
Development and Application of an IoT-Based System for Soil Water Status Monitoring in a Soil Profile



Abstract
1. Introduction
2. Materials and Methods
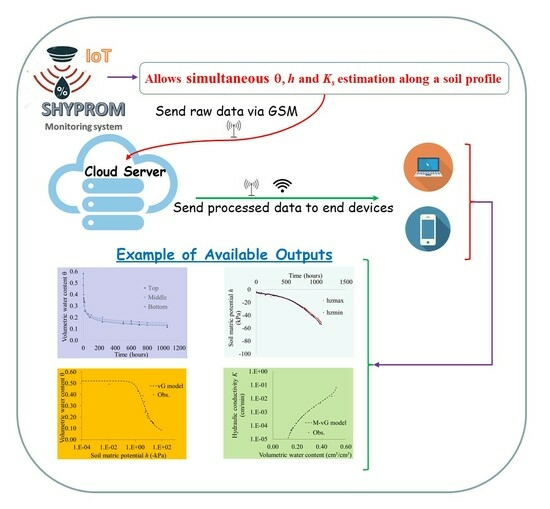
2.1. Conceptual Framework of the Monitoring System
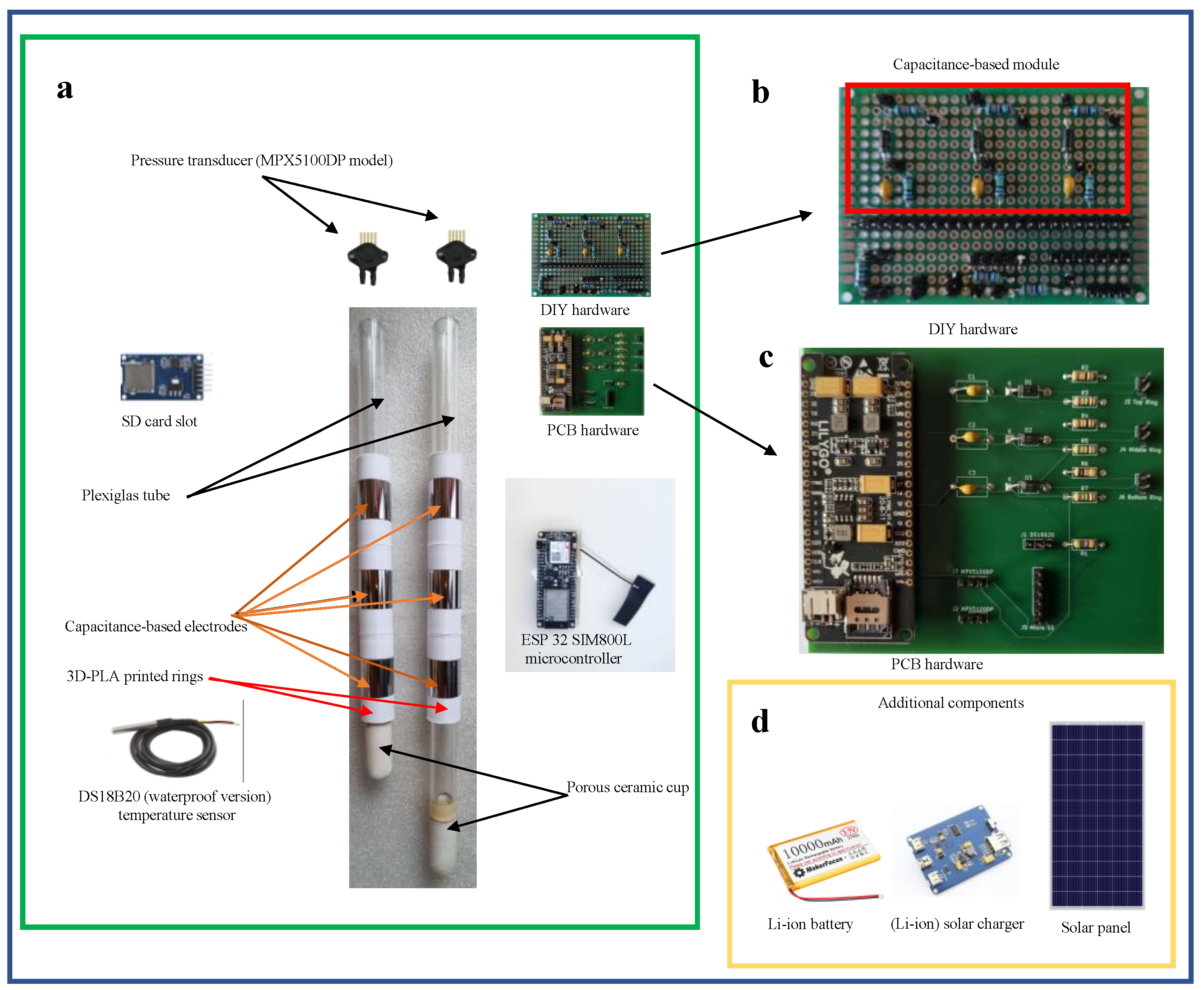
2.2. Development of the IoT-Based Monitoring System
2.3. The Source Code Used to Program the Monitoring System
2.4. Evaluating the Soil K(θ) Function through the Instantaneous Profile Method (IPM) Using SHYPROM
