
Adaptive Super-Twisting Sliding Mode Control for Robot Manipulators with Input Saturation


Abstract
:1. Introduction
- (1)
- A novel SMS is proposed to obtain fast convergence and avoid singular problems.
- (2)
- An ASTSMC for robot manipulators is developed and analyzed, which could achieve finite-time convergence, strong robustness, good adaptability, and high accuracy.
- (3)
- An ASTSMC with saturation compensation (ASTSMCSC) is presented, which could improve the tracking performances of robot manipulators with input saturation.
2. Dynamic Model
3. Adaptive Super-Twisting Sliding Mode Control
4. Adaptive Super-Twisting Control with Saturation Compensation
5. Simulations
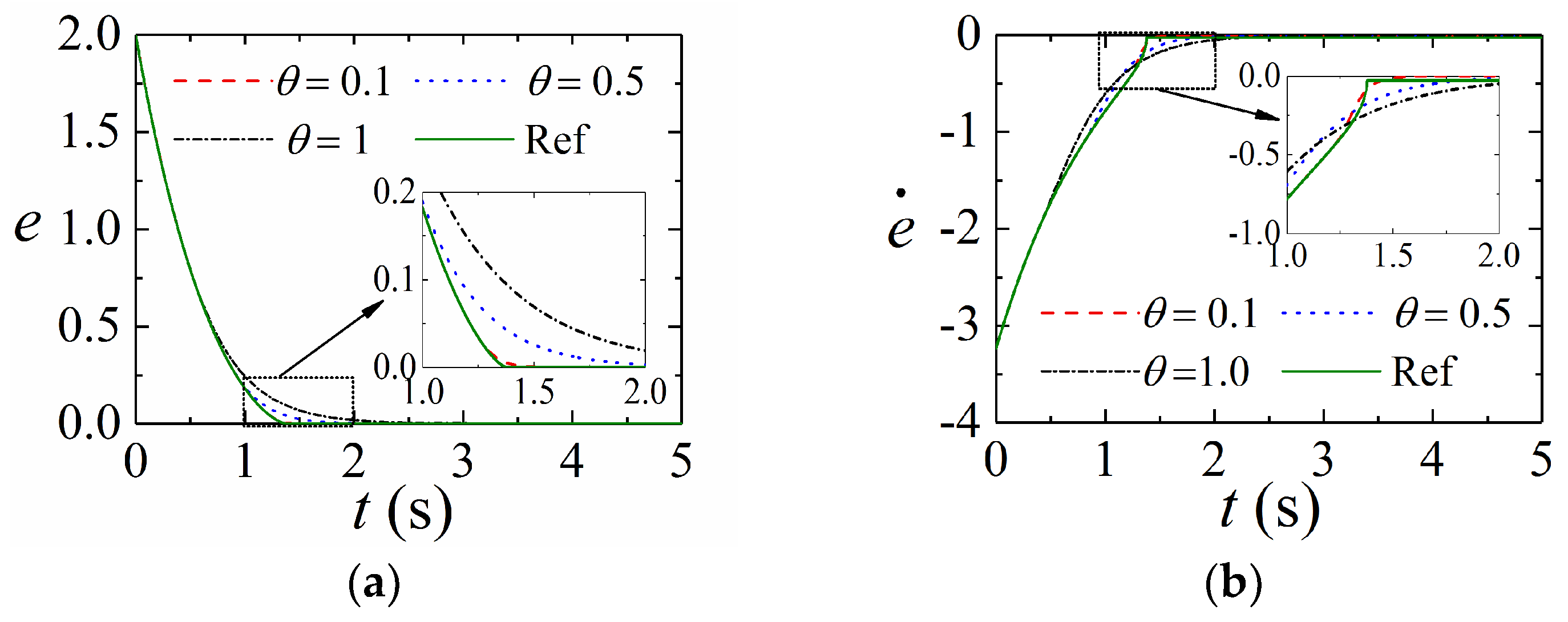
5.1. Convergence of States on the Sliding Mode Surface
5.2. Robustness against Uncertainties and Disturbances
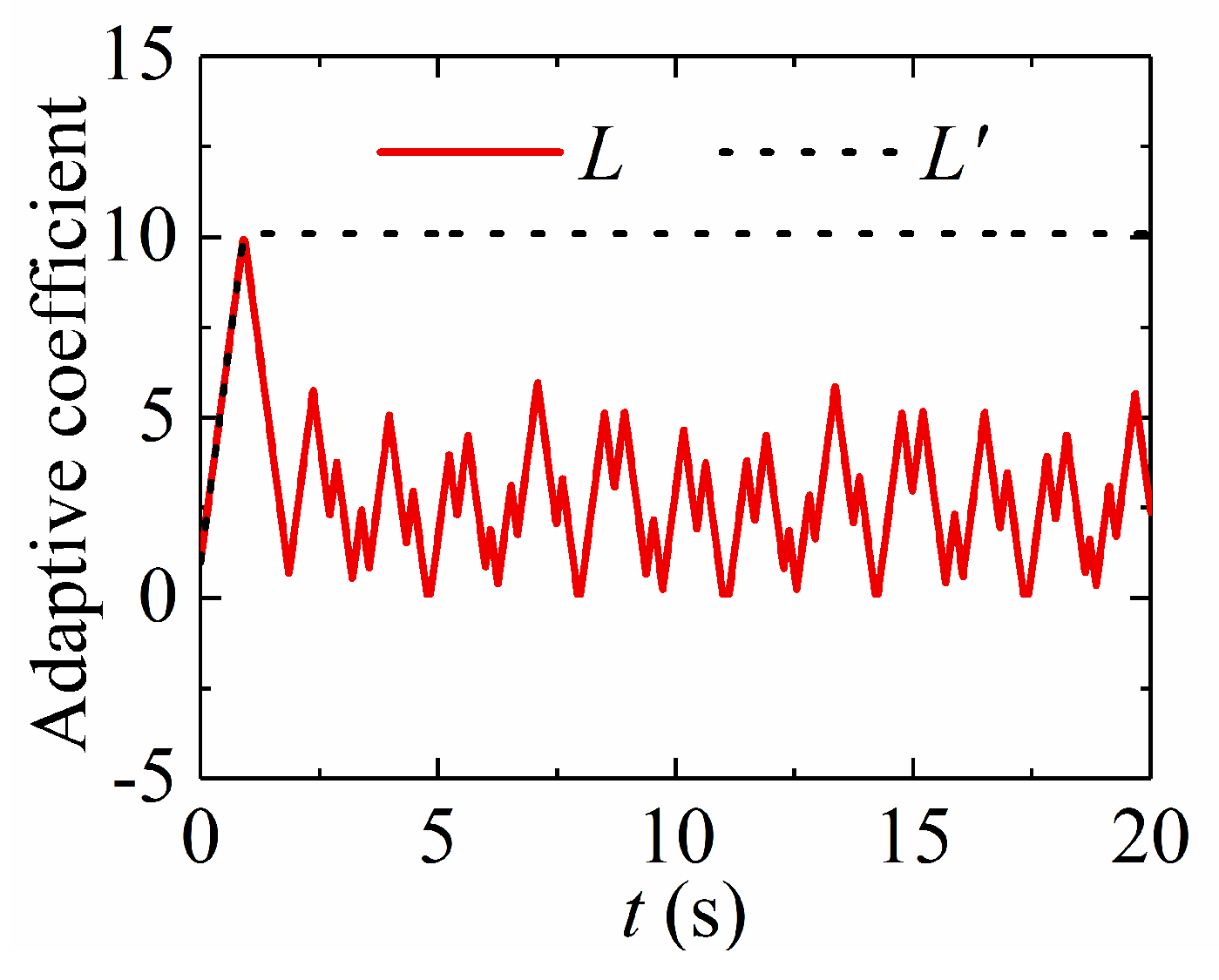
5.3. Adaptive Law
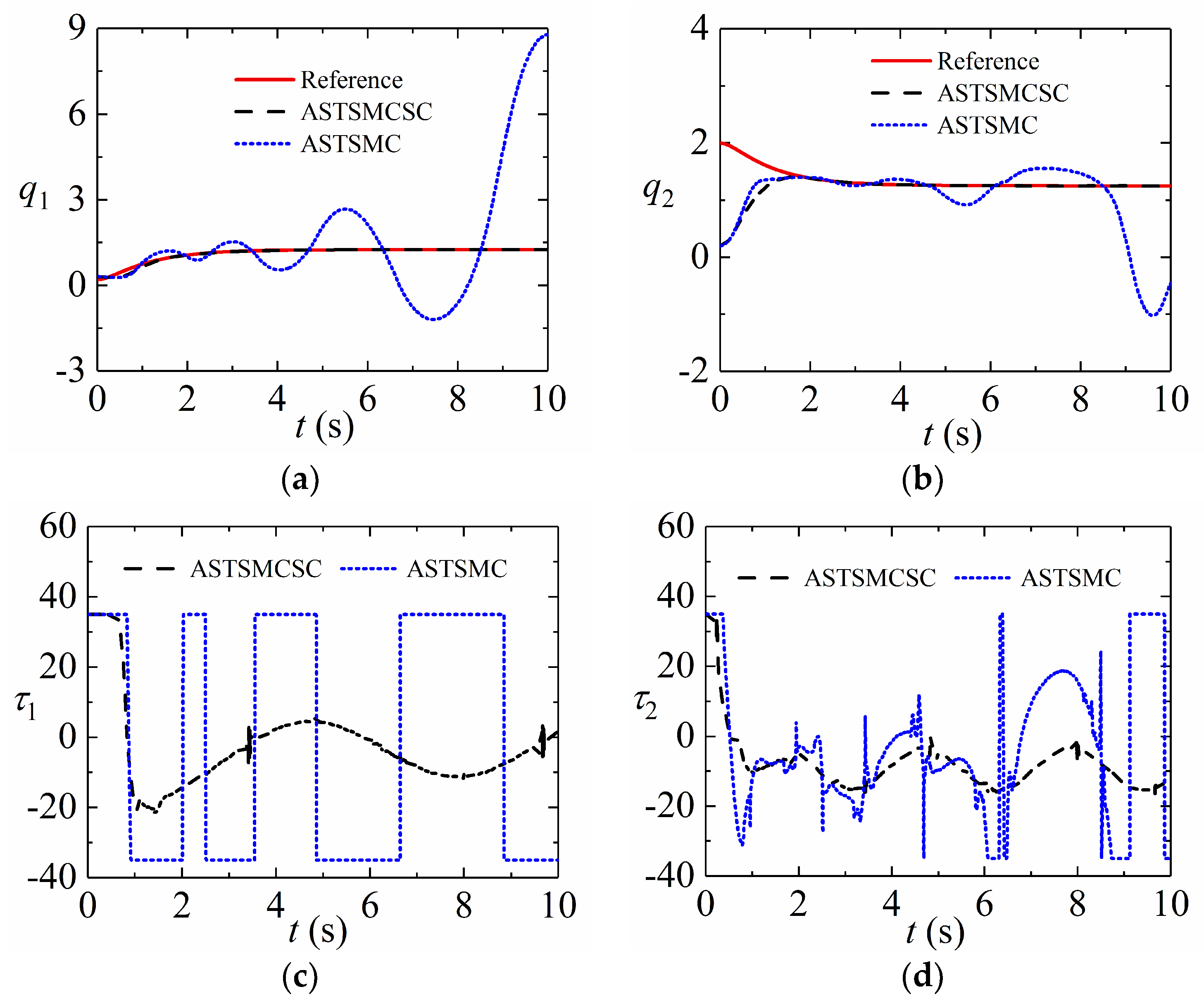
5.4. Control Performance in Presence of Input Saturation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Garriz, C.; Domingo, R. Trajectory optimization in terms of energy and performance of an industrial robot in the manufacturing industry. Sensors 2022, 22, 7538. [Google Scholar] [CrossRef] [PubMed]
- Cong, V.D. Visual servoing control of 4-DOF palletizing robotic arm for vision based sorting robot system. Int. J. Interact. Des. Manuf. (IJIDeM) 2023, 17, 717–728. [Google Scholar] [CrossRef]
- Yi, J.B.; Nasrat, S.; Jo, M.S.; Yi, S.J. A Software Platform for Quadruped Robots with Advanced Manipulation Capabilities. Sensors 2023, 23, 8247. [Google Scholar] [CrossRef] [PubMed]
- Long, Y.; Du, Z.J.; Cong, L.; Wang, W.D.; Zhang, Z.M.; Dong, W. Active disturbance rejection control based human gait tracking for lower extremity rehabilitation exoskeleton. ISA Trans. 2017, 67, 389–397. [Google Scholar] [CrossRef] [PubMed]
