize the non-linearity of the proposed sensor, the first step was to establish the objective function of the optimization problem. The objective function needs to satisfy one or more conditions to obtain the optimal solution by adjusting the system parameters. The non-linearity optimization of the vertical non-contact induction angle sensors is a bi-objective optimization problem, and there is incommensurability between the two objectives, i.e., there exists a conflicting relationship between the two objectives. Specifically, when one of the objective functions reaches the optimality, the other objective function may become worse. On the other hand, this phenomenon is not present in single-objective optimization problems; therefore, the bi-objective optimization problem needs to be converted into a single-objective optimization problem. Accordingly, in this paper, the objective function for optimization was reconstructed, where the weight coefficients were introduced to reflect the importance of the two objectives in the overall objective function, as shown in Equations (12)–(14).
where
is the objective function of the rotor thickness parameter;
is the objective function of stator radius parameter;
is the non-linear degree of reconstruction;
is the rotor thickness weighting factor;
is the stator radius weighting factor;
is the ideal voltage for rotor thickness;
is the simulation voltage for rotor thickness;
is the ideal voltage for stator radius;
is the simulation voltage for stator radius;
Urmax is the maximum voltage range of rotor thickness;
Udmax is the maximum voltage range of stator radius.
and
are the weight coefficients introduced to transform the bi-objective optimization problem into a single-objective extremum problem. The weight coefficients were normalized according to the effect values obtained using the Plackett–Burman test. In particular, the stator radius effect value (
Ed) of 0.053 and the rotor blade thickness effect value (
Er) of 0.024 in
Table 5 were normalized to within the range [0, 1]. Then, the weighting coefficients for the stator radius and the rotor blade thickness were expressed as:
Additionally, the search ranges for the rotor thickness and the stator radius are shown in
Table 6, and the parameters of the PSO algorithm were set as follows: the number of particles was set to 30; the learning factor
c1 =
c2 = 1.4945; the maximum velocity was limited to 0.05; the minimum velocity was limited to −0.05; the number of iterations was set to 30; the maximum inertia weight value
ωmax = 0.9; the minimum inertia weight value
ωmin = 0.4.
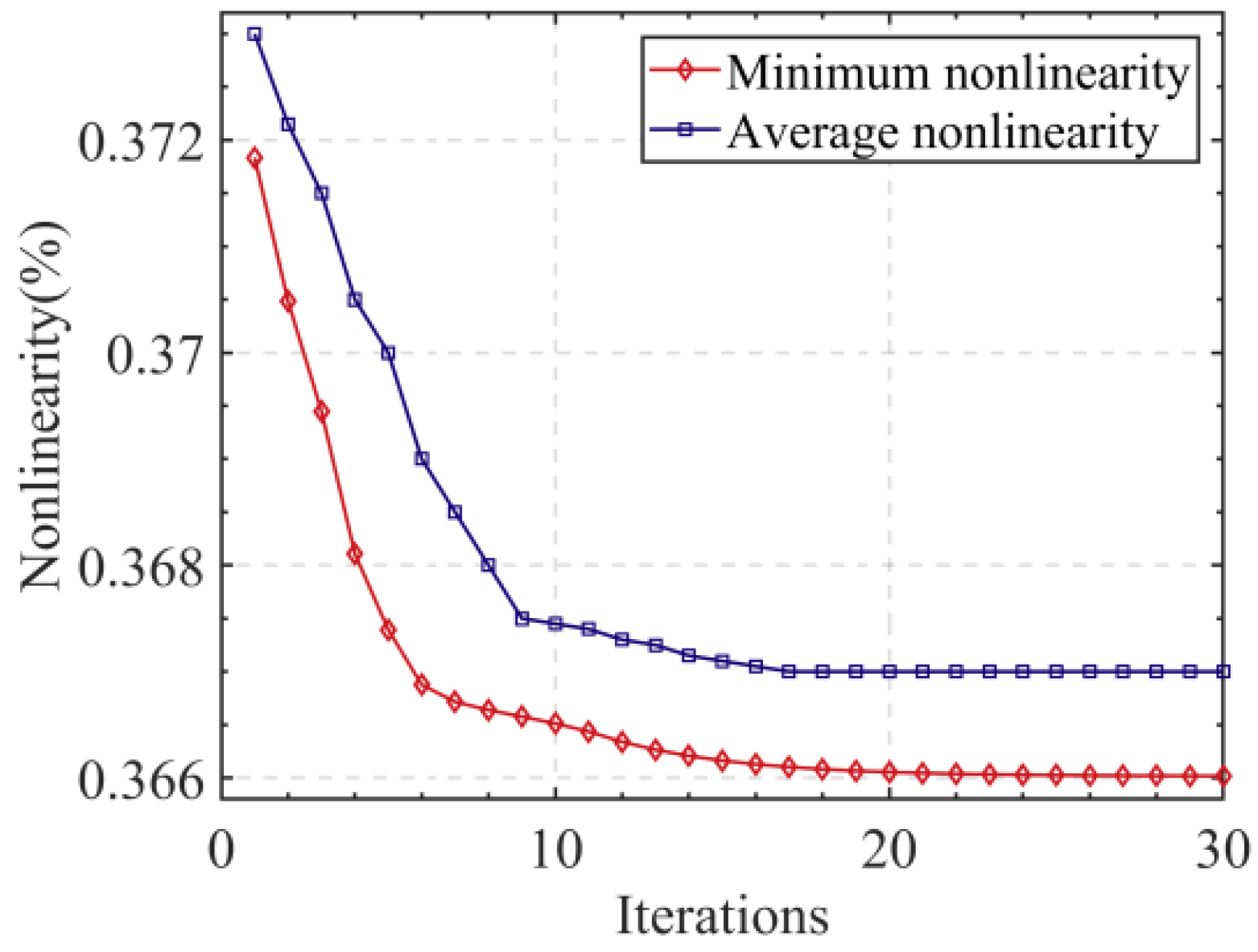
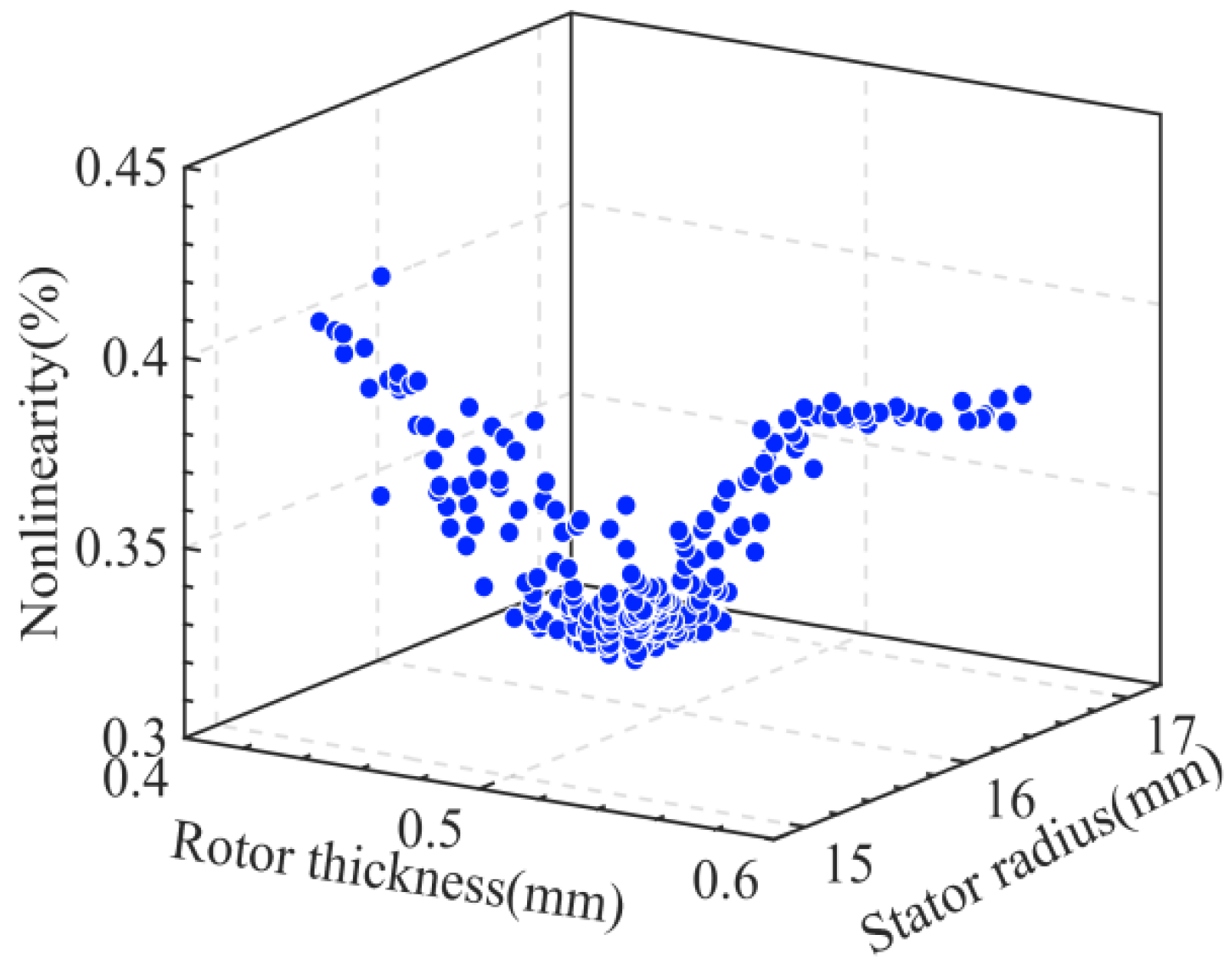
The relationship between the non-linearity and the number of iterations is illustrated in
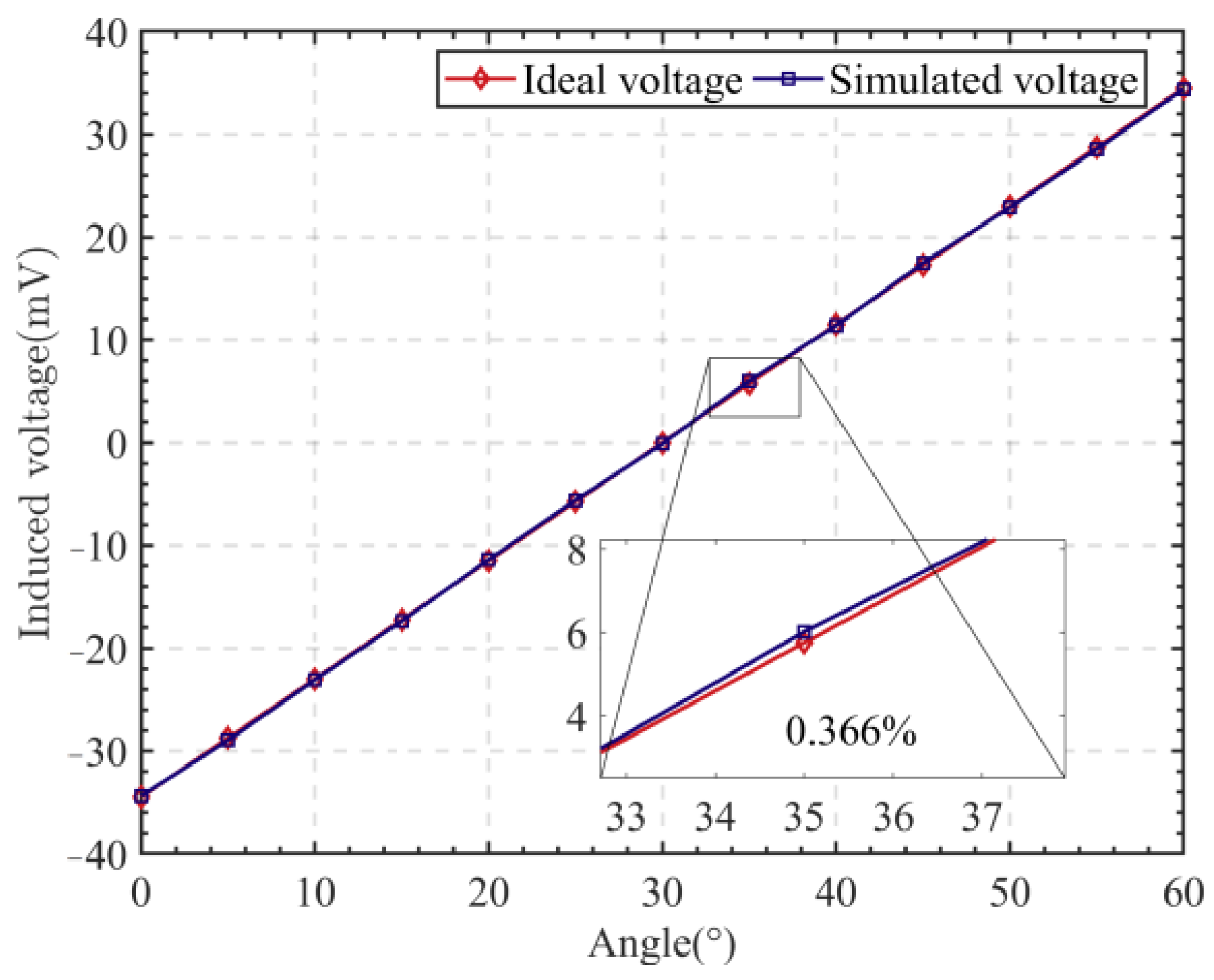
Figure 8, where it can be seen that the non-linearity stabilizes at 0.366% when the number of iterations exceeds 18. Progressively, as shown in
Figure 9, the particle population aggregated at a non-linearity of 0.366%, where the corresponding rotor blade thickness was 0.52 mm and the stator radius was 15.1 mm.