2.5. Soil Characterization
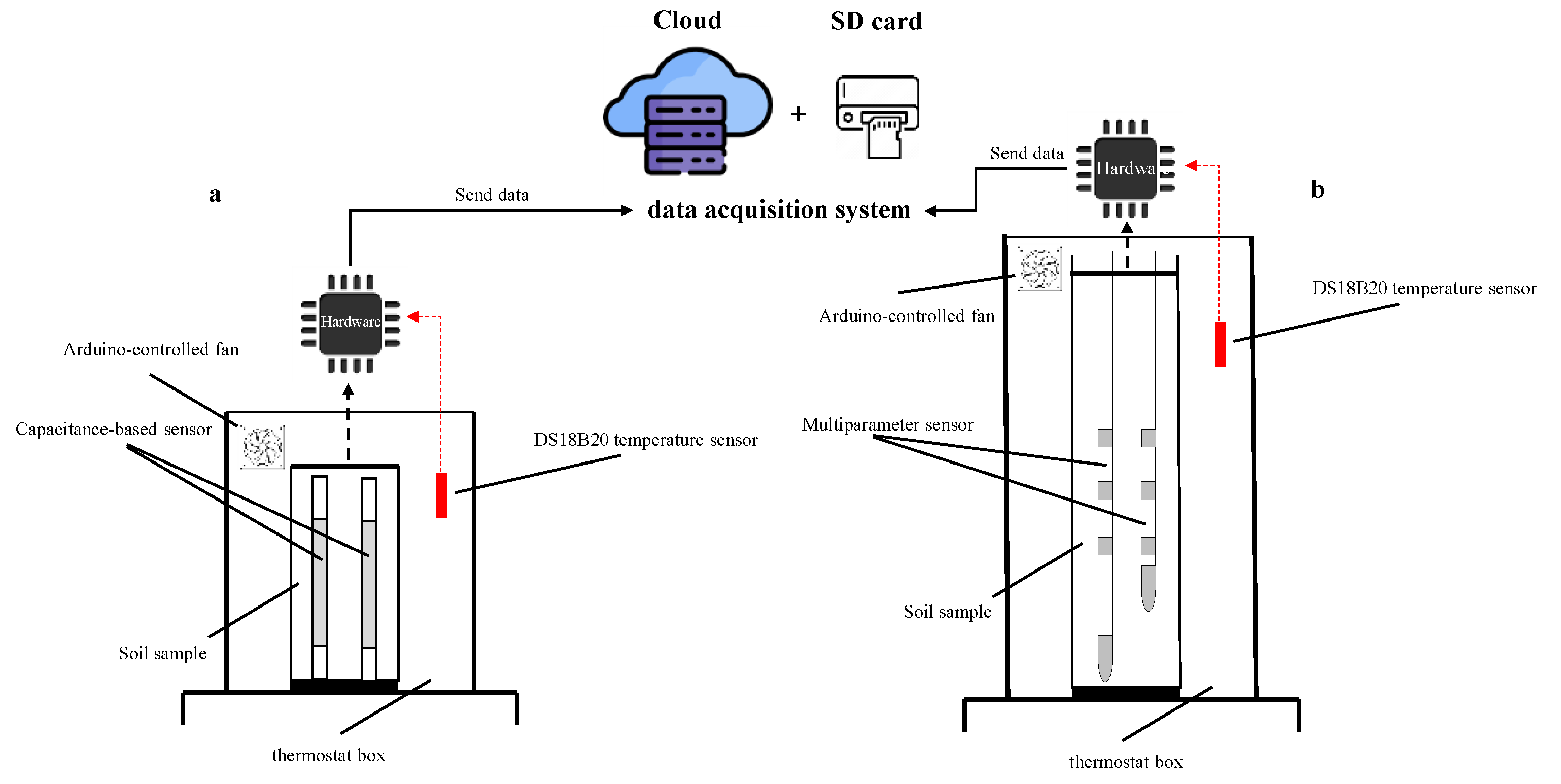
2.6. Laboratory Experiments
2.6.1. Experiment #1: Sensor Calibration and Validation
2.6.2. Experiment #2: Laboratory Testing of the SHYPROM Monitoring System
2.7. Statistical Indices for Sensor Performance Evaluation
3. Results and Discussions
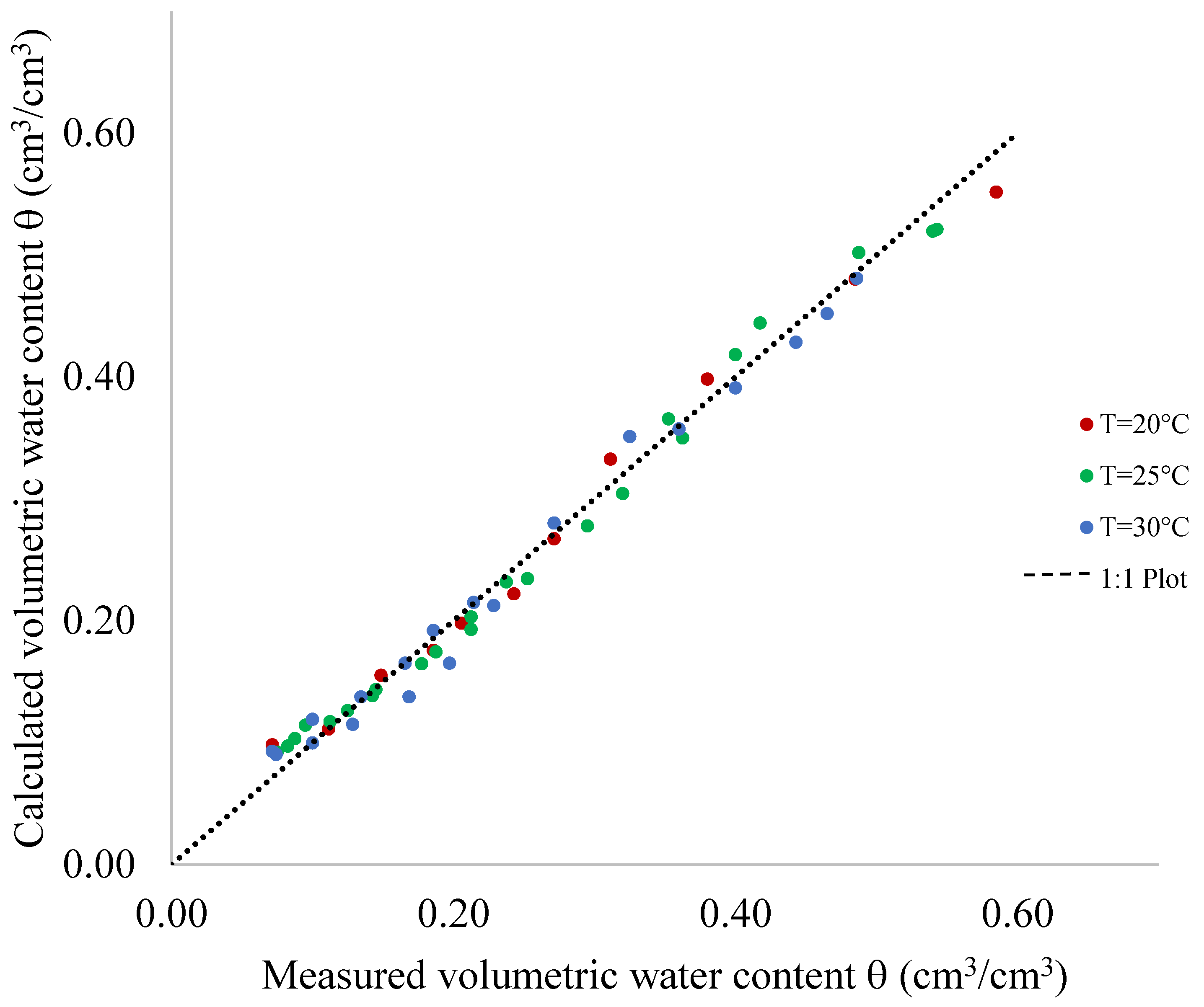
3.1. Calibration and Validation of the Capacitive Sensor
3.2. SHYPROM Laboratory Testing
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
