


Adaptive UAV Navigation Method Based on AHRS


Abstract
:1. Introduction
- An AHRS-based novel UAV relative motion model is proposed. The model describes the relative motion using the specific force equation with the UAV attitude output from the AHRS. The model fully takes into account the effect of relative attitude on relative velocity. Therefore, compared with the CA/CV model, this model can improve the overall positioning accuracy of the relative positioning method. In addition, the model uses AHRS as the solution system for the UAV attitude. While ensuring the accuracy of parameter precision, it can realize the correction of attitude error. Compared with the existing relative model, this innovative model reduces the computational complexity of the model for modeling the relative error, while improving the accuracy.
- A TDO-based adaptive filtering method is proposed. The method utilizes the innovation in the EKF process to design the adaptive judgment rule. This method solves the problem of increased error in Kalman filter state estimation due to abrupt changes during relative motion. Meanwhile, the objective function of the optimization algorithm is constructed using multi-sensor conditions such as AHRS, UWB, and GNSS. A new TDO algorithm is also used to correct the estimates that deviate from the true motion state during the filtering process. Finally, the optimization algorithm is combined with the filtering algorithm to form the TDO adaptive filtering algorithm. The algorithm has better convergence and accuracy than traditional optimization algorithms for high-dimensional optimization problems such as UAV positioning.
