Soft Sensory-Motor System Based on Ionic Solution for Robotic Applications


Abstract
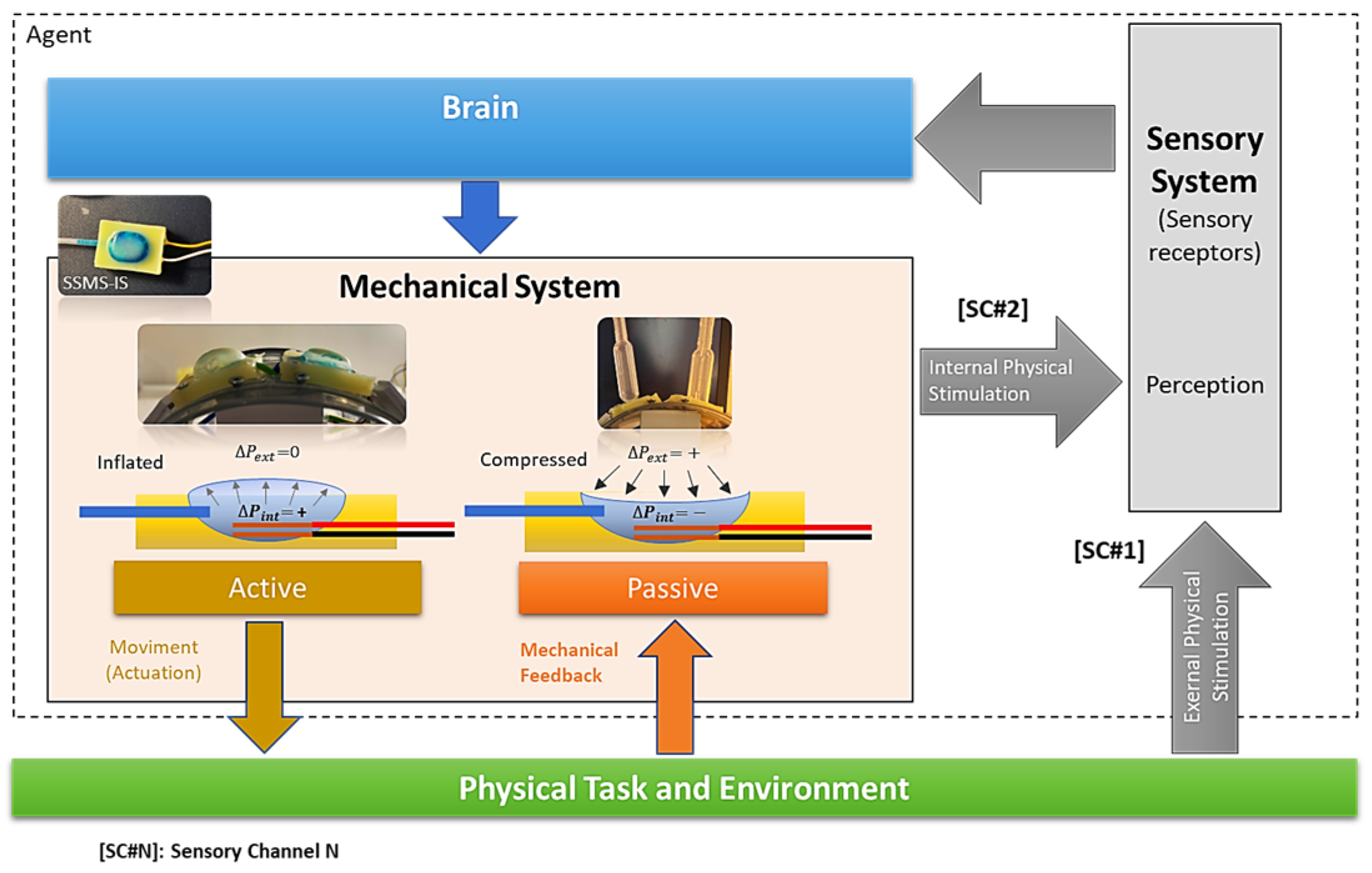
1. Introduction
2. Materials and Methods
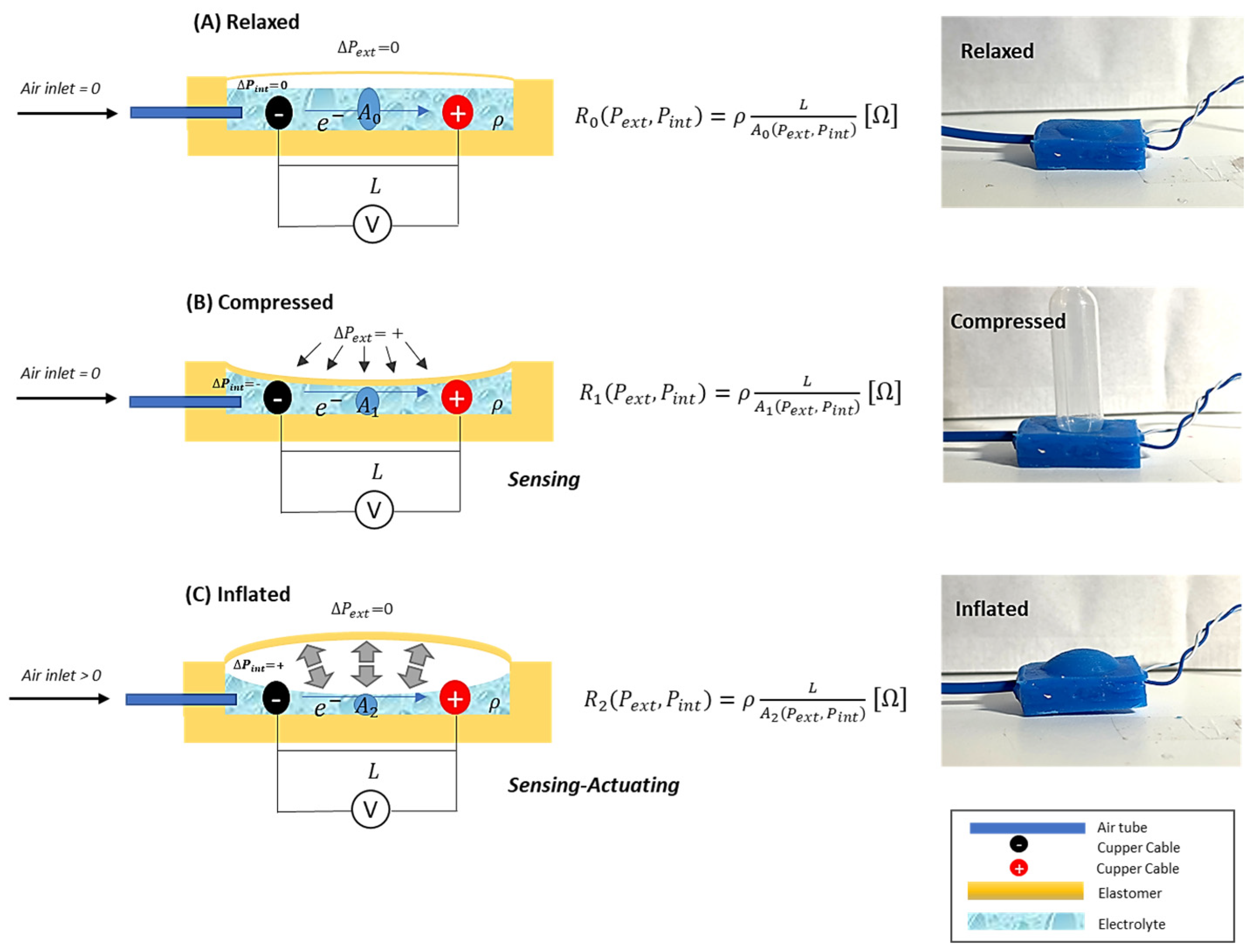
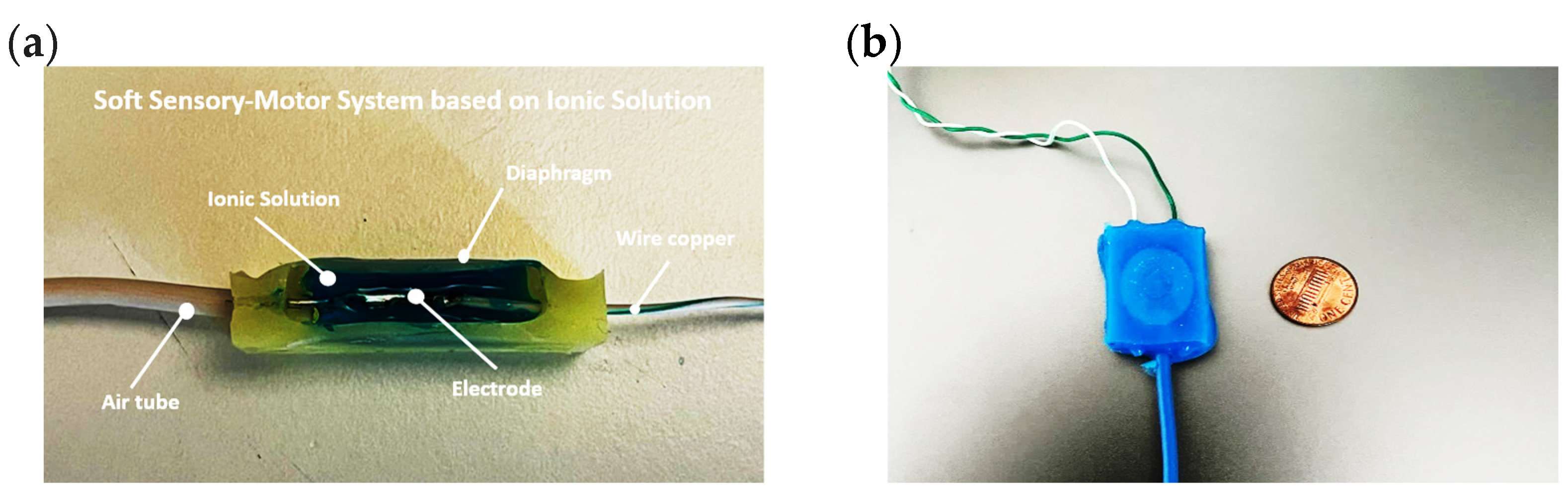
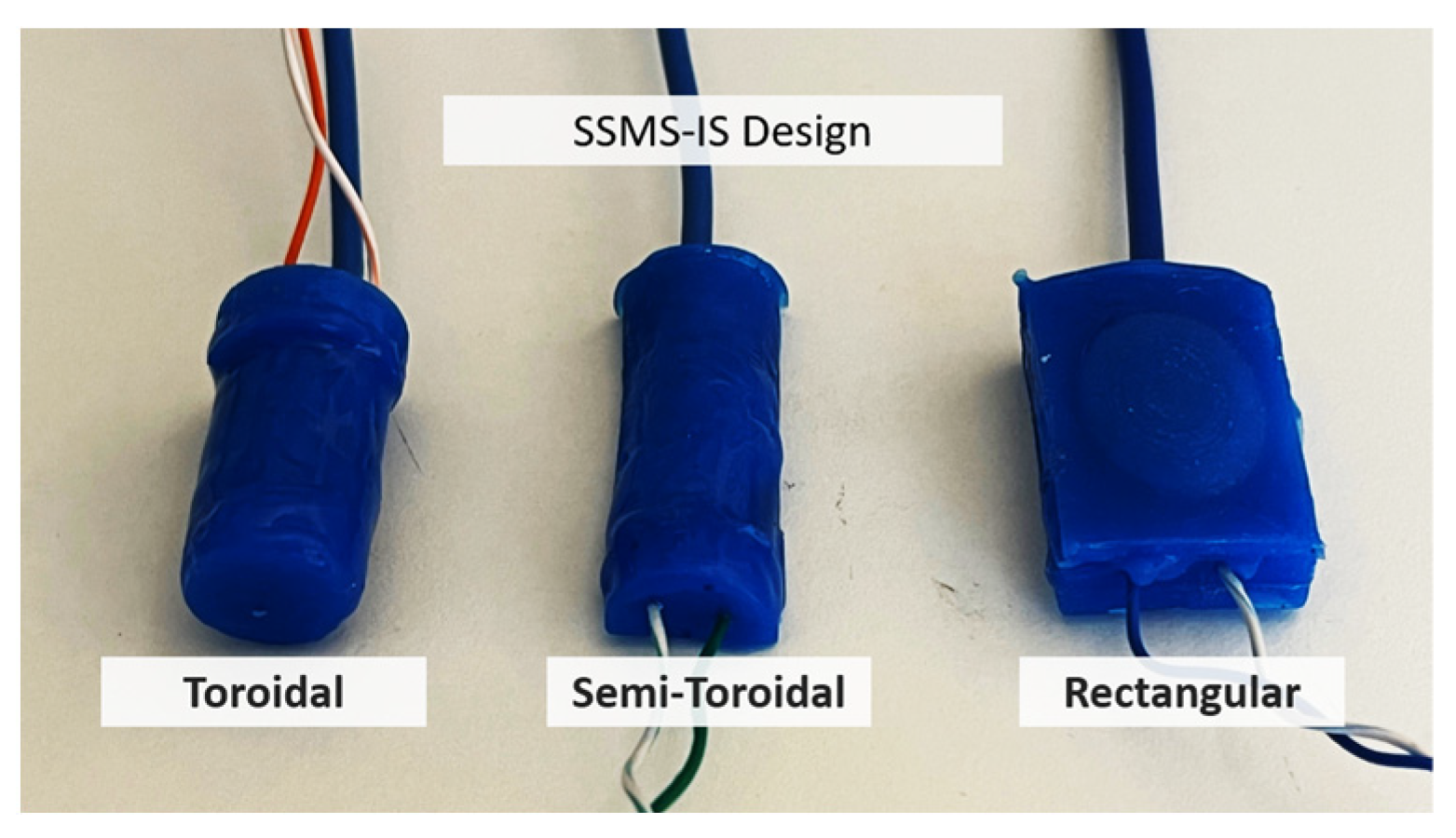
2.1. SSMS-IS Design
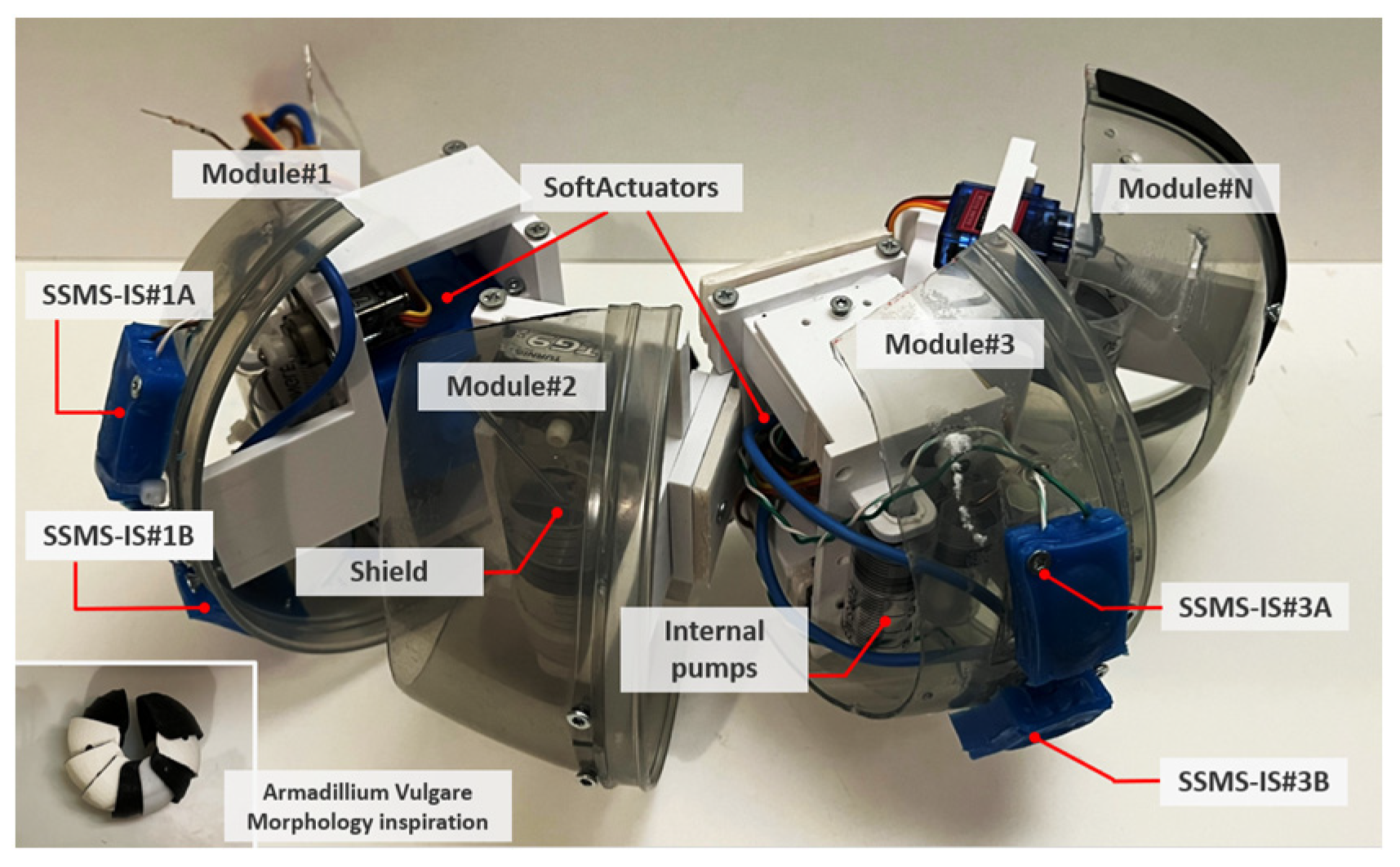
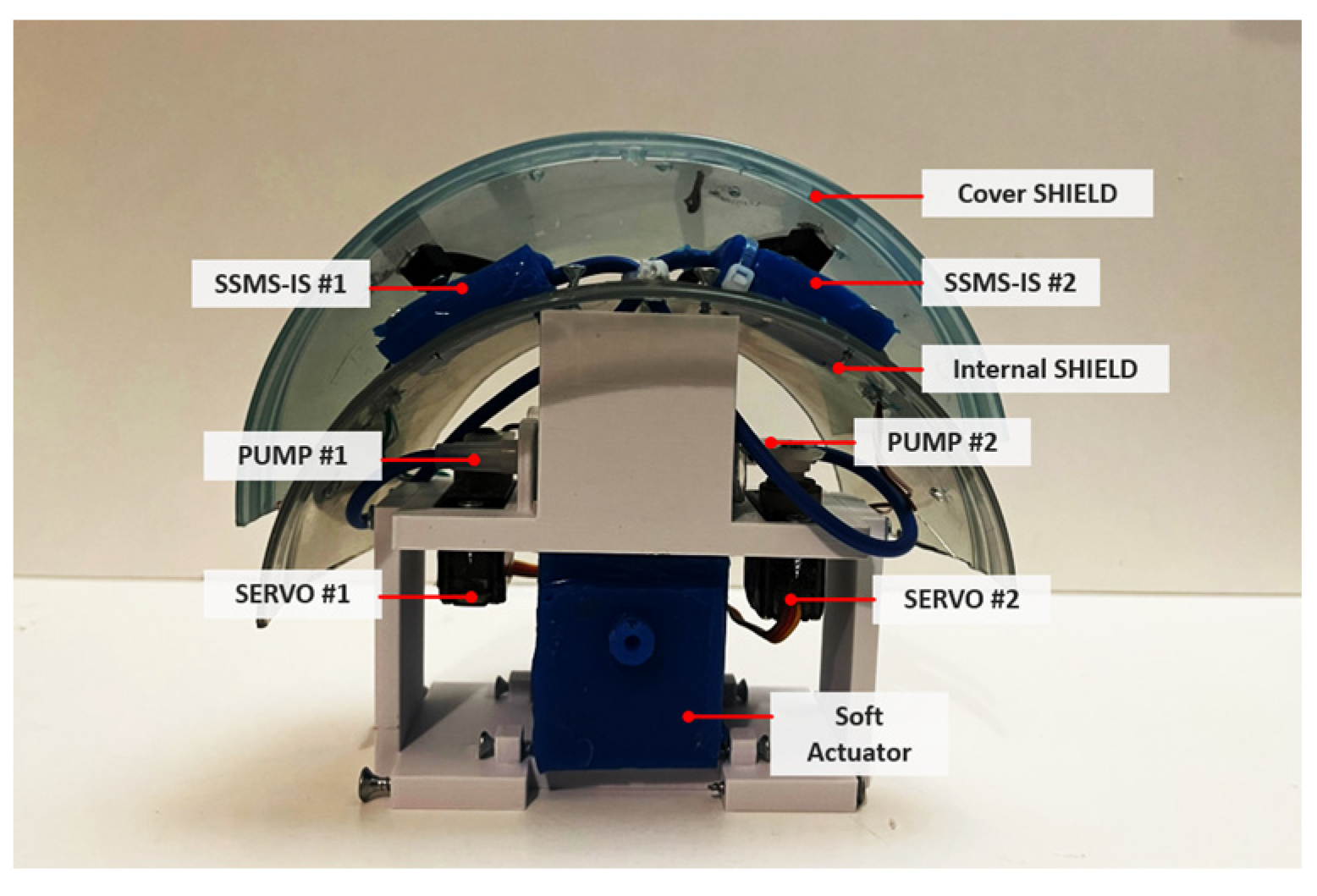
2.2. Robot Design