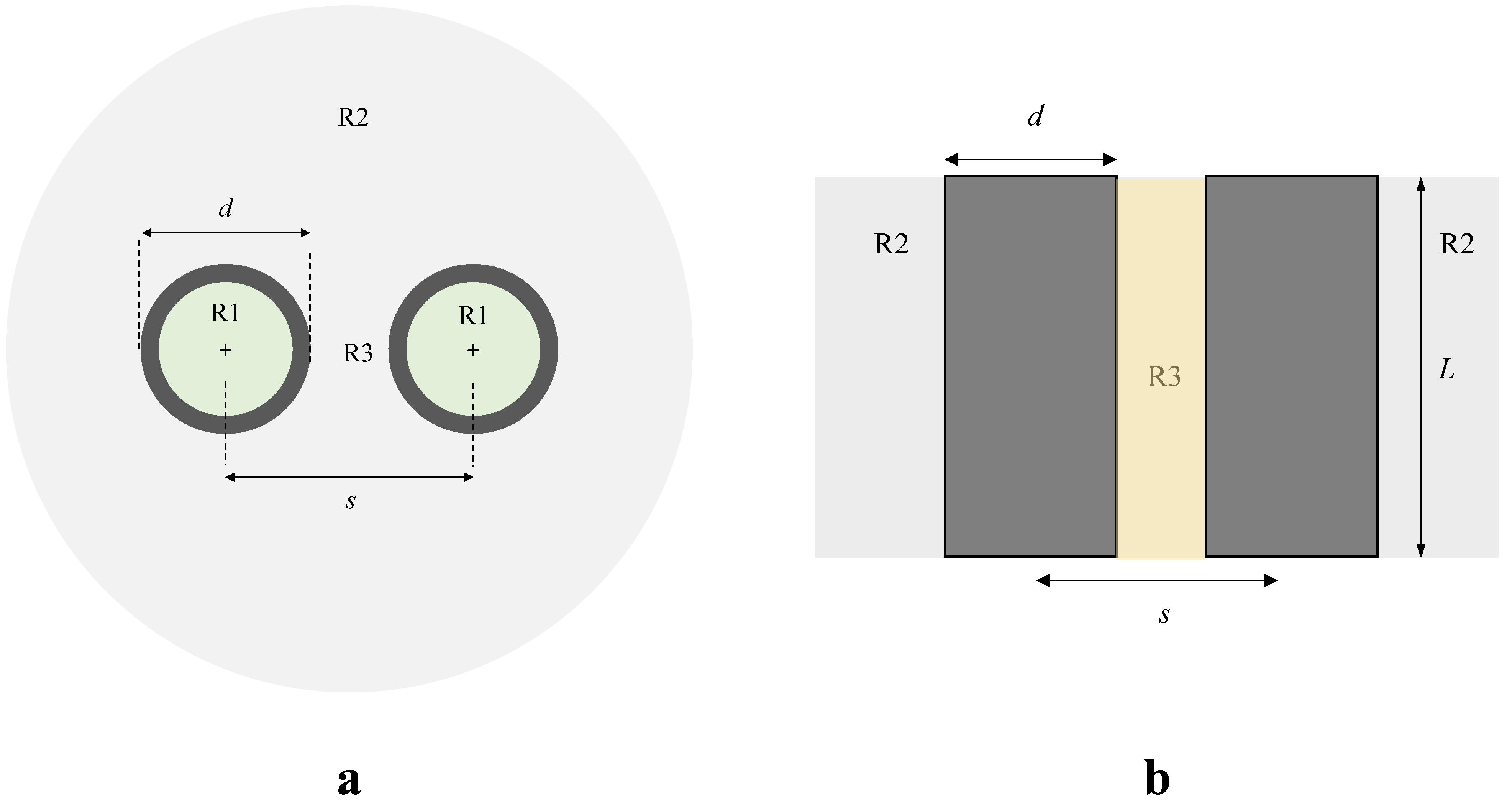
Appendix A. Theoretical and Operational Principles of the Capacitive-Based Module for Volumetric Water Content Estimate

Appendix B. Supplementary Information
- Board Fabrication Files folder:
- (a)
- The Gerber files (SHYPROM.kicad_pcb.zip);
- (b)
- The Centroid file (Centroid_SHYPROM.kicad_pcb.xls);
- (c)
- The Bill of Materials (BoM: SHYPROM_BOM.xls; only electric components).
- 2.
- SHYPROM Firmware folder:
- (a)
- Source code developed in Arduino IDE used to program the proposed monitoring system (SHYPROM.ino);
- (b)
- Source code for the SHYPROM_APP (only for Android-based operating systems devices).
- 3.
- 3D Printing Materials folder:
- (a)
- SHYPROM_BOX Folder: external box (waterproof), .stl files for containing the monitoring system;
- (b)
- SHYPROM_RINGS Folder: .stl files for quick assembling capacitive electrodes on the plexiglass tensiometers;
- (c)
- How to assemble SHYPROM Sensor: Quick tutorial useful for realizing and assembling the SHYPROM monitoring system.