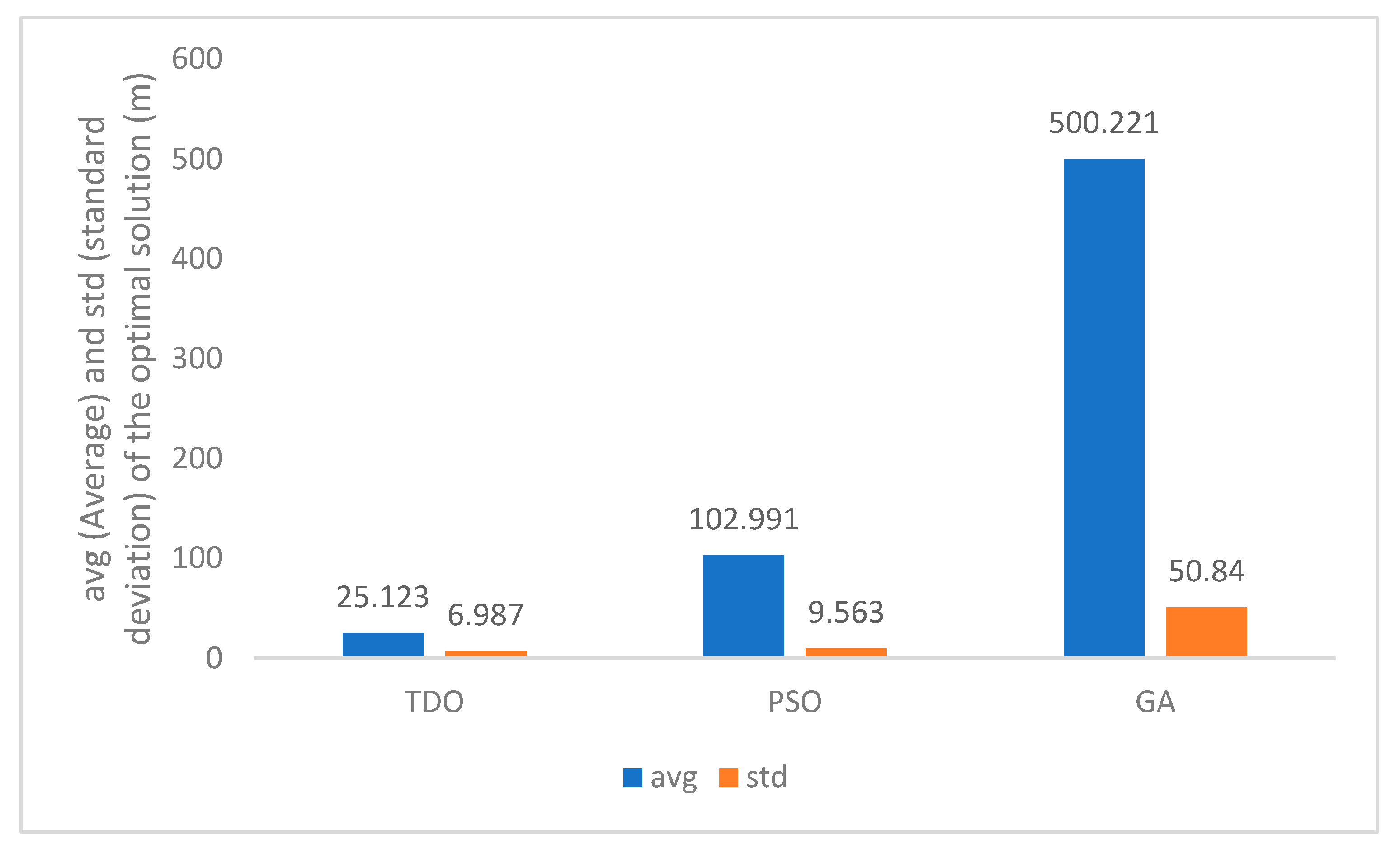
- The performance of the TDO algorithm is compared with other traditional optimization algorithms by performing simulation verification. According to the results, the TDO algorithm has good stability and accuracy when dealing with the problem of UAV scenarios. Meanwhile, by comparing the method proposed in this paper with the traditional relative localization methods, it can be obtained that the new relative localization model can better deal with the relative motion state. Moreover, the TDO adaptive filtering algorithm can improve the accuracy of the method by correcting the deviation from the real motion trajectory.
2. System Model
3. Methods
3.1. Design of Adaptive UAV Navigation Method Based on AHRS
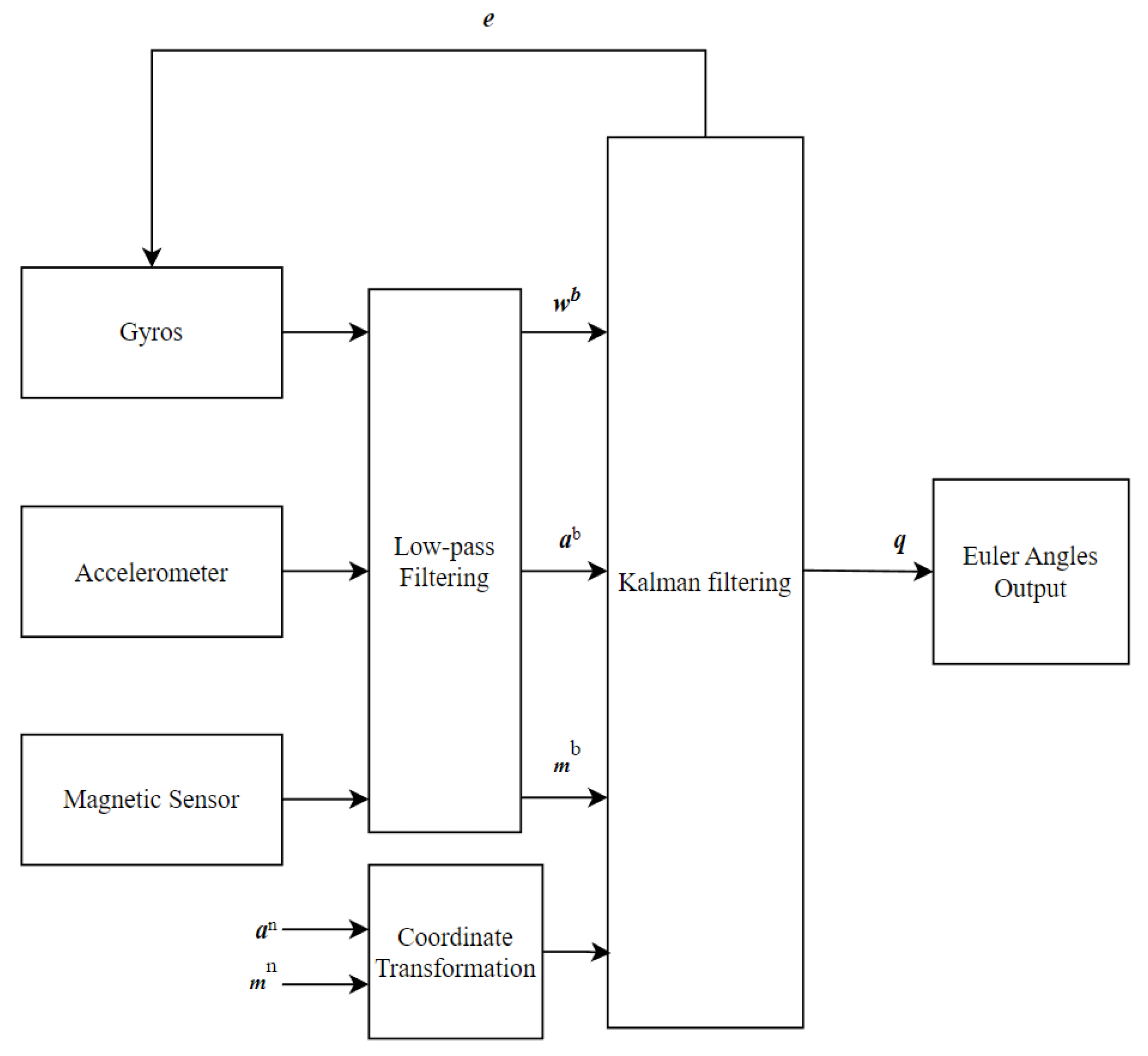
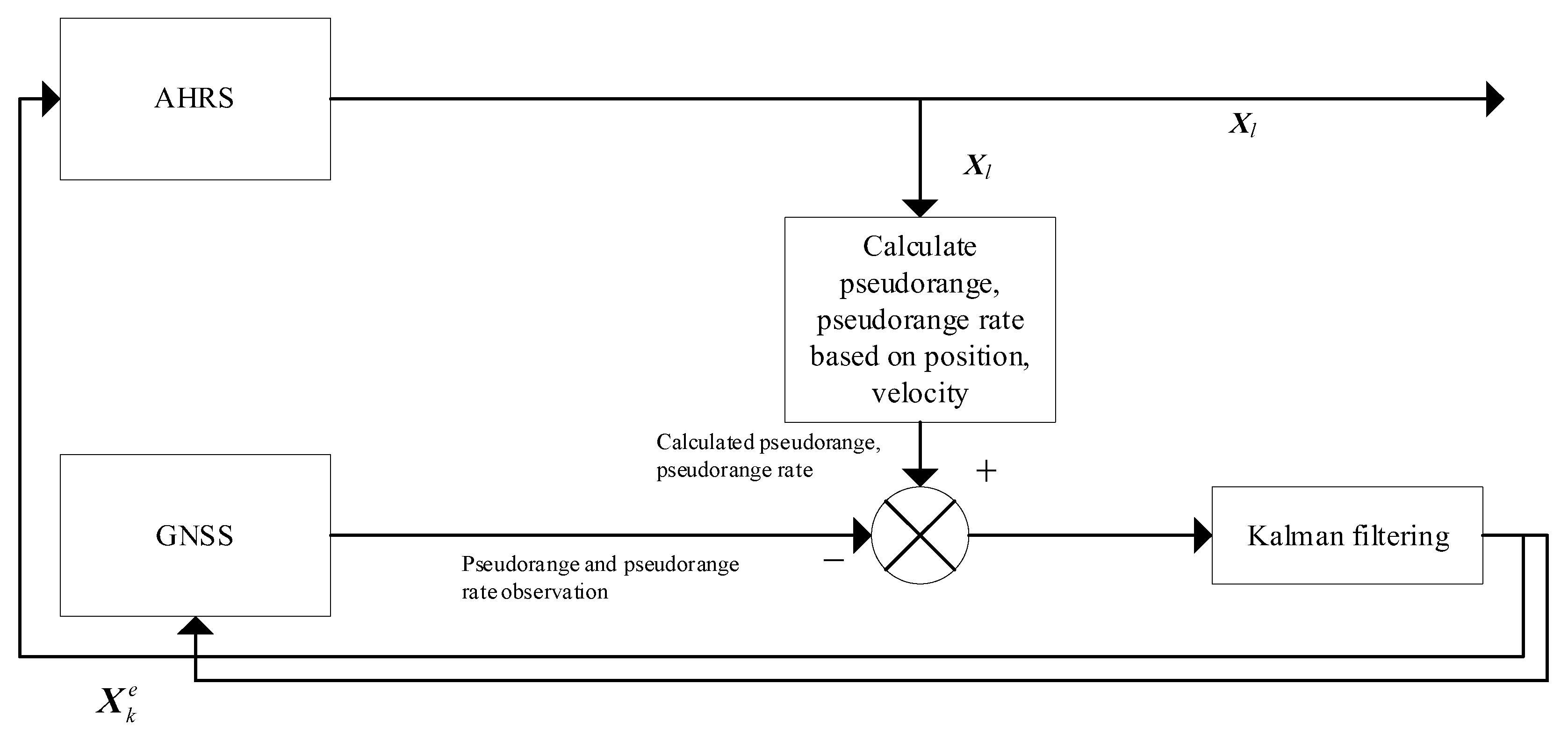
3.1.1. Combined AHRS/GNSS Filtering
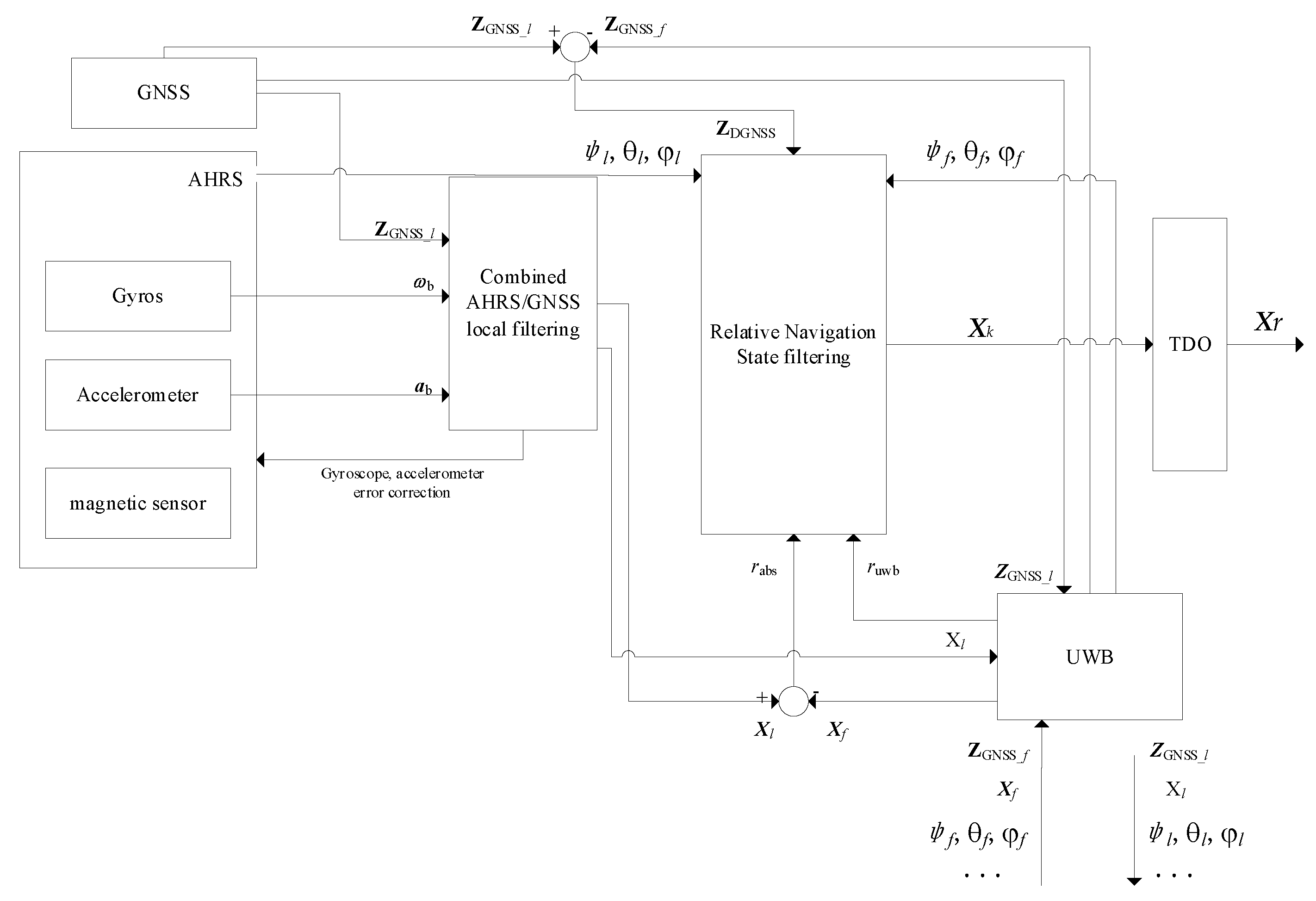
3.1.2. Relative Navigation State Filtering
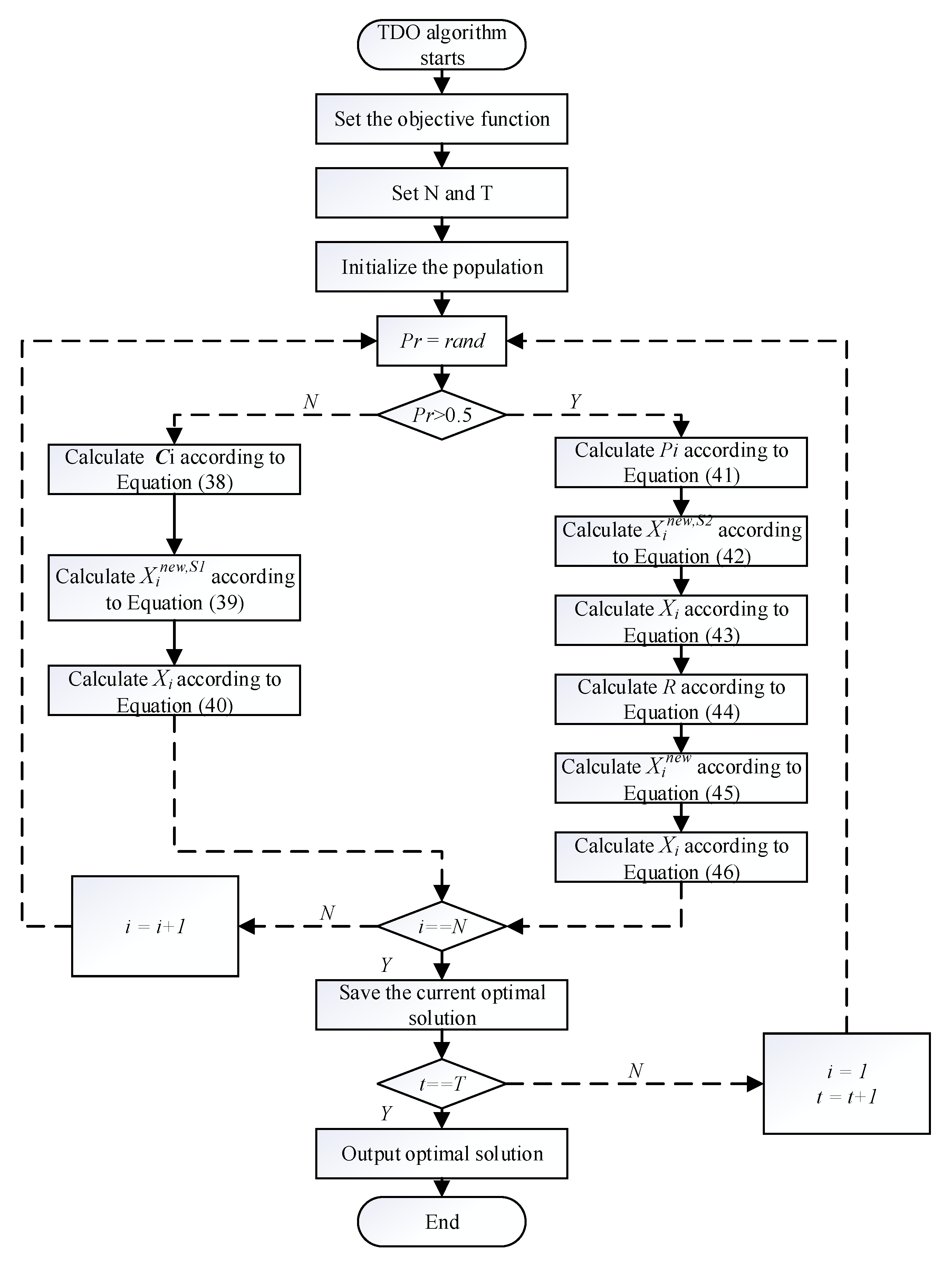
3.2. TDO Algorithm Principle and Flow
3.2.1. Strategy 1: Carrion Eater Strategy
3.2.2. Strategy 2: Predator Strategy
3.3. Adaptive Judgment Rule Design
3.4. Objective Function Setting and Performance Analysis of TDO
3.5. TDO Adaptive Kalman Filtering Algorithm Flow
4. Results
4.1. Simulation Initial Conditions
