
Tracking Boats on Amazon Rivers—A Case Study with the LoRa/LoRaWAN

 , and
, and
Abstract
:1. Introduction
- Development of a new hardware platform with a LoRa network and two (2) SiPs. One SiP is used for transmission, and the other SiP is used for data reception. In this way, the boat is ready to transmit and receive LoRa data packets simultaneously;
- Development of a new end-node-to-end-node communication protocol called the LoRa Protocol Proprietary (LPP), designed to send configurable commands such as a location table, modulation, routing, source DevEUI, destination DevEUI, and port. Additionally, it provides reliability in communication between devices through encryption;
- Evaluation of the data transfer capacity in a LoRa network in communication scenarios: (i) boat with gateway and (ii) boat with the boat, considering the performance metrics: maximum range, maximum time, received signal strength indication (RSSI), and signal-to-noise ratio (SNR).
2. Related Works

| Parameters | Santos et al. [32] | Ortiz et al. [64] | Parri et al. [69] | Proposed Work |
|---|---|---|---|---|
| Scenery | remote communities | urban area | urban area | urban area and remote communities |
| Vehicle | Boat | Car | Boat | Boat |
| Architecture | End Node to End Node | End Node to End Node | End Node to Gateway | End Node to End Node and End Node to Gateway |
| Chip | SX1276 | SX1276 | SX1276 and RAK831 | SX1262 |
| Technology | TTGO T-BEAM ESP32 | LoRa RF 96 | B-L072Z-LRWAN1 | SiP HTLRBL32L |
| Approach | Experimentation | Experimentation and simulation | Experimentation | Experimentation |
| Description | SX1262 | SX1276 |
|---|---|---|
| Data transfer rate | 300 (kbps) | 100 (kbps) |
| Range | 15 (km) | 10 (km) |
| Power supply | 6 (mA) | 10 (mA) |