By optimizing the rotor blade thickness and the stator radius, the optimal design parameters of the sensor were obtained, which are shown in
Table 7. The simulation yielded a non-linearity of 0.366% for the vertical non-contact angle sensor, as shown in
Figure 10.
6. Conclusions
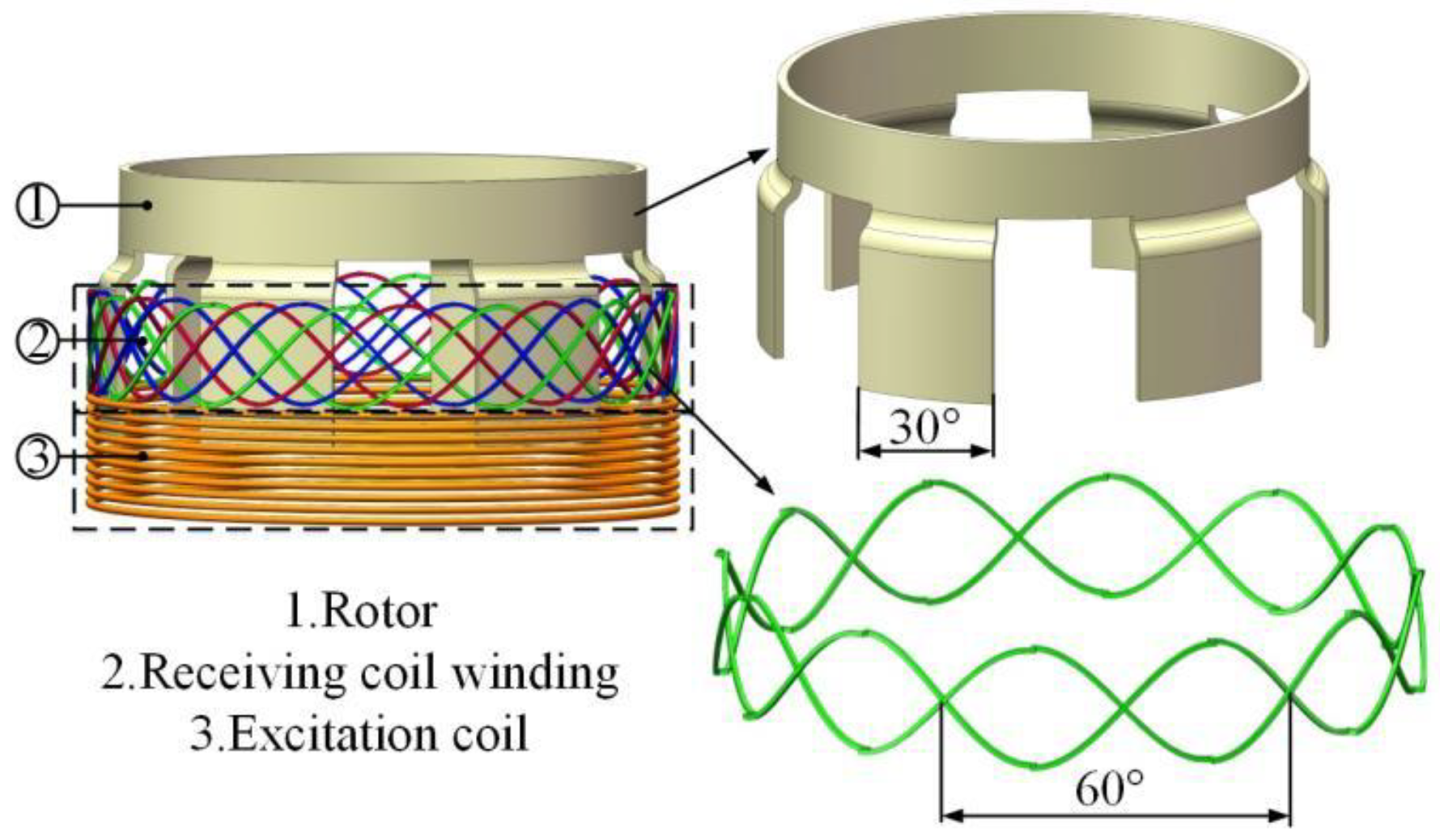
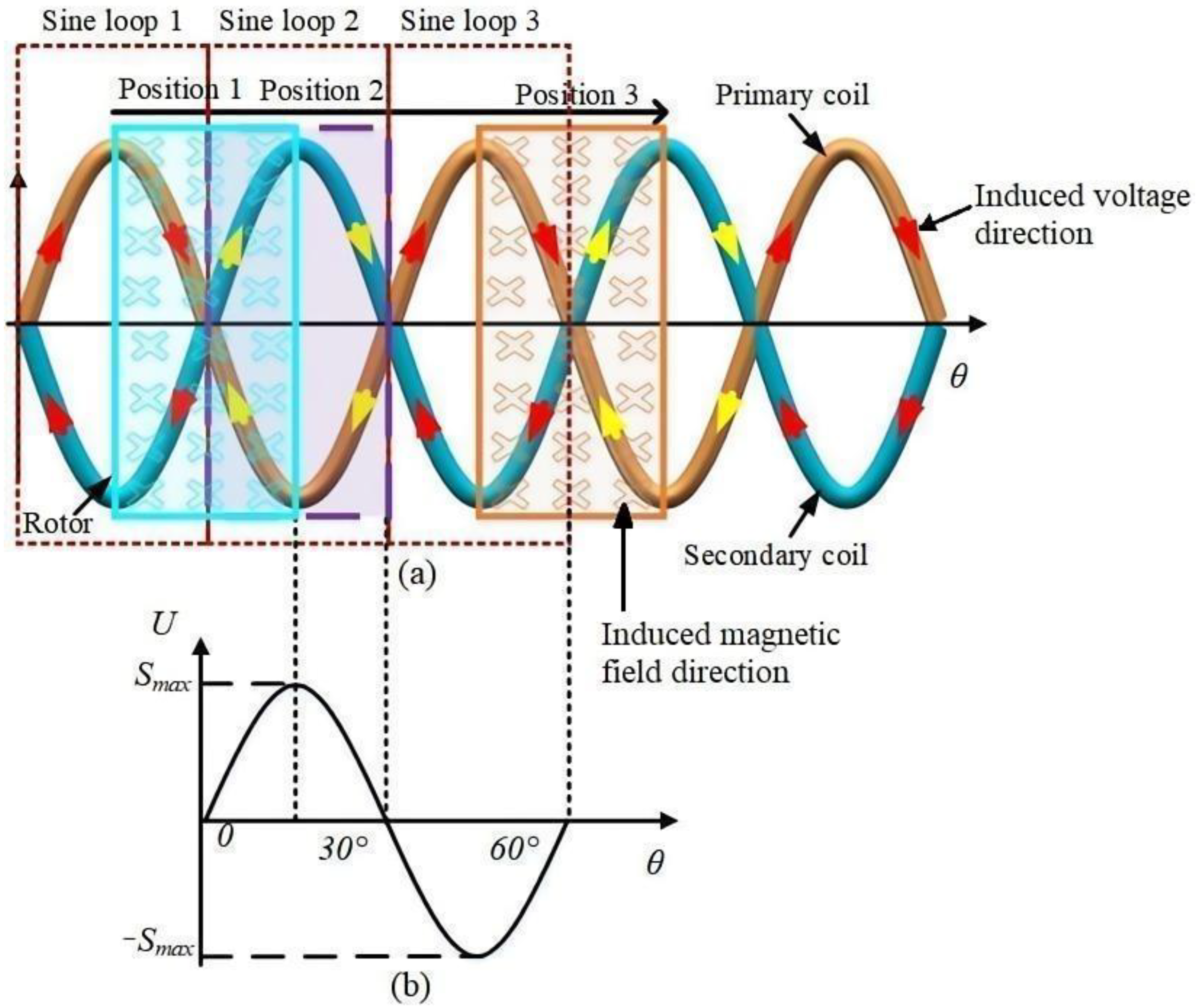
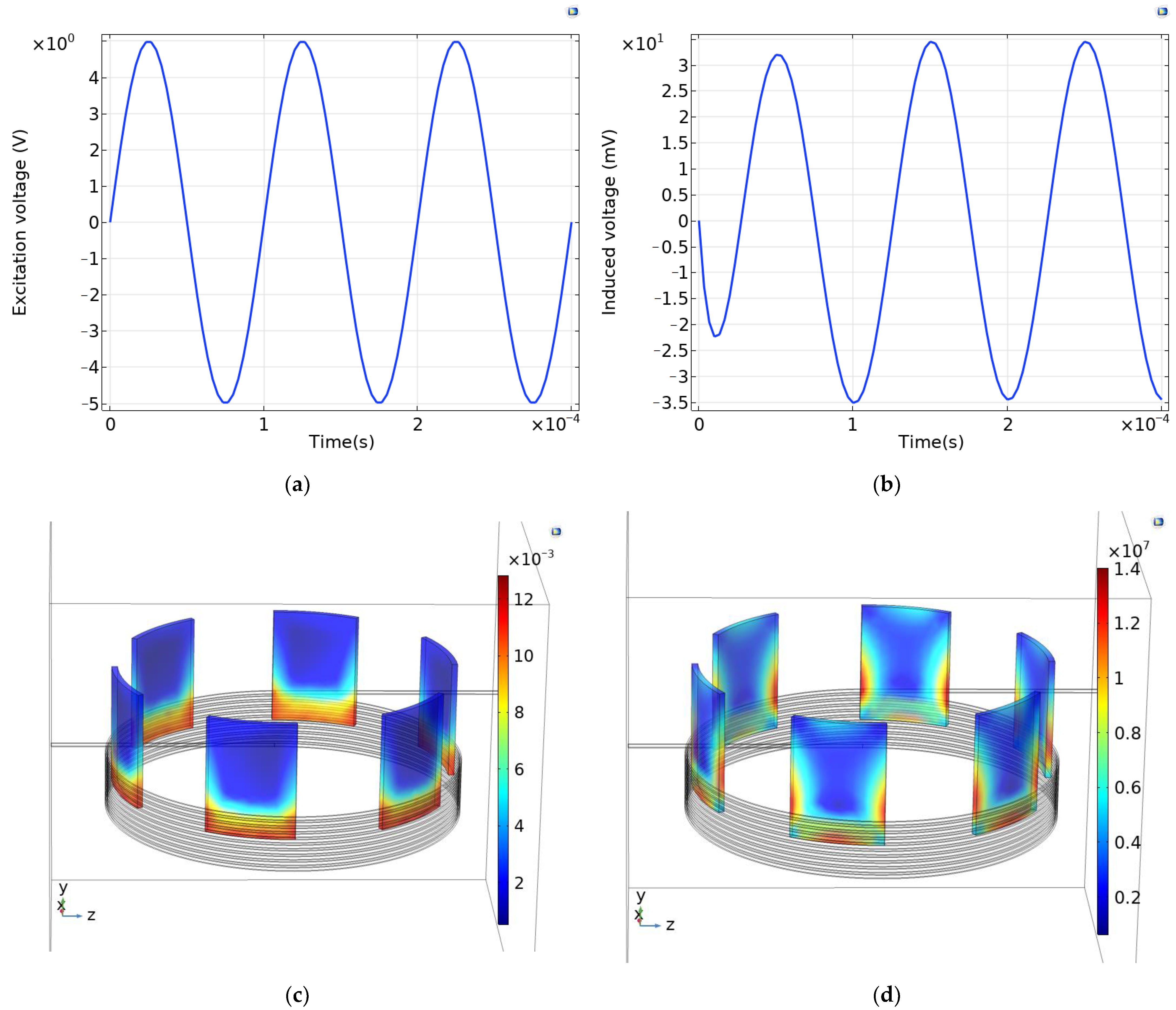
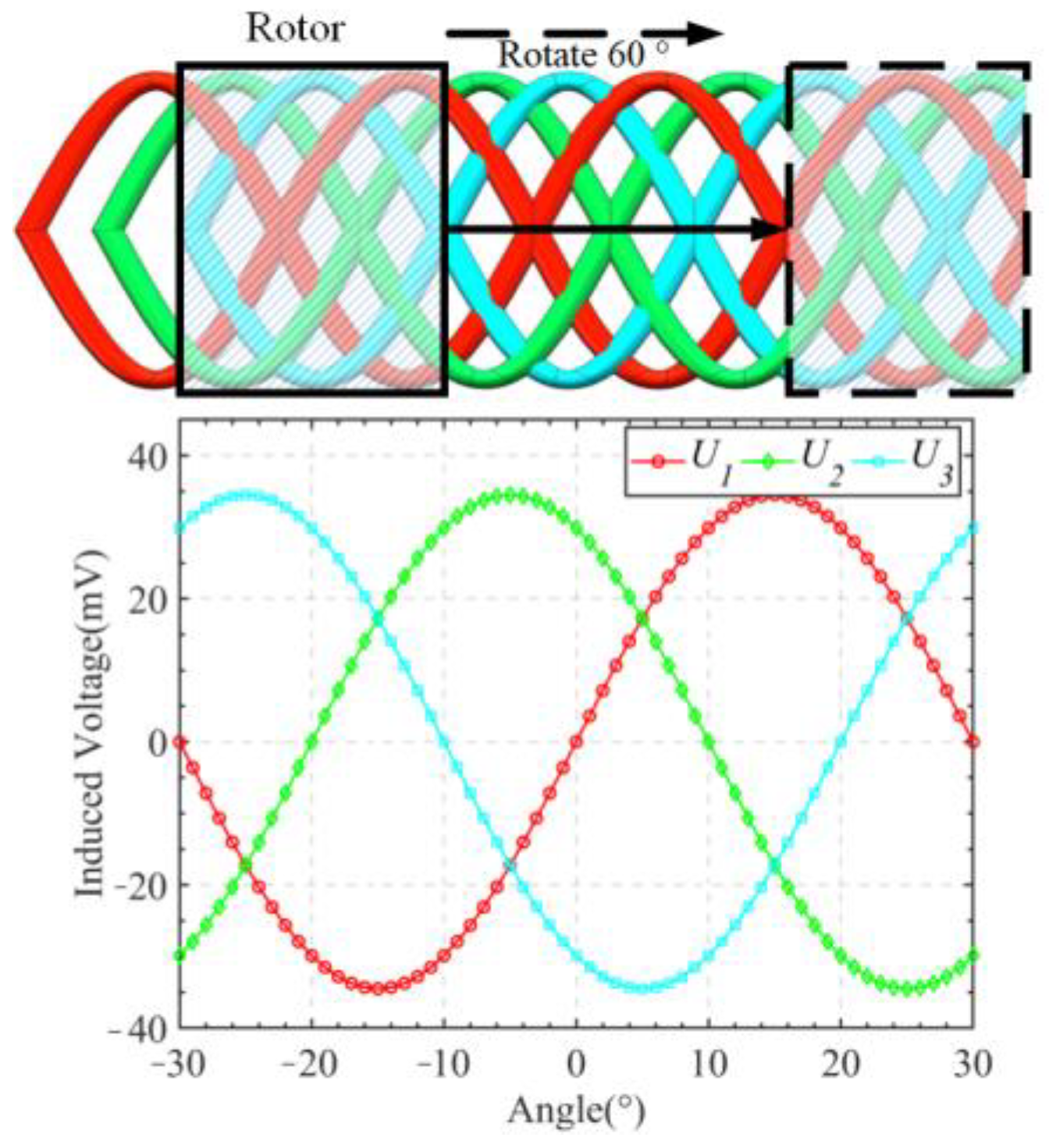
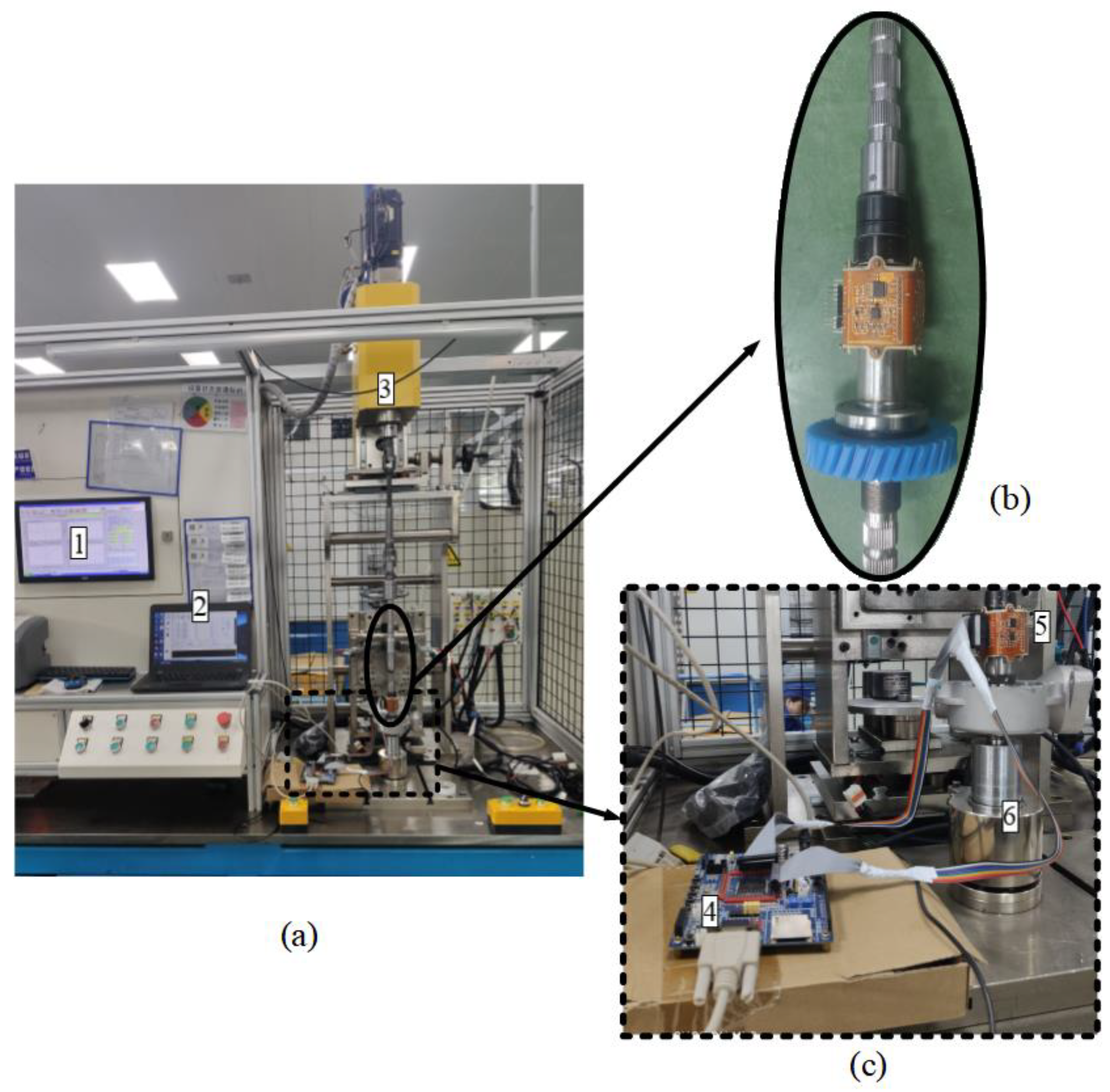
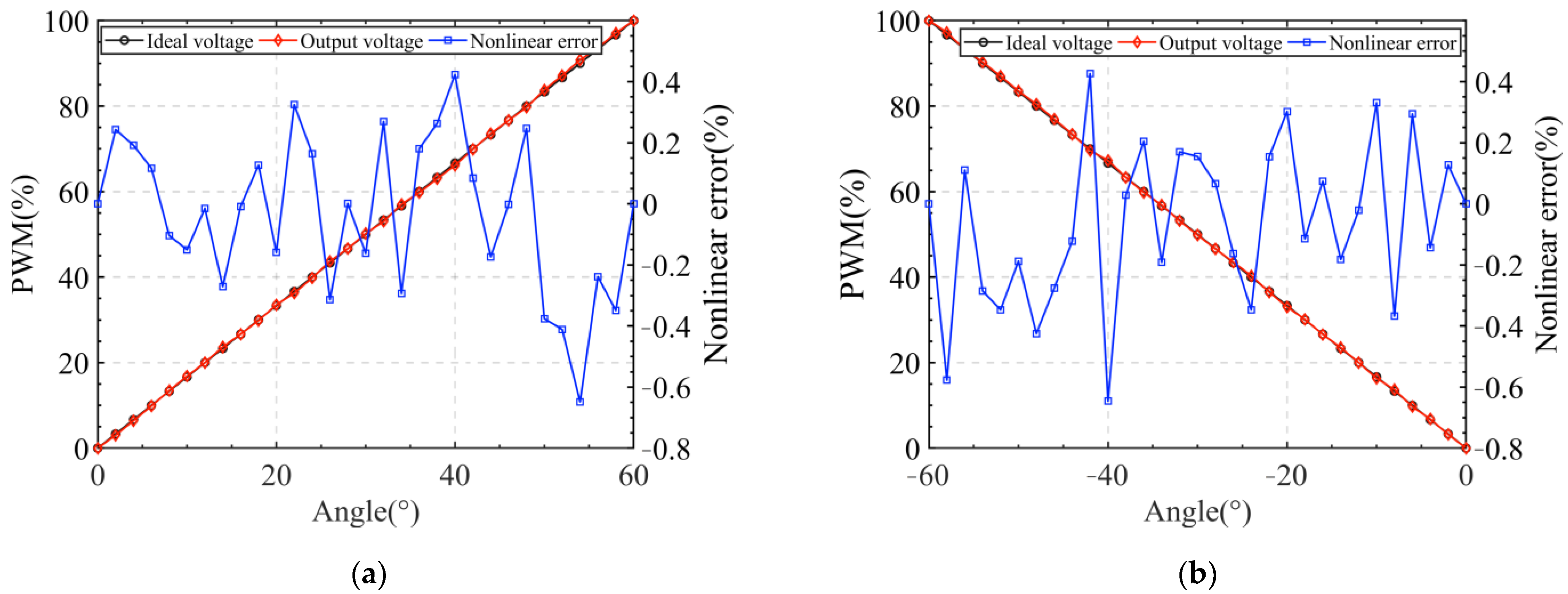
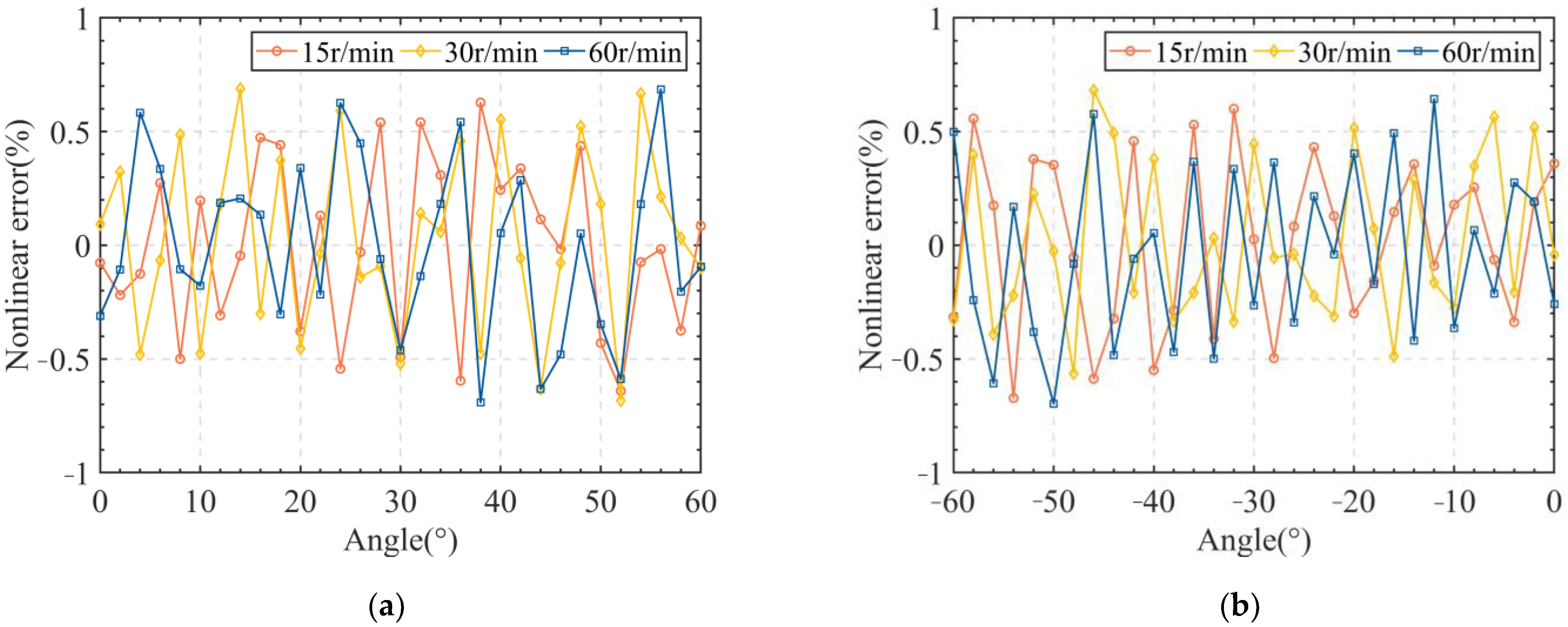