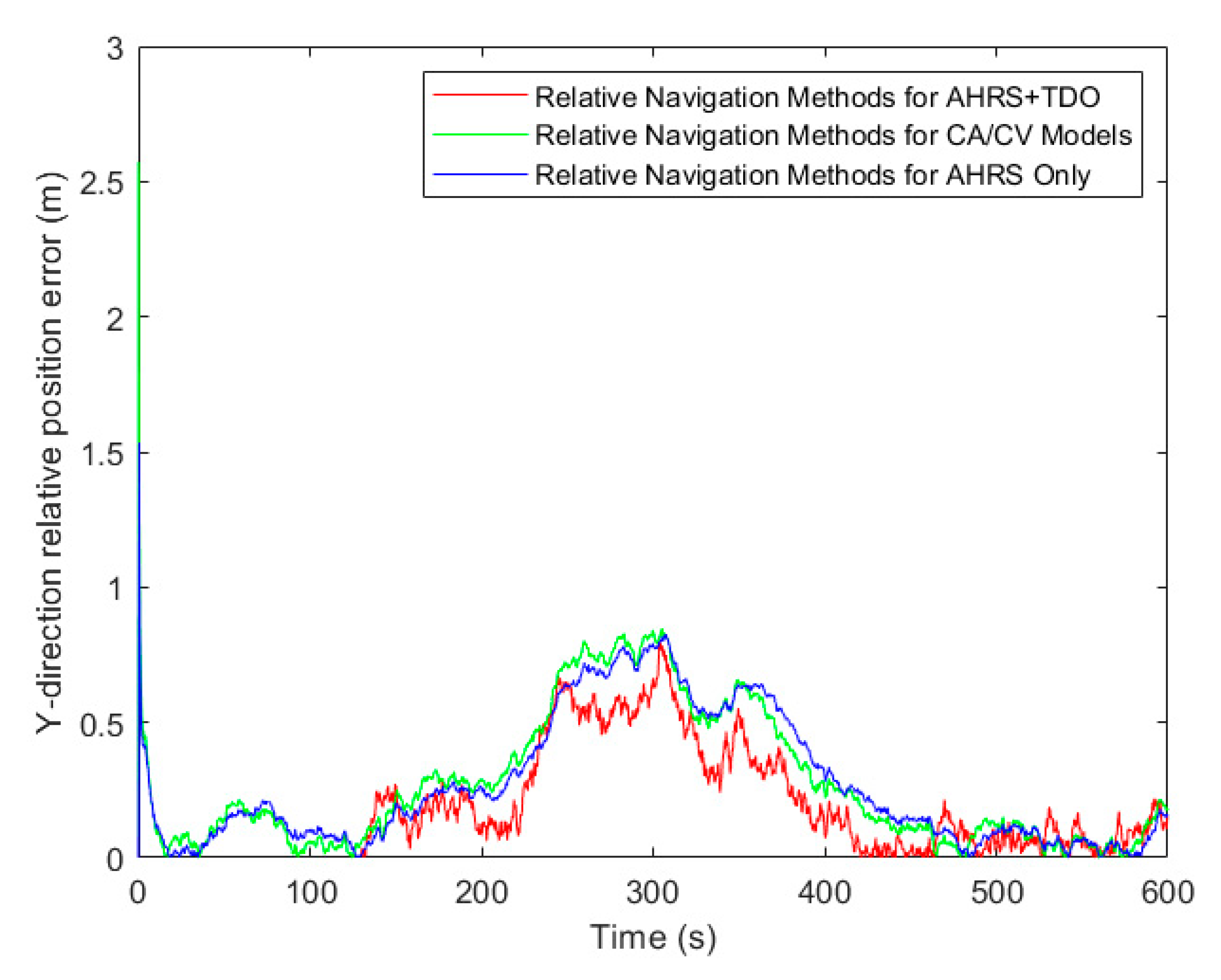
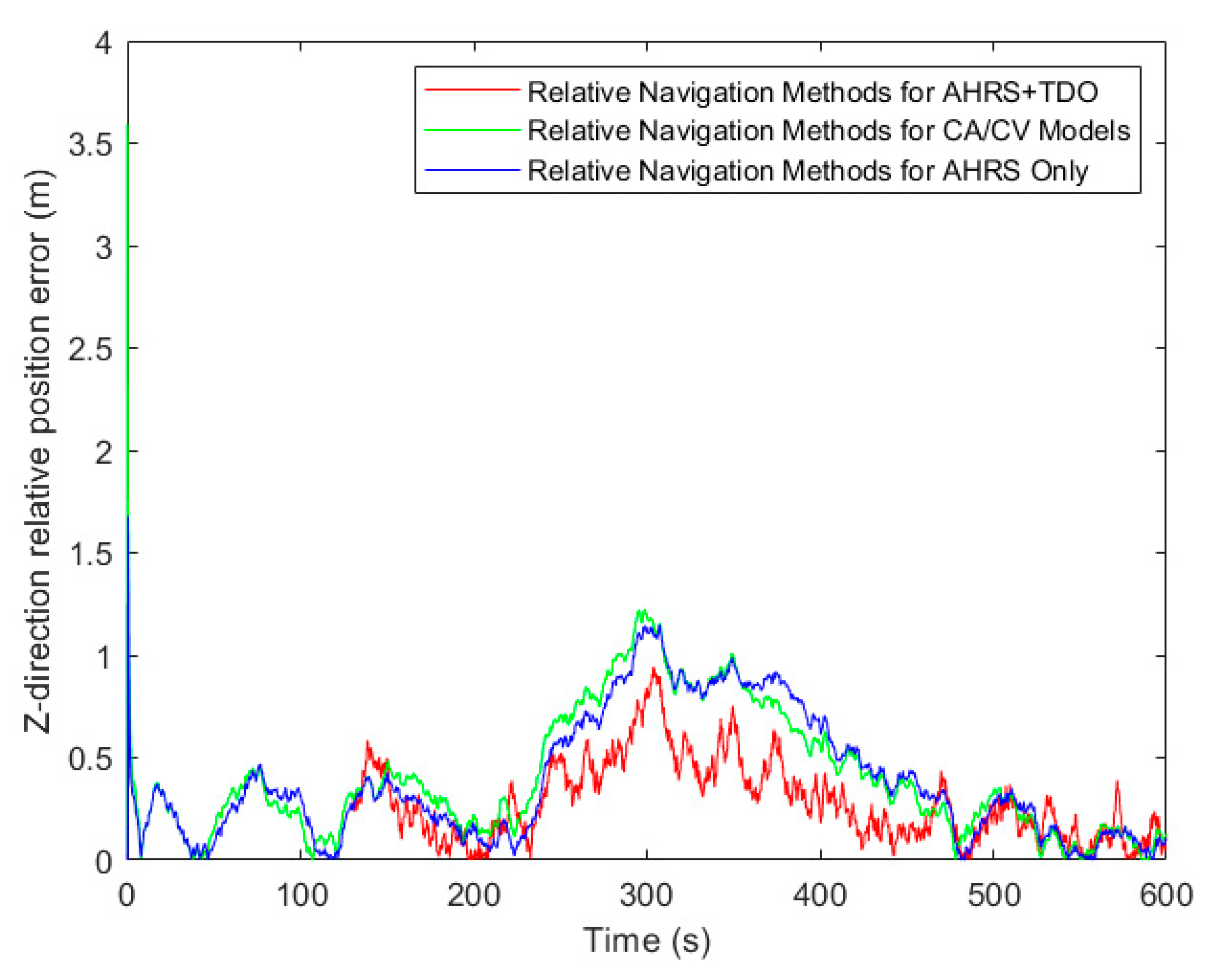
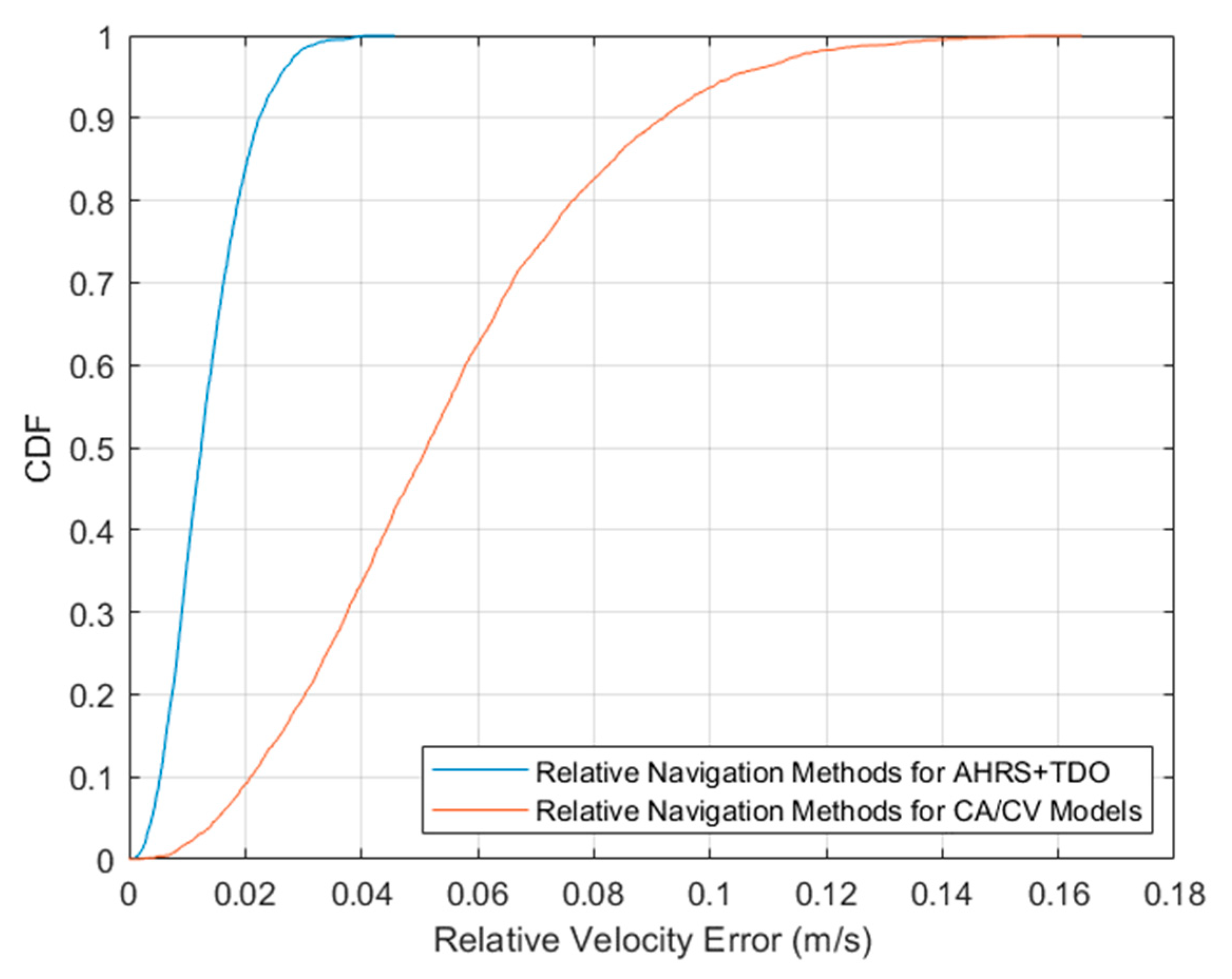
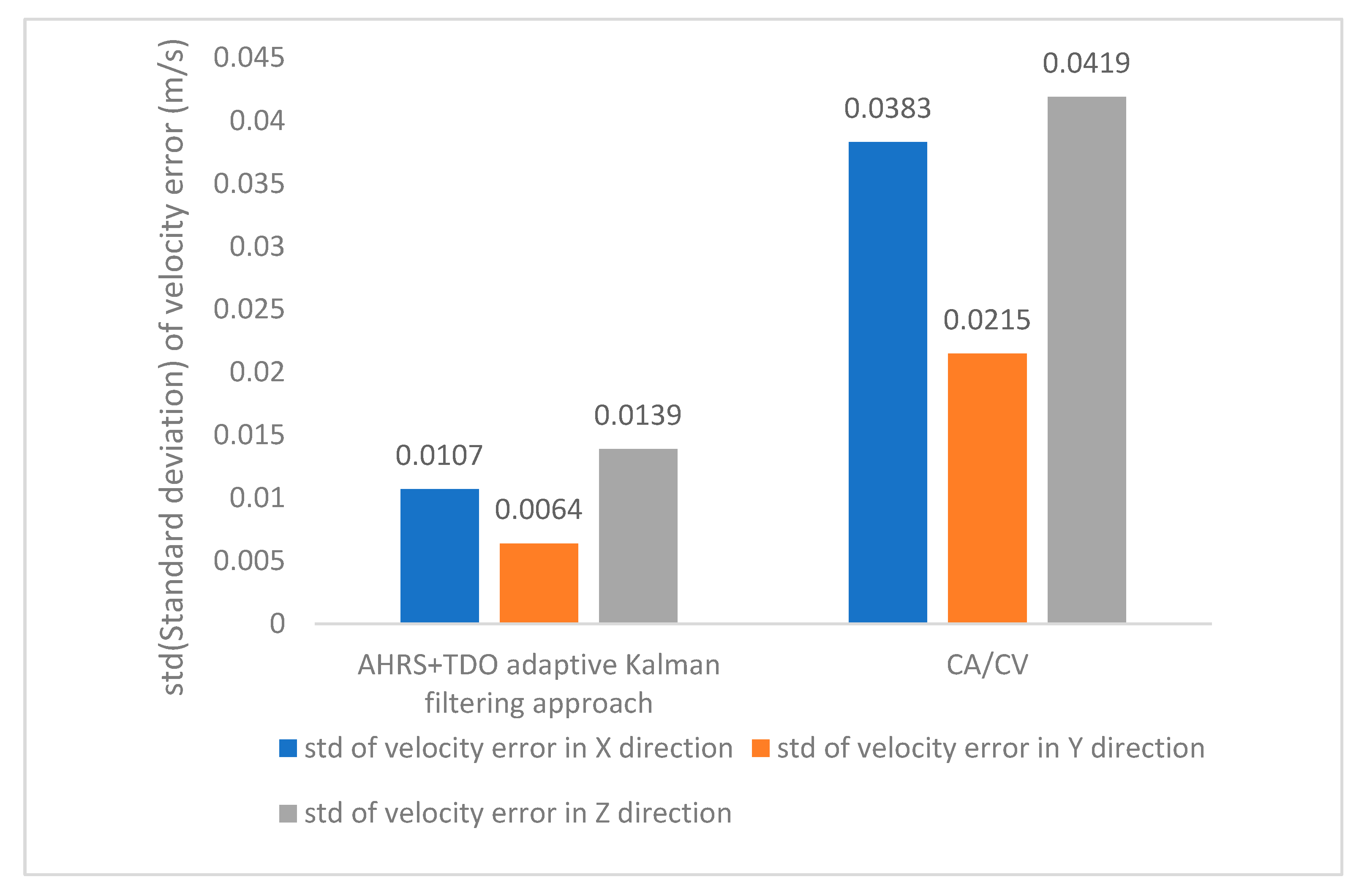
4.2. Simulation Results and Analysis
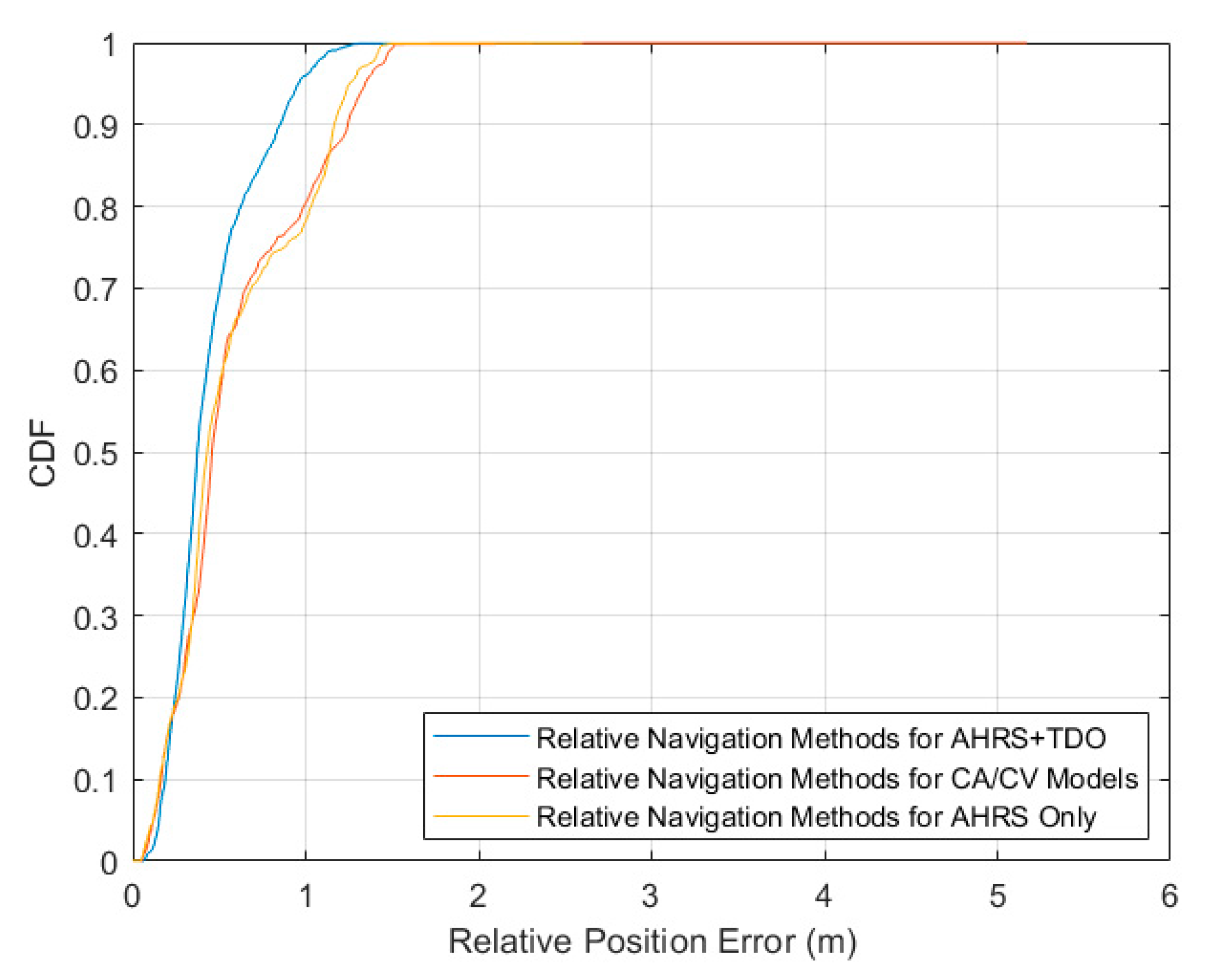
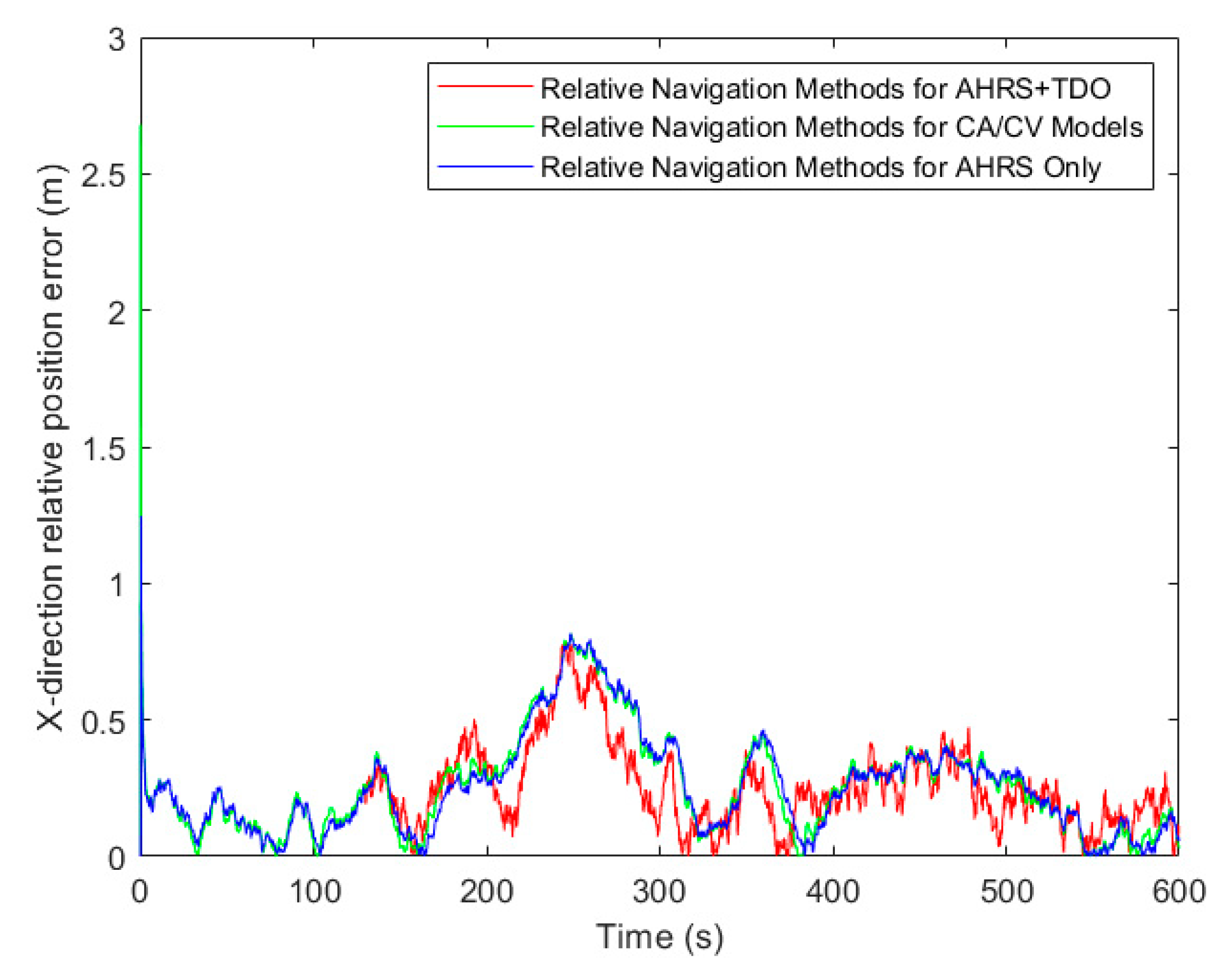
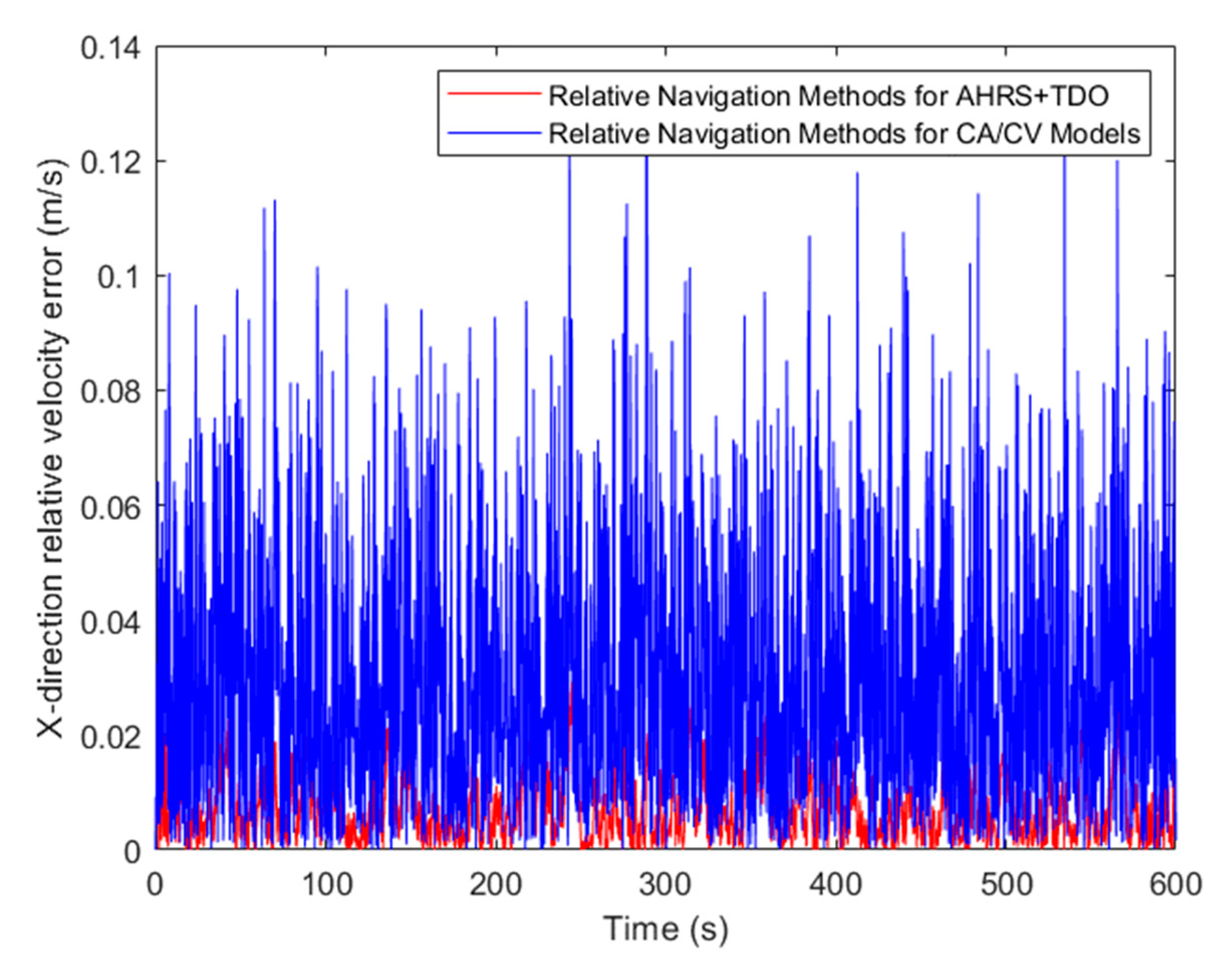
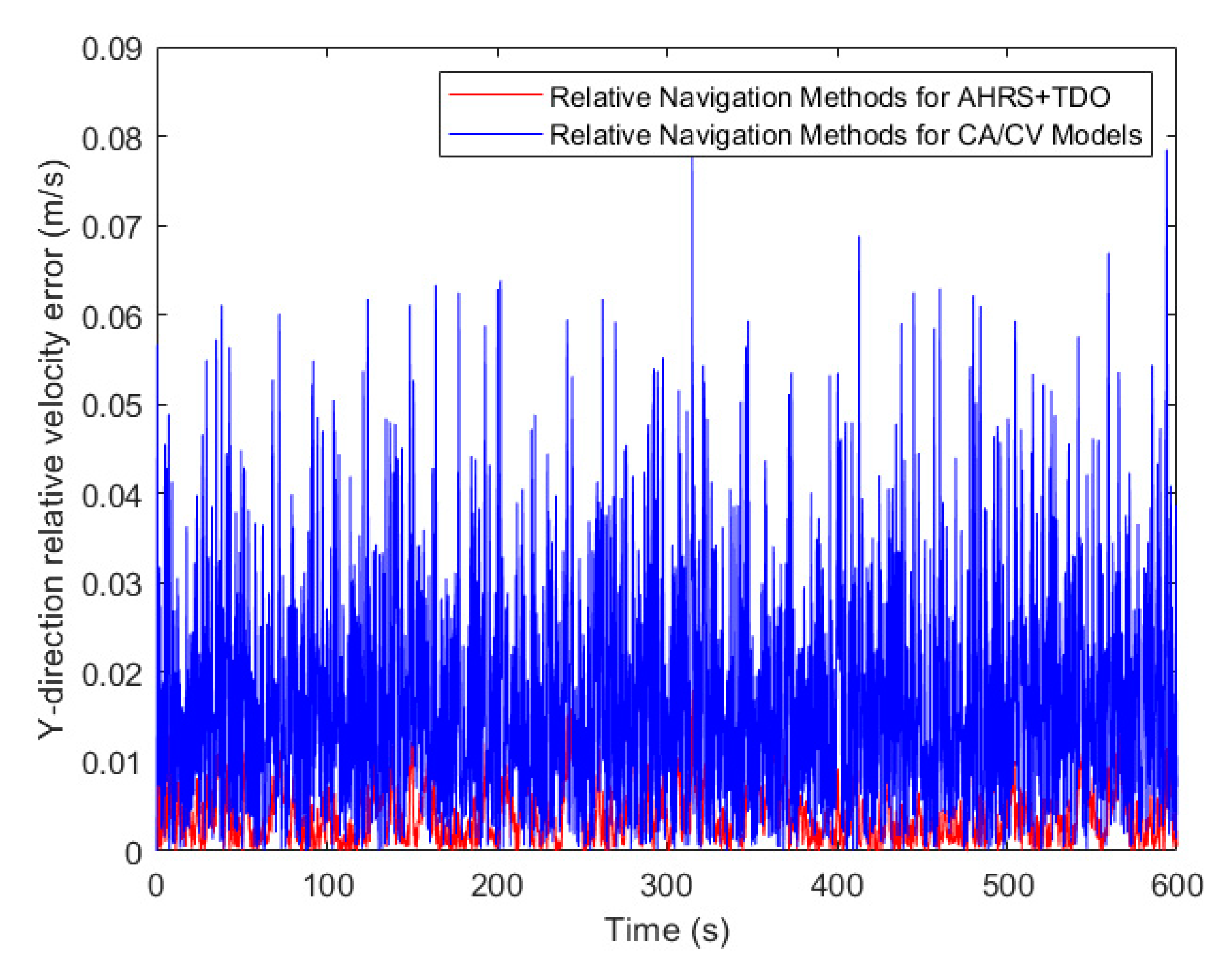
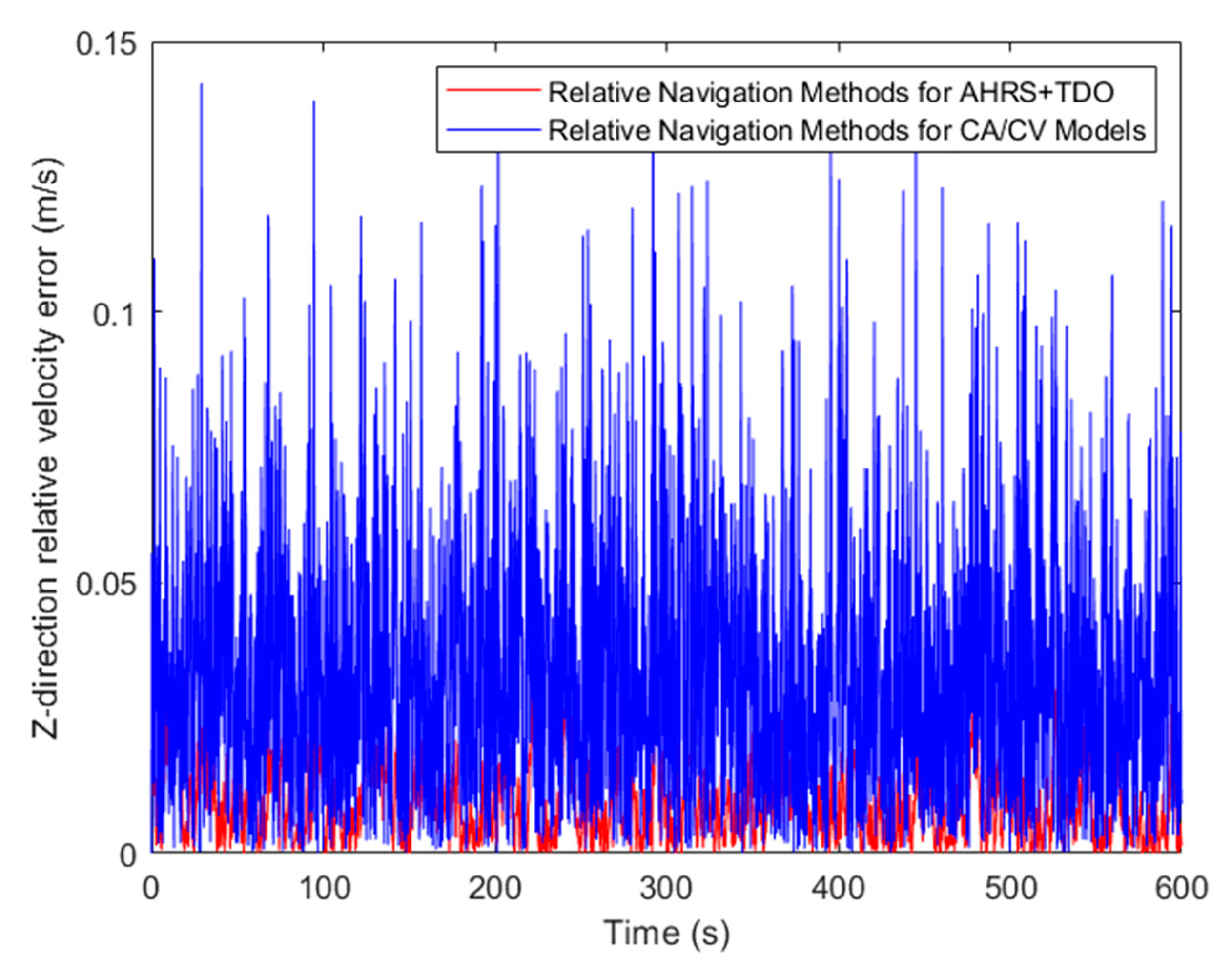
- AHRS+TDO adaptive Kalman filtering method: the method proposed in this paper, using the relative navigation equation of state derived based on AHRS, using UWB, relative differential, and dual positioning differential data as observation data;
- CA/CV equation of state: traditional relative motion equation of state, using observation data consistent with method 1;
- AHRS: only the relative motion equation of state derived based on AHRS is used, using observation data consistent with method 1;
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xiong, J.; Xiong, Z.; Yu, Y. Ultra-wideband ranging-assisted UAV proximity relative navigation method. Chin. J. Inert. Technol. 2018, 26, 346–351. [Google Scholar]
- Fosbury, A.M.; Crassidis, J.L. Relative navigation of air vehicles. J. Guid. Control Dyn. 2008, 31, 824–834. [Google Scholar] [CrossRef]