| LoRa Tx | −148 (dBm) | −142 (dBm) |
| LoRa Rx | 22 (dBm) | 20 (dBm) |
3. LoRa/LoRaWAN and the SiP iMCP HTLRBL32L
- Bandwidth (BW): The BW specifies the frequency range in which the network operates. The BW is set at 125 kHz, 250 kHz, or 500 kHz.
- The spreading factor (SF) determines the number of symbols representing a single bit of information, ranging from 6 to 12 in LoRa Modulation and 7 to 12 in the Lorawan Protocol.
- Coding rate (CR): Error checking or correction is performed on the message. The defined values for CR are 4/5, 4/6, 4/7, or 4/8. Increasing the CR provides more protection and increases the number of bits of air.
4. Hardware Platform
4.1. Overview
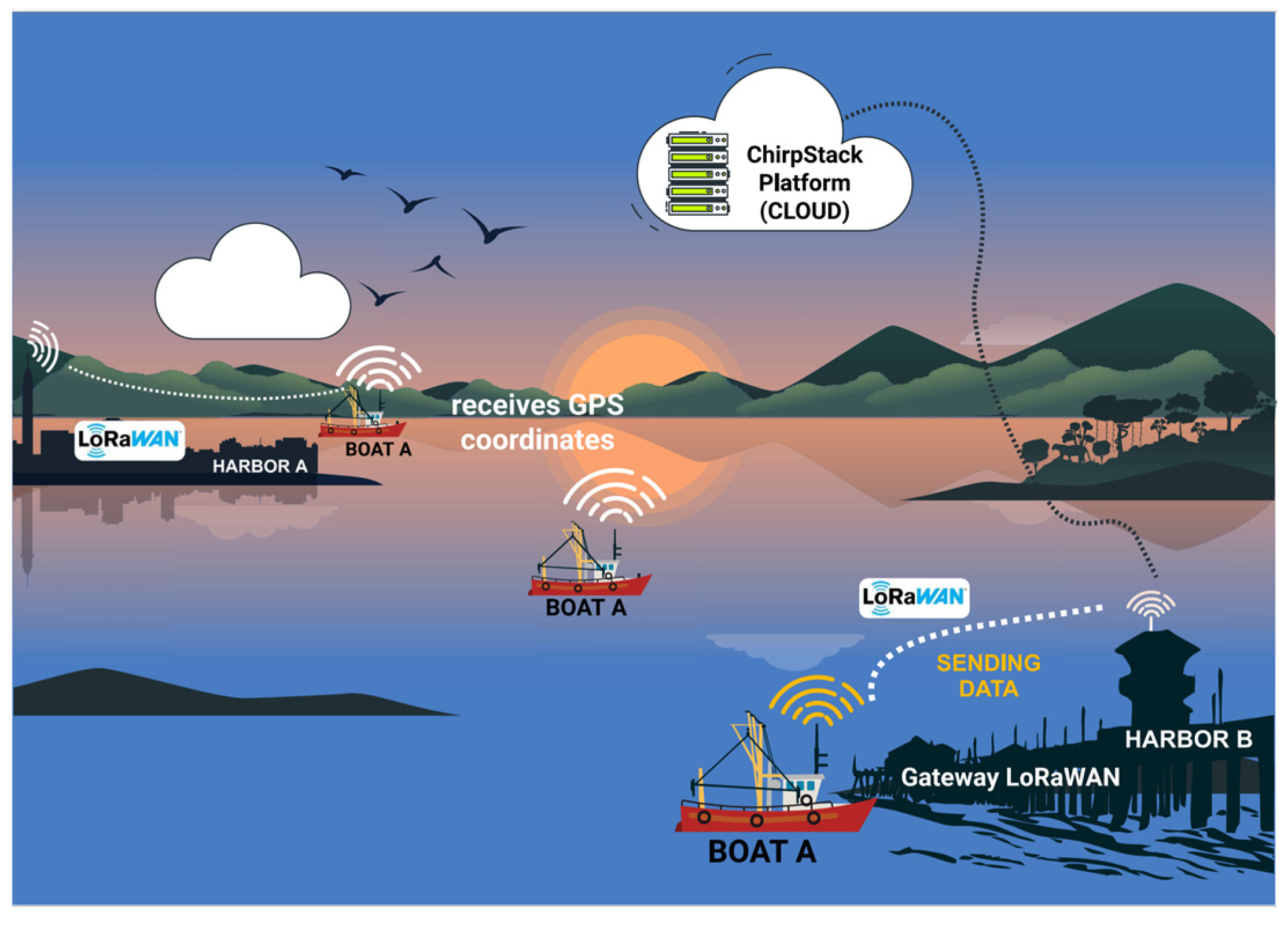
- Boat A leaves port A and, during the journey, receives its GPS position and stores it. Boat A makes a complete journey without encountering another boat. When it arrives at port B (destination port), it transmits all the data stored during the trip to the port B gateway with LoRaWAN, as shown in Figure 3.
- Boat A leaves port A and meets boat B during the journey, i.e., the boats are within the data communication coverage range. Boat A transmits its stored data and receives data from boat B (Figure 4). The data transmitted and received during data communication between the devices attached to the boats are the boat’s identification, the positions the boat has passed, and the date and time of the positions along the route. If boat A communicates with a fixed infrastructure on the riverbed before boat B, the data from boat A will be downloaded onto the infrastructure. If boat B communicates with the same fixed infrastructure, boat B’s data will be discarded because there is a redundancy of information.