- Su, Y.X.; Zheng, C.H. PID control for global finite-time regulation of robot manipulators. Int. J. Syst. Sci. 2017, 48, 547–558. [Google Scholar] [CrossRef]
- Kolhe, J.P.; Shaheed, M.; Chandar, T.; Talole, S. Robust control of robot manipulators based on uncertainty and disturbance estimation. Int. J. Robust Nonlinear Control 2013, 23, 104–122. [Google Scholar] [CrossRef]
- Cui, R.; Chen, L.; Yang, C.; Chen, M. Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities. IEEE Trans. Ind. Electron. 2017, 64, 6785–6795. [Google Scholar] [CrossRef]
- Wang, H. Adaptive control of robot manipulators with uncertain kinematics and dynamics. IEEE Trans. Autom. Control 2017, 62, 948–954. [Google Scholar] [CrossRef]
- Cvejn, J. The variable-inertia modified computed-torque control of robot manipulators. Multibody Syst. Dyn. 2023, 57, 157–179. [Google Scholar] [CrossRef]
- Messaoud, S.B.; Belkhiri, M.; Belkhiri, A.; Rabhi, A. Active disturbance rejection control of flexible industrial manipulator: A MIMO benchmark problem. Eur. J. Control 2024, 77, 100965. [Google Scholar] [CrossRef]
- Avanzini, G.B.; Zanchettin, A.M.; Rocco, P. Constrained model predictive control for mobile robot manipulators. Robotica 2018, 36, 19–38. [Google Scholar] [CrossRef]
- Chen, Y.; Ding, J.; Chen, Y.; Yan, D. Nonlinear Robust Adaptive Control of Universal Manipulators Based on Desired Trajectory. Appl. Sci. 2024, 14, 2219. [Google Scholar] [CrossRef]
- Xu, S.; Wu, Z. Adaptive learning control of robot manipulators via incremental hybrid neural network. Neurocomputing 2024, 568, 127045. [Google Scholar] [CrossRef]