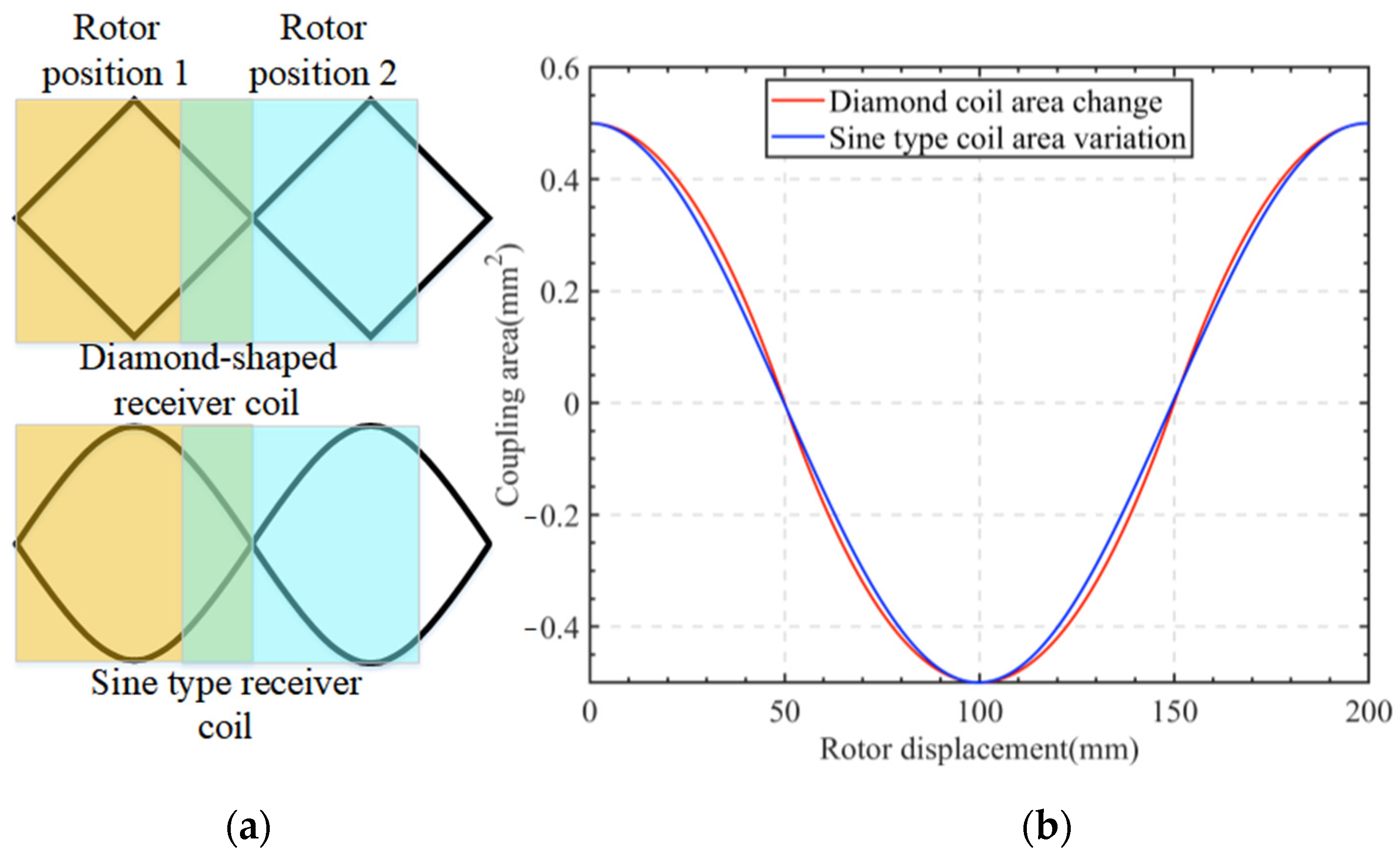
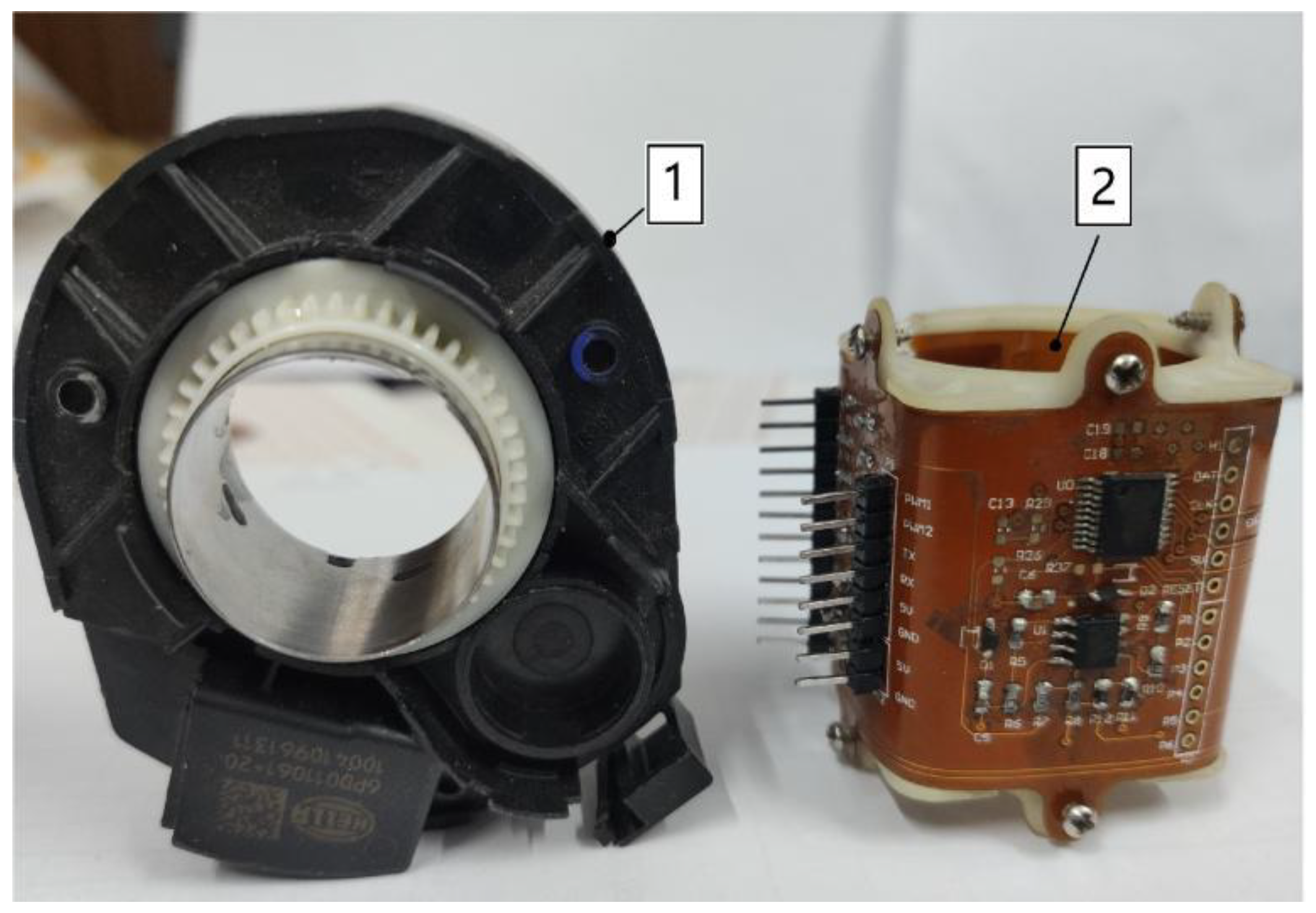
In this paper, a new vertical non-contact induction angle sensor was designed, consisting of a solenoidal excitation coil and three receiver coils that form the stator of the sensor. In addition, a ring-shaped metal sheet with six rectangular blades was utilized to form the rotor of the sensor. Using the principle of differential measurement, the receiver coil was designed to have a sinusoidal structure, and the induced voltages generated by the excitation source in the two adjacent