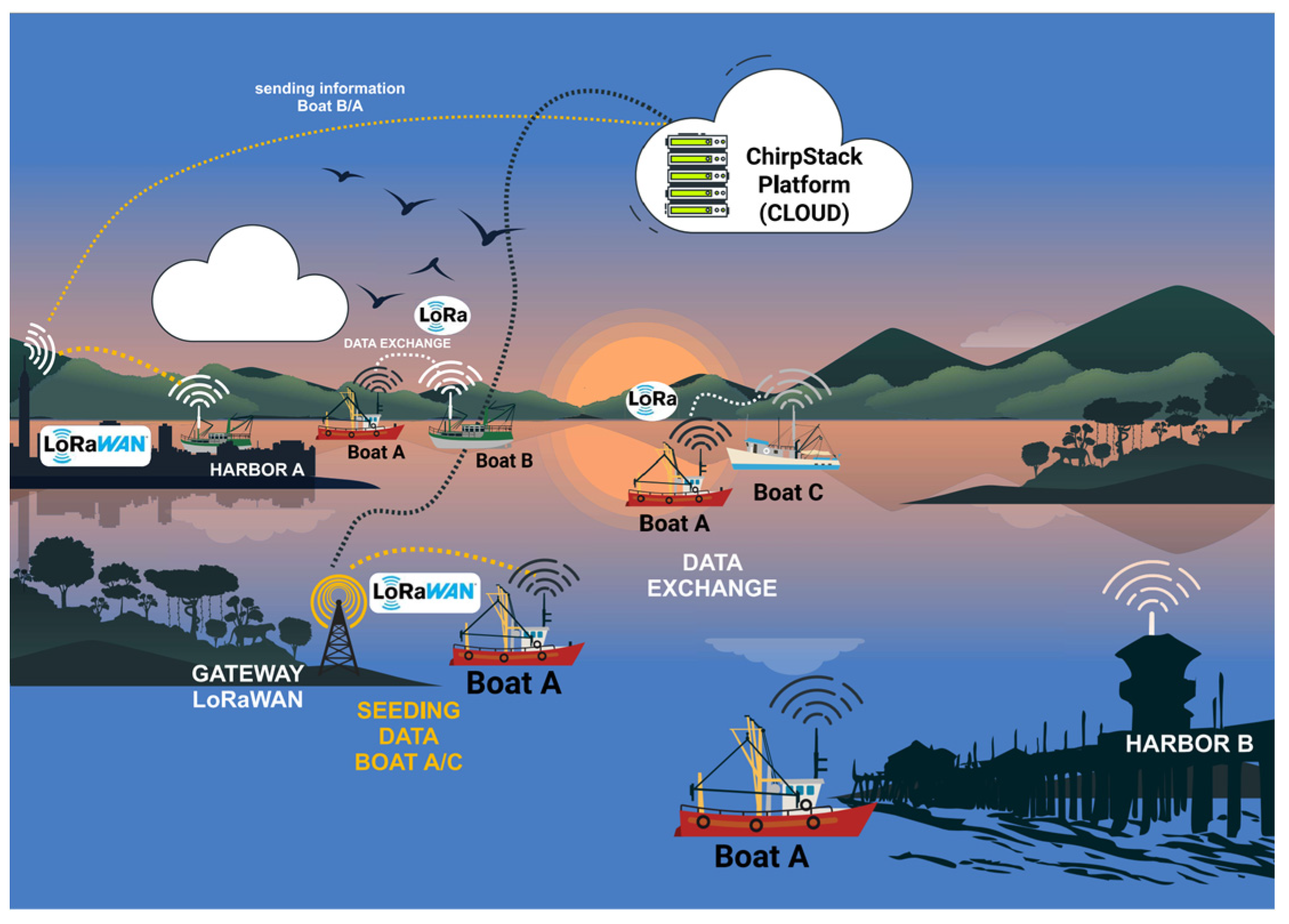
- Boat A leaves port A, meets boat B, and exchanges information. Boat A continues its journey and meets boat C. In other words, boat A sends information to boat C—its information—and that of boat B, which it meets on its route. (as illustrated in Figure 5). If boat A arrives first at the fixed infrastructure along the riverbed, boat A downloads the data from boats B and C onto the ChirpStack platform. As the information from boats B or C is up to date, if boats B or C download the data, it will be discarded because the information is redundant.
