
High-Performance Optical Fiber Displacement Sensor with Extended Linear Range and Sensitivity

 ,
,  ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Working Principle of the Optical Fiber Displacement Sensor
3. Theoretical Model
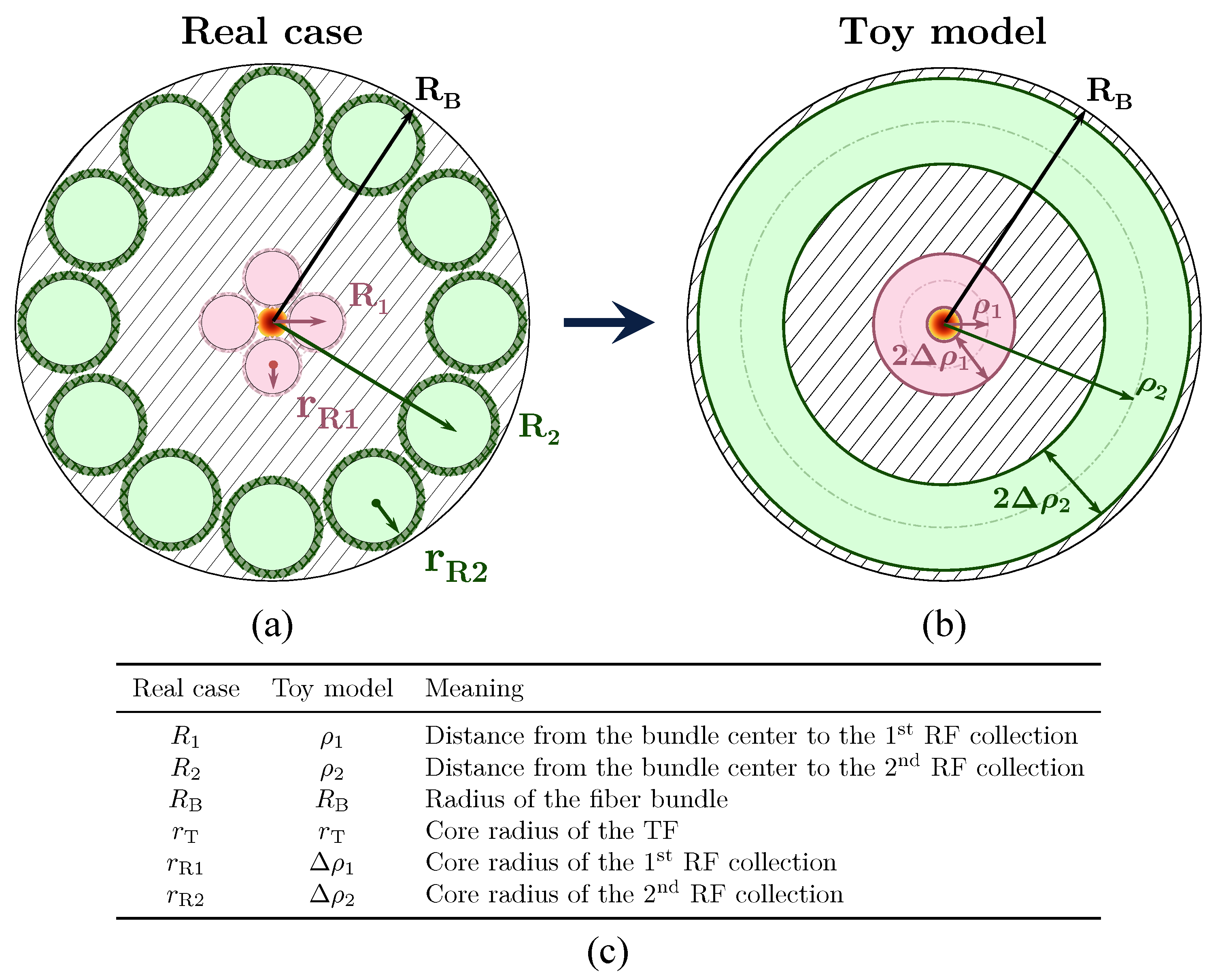
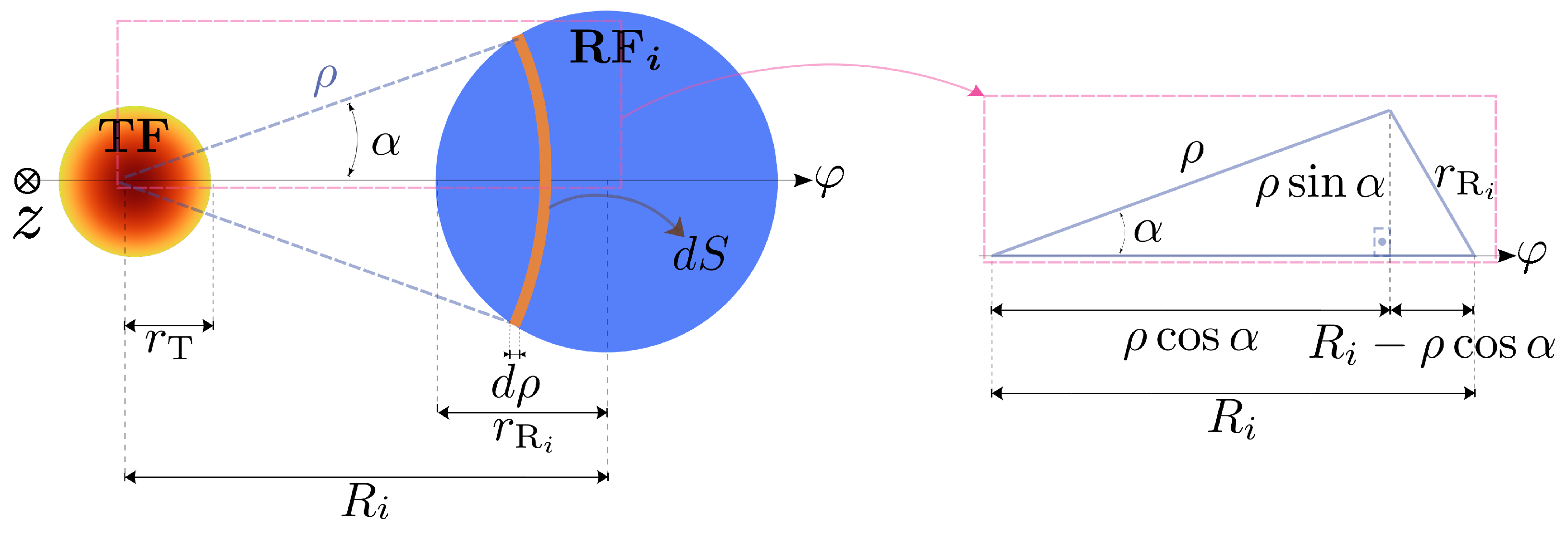