References
- Vachaud, G.; Dane, J.H. Instantaneous profile. In Methods of Soil Analysis, Part 4, Physical Methods; Dane, J.H., Topp, G.C., Eds.; Soil Science Society of America, Inc.: Madison, WI, USA, 2002; pp. 937–945. [Google Scholar]
- Hillel, D. Environmental Soil Physics; Academic Press Inc.: London, UK, 1998; p. 771. [Google Scholar]
- Coppola, A.; Dragonetti, G.; Sengouga, A.; Lamaddalena, N.; Comegna, A.; Basile, A.; Noviello, N.; Nardella, L. Identifying Optimal Irrigation Water Needs at District Scale by Using a Physically Based Agro-Hydrological Model. Water 2019, 11, 841. [Google Scholar] [CrossRef]
- Comegna, A.; Dragonetti, G.; Kodesova, R.; Coppola, A. Impact of olive mill wastewater (OMW) on the soil hydraulic and solute transport properties. Int. J. Environ. Sci. Technol. 2022, 19, 7079–7092. [Google Scholar] [CrossRef]
- Jury, W.A.; Horton, R. Soil Physics; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- González-Teruel, J.D.; Torres-Sánchez, R.; Blaya-Ros, P.J.; Toledo-Moreo, A.B.; Jiménez-Buendía, M.; Soto-Valles, F. Design and Calibration of a Low-Cost SDI-12 Soil Moisture Sensor. Sensors 2019, 19, 491. [Google Scholar] [CrossRef] [PubMed]
- Fares, A.; Abbas, F.; Maria, D.; Mair, A. Improved Calibration Functions of Three Capacitance Probes for the Measurement of Soil Moisture in Tropical Soils. Sensors 2011, 11, 4858–4874. [Google Scholar] [CrossRef] [PubMed]
- Comegna, A.; Coppola, A.; Dragonetti, G.; Severino, G.; Sommella, A.; Basile, A. Dielectric properties of a tilled sandy volcanic vesuvian soil with moderate andic features. Soil Tillage Res. 2013, 133, 93–100. [Google Scholar] [CrossRef]
- Hassan, S.B.M.; Dragonetti, G.; Comegna, A.; Lamaddalena, N.; Coppola, A. Analyzing the role of soil and vegetation spatial variability in modelling hydrological processes for irrigation optimization at large scale. Irrig. Sci. 2023, 42, 249–267. [Google Scholar] [CrossRef]
- Rejeb, A.; Rejeb, K.; Abdollahi, A.; Al-Turjman, F.; Treiblmaier, H. The interplay between the internet of things and agriculture: A bibliometric analysis and research agenda. Internet Things 2022, 19, 100580. [Google Scholar] [CrossRef]
- Huang, C.L.; Ke, Y.X.; Hua, X.D. Application status and prospect of edge computing in smart agriculture. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2022, 38, 224–234. [Google Scholar]
- Misara, R.; Verma, D.; Mishra, N.; Rai, S.K.; Mishra, S. Twenty-two years of precision agriculture: A bibliometric review. Precis. Agric. 2022, 23, 2135–2158. [Google Scholar] [CrossRef]
- Belviso, C.; Satriani, A.; Lovelli, S.; Comegna, A.; Coppola, A.; Dragonetti, G.; Cavalcante, F.; Rivelli, A.R. Impact of Zeolite from Coal Fly Ash on Soil Hydrophysical Properties and Plant 285 Growth. Agriculture 2022, 12, 356. [Google Scholar] [CrossRef]
- Comegna, A.; Belviso, C.; Rivelli, A.R.; Coppola, A.; Dragonetti, G.; Sobhani, A.; Di Prima, S.; Satriani, A.; Cavalcante, F.; Lovelli, S. Analysis of critical water flow and solute transport parameters in different soils mixed with a synthetic zeolite. Catena 2023, 228, 107150. [Google Scholar] [CrossRef]
- Castronuovo, D.; Satriani, A.; Rivelli, A.R.; Comegna, A.; Belviso, C.; Coppola, A.; Di Prima, S.; Cavalcante, F.; Lovelli, S. Effects of Zeolite and Deficit Irrigation on Sweet Pepper Growth. Horticulturae 2023, 9, 1230. [Google Scholar] [CrossRef]
- Bristow, K.L.; Campbell, G.S.; Calissendorff, K. Test of a Heat-Pulse Probe for Measuring Changes in Soil Water Content. Soil Sci. Soc. Am. J. 1993, 57, 930–934. [Google Scholar] [CrossRef]
- Mohamed, A.M.O. Principles and Applications of Time Domain Electrometry in Geoenvironmental Engineering; Developments in Arid Region Research, 5; Taylor and Francis: London, UK, 2006. [Google Scholar]