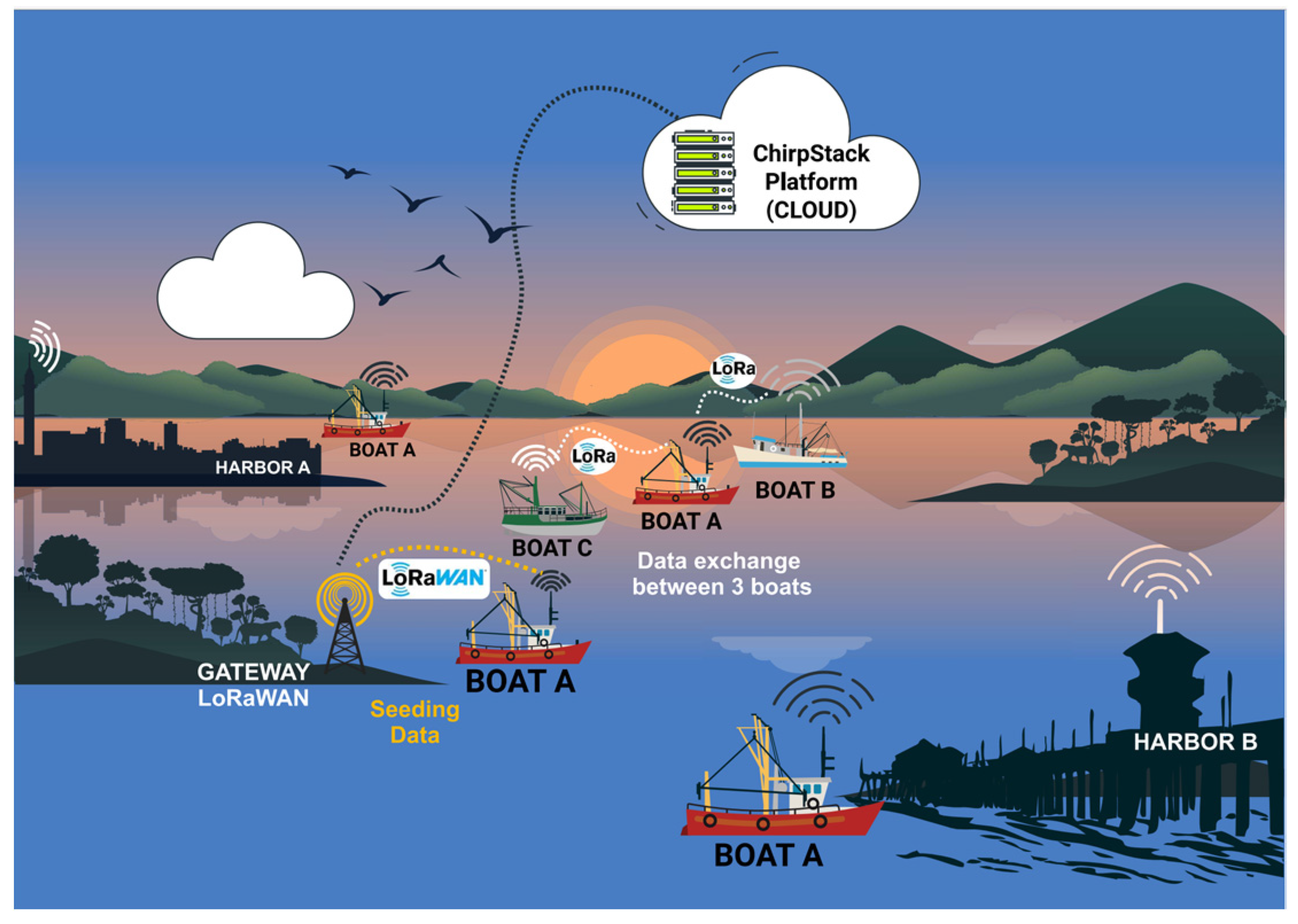
- Boat A leaves port A and simultaneously meets boats B and C. Boats A, B, and C exchange information about their routes with each other. Assuming that boat A finds a fixed infrastructure along the riverbed, it downloads the data from the three boats onto the ChirpStack platform, as illustrated in Figure 6.
4.2. Requirements
- (a)
- GPS: The hardware must connect to a GPS to obtain the boat’s location information (latitude, longitude, speed, steering angle). The GPS antenna can be internal or external and must guarantee the maximum possible signal coverage along the rivers of the western Amazon.
- (b)
- LoRa Radio: Communication between the boat and the infrastructure fixed on the riverbed (LoRaWAN Gateway) and communication between boats must be carried out via LoRa technology via the HTLRBL32L SiP.
- (c)
- Bluetooth Radio: The hardware must provide a local connection (near the boat) via Bluetooth Radio via the HTLRBL32L SiP. This connection configures the system, updates the firmware, and extracts data from nonvolatile memory. The hardware must include a connector for the external antenna of the Bluetooth radio.