- Cheng, J.; Ren, P.; Deng, T. A Novel Ranging and IMU-Based Method for Relative Positioning of Two-MAV Formation in GNSS-Denied Environments. Sensors 2023, 23, 4366. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Z.; Jin, Z.; Sun, L.; Zhu, M. Adaptive Sliding Mode Relative Motion Control for Autonomous Carrier Landing of Fixed-Wing Unmanned Aerial Vehicles. IEEE Access 2017, 5, 5556–5565. [Google Scholar] [CrossRef]
- Yu, H.; Zhu, W.P.; Champagne, B. Speech enhancement using a DNN-augmented colored-noise Kalman filter. Speech Commun. 2020, 125, 142–151. [Google Scholar] [CrossRef]
- Jin, K.; Chai, H.Z.; Su, C. Adaptive filtering of fiber optic gyro random noise considering colored noise. J. Surv. Mapp. 2022, 51, 80–89. [Google Scholar]
- Ramezani, A.; Safarinejadian, B.; Zarei, J. Fractional order chaotic cryptography in colored noise environment by using fractional order interpolatory cubature Kalman filter. Trans. Inst. Meas. Control 2019, 41, 3206–3222. [Google Scholar] [CrossRef]
- Liu, C.; Wei, J.; LI, W. Adaptive UKF in colored observation noise for multipath error reduction in BeiDou. J. Electron. Meas. Instrum. 2023, 34, 101–107. [Google Scholar]
- Xu, S.; Lin, X. Robust CKF-based multi-sensor full information fusion algorithm. J. Electr. Mach. Control 2013, 17, 90–97. [Google Scholar]
- Zhou, D.H.; Xi, Y.G.; Zhang, Z.J. A suboptimal multiple fading extended Kalman filter. Acta Autom. Sin. 1991, 17, 689–695. [Google Scholar]
- Sun, Y.; Lu, T.; Chen, Q. An improved volumetric Kalman filter based on strong tracking. J. Huazhong Univ. Sci. Technol. 2013, S1, 451–454. [Google Scholar]