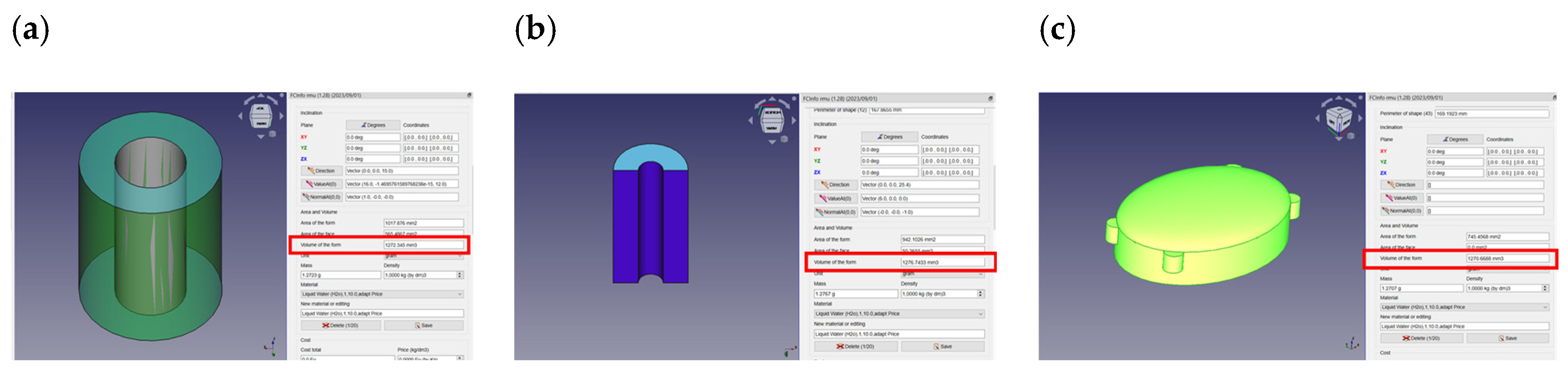
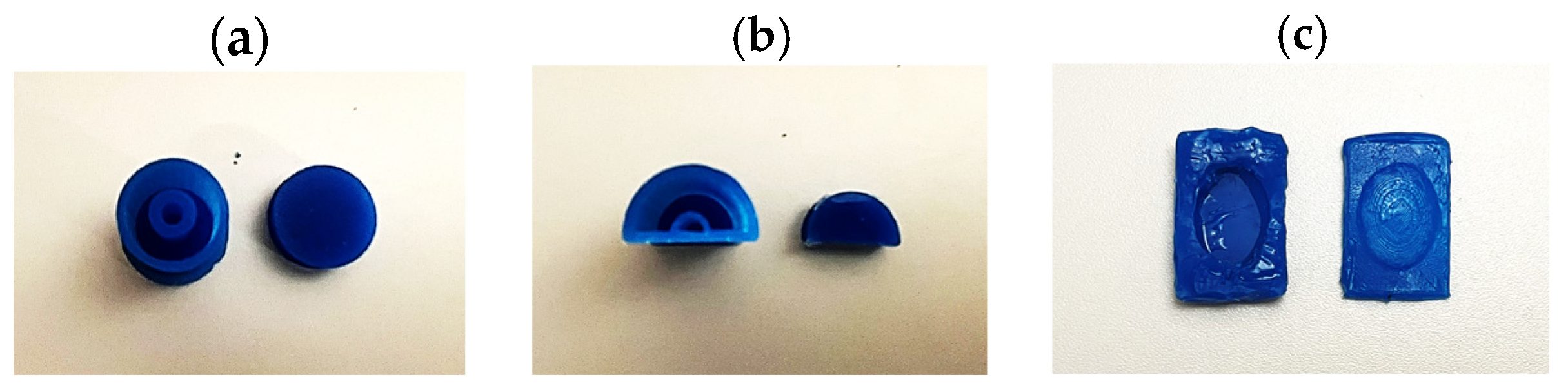
2.3. Fabrication
3. Results
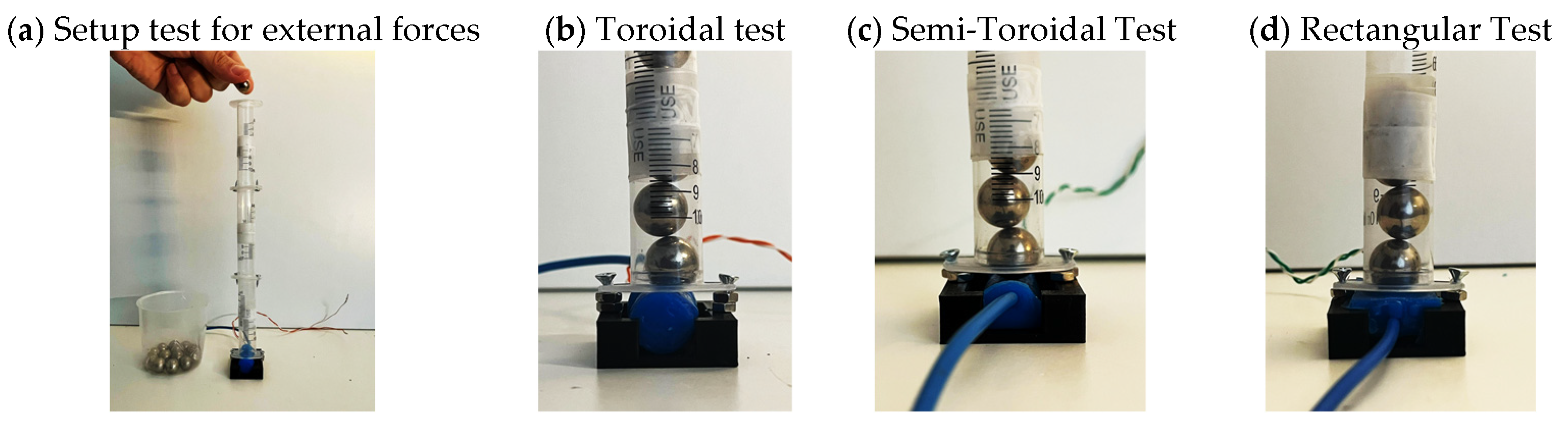
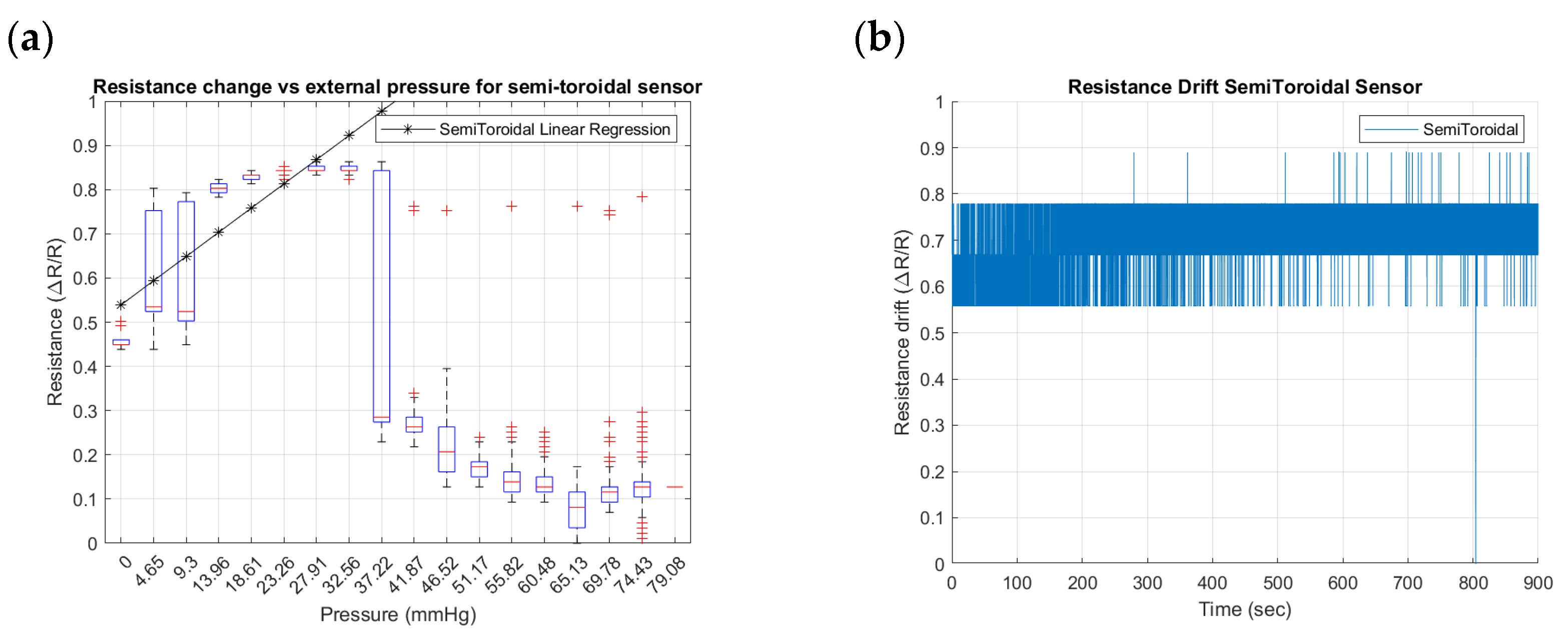
3.1. Performance for External Input Pressure of Different Designs of SSMS-IS
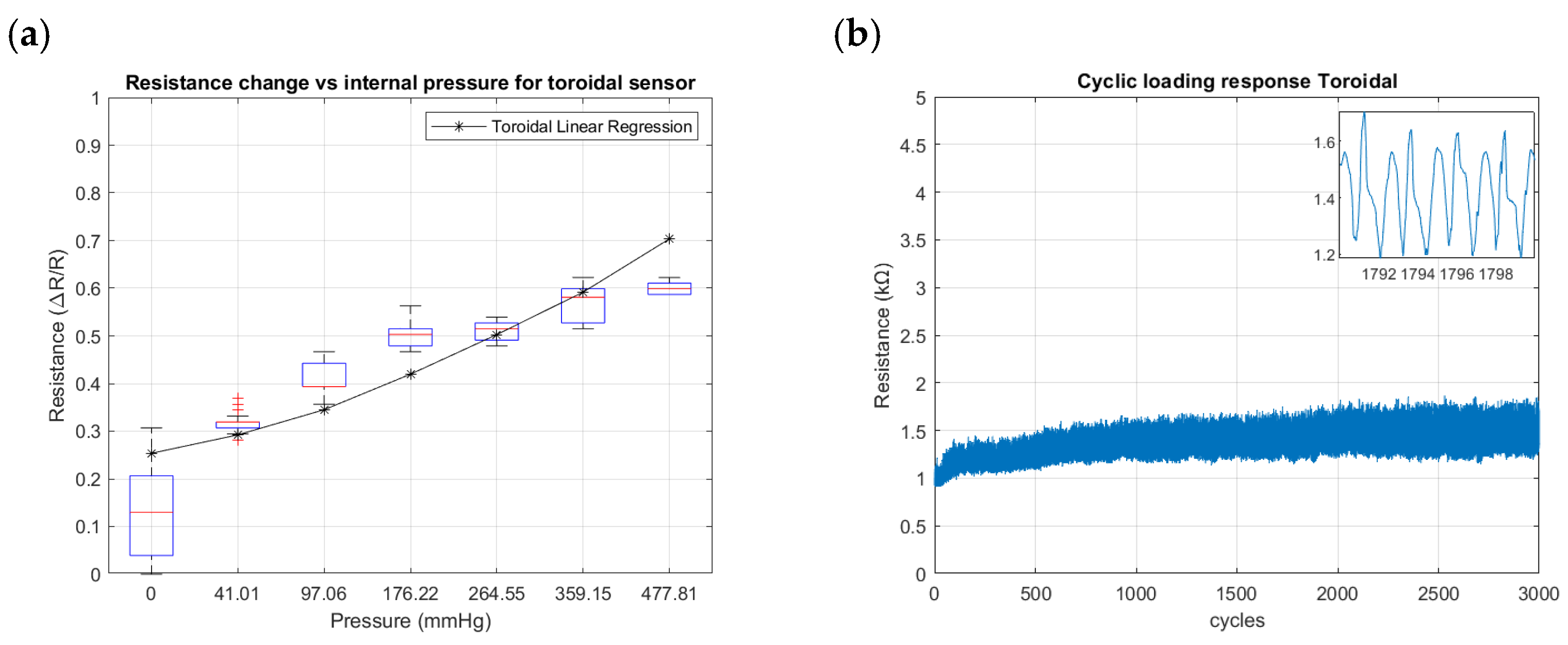
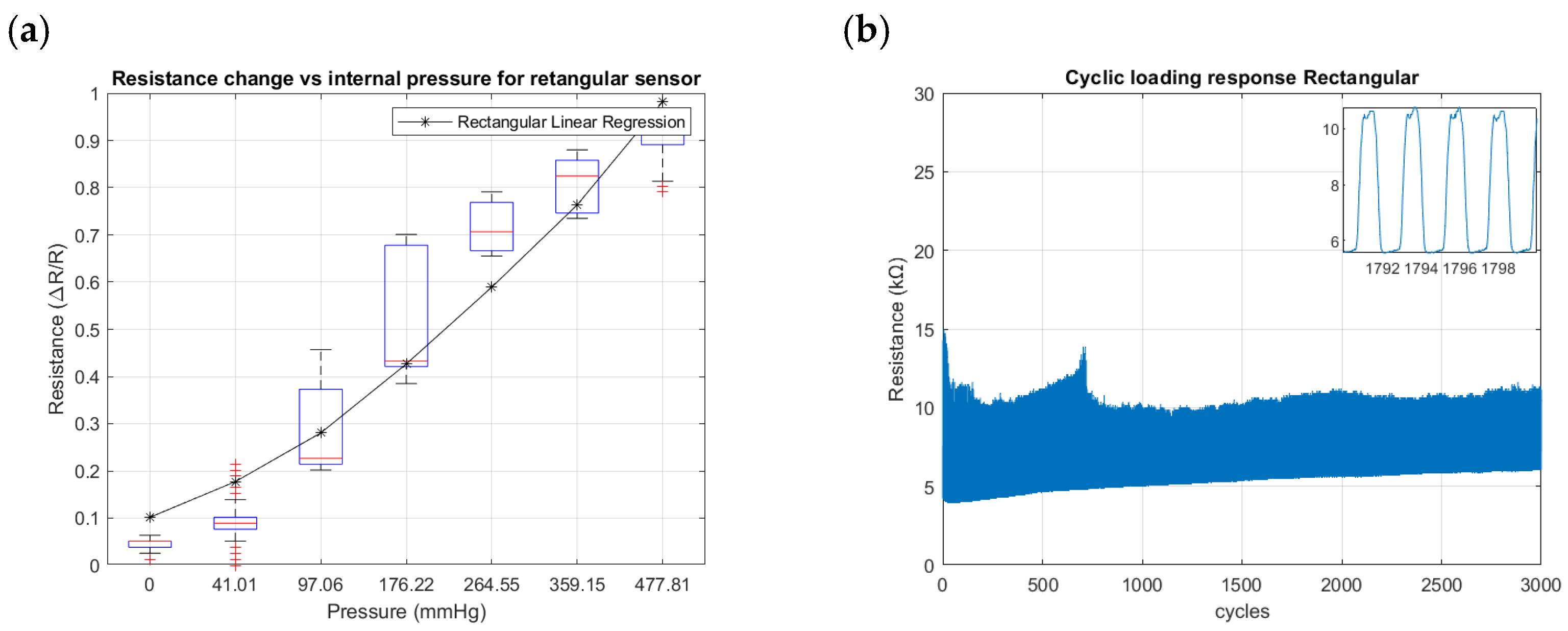
3.2. Performance for Internal Input Pressure of Different Designs of SSMS-IS