- Baek, J.; Jin, M.; Han, S. A new adaptive sliding-mode control scheme for application to robot manipulators. IEEE Trans. Ind. Electron. 2016, 63, 3628–3637. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, C.; Su, X.; Xu, D. Observer-based terminal sliding mode control of non-affine nonlinear systems: Finite-time approach. J. Frankl. Inst.-Eng. Appl. Math. 2018, 355, 7985–8004. [Google Scholar] [CrossRef]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-mode robot control with exponential reaching law. IEEE Trans. Ind. Electron. 2011, 58, 600–610. [Google Scholar] [CrossRef]
- Jung, S. Sliding mode control for a hybrid force control scheme of a robot manipulator under uncertain dynamics. Int. J. Control Autom. 2023, 21, 1634–1643. [Google Scholar] [CrossRef]
- Torabi, M.; Sharifi, M.; Vossoughi, G. Robust adaptive sliding mode admittance control of exoskeleton rehabilitation robots. Sci. Iran. 2018, 25, 2628–2642. [Google Scholar] [CrossRef]
- Baek, J.; Kwon, W. Practical adaptive sliding-mode control approach for precise tracking of robot manipulators. Appl. Sci. 2020, 10, 2909. [Google Scholar] [CrossRef]
- Zhao, D.; Li, S.; Gao, F. A new terminal sliding mode control for robot manipulators. Int. J. Control 2009, 82, 1804–1813. [Google Scholar] [CrossRef]
- Doan, Q.V.; Vo, A.T.; Le, T.D.; Kang, H.J.; Nguyen, N.H.A. A novel fast terminal sliding mode tracking control methodology for robot manipulators. Appl. Sci. 2020, 10, 3010. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2011, 21, 1865–1879. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Boukattaya, M.; Mezghani, N.; Damak, T. Adaptive nonsingular fast terminal sliding-mode control for the tracking problem of uncertain dynamical systems. ISA Trans. 2018, 77, 1–19. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite-time control for robot manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Mondal, S.; Mahanta, C. Adaptive second order terminal sliding mode controller for robot manipulators. J. Frankl. Inst.-Eng. Appl. Math. 2014, 351, 2356–2377. [Google Scholar] [CrossRef]