- Li, N.; Zhu, R.; Zhang, Y. A strong tracking square root CKF algorithm based on multiple fading factors for target tracking. In Proceedings of the 2014 Seventh International Joint Conference on Computational Sciences and Optimization, Beijing, China, 4–6 July 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 16–20. [Google Scholar]
- Zhang, A.; Bao, S.; Bi, W.; Yuan, Y. Low-cost adaptive square-root cubature Kalman filter for systems with process model uncertainty. J. Syst. Eng. Electron. 2016, 27, 945–953. [Google Scholar] [CrossRef]
- Zhang, H.; Junwei, X.; Ge, J. Strongly tracked square-root volumetric Kalman filtering algorithm for adaptive CS models. Syst. Eng. Electron. 2019, 41, 9. [Google Scholar]
- Wang, Z.; Liu, Z.; Tian, K.; Zhang, H. Frequency-scanning interferometry for dynamic measurement using adaptive Sage-Husa Kalman filter. Opt. Lasers Eng. 2023, 165, 107545. [Google Scholar] [CrossRef]
- Yuan, G.; Yuan, K.; Zhang, H. A variable proportion adaptive federal kalman filter for INS/ESGM/GPS/DVL integrated nav-igation system. In Proceedings of the Fourth International Joint Conference on Computational Sciences and Optimization, Kunming, China, 15–19 April 2021; IEEE: Piscataway, NJ, USA, 2011; pp. 978–981. [Google Scholar]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman filtering for continuous-discrete systems: Theory and simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Li, C.; Ma, J.; Yang, Y. Low complexity adaptive volumetric Kalman filtering algorithm. J. Beijing Univ. Aero-Naut. Astronaut. 2022, 48, 716–724. [Google Scholar]