loops of the receiver coil cancelled out each other, which decoupled the excitation field from the eddy current field. In addition, the rotor angle was measured using the change in the coupling area between the rotor and the receiver coil, which improved the sinusoidal fit of the induced voltage. To study the sensor theoretically, a finite element analysis was performed using the COMSOL 6.1 software, where the induced voltage was a sinusoidal signal with frequency of 10 kHz and an amplitude of 34.5 mV. To analyze the non-linearity of the sensor, an algorithm using the CLARK transform method with an inverse tangent function was proposed that linearized the three-phase signal, which in turn reduced the non-linearity compared with the case when the segmented lines were used. The simulation results showed that the non-linearity of proposed sensor was only 0.383%. To reduce the sensor non-linearity, the stator radius and the rotor blade thickness were identified as the key factors affecting the sensor non-linearity, using the Plackett–Burman test. Then, based on the effect values of the stator radius and the rotor blade thickness, an optimization objective function was constructed, following which the PSO algorithm with decreasing inertia weights was used to optimize the sensor non-linearity. The optimization result showed that the sensor non-linearity was minimum at 0.366%, when the rotor thickness was 0.52 mm and the stator radius was 15.1 mm. Besides, the experimental results showed that the non-linearity was 0.648% for the clockwise rotation and 0.646% for the counterclockwise rotation. The proposed vertical non-contact induction angle sensors offer the following advantages: (a) comparative studies with commercially available HELLA sensors show that the sensors in this paper were smaller in size; (b) the magnetic induction intensity of the vertical induction sensor was greater than that of the planar type induction angle sensor; (c) compared with the optical sensors and the HALL sensors, the vertical angle sensors had negligible sensitivity to moisture, dust, oil, etc. The above advantages make the proposed sensor a promising device for automotive and robotics applications.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}