- (d)
- Nonvolatile memory: The hardware must have nonvolatile memory to enable the boat route to be recorded. The recording interval for location points must be configurable.
- (e)
- Power Supply: The hardware must receive direct current (DC) power from the boat, from which other voltages required for the various functional blocks will be generated via voltage regulators.
- (f)
- Microcontroller: The HTLRBL32L SiP will be used, with two (2) processing units on the board.
- (g)
- Communication Interfaces: The hardware must provide communication interfaces compatible with the peripherals: (i) GPS and (ii) nonvolatile memory (SPI or I2C).
- (h)
- Connector for writing and debugging: the hardware should provide a connector for writing and debugging the microcontroller(s) firmware.
- (i)
- Human Machine Interfaces (HMI): The hardware must have a human–machine interface with the following elements for visual indication: (i) LED for power indication, (ii) LED for activity indication, (iii) LED for LoRa, Bluetooth, and GPS connection status indication, and (iv) LED for fault indication.
- (j)
- Watch-Dog-Timer (WDT) and automatic board reset: the hardware must have an automatic reset of the entire system in the event of a persistent fault to recover without the need for operator intervention, keeping its functionalities available.
- (k)
- Real-time clock (RTC): The hardware must have a mechanism capable of keeping the system’s date and time updated at all times, even in the absence of power.
- (l)
- Power backup: The hardware must provide a connector for the secondary power supply via an external battery to maintain a stable power supply in case of a failure in the boat’s primary power supply. The hardware must include a backup battery charging circuit. The nonfunctional requirements address the characteristics or qualities of the system and are as follows:
- (a)
- Connector/Test points: The board provides test points for the main signals and interfaces in its layout.
- (b)
- Usability: The hardware should, whenever possible, be easy to operate and install.
- (c)
- Reliability: The hardware should be capable of operating indefinitely and maintaining its functionalities intact, provided that it is kept within the specified operating conditions.
- (d)
- Performance: The hardware must be able to handle the peripherals on the card and respond to requests from the interfaces provided, regardless of the order in which they occur, sending a response back to the user.
- (e)