- Oliveira, J.; Oliveira, P.M.; Boaventura-Cunha, J.; Pinho, T. Chaos-based grey wolf optimizer for higher order sliding mode position control of a robotic manipulator. Nonlinear Dyn. 2017, 90, 1353–1362. [Google Scholar] [CrossRef]
- Chalanga, A.; Kamal, S.; Fridman, L.M.; Bandyopadhyay, B.; Moreno, J.A. Implementation of super-twisting control: Super-twisting and higher order sliding-mode observer-based approaches. IEEE Trans. Ind. Electron. 2016, 63, 3677–3685. [Google Scholar] [CrossRef]
- Tian, B.; Yin, L.; Wang, H. Finite-time reentry attitude control based on adaptive multivariable disturbance compensation. IEEE Trans. Ind. Electron. 2015, 62, 5889–5898. [Google Scholar] [CrossRef]
- Nagesh, I.; Edwards, C. A multivariable super-twisting sliding mode approach. Automatica 2014, 50, 984–988. [Google Scholar] [CrossRef]
- Khan, T.A.; Ullah, K.; Hafeez, G.; Khan, I.; Khalid, A.; Shafiq, Z.; Qazi, A.B. Closed-loop elastic demand control under dynamic pricing program in smart microgrid using super twisting sliding mode controller. Sensors 2020, 20, 4376. [Google Scholar] [CrossRef] [PubMed]
- Kamal, S.; Sachan, A.; Kumar, D.K.; Singh, D. Robust finite time cooperative control of second order agents: A Multi-input Multi-output higher order super-twisting based approach. ISA Trans. 2019, 86, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Kahouadji, M.; Mokhtari, M.R.; Choukchou-Braham, A.; Choukchou-Braham, A.; Cherki, B. Real-time attitude control of 3 DOF quadrotor UAV using modified super twisting algorithm. J. Frankl. Inst.-Eng. Appl. Math. 2020, 357, 2681–2695. [Google Scholar] [CrossRef]
- Kali, Y.; Saad, M.; Benjelloun, K.; Khairallah, C. Super-twisting algorithm with time delay estimation for uncertain robot manipulators. Nonlinear Dyn. 2018, 93, 557–569. [Google Scholar] [CrossRef]