3.1. Toy Model Approach
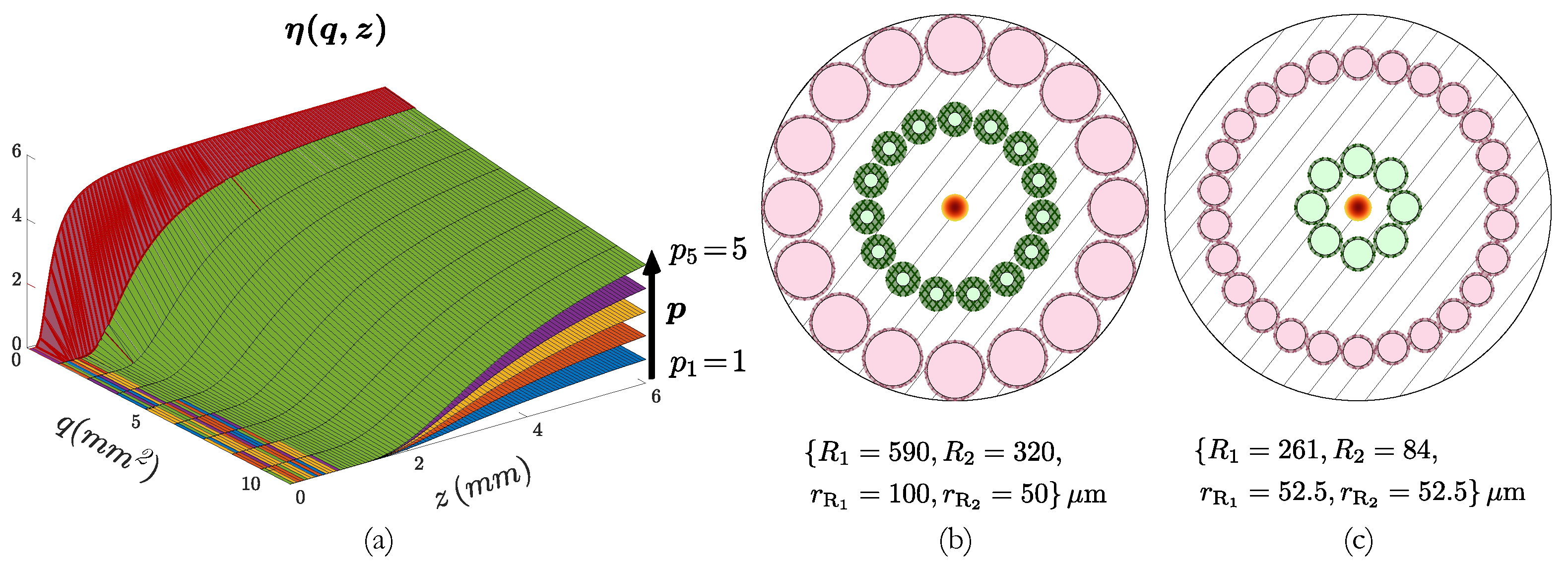
3.2. Toy Model Outcomes
3.3. Relationship Between the Real Case Geometry and the OFDS Response
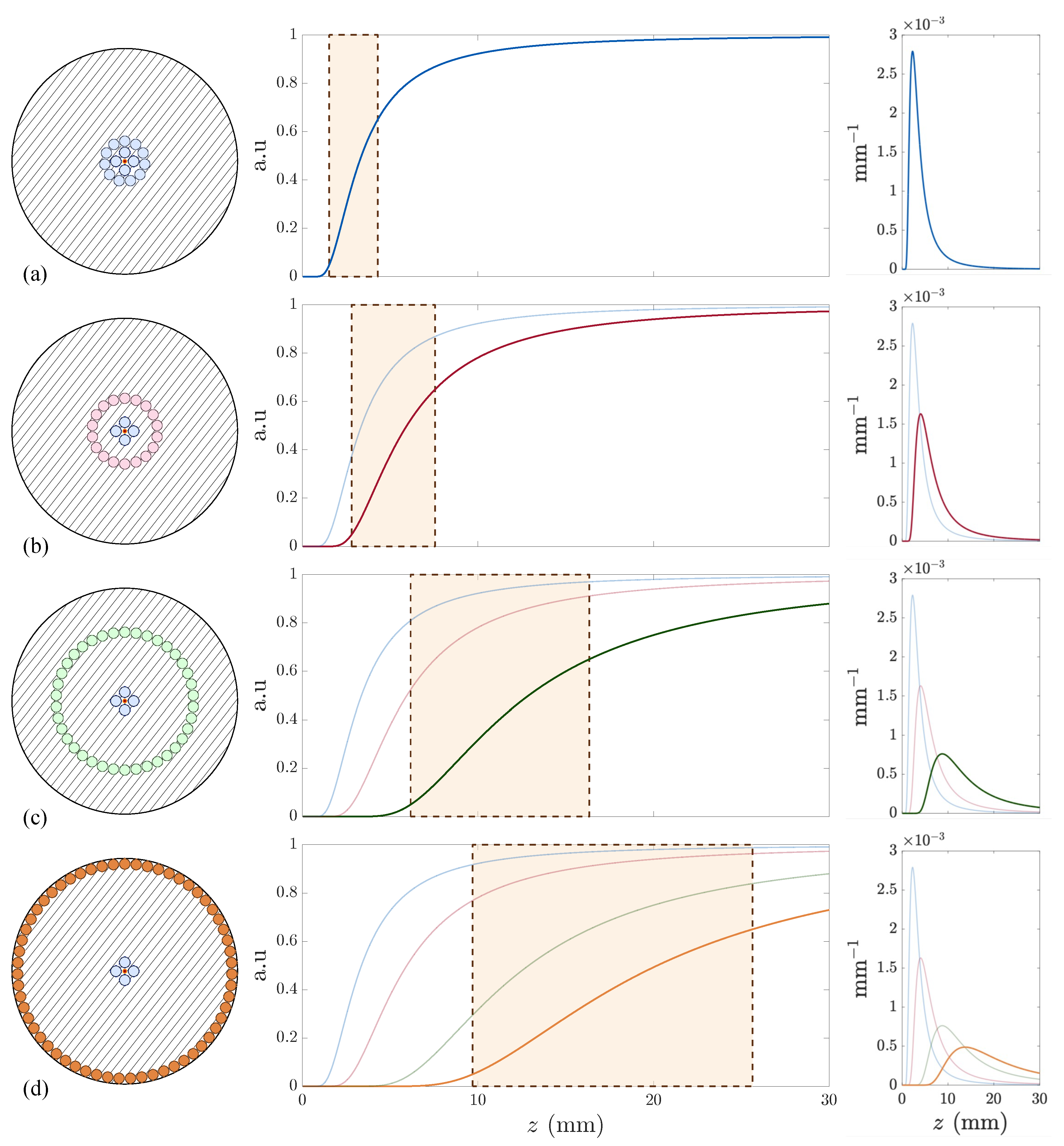
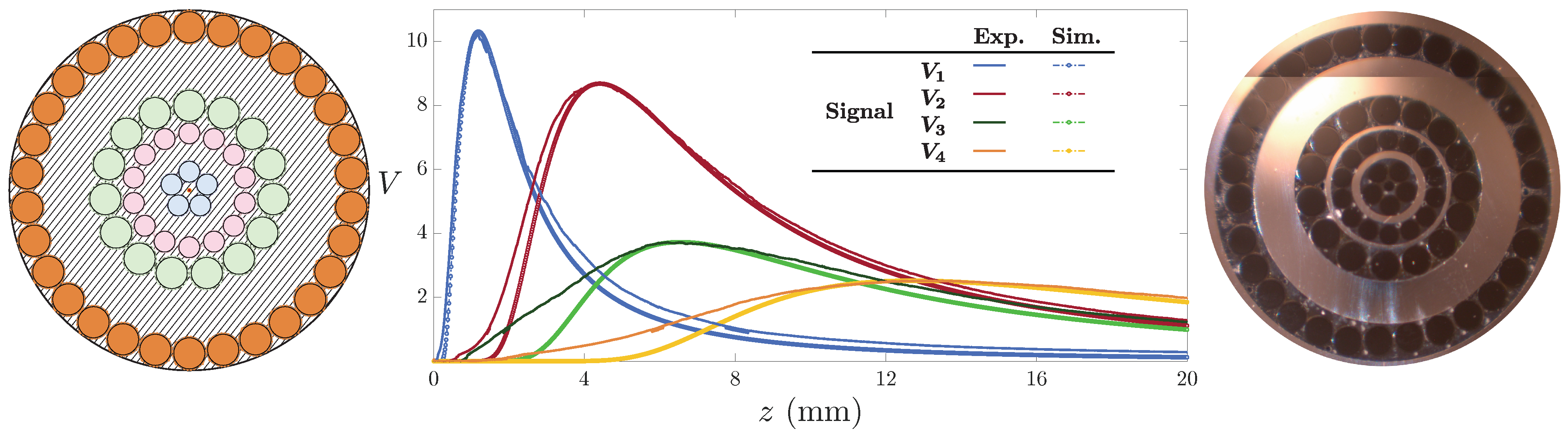
3.4. Tetrafurcated OFDS
4. Experimental Results
4.1. Experimental Set-Up
- Laser source and fiber coupling. The laser output at 660 nm is coupled into the TF at the center of the bundle. The reflected light from the target re-enters the bundle through its RF collections and is converted into voltage signals , , etc., by the photodetectors.