- Operating range: A survey of the temperature and humidity ranges along the rivers of the Amazon should be carried out to establish the operating limits of the hardware.
- (f)
- Encapsulation: The mechanical encapsulation material and shape must be designed so that the hardware performance is not affected.
4.3. Base Plate
4.4. Block Diagram
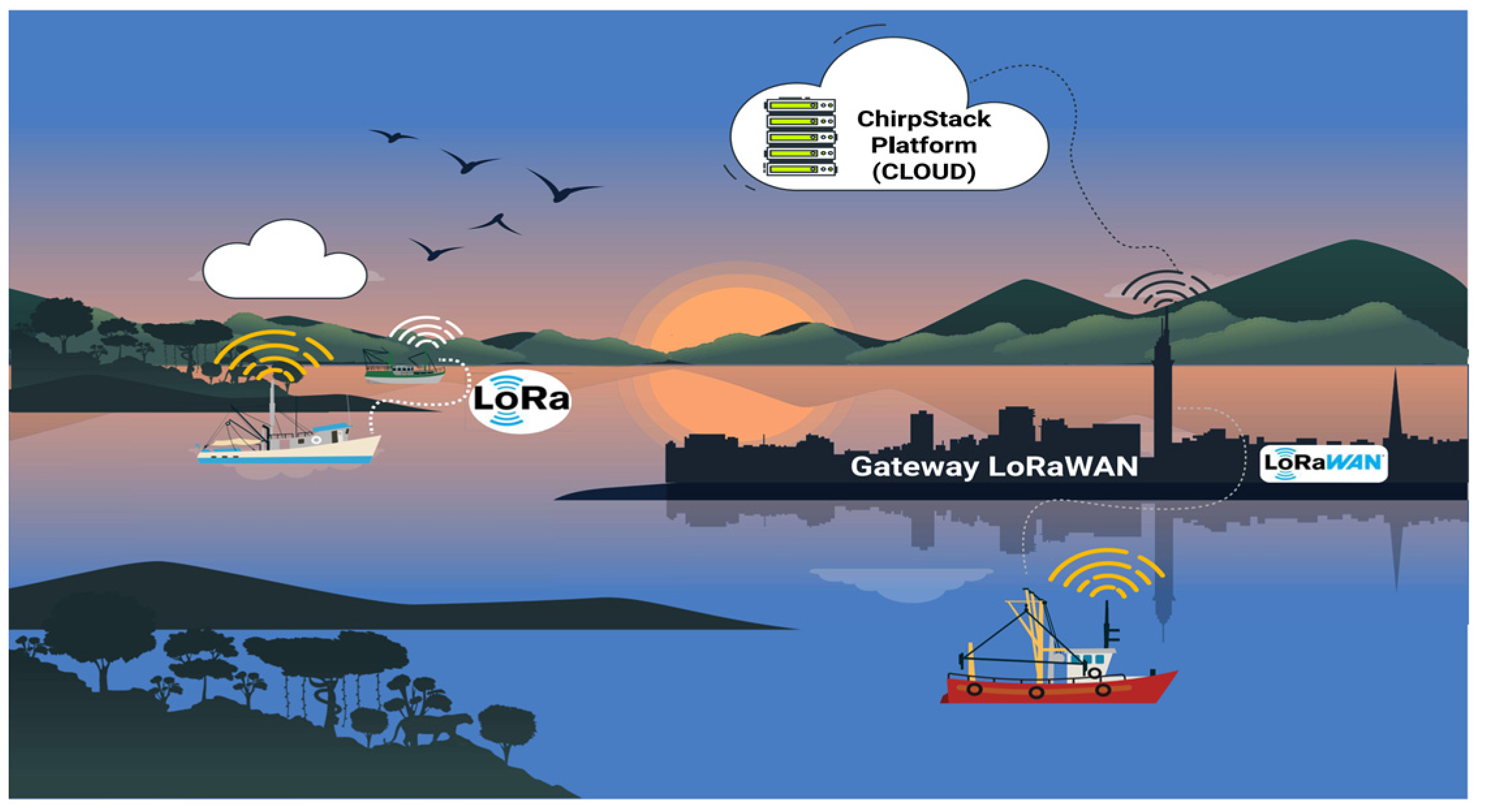
- Boat: The hardware platform is responsible for sending and receiving location information (latitude, longitude, speed, angle, date, and time), both from the boat where the hardware platform is installed and from other boats nearby, and then sending it to the LoRaWAN gateway;
- The LoRaWAN gateway is responsible for forwarding data packets between the Boats and the cloud computing service. The messages from the boats are sent to the LoRaWAN gateway, which checks the connection to the cloud and sends the data to persist in ChirpStack;
- ChirpStack server: The LoRaWAN server is responsible for data persistence. When a packet arrives at ChirpStack, an event is triggered, sending the data for persistence in the MariaDB database. The data are stored in this database for use in the web application.
4.5. LPP Protocol
- (a)
- Delivery Control and Reliability—LPP has no delivery control, making it a simple and lightweight solution for communications where guaranteed delivery of each packet is not a priority. It is ideal for communication between boats in remote areas, as it does not waste resources on resending lost packets, keeping the connection as constant as possible.
- (b)
- Application Environment—LPP is optimized for low-bandwidth networks, such as those found in remote environments. It is especially useful in remote sensing contexts, where constant communication is more important than the exact delivery of each packet. UDP, on the other hand, is geared towards IP networks, such as the Internet, and is used in a wide variety of applications, from gaming and video streaming to IoT sensor communication on Wi-Fi or Ethernet networks. However, it is not suitable for LoRa networks because it does not take into account their bandwidth and range limitations.
- (c)
- Power Consumption and Bandwidth—LPP consumes little power, making it more efficient for devices with long-lasting batteries. Thus, LPP maximizes range, even with low bandwidth. While UDP is lighter than TCP, it is not as optimized for low-power devices. It assumes the use of networks with more bandwidth, so it is not ideal for LoRa networks, where power consumption and data transmission capacity are more limited.