- Retscher, G.; Kiss, D.; Gabela, J. Fusion of GNSS Pseudoranges with UWB Ranges Based on Clustering and Weighted Least Squares. Sensors 2023, 23, 3303. [Google Scholar] [CrossRef] [PubMed]
- Song, P.C.; Pan, J.S.; Chu, S.C. A parallel compact cuckoo search algorithm for three-dimensional path planning. Appl. Soft Comput. 2020, 94, 106443. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Fast genetic algorithm path planner for fixed-wing military UAV using GPU. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2105–2117. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. Ind. Inform. 2012, 9, 132–141. [Google Scholar] [CrossRef]
- Fu, Y.; Ding, M.; Zhou, C.; Hu, H. Route planning for unmanned aerial vehicle (UAV) on the sea using hybrid differential evolution and quantum-behaved particle swarm optimization. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 1451–1465. [Google Scholar] [CrossRef]
- Sun, Z.; Wu, J.; Yang, J.; Huang, Y.; Li, C.; Li, D. Path planning for GEO-UAV bistatic SAR using constrained adaptive multiobjective differential evolution. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6444–6457. [Google Scholar] [CrossRef]
- Phung, M.D.; Ha, Q.P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl. Soft Comput. 2021, 107, 107376. [Google Scholar] [CrossRef]
- Shi, D.S.; Tian, F. Three-dimensional deployment and optimization of UAV communication based on multi-objective particle swarm algorithm. J. Nanjing Univ. Posts Telecommun. 2022, 42, 11. [Google Scholar]