- Target positioning. The target—here a mirror; in-field, a blade tip—is mounted on a motorized linear stage and/or an angular stage to mimic realistic displacement and orientation changes. This allows us to measure the sensor’s response over a range of distances and angles.
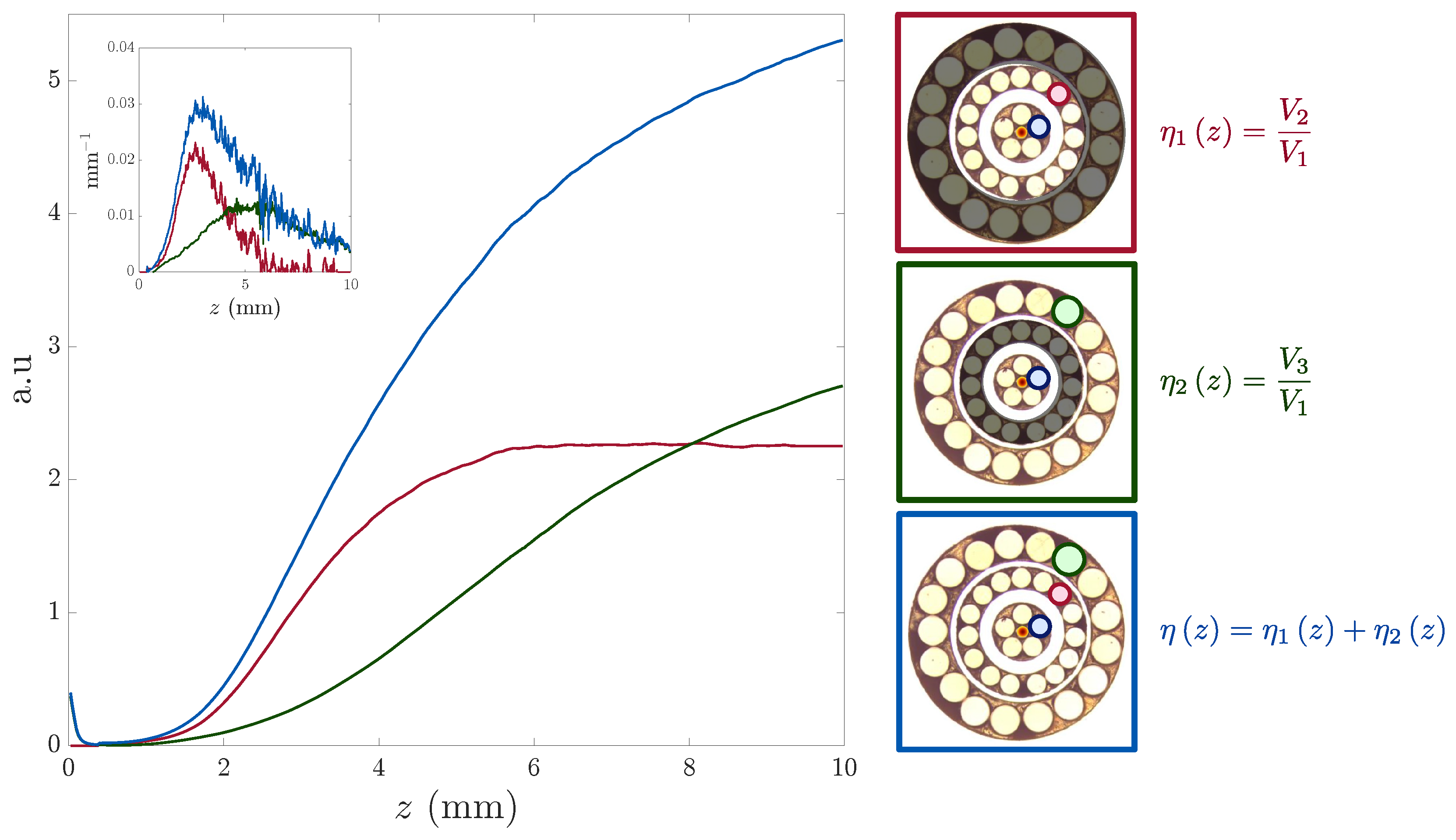
- Signal processing. Each photodetector output voltage is read by the DAQ6510 acquisition card. Data are recorded at each step of the linear or angular motion. As discussed in Section 3, the ratio —or corresponding sums for higher furcation levels—yields a responsivity curve that reflects the distance measurement capability of the OFDS.
4.2. Tetrafurcated Design Validation
4.3. Linearized Working Range: Pentafurcated Design
- Physical constraints: Increasing the number of elements reduces the space available for each fiber within the bundle. This requires precision manufacturing techniques, raising costs and complexity.
- Photodetector requirements: Each RF collection requires a dedicated photodetector, amplifying the cost of the system, its size, and its complexity.