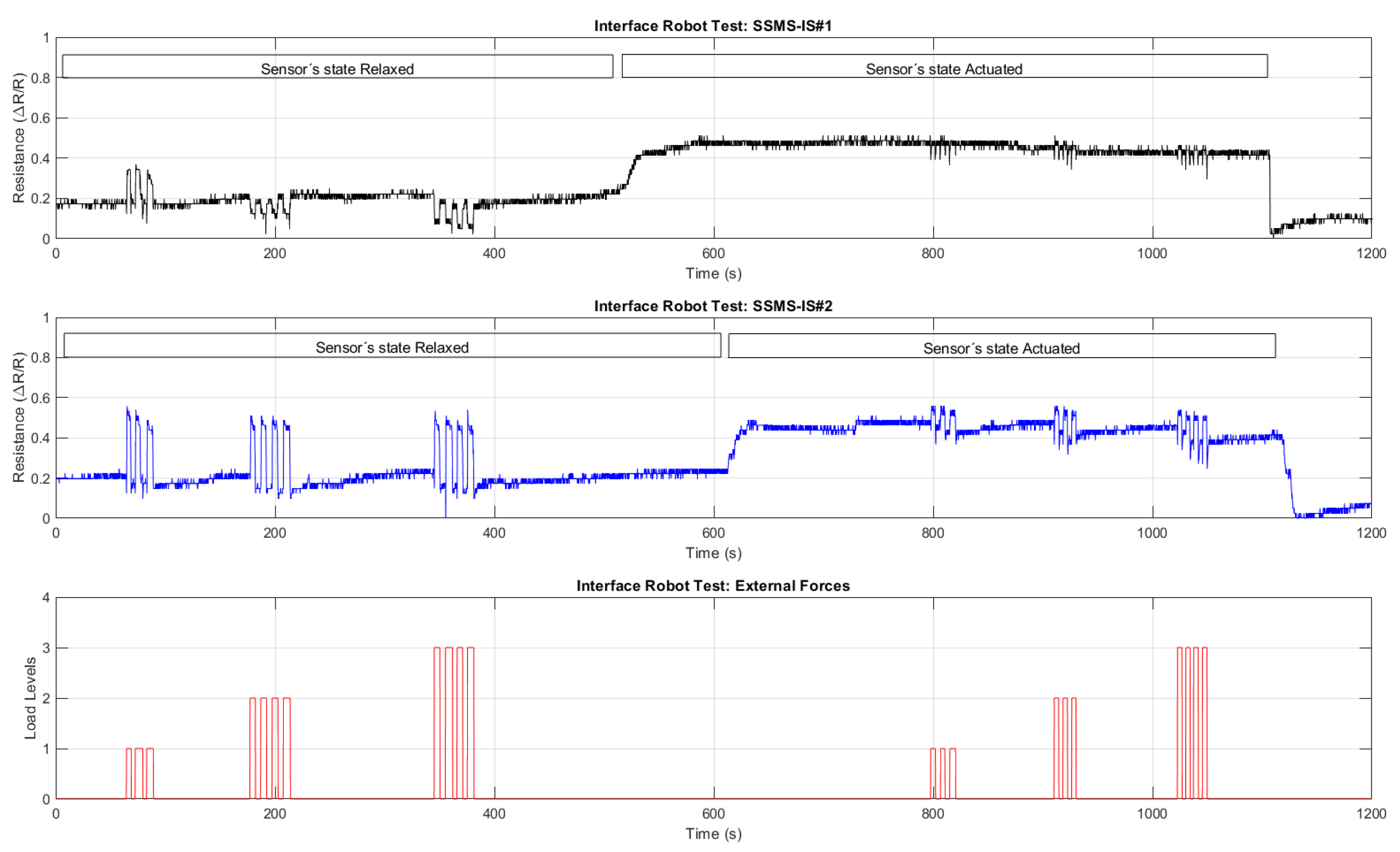
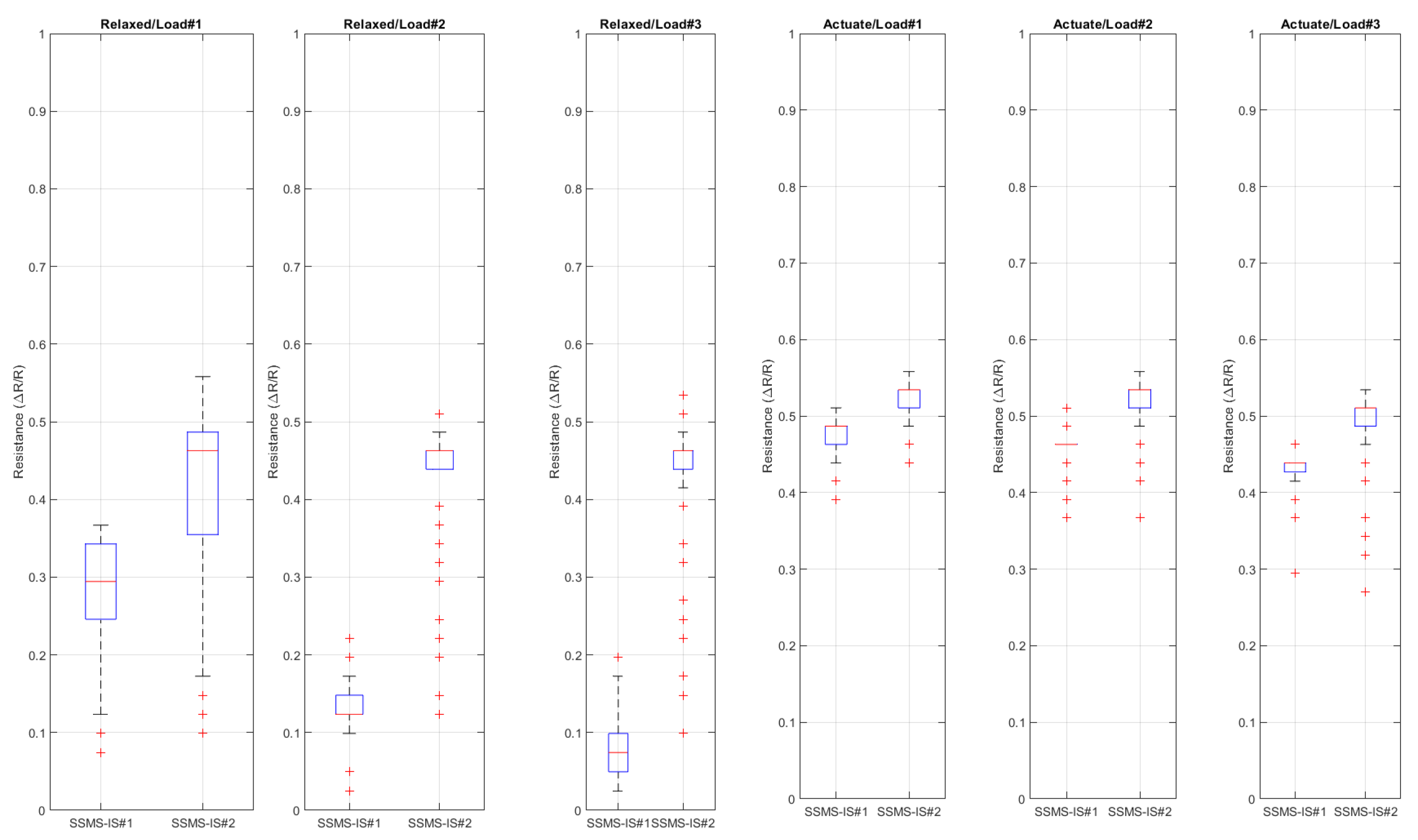
3.3. Performance of SSMS-IS in the Robot Application
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Description | Unit |
| External pressure | N·m−2 | |
| Internal pressure | N·m−2 | |
| L | Length between electrodes | mm |
| A | Area of the electrolyte between electrodes | mm2 |
| R | Electric resistance | Ω |
| Electrical resistivity | - | |