- Comegna, A.; Coppola, A.; Dragonetti, G.; Sommella, A. Estimating non-aqueous phase liquid (NAPL) content in variable saturated soils using time domain reflectometry (TDR). Vadose Zone J. 2016, 15, 1–11. [Google Scholar] [CrossRef]
- Comegna, A.; Severino, G.; Coppola, A. A review of new TDR applications for measuring non-aqueous phase liquids (NAPLs) in soils. Environ. Adv. 9, 100296. [CrossRef]
- Rowlandson, T.L.; Berg, A.A.; Bullock, P.R.; Ojo, E.R.T.; McNairn, H.; Wiseman, G.; Cosh, M.H. Evaluation of several calibration procedures for a portable soil moisture sensor. J. Hydrol. 2013, 498, 335–344. [Google Scholar] [CrossRef]
- Saeed, I.A.; Wang, M.; Ren, Y.; Shi, Q.; Malik, M.H.; Tao, S.; Cai, Q.; Gao, W. Performance analysis of dielectric soil moisture sensor. Soil Water Res. 2019, 14, 195–199. [Google Scholar] [CrossRef]
- Kapilaratne, R.G.C.; Lu, M. Automated general temperature correction method for dielectric soil moisture sensors. J. Hydrol. 2017, 551, 203–216. [Google Scholar] [CrossRef]
- Payero, J.O.; Qiao, X.; Khalilian, A.; Mirzakhani-Nafchi, A.; Davis, R. Evaluating the Effect of Soil Texture on the Response of Three Types of Sensors Used to Monitor Soil Water Status. J. Water Resour. Prot. 2017, 9, 566–577. [Google Scholar] [CrossRef]
- Oates, M.J.; Fernández-López, A.; Ferrández-Villena, M.; Ruiz-Canales, A. Temperature compensation in a low cost frequency domain (capacitance based) soil moisture sensor. Agric. Water Manag. 2017, 183, 86–93. [Google Scholar] [CrossRef]
- Peddinti, S.R.; Hopmans, J.W.; Abou Najm, M.; Kisekka, I. Assessing Effects of Salinity on the Performance of a Low-Cost Wireless Soil Water Sensor. Sensors 2020, 20, 7041. [Google Scholar] [CrossRef]
- Chowdhury, S.; Sen, S.; Janardhanan, S. Comparative Analysis and Calibration of Low Cost Resistive and Capacitive Soil Moisture Sensor. arXiv 2022, arXiv:2210.03019v1. [Google Scholar]
- Meter Group, Soil Moisture Sensors—How They Work. Why Some Are Not Research-Grade. Online Technical Note. Available online: https://metergroup.com/measurement-insights/soil-moisture-sensors-how-they-work-why-some-are-not-research-grade/ (accessed on 1 January 2024).
- Logsdon, S.; Laird, D. Cation and Water Content Effects on Dipole Rotation Activation Energy of Smectites. Soil Sci. Soc. Am. J. 2004, 68, 1586–1591. [Google Scholar] [CrossRef]
- Robinson, D.A.; Kelleners, T.J.; Cooper, J.D.; Gardner, C.M.K.; Wilson, P.; Lebron, I.; Logsdon, S.D. Evaluation of a capacitance probe frequency response model accounting for bulk electrical conductivity: Comparisons with TDR and network analyzer measurements. Vadose Zone J. 2005, 4, 992–1003. [Google Scholar] [CrossRef]
- Kizito, F.; Campbell, C.S.; Campbell, G.S.; Cobos, D.R.; Teare, B.L.; Carter, B.; Hopmans, J.W. Frequency, electrical conductivity and temperature analysis of low-cost moisture sensor. J. Hydrol. 2008, 352, 367–378. [Google Scholar] [CrossRef]
- Or, D. Who Invented the Tensiometer? Soil Sci. Soc. Am. J. 2001, 65, 1–3. [Google Scholar] [CrossRef]
- Corwin, D.L.; Scudiero, E. Review of soil salinity assessment for agriculture across multiple scales using proximal and/or remote sensors. In Advances in Agronomy; Sparks, D.L., Ed.; Academic Press: Cambridge, MA, USA, 2019. [Google Scholar]
- García, L.; Parra, L.; Jimenez, J.M.; Lloret, J.; Lorenz, P. IoT-Based Smart Irrigation Systems: An Overview on the Recent Trends on Sensors and IoT Systems for Irrigation in Precision Agriculture. Sensors 2020, 20, 1042. [Google Scholar] [CrossRef] [PubMed]
- Briciu-Burghina, C.; Zhou, J.; Ali, M.I.; Regan, F. Demonstrating the potential of a low-cost soil moisture sensor network. Sensors 2022, 22, 987. [Google Scholar] [CrossRef] [PubMed]