- Bundle size limitations: Aeronautical applications impose strict constraints on the physical size of the sensor due to the limited space available in jet-engine stages.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
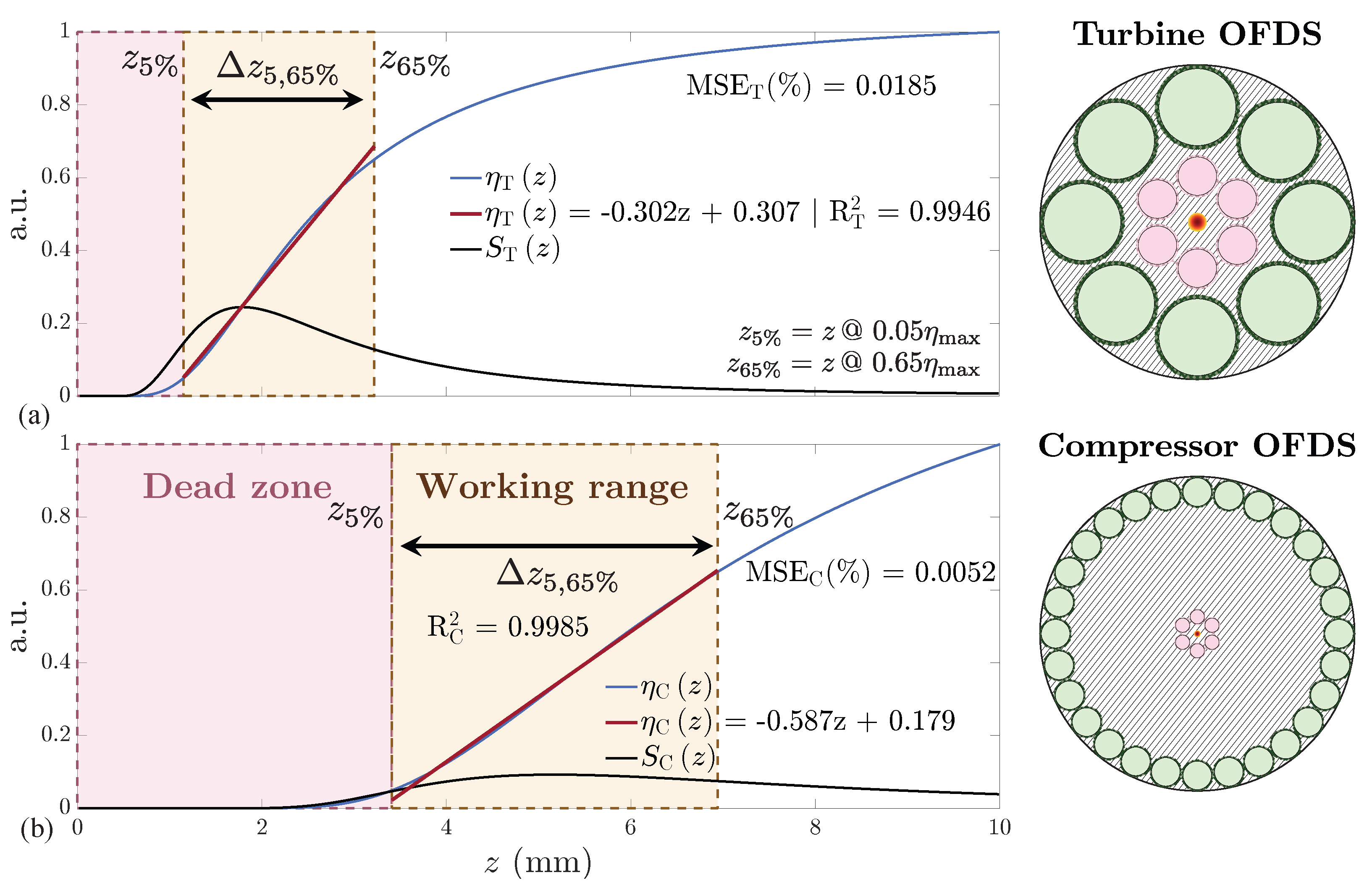
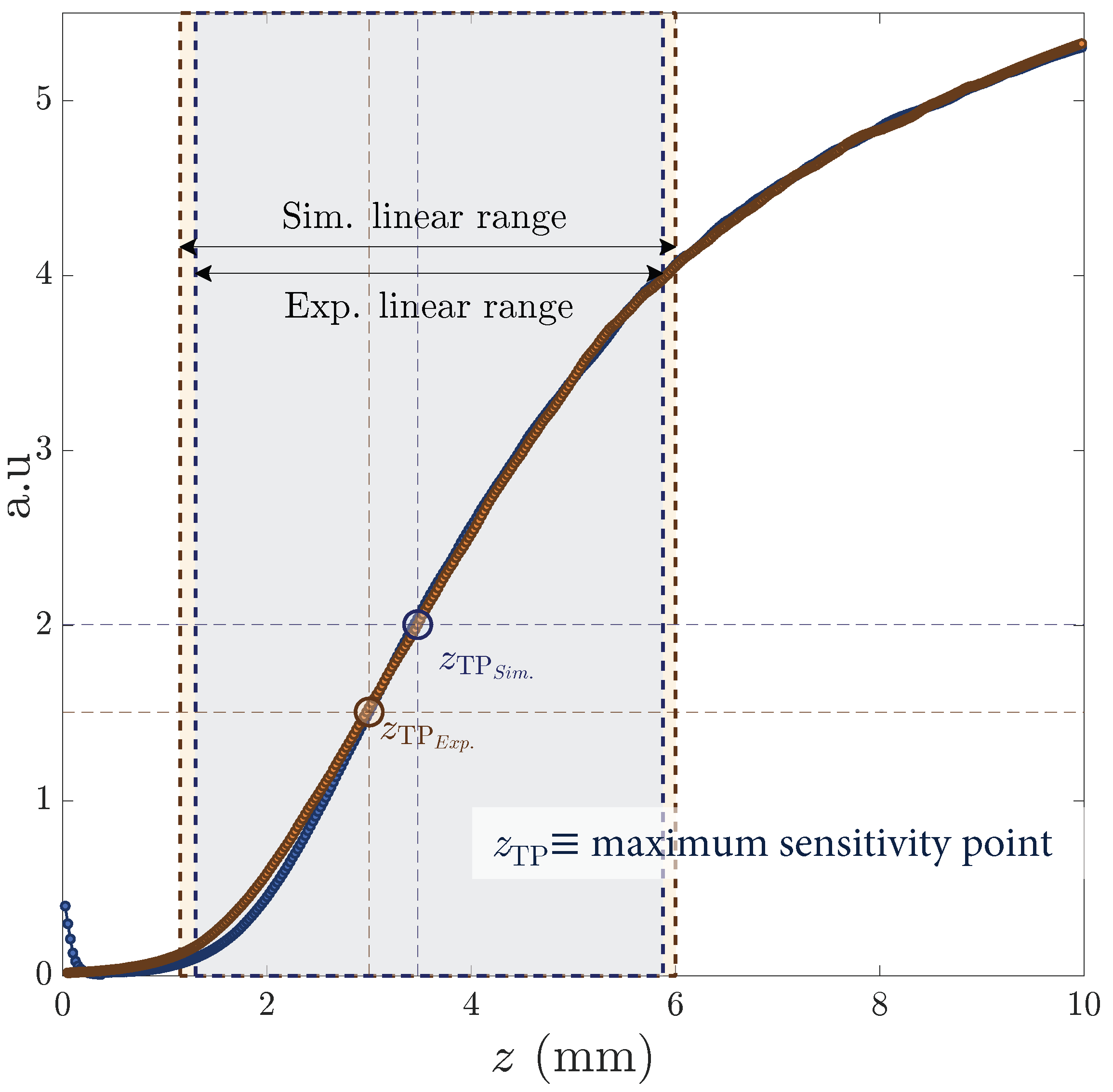
Appendix A. Definitions of the Linear Range
References
- Berkovic, G.; Shafir, E. Optical methods for distance and displacement measurements. Adv. Opt. Photonics 2012, 4, 441–471. [Google Scholar] [CrossRef]
- Sastikumar, D.; Gobi, G.; Renganathan, B. Determination of the thickness of a transparent plate using a reflective fiber optic displacement sensor. Opt. Laser Technol. 2010, 42, 911–917. [Google Scholar] [CrossRef]
- McKay, B.; Barlow, A. The UltraFan Engine and Aircraft Based Thrust Reversing. In Proceedings of the 48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Atlanta, GA, USA, 30 July–1 August 2012. [Google Scholar] [CrossRef]
- Rolls-Royce. UltraFan, The Ultimate TurboFan. Available online: https://www.rolls-royce.com/innovation/ultrafan.aspx (accessed on 20 December 2024).
- Amorebieta, J.; Garcia, I.; Durana, G.; Aldabaldetreku, G.; Zubia, J.; Sáez-Ocáriz, I. Optical fibre-based reflective displacement sensor: Computer modelling and application to impact detection in aeronautical structures. In Proceedings of the SPIE Optical Metrology, Munich, Germany, 25–29 June 2017; p. 103294. [Google Scholar] [CrossRef]
- Wisler, D.C. Loss reduction in axial-flow compressors through low-speed model testing. J. Eng. Gas Turbines Power 1985, 107, 354–363. [Google Scholar] [CrossRef]
- Heath, S.; Imregun, M. A Survey of Blade Tip-Timing Measurement Techniques for Turbomachinery Vibration. J. Eng. Gas Turbines Power 1998, 120, 784–791. [Google Scholar] [CrossRef]
- Ferreira, M.; Rehan, M.; Mishra, V.; KVarshney, S.; Poletti, F.; Nguyen, H.P.T.; Wang, W.; Zhang, Q.; Du, W.; Yu, B.; et al. Roadmap on specialty optical fibers. J. Phys. Photonics 2024, 6. [Google Scholar] [CrossRef]
- Villatoro, J.; Arrizabalaga, O.; Durana, G.; Sáez de Ocáriz, I.; Antonio-Lopez, E.; Zubia, J.; Schülzgen, A.; Amezcua-Correa, R. Accurate strain sensing based on super-mode interference in strongly coupled multi-core optical fibres. Sci. Rep. Nat. Publ. Group 2017, 7, 4451. [Google Scholar] [CrossRef]
- Arrizabalaga, O.; Sun, Q.; Beresna, M.; Lee, T.; Zubia, J.; Velasco Pascual, J.; Sáez de Ocáriz, I.; Schülzgen, A.; Antonio-Lopez, J.E.; Amezcua-Correa, R.; et al. High-performance vector bending and orientation distinguishing curvature sensor based on asymmetric coupled multi-core fibre. Sci. Rep. Nat. Publ. Group 2020, 10, 14058. [Google Scholar] [CrossRef]
- Yerolatsitis, S.; Antonio-Lopez, J.E.; Amezcua-Correa, R.; Kalli, K. Enhancing birefringence in anti-resonant hollow-core fibers. In Proceedings of the Specialty Optical Fibres VIII. SPIE, Strasbourg, France, 7–12 April 2024; Volume PC13001, p. 1300109. [Google Scholar] [CrossRef]