| V | Voltage between electrodes | kg·m2·s−3·A−1 |
| External force | N | |
| Abbreviation | Description | |
| SSMS-IS | Soft sensory-motor system based on ionic solution | - |
References
- Nakajima, K.; Hauser, H.; Li, T.; Pfeifer, R. Exploiting the Dynamics of Soft Materials for Machine Learning. Soft Robot. 2018, 5, 339–347. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Laschi, C.; Cianchetti, M. Soft robotics: New perspectives for robot bodyware and control. Front. Bioeng. Biotechnol. 2014, 2, 3. [Google Scholar] [CrossRef] [PubMed]
- Pfeifer, R.; Lungarella, M.; Lida, F. Self-Organization, Embodiment, and Biologically Inspired Robotics. Science 2007, 318, 1088–1093. [Google Scholar] [CrossRef] [PubMed]
- Wolpert, D.M.; Diedrichsen, J.; Flanagan, R. Principles of sensorimotor learning. Neuroscience 2011, 12, 739–751. [Google Scholar] [CrossRef] [PubMed]
- Hauser, H.; Füchslin, R.M.; Pfeifer, R. (Eds.) Morphological Computation: The Body as a Computational Resource. In Opinions and Outlooks on Morphological Computation; Self-Published; 2014; pp. 226–244. Available online: https://www.researchgate.net/publication/267567971_Morphological_Computation_-_The_Body_as_a_Computational_Resource (accessed on 24 April 2024).