- Wu, T.; Bai, R.; Zhu, L. Design of a navigation posture reference system based on Kalman filtering. J. Sens. Technol. 2016, 29, 531–535. [Google Scholar]
- Peng, F.Q.; Wen, Y.; Jin, Q.F. Effects of perturbed gravity on inertial navigation. Surv. Mapp. Sci. Eng. 2014, 34, 6. [Google Scholar]
- Wu, Q.; Wu, R.; Han, F.; Zhang, R. A Three-Stage Accelerometer Self-Calibration Technique for Space-Stable Inertial Navigation Systems. Sensors 2018, 18, 2888. [Google Scholar] [CrossRef] [PubMed]
- Su, X.L.; Wang, H.; Jian, X. Drift stability analysis of platform inertial navigation gyro. Mod. Transp. Technol. Res. 2024, 6, 101–105. [Google Scholar]
- Qin, Y.Y. Kalman Filtering and Combinatorial Navigation Principles; Northwestern Polytechnical University Press: Xi’an, China, 2021. [Google Scholar]
- Dong, M. A low-cost NLOS identification and mitigation method for UWB ranging in static and dynamic environments. IEEE Commun. Lett. 2021, 25, 2420–2424. [Google Scholar] [CrossRef]
- Dehghani, M.; Hubálovský, Š.; Trojovský, P. Tasmanian devil optimization: A new bio-inspired optimization algorithm for solving optimization algorithm. IEEE Access 2022, 10, 19599–19620. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Meaning | Value |
|---|---|---|
| Ns | Number of available satellites | 8 |
| N | Number of TDO stock members | 30 |
| T | Maximum number of TDO iterations | 800 |