- Sufian, M.A.; Baleine, E.; Geldmeier, J.; Alhalemi, A.; Antonio-Lopez, J.E.; Correa, R.A.; Schülzgen, A. Light Transmission Through a Hollow Core Fiber Bundle. IEEE J. Sel. Top. Quantum Electron. 2024, 30, 4301308. [Google Scholar] [CrossRef]
- Tyumenev, R.; Hammer, J.; Joly, N.Y.; Russell, P.S.J.; Novoa, D. Tunable and state-preserving frequency conversion of single photons in hydrogen. Science 2022, 376, 621–624. [Google Scholar] [CrossRef] [PubMed]
- Pereira, D.; Bierlich, J.; Kobelke, J.; Ferreira, M.S. Double Antiresonance Fiber Sensor for the Simultaneous Measurement of Curvature and Temperature. Sensors 2021, 21, 7778. [Google Scholar] [CrossRef]
- Azkune, M.; Frosch, T.; Arrospide, E.; Aldabaldetreku, G.; Bikandi, I.; Zubia, J.; Popp, J.; Frosch, T. Liquid-Core Microstructured Polymer Optical Fiber as Fiber-Enhanced Raman Spectroscopy Probe for Glucose Sensing. J. Light. Technol. 2019, 37, 2981–2988. [Google Scholar] [CrossRef]
- Arrizabalaga, O.; Castaño, A.; Zugaza, J.L.; Zubia, J. Optimized SARS-CoV-2 Spike Protein Detection via Coupling Coefficient-Driven FFT Analysis in a Peptide-Functionalized Fiber Optic Biosensor. Sens. Actuators B Chem. 2025, 428, 137226. [Google Scholar] [CrossRef]
- Tian, C.; Chen, X.; Ren, Y.; Yang, Y.; Wang, M.; Bai, X. Spectral Characteristics and Displacement Sensing of U-Shaped Single-Mode–Multimode–Single-Mode Fiber Structure. Sensors 2024, 24, 3184. [Google Scholar] [CrossRef] [PubMed]
- Fu, H.; Wu, J.; Zhang, Y.; Zhang, H.; Zhang, W.; Wang, P. Singlemode-Multimode-Singlemode Fiber Structures for Sensing Applications—A Review. IEEE Sens. J. 2021, 21, 1276–1288. [Google Scholar]
- Amorebieta Herrero, J. Optical fiber-based displacement sensor (OFDS). In Advanced Photonic Sensors for Industrial Applications; Zubia, J., Ed.; Universidad del País Vasco—Euskal Herriko Unibertsitatea: Bilbao, Spain, 2021; pp. 11–42. Available online: https://dialnet.unirioja.es/servlet/tesis?codigo=287568 (accessed on 20 December 2024).
- Bilro, L.; Alberto, N.; Pinto, J.L.; Nogueira, R. Optical sensors based on plastic fibers. Sensors 2012, 12, 12184–12207. [Google Scholar] [CrossRef] [PubMed]
- Zubia, G.; Zubia, J.; Durana, G.; Aldabaldetreku, G.; Amorebieta, J. Design and performance analysis of tetrafurcated optical fiber displacement sensors for enhanced range and linearity. In Proceedings of the Photonic Instrumentation Engineering XI, San Francisco, CA, USA, 27 January–1 February 2024; Volume 12893, pp. 199–206. [Google Scholar] [CrossRef]
- García, I.; Beloki, J.; Zubia, J.; Aldabaldetreku, G.; Illarramendi, M.A.; Jiménez, F. An Optical Fiber Bundle Sensor for Tip Clearance and Tip Timing Measurements in a Turbine Rig. Sensors 2013, 13, 7385–7398. [Google Scholar] [CrossRef] [PubMed]