- Flórez, J.A.; Velásquez, A.E.F. Calibration of force sensing resistors (fsr) for static and dynamic applications. In Proceedings of the IEEE Andescon, Bogota, Colombia, 15–17 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Muth, J.; Vogt, D.; Truby, R.; Mengüç, Y.; Kolesky, D.; Wood, R.; Lewis, J. Embedded 3D Printing of Strain Sensors within Highly Stretchable Elastomers. Adv. Mater. 2014, 26, 6307–6312. [Google Scholar] [CrossRef] [PubMed]
- Preechayasomboon, P.; Richburg, C.; Rombokas, E.E.F. Multi-modal sensing and actuation in biomechanical hydraulic and pneumatic systems. In Proceedings of the Northwest Biomechanics Symposium, University of Oregon, Eugene, OR, USA, 19–20 May 2017. [Google Scholar]
- Russo, S.; Ranzani, T.; Liu, H.; Nefti-Meziani, S.; Althoefer, K.; Menciassi, A. Soft and Stretchable Sensor Using Biocompatible Electrodes and Liquid for Medical Applications. Soft Robot. 2015, 2, 146–154. [Google Scholar] [CrossRef] [PubMed]
- Cheung, Y.N.; Zhu, Y.; Cheng, C.H.; Chao, C.; Leung, W.W.-F. A Novel Fluidic Strain Sensor for Large Strain Measurement. Sens. Actuators A Phys. 2008, 147, 401–408. [Google Scholar] [CrossRef]
- Almassri, A.M.; Hasan, W.Z.; Ahmad, S.A.; Ishak, A.J.; Ghazali, A.M.; Talib, D.N.; Wada, C. Pressure sensor: State of the art, design, and application for robotic hand. J. Sens. 2015, 2015, 846487. [Google Scholar] [CrossRef]
- Hamman, J.H. Composition and applications of Aloe vera leaf gel. Molecules 2008, 13, 1599–1616. [Google Scholar] [CrossRef]
- Volkov, A.G.; Nyasani, E.K.; Tuckett, C.; Scott, J.M.; Jackson, M.M.; Greeman, E.A.; Greenidge, A.S.; Cohen, D.O.; Volkova, M.I.; Shtessel, Y.B. Electrotonic potentials in Aloe vera L.: Effects of intercellular and external electrodes arrangement. Bioelectrochemistry 2017, 113, 60–68. [Google Scholar] [CrossRef] [PubMed]
- Adam, A.A.; Soleimani, H.; Dennis, J.O.; Aldaghri, O.A.; Alsadig, A.; Ibnaouf, K.H.; Abubakar Abdulkadir, B.; Wadi, I.A.; Cyriac, V.; Shukur, M.F.B.A. Insight into the Effect of Glycerol on Dielectric Relaxation and Transport Properties of Potassium-Ion-Conducting Solid Biopolymer Electrolytes for Application in Solid-State Electrochemical Double-Layer Capacitor. Molecules. 2023, 28, 3461. [Google Scholar] [CrossRef] [PubMed]
- Meaney, P.M.; Fox, C.J.; Geimer, S.D.; Paulsen, K.D. Electrical Characterization of Glycerin: Water Mixtures: Implications for use as a Coupling Medium in Microwave Tomography. IEEE Trans. Microw. Theory Tech. 2017, 65, 1471–1478. [Google Scholar] [CrossRef] [PubMed]
- Sujeesh, V.; Ponraj, G.; Ren, H. Soft Ionic Pressure Sensor with Aloe Vera Gel for Low-Pressure Applications. Micromachines 2022, 13, 146–159. [Google Scholar] [CrossRef]
- Li, R.; Zhou, Q.; Bi, Y.; Cao, S.; Xia, X.; Yang, A.; Li, S.; Xiao, X. Research Progress of Flexible Capacitive Pressure Sensor for Sensitivity Enhancement Approaches. Sens. Actuators A Phys. 2021, 321, 112425. [Google Scholar] [CrossRef]
- Jena, S.; Gupta, A. Review on Pressure Sensors: A Perspective from Mechanical to Micro-Electro-Mechanical Systems. Sens. Rev. 2021, 41, 320–329. [Google Scholar] [CrossRef]
- Lessing, J.A.; Whitesides, G.M.; Martinez, R.V.; Yang, D.; Mosadegh, B.; Galloway, K.C.; Güder, F.; Tayi, A.S. Sensors for Soft Robots and Soft Actuators. U.S. Patent US10,576,643 B2, 3 March 2020. [Google Scholar]
- Müller, V.C.; Hoffmann, M. What Is Morphological Computation? On How the Body Contributes to Cognition and Control. Artif. Life. 2017, 23, 1–24. [Google Scholar] [CrossRef] [PubMed]
- Smigel, J.T.; Gibbs, A.G. Conglobation in the pill bug, Armadillidium vulgare, as a water conservation mechanism. J. Insect Sci. 2008, 8, 9. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, J.; Jin, G. Pillbot: A soft origami robot inspired by pill bugs. In Proceedings of the RICAI 20, Shanghai, China, 20–22 September 2019. [Google Scholar]
- Mintchev, S.; Floreano, D. Adaptive Morphology: A design principle for multimodal and multifunctional robots. IEEE Robot. Autom. Mag. 2016, 23, 42–54. [Google Scholar] [CrossRef]
- Aoki, T.; Asami, K.; Ito, S.; Waki, S. Development of quadruped walking robot with spherical shell: Improvement of climbing over a step. Robomech J. 2020, 7, 22. [Google Scholar] [CrossRef]
- Rohmer, E.; Singh, S.P.N.; Freese, M. CoppeliaSim (formerly V-REP): A Versatile and Scalable Robot Simulation Framework. IEEE/RSJ Int. Conf. Intell. Robot. Syst. 2013. Available online: www.coppeliarobotics.com (accessed on 30 January 2024).