- Jeong, C.-S.; Kim, J.-S.; Han, S.-I. Tracking Error Constrained Super-twisting Sliding Mode Control for Robotic Systems. Int. J. Control Autom. Syst. 2018, 16, 804–814. [Google Scholar] [CrossRef]
- Mobayen, S.; Tchier, F.; Ragoub, L. Design of an adaptive tracker for n-link rigid robot manipulators based on super-twisting global nonlinear sliding mode control. Int. J. Syst. Sci. 2017, 48, 1990–2002. [Google Scholar] [CrossRef]
- Chen, M.; Ren, B.B.; Wu, Q.X.; Jiang, C.S. Anti-disturbance control of hypersonic flight vehicles with input saturation using disturbance observer. Sci. China Inform. Sci. 2015, 58, 1–12. [Google Scholar] [CrossRef]
- Li, S.S.; Wang, Y.N.; Tan, J.H. Adaptive and robust control of quadrotor aircrafts with input saturation. Nonlinear Dyn. 2017, 89, 255–265. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Parameters |
|---|---|
| ASTTSMC | , , , , , , , |
| ANFTSMC | , , , , , |
| ANSMC | , , , |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, C.; Zhang, H.; Liu, Y.; Zhang, J. Adaptive Super-Twisting Sliding Mode Control for Robot Manipulators with Input Saturation. Sensors 2024, 24, 2783. https://doi.org/10.3390/s24092783
Jing C, Zhang H, Liu Y, Zhang J. Adaptive Super-Twisting Sliding Mode Control for Robot Manipulators with Input Saturation. Sensors. 2024; 24(9):2783. https://doi.org/10.3390/s24092783
Chicago/Turabian StyleJing, Chenghu, Hui Zhang, Yafeng Liu, and Jing Zhang. 2024. "Adaptive Super-Twisting Sliding Mode Control for Robot Manipulators with Input Saturation" Sensors 24, no. 9: 2783. https://doi.org/10.3390/s24092783
APA StyleJing, C., Zhang, H., Liu, Y., & Zhang, J. (2024). Adaptive Super-Twisting Sliding Mode Control for Robot Manipulators with Input Saturation. Sensors, 24(9), 2783. https://doi.org/10.3390/s24092783