- Durana, G.; Amorebieta, J.; Aldabaldetreku, G.; Zubia, G.; Zubia, J. A tabletop rotor kit as training platform for fiber optic-based sensing. In Proceedings of the Seventeenth Conference on Education and Training in Optics and Photonics: ETOP 2023 (2023), Cocoa Beach, FL, USA, 15–18 May 2023; p. 127231. [Google Scholar] [CrossRef]
- Fernández-Bello, R.; Amorebieta, J.; Beloki, J.; Aldabaldetreku, G.; García, I.; Zubia, J.; Durana, G. Performance Comparison of Three Fibre-Based Reflective Optical Sensors for Aero Engine Monitorization. Sensors 2019, 19, 2244. [Google Scholar] [CrossRef]
- Durana, G.; Amorebieta, J.; Fernandez, R.; Beloki, J.; Arrospide, E.; Garcia, I.; Zubia, J. Design, Fabrication and Testing of a High-Sensitive Fibre Sensor for Tip Clearance Measurements. Sensors 2018, 18, 2610. [Google Scholar] [CrossRef]
- García, I.; Zubia, J.; Berganza, A.; Beloki, J.; Arrue, J.; Illarramendi, M.A.; Mateo, J.; Vázquez, C. Different Configurations of a Reflective Intensity-Modulated Optical Sensor to Avoid Modal Noise in Tip-Clearance Measurements. J. Light. Technol. 2015, 33, 2663–2669. [Google Scholar] [CrossRef]
- Zubia, G.; Zubia, J.; Amorebieta, J.; Aldabaldetreku, G.; Durana, G. A New Method to Design Trifurcated Optical Fiber Displacement Sensors. IEEE Sens. J. 2024, 24, 1532–1545. [Google Scholar] [CrossRef]
- Zubia, G.; Zubia, J.; Amorebieta, J.; Aldabaldetreku, G.; Durana, G. In-depth analysis of optical fiber displacement sensor design process. J. Opt. 2024, 26, 105701. [Google Scholar] [CrossRef]
- Zubia, G.; Durana, G.; Amorebieta, J.; Aldabaldetreku, G.; Zubia, J. Theoretical method for the design of bifurcated fiber optic displacement sensors. In Conectando la Academia y la Industria; Editorial Universidad de Sevilla: Seville, Spain, 2024; p. 445. [Google Scholar] [CrossRef]
- Zubia, G.; Amorebieta, J.; Zubia, J.; Durana, G. An algorithm to optimize the optical sensor design for tip clearance and tip timing measurements. In Proceedings of the Optical Sensing and Detection VII. SPIE, Strasbourg, France, 3 April–23 May 2022; Volume 12139, pp. 194–200. [Google Scholar] [CrossRef]
- Zubia, G.; Zubia, J.; Durana, G.; Aldabaldetreku, G.; Amorebieta, J. Mathematical modeling and experimental validation of optical fiber sensors for simultaneous measurement of angular and linear displacements. In Proceedings of the Optical Sensing and Detection VIII. SPIE, Strasbourg, France, 7–12 April 2024; Volume 12999, pp. 40–47. [Google Scholar] [CrossRef]
- Elrawashdeh, Z.; Prelle, C.; Lamarque, F.; Revel, P.; Galland, S. Optimizing Algorithm for Existing Fiber-Optic Displacement Sensor Performance. Sensors 2024, 24, 448. [Google Scholar] [CrossRef] [PubMed]