- Yuk, H.; Zhang, T.; Parada, G.A.; Liu, X.; Zhao, X. Skin-inspired hydrogel–elastomer hybrids with robust interfaces and functional microstructures. Nat. Commun. 2016, 7, 12028. [Google Scholar] [CrossRef] [PubMed]
- Dixit, R.N. Compression Characteristics of Elastomer Elements. Master’s Thesis, KTH, Stockholm, Sweden, 2021. [Google Scholar]
- Zhang, L.; Wu, X.; Gao, R.; Pan, L.; Zhang, Q. A multi-sensor fusion positioning approach for indoor mobile robot using factor graph. Measurement 2023, 216, 112926. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
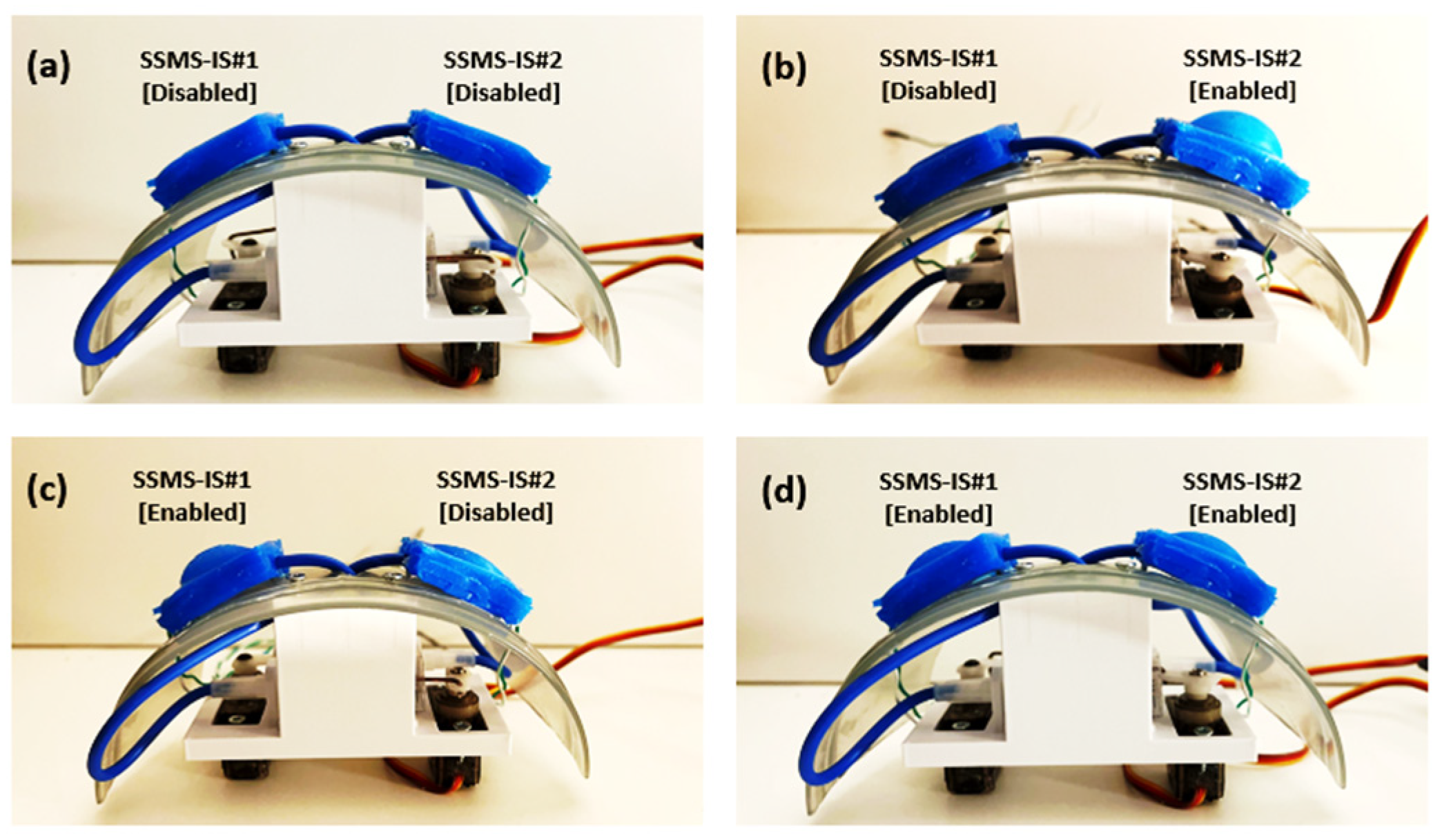
| Robot Body State | SSMS-IS#1 | SSMS-IS#2 |
|---|---|---|
| State 1 | Disabled | Disabled |
| State 2 | Disabled | Enabled |
| State 3 | Enabled | Disabled |
| State 4 | Enabled | Enabled |
| Test Performance | Toroidal | Semi-Toroidal | Rectangular |
|---|---|---|---|
| Linear external sensitivity % variation | ~20% | ~35% | ~45% |
| Linear external sensitivity range | 0–41.87 mmHg | 0–27.91 mmHg | 0–46.52 mmHg |
| Linear internal sensitivity % variation | ~45% | ~55% | ~85% |
| Linear internal sensitivity range | 0–477.81 mmHg | 0–97.06 mmHg | 0–477.81 mmHg |
| Drift | ~35% | ~35% | ~10% |
| Durability | 3000 cycles | 3000 cycles | 3000 cycles |
| Variance (σ2) | Median | |||||
|---|---|---|---|---|---|---|
| Load | Force | Relaxed | Actuated | Relaxed | Actuated | |
| SSMS-IS#1 | 1 | 1.8 N | 0.0051 | 5.7350 × 10−4 | 0.29435 | 0.48666 |
| 2 | 2.4 N | 0.0005 | 0.0008 | 0.12351 | 0.46279 | |
| 3 | 2.9 N | 0.0010 | 0.0010 | 0.07426 | 0.43887 | |
| SSMS-IS#2 | 1 | 1.8 N | 0.0169 | 6.9240 × 10−4 | 0.46279 | 0.53425 |
| 2 | 2.4 N | 0.0092 | 0.0014 | 0.46279 | 0.53425 | |
| 3 | 2.9 N | 0.0086 | 0.0025 | 0.46279 | 0.51048 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Santos, S.R.d.; Rohmer, E. Soft Sensory-Motor System Based on Ionic Solution for Robotic Applications. Sensors 2024, 24, 2900. https://doi.org/10.3390/s24092900
Santos SRd, Rohmer E. Soft Sensory-Motor System Based on Ionic Solution for Robotic Applications. Sensors. 2024; 24(9):2900. https://doi.org/10.3390/s24092900
Chicago/Turabian StyleSantos, Sender Rocha dos, and Eric Rohmer. 2024. "Soft Sensory-Motor System Based on Ionic Solution for Robotic Applications" Sensors 24, no. 9: 2900. https://doi.org/10.3390/s24092900
APA StyleSantos, S. R. d., & Rohmer, E. (2024). Soft Sensory-Motor System Based on Ionic Solution for Robotic Applications. Sensors, 24(9), 2900. https://doi.org/10.3390/s24092900