| Sensors | Parameters | Value |
|---|---|---|
| Gyros | Constant Drift | 0.1 (°)/h |
| White noise error | 0.1 (°)/h | |
| First-order Markov random noise | 0.1 (°)/h | |
| First-order Markov correlation time | 3600 s | |
| Accelerometer | First-order Markov random noise | 0.01 g |
| First-order Markov correlation time | 0.03 m/s | |
| GPS | Pseudorange error | 3 m |
| Pseudorange rate error | 0.03 m/s | |
| UWB | Ranging noise | 0.15 m |
| Crystal Error Scaling Factor | 1 × 10−3 |
| Relative Position Error | RMSE(m) | ||
|---|---|---|---|
| AHRS+TDO Adaptive Kalman Filtering Approach | AHRS | CA/CV | |
| X-direction | 0.27857 | 0.31351 | 0.31852 |
| Y-direction | 0.28461 | 0.35852 | 0.36996 |
| Z-direction | 0.34116 | 0.49446 | 0.50831 |
| Relative Speed Error | RMSE (m/s) | |
|---|---|---|
| AHRS+TDO Adaptive Kalman Filtering Approach | CA/CV | |
| X-direction | 0.01076 | 0.03826 |
| Y-direction | 0.00644 | 0.02151 |
| Z-direction | 0.01393 | 0.04194 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Li, Z.; Xiong, J.; Lv, K. Adaptive UAV Navigation Method Based on AHRS. Sensors 2024, 24, 2518. https://doi.org/10.3390/s24082518
Lu Y, Li Z, Xiong J, Lv K. Adaptive UAV Navigation Method Based on AHRS. Sensors. 2024; 24(8):2518. https://doi.org/10.3390/s24082518
Chicago/Turabian StyleLu, Yin, Zhipeng Li, Jun Xiong, and Ke Lv. 2024. "Adaptive UAV Navigation Method Based on AHRS" Sensors 24, no. 8: 2518. https://doi.org/10.3390/s24082518