- Suganuma, F.; Shimamoto, A.; Tanaka, K. Development of a differential, optical, reflective displacement sensor by use of a multilayered waveguide. Appl. Opt. 2000, 39, 5745–5749. [Google Scholar] [CrossRef] [PubMed]
- Yasin, M.; Harun, S.W.; Kusminarto; Karyono; Zaidan, A.H.; Thambiratnam, K.; Ahmad, H. Design and Operation of a Concentric-Fiber Displacement Sensor. Fiber Integr. Opt. 2009, 28, 301–309. [Google Scholar] [CrossRef]
- Patil, S.S.; Shaligram, A.D. Retro-Reflective Fiber Optic Displacement Sensor for Performance Optimization Using Taguchi Method. J. Sens. Technol. 2020, 10, 1–13. [Google Scholar] [CrossRef]
- Harun, S.W.; Yasin, M.; Hangzhou, Y.; Ahmad, H. Fiber Optic Displacement Sensors and Their Applications. In Fiber Optic Sensors; Moh. Yasin, S.W.H., Arof, H., Eds.; IntechOpen: London, UK, 2012. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, Y.; Jin, M. Improvement of measurement range of optical fiber displacement sensor based on neutral network. Optik 2014, 125, 126–129. [Google Scholar] [CrossRef]
- Wego, A.; Geske, G. Fiber Optic Displacement Sensor with New Reflectivity Compensation Method. J. Sens. Technol. 2013, 3, 21–24. [Google Scholar] [CrossRef]
- Wenlong, D. Design of reflective optical fiber displacement sensor using double optical paths. Comput. Model. New Technol. 2014, 18, 1438–1442. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| OFDS Type | Model | Slope | ||||||
|---|---|---|---|---|---|---|---|---|
| (mm) | (mm) | (mm) | (a.u.) | (mm−1) | ||||
| Trifurcated | a | − | ||||||
| b | − | |||||||
| c | − | |||||||
| d | − | |||||||
| Tetrafurcated | - | |||||||
| OFDS | RF Collections | Slope | ||||
|---|---|---|---|---|---|---|
| (mm) | (a.u.) | (mm−1) | ||||
| Experimental | Trifurcated | & | ||||
| & | ||||||
| Tetrafurcated | & + & | |||||
| Modelization | Tetrafurcated | & + & | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zubia, G.; Zubia, J.; Amorebieta, J.; Aldabaldetreku, G.; Zubia, A.; Durana, G. High-Performance Optical Fiber Displacement Sensor with Extended Linear Range and Sensitivity. Sensors 2025, 25, 418. https://doi.org/10.3390/s25020418
Zubia G, Zubia J, Amorebieta J, Aldabaldetreku G, Zubia A, Durana G. High-Performance Optical Fiber Displacement Sensor with Extended Linear Range and Sensitivity. Sensors. 2025; 25(2):418. https://doi.org/10.3390/s25020418
Chicago/Turabian StyleZubia, Gorka, Joseba Zubia, Josu Amorebieta, Gotzon Aldabaldetreku, Asier Zubia, and Gaizka Durana. 2025. "High-Performance Optical Fiber Displacement Sensor with Extended Linear Range and Sensitivity" Sensors 25, no. 2: 418. https://doi.org/10.3390/s25020418
APA StyleZubia, G., Zubia, J., Amorebieta, J., Aldabaldetreku, G., Zubia, A., & Durana, G. (2025). High-Performance Optical Fiber Displacement Sensor with Extended Linear Range and Sensitivity. Sensors, 25(2), 418. https://doi.org/10.3390/s25020418