- Kuncham, N.V. Sensors for managing water resources in agriculture. J. Electron. Commun. Eng. 2014, 9, 145–163. [Google Scholar] [CrossRef]
- Visconti, P.; de Fazio, R.; Primiceri, P.; Cafagna, D.; Strazzella, S.; Giannoccaro, N.L. A Solar-Powered Fertigation System Based on Low-Cost Wireless Sensor Network Remotely Controlled by Farmer for Irrigation Cycles and Crops Growth Optimization. Intl. J. Electron. Telecommun. 2016, 66, 59–68. [Google Scholar] [CrossRef]
- Visconti, P.; Giannoccaro, N.L.; de Fazio, R.; Cafagna, D.; Strazzella, S. IoT-oriented software platform applied to sensor-based farming facility with smartphone farmer app. Bull. Electr. Eng. Inform. 2020, 9, 1095–1105. [Google Scholar] [CrossRef]
- Sasot, A.S. Study of the Development of an IoT-Based Sensor Platform for E-Agriculture. Master’s Thesis, Department of Engineering Electronics, Universitat Politecnica de Catalunya, Barcelona, Spain, 2020. [Google Scholar]
- Rafique, W.; Qi, L.; Yaqoob, I.; Imran, M.; Rasool, R.U.; Dou, W. Complementing IoT services through software defined networking and edge computing: A comprehensive survey. IEEE Commun. Surv. Tutor. 2020, 22, 1761–1804. [Google Scholar] [CrossRef]
- Balivada, S.; Grant, G.; Zhang, X.; Ghosh, M.; Guha, S.; Matamala, R. A Wireless Underground Sensor Network Field Pilot for Agriculture and Ecology: Soil Moisture Mapping Using Signal Attenuation. Sensors 2022, 22, 3913. [Google Scholar] [CrossRef]
- Watson, K.K. An instantaneous profile method for determining the hydraulic conductivity of unsaturated porous materials. Water Resour. Res. 1966, 2, 709–715. [Google Scholar] [CrossRef]
- Amoozegar-fard, D.; Warrick, W.W. Field measurements of saturated hydraulic conductivity. In Methods of Soil Analysis, Part 1: Physical and Mineralogical Methods; Klute, A., Ed.; Monograph Series 9; American Society of Agronomy: Madison, WI, USA, 1986. [Google Scholar]
- Nielsen, D.R.; Biggar, J.W.; Erh, K.T. Spatial variability of field-measured soil-water properties. Hilgardia 1993, 42, 215–259. [Google Scholar] [CrossRef]
- Dirkssen, C. Soil Physics Measurements: GeoEcology Paperback; Catena Verlag: Reiskirchen, Germany, 1999; p. 154. [Google Scholar]
- Comegna, V.; Coppola, A.; Basile, A.; Comegna, A. A Review of Approaches for Measuring Soil Hydraulic Properties and Assessing the Impacts of Spatial Dependence on the Results. In Hydrogeology—A Global Perspective; Kazemi, G.A., Ed.; InTech: Rijeka, Croatia, 2012. [Google Scholar] [CrossRef]
- Reynolds, W.D. Unsaturated Hydraulic Properties: Instantaneous Profile. In Soil Sampling and Methods of Analysis, 2nd ed.; Carter, M., Gregorich, E., Eds.; CRC Press: Boca Raton, FL, USA, 2008; pp. 1129–1138. [Google Scholar]
- Villagra, M.M.; Michielis, P.; Hartman, R. Field determined variation of the unsaturated hydraulic conductivity functions using simplified analysis of internal drainage experiments. Sci. Agric. Paracicaba 1994, 51, 113–122. [Google Scholar] [CrossRef]
- IUSS Working Group WRB. World Reference Base for Soil Resources 2006—A Framework for International Classification, Correlation and Communication, 2nd ed.; World Soil Resources Reports No. 103; FAO: Rome, Italy, 2006. [Google Scholar]
- Day, P.R. Particle fractionation and particle-size analysis. In Methods of Soil Analysis, Part 1; Black, C.A., Ed.; American Society of Agronomy: Madison, WI, USA, 1965; pp. 545–567. [Google Scholar]
- Blake, G.R.; Hartge, K.H. Particle density. In Methods of Soil Analysis, Part 1, 2nd ed.; Klute, A., Ed.; American Society of Agronomy: Madison, WI, USA, 1986; pp. 377–381. [Google Scholar]
- Allison, L.E. Organic carbon. In Methods of Soil Analysis, Part 1; Klute, A., Ed.; Agronomy Monograph No. 9; ASA and SSSA: Madison, WI, USA, 1965; pp. 1367–1378. [Google Scholar]
- Eckert, D.J. Soil pH. In Recommended Chemical Soil Test Procedures for the North Central Region; Dahnke, W.C., Ed.; Bulletin No. 221 (Revised); North Dakota Agricultural Experiment Station: Fargo, ND, USA, 1988; pp. 6–8. [Google Scholar]
- Topp, G.C.; Ferré, P.A. Water content. In Methods of Soil Analysis, Part 4, Physical Methods; Dane, J.H., Topp, G.C., Eds.; Soil Science Society of America, Inc.: Madison, WI, USA, 2002; pp. 417–446. [Google Scholar]
- Legates, D.R.; McCabe, G.J., Jr. Evaluating the use of “goodness-of-fit” measures in hydrologic and hydroclimatic model validation. Water Resour. Res. 1999, 35, 233–241. [Google Scholar] [CrossRef]
- Goovaerts, P.; AvRuskin, G.; Meliker, J.; Slotnick, M.; Jacquez, G.; Nriagu, J. Geostatistical modeling of the spatial variability of arsenic in groundwater of southeast Michigan. Water Resour. Res. 2005, 41, W07013. [Google Scholar] [CrossRef]
- Van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef]
- Mualem, Y. A new model for predicting the hydraulic conductivity of unsaturated porous media. Water Resour. Res. 1976, 12, 513–522. [Google Scholar] [CrossRef]
- Van Genuchten, M.T.; Leij, F.T.; Yates, S.R. The RETC Code for Quantifying the Hydraulic Functions of Unsaturated Soils; Report No. EPA/600/2-91/065; U.S. Environmental Protection Agency: Ada, OK, USA, 1991.
- Zhen, X.; Changjun, S.; Hua, Y.; Shirui, Z. Research and design of soil water content sensor based on high frequency capacitive. Sens. Transducers 2018, 26, 56–60. [Google Scholar]
- Jackson, J.D. Classical Electrodynamics; John Wiley and Sons Inc.: Hoboken, NJ, USA, 1962; p. 656. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Unit | Designator | Quantity | Material Type |
|---|---|---|---|
| Microcontroller board | ESP32SIM800L | 1 | Semiconductor |
| Tensiometer | MPX5100DP | 2 | Semiconductor |
| Capacitive Soil Moisture | Resistor 10 kΩ | 3 | Other |
| Resistor 1 MΩ | 3 | Other | |
| 1N4007 (High Current Rated Diode) | 3 | Semiconductor | |
| Capacitor 100 nF | 3 | Ceramic | |
| Temperature | DS18B20 | 1 | Other |
| (pullup) resistor 4.7 kΩ | 1 | Other | |
| Additional components | micro SD card slot | 1 | Other |
| Li-ion battery (3.7 V, 10,000 mAh) | 1 | Other | |
| solar charger board | 1 | Other | |
| Solar panel | 1 | Other |
| Soil Temperature (°C) | a | b | c | R2 |
|---|---|---|---|---|
| 20 | −0.0390 | 0.317 | −0.073 | 0.99 |
| 25 | −0.0348 | 0.2834 | −0.0459 | 0.99 |
| 30 | −0.0181 | 0.1933 | −0.0097 | 0.99 |
| Soil Temperature (°C) | MBE | MAE (%) | EF |
|---|---|---|---|
| 20 | −0.00014 | 1.17 | 0.89 |
| 25 | −0.00021 | 1.14 | 0.87 |
| 30 | −0.00030 | 1.69 | 0.85 |
| θs (cm3/cm3) | θr (cm3/cm3) | α (1/cm) | n | m = 1 − 1/n | K0 (cm/min) | R2vG | R2M-vG |
|---|---|---|---|---|---|---|---|
| 0.52 | 0.055 | 0.048 | 1.743 | 0.426 | 0.070 | 0.97 | 0.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Comegna, A.; Hassan, S.B.M.; Coppola, A. Development and Application of an IoT-Based System for Soil Water Status Monitoring in a Soil Profile. Sensors 2024, 24, 2725. https://doi.org/10.3390/s24092725
Comegna A, Hassan SBM, Coppola A. Development and Application of an IoT-Based System for Soil Water Status Monitoring in a Soil Profile. Sensors. 2024; 24(9):2725. https://doi.org/10.3390/s24092725
Chicago/Turabian StyleComegna, Alessandro, Shawcat Basel Mostafa Hassan, and Antonio Coppola. 2024. "Development and Application of an IoT-Based System for Soil Water Status Monitoring in a Soil Profile" Sensors 24, no. 9: 2725. https://doi.org/10.3390/s24092725
APA StyleComegna, A., Hassan, S. B. M., & Coppola, A. (2024). Development and Application of an IoT-Based System for Soil Water Status Monitoring in a Soil Profile. Sensors, 24(9), 2725. https://doi.org/10.3390/s24092725