- (d)
- Development and Customization—LPP is adapted to rustic and specific conditions, such as remote river environments, where prioritizing the simplicity and durability of the system is more important than flexibility of use in different networks. UDP, on the other hand, allows easy integration into various applications and can be combined with other protocols but needs additional customization for efficient use in LoRa networks.
- -
- MHDR: Field containing a header indicating the type of LPP message. Currently, it only has the location sending message type, but it can be expanded to up to 255 different message types. FHDR: Field containing the source and destination addresses of an LPP message, which can be used when it is necessary to send unicast messages, that is, from a source to a single destination, with the destination address set to broadcast by default;
- -
- Fport: Field containing the port information, together with the MHDR, which can be an option to scale more types of messages;
- -
- LPP Payload: Field containing the useful data transmitted in an LPP message; for example, in the Location Send message, this field will contain the Latitude, Longitude, Speed, Date, and Time information;
- -
- MIC: Field containing the integrity verification mechanism for LPP messages. This field is optional since a CRC field is already contained in the LoRa modulation, so the MIC would serve as a second integrity mechanism.
- (a)
- Signal Interference—The Amazon is known for its dense vegetation cover, uneven terrain, and variable weather conditions, which can cause signal interference. Conventional protocols such as Wi-Fi and 4G have difficulty maintaining signal integrity over long distances and in environments with physical obstructions. LPP solves this with a robust modulation of LoRa technology, as it uses a modulation technique called chirp spread spectrum (CSS), which is highly resistant to interference and allows data transmission at low power frequencies. This is ideal for crossing physical obstacles like trees and hills without losing signal quality. Furthermore, this technology has a long range and low frequency, making it less susceptible to environmental interference and able to penetrate dense vegetation better, providing a much greater range than high-frequency protocols.
- (b)
- Latency and Communication Delays—In remote regions such as the Amazon, where connectivity to the communication infrastructure is limited, communication delays are frequent, especially in satellite-based networks. For applications involving real-time monitoring, such as boat tracking and environmental monitoring, this latency can compromise the effectiveness of the data. LPP solves this problem by transmitting data directly between devices (point-to-point), eliminating the need for a centralized infrastructure. This drastically reduces latency, as data do not need to pass through multiple network layers before being received. In addition, LPP automatically switches to LoRaWAN mode when it detects an available infrastructure. This allows the device to use long-range networks without constantly relying on them, reducing the need for retransmissions and improving efficiency.
- (c)
- Energy Consumption and Sustainability—Most conventional communication protocols require high energy consumption to operate over long distances or in hard-to-reach environments. Energy consumption is a significant concern in Amazon, which has a limited infrastructure. LPP was designed to be highly energy efficient. It transmits data only when necessary, with configurable and random intervals, saving energy and extending the battery life of devices. Thus, instead of maintaining a constant transmission, LPP uses random transmission intervals and a mechanism for periodically checking the LoRaWAN infrastructure. This reduces energy use compared to protocols that always maintain an active connection.
- (d)
- Limited Connectivity to LoRaWAN Infrastructure—LoRaWAN gateways can be sporadic and distant in the Amazon. Protocols that rely exclusively on this infrastructure may fail to maintain communication in areas beyond the reach of the gateways. LPP can operate autonomously between devices in point-to-point mode (LPP Mode), i.e., without needing a LoRaWAN infrastructure. This allows devices to communicate directly with each other, sending position updates or collected data, even in areas without network coverage. When a LoRaWAN gateway is detected, LPP automatically switches to this mode, allowing the data stored on the SD card to be uploaded to the central infrastructure. This automatic reconnection system is effective in locations where network coverage is intermittent.
- (e)
- Data Reliability and Robustness in Harsh Environments—Conventional protocols may not have security mechanisms to ensure that transmitted data are received and processed. Regarding environmental monitoring and boat tracking, data integrity and reliability are crucial. LPP requires an acknowledgment for each transmitted packet, ensuring that the network server has received the data before proceeding with the transmission of the next packet. This minimizes data loss and increases the reliability of communications. Data can be temporarily stored on an SD card inside the device, ensuring that critical information is not lost even if communication with the infrastructure temporarily fails. When the connection to the LoRaWAN network is re-established, the data are sent to the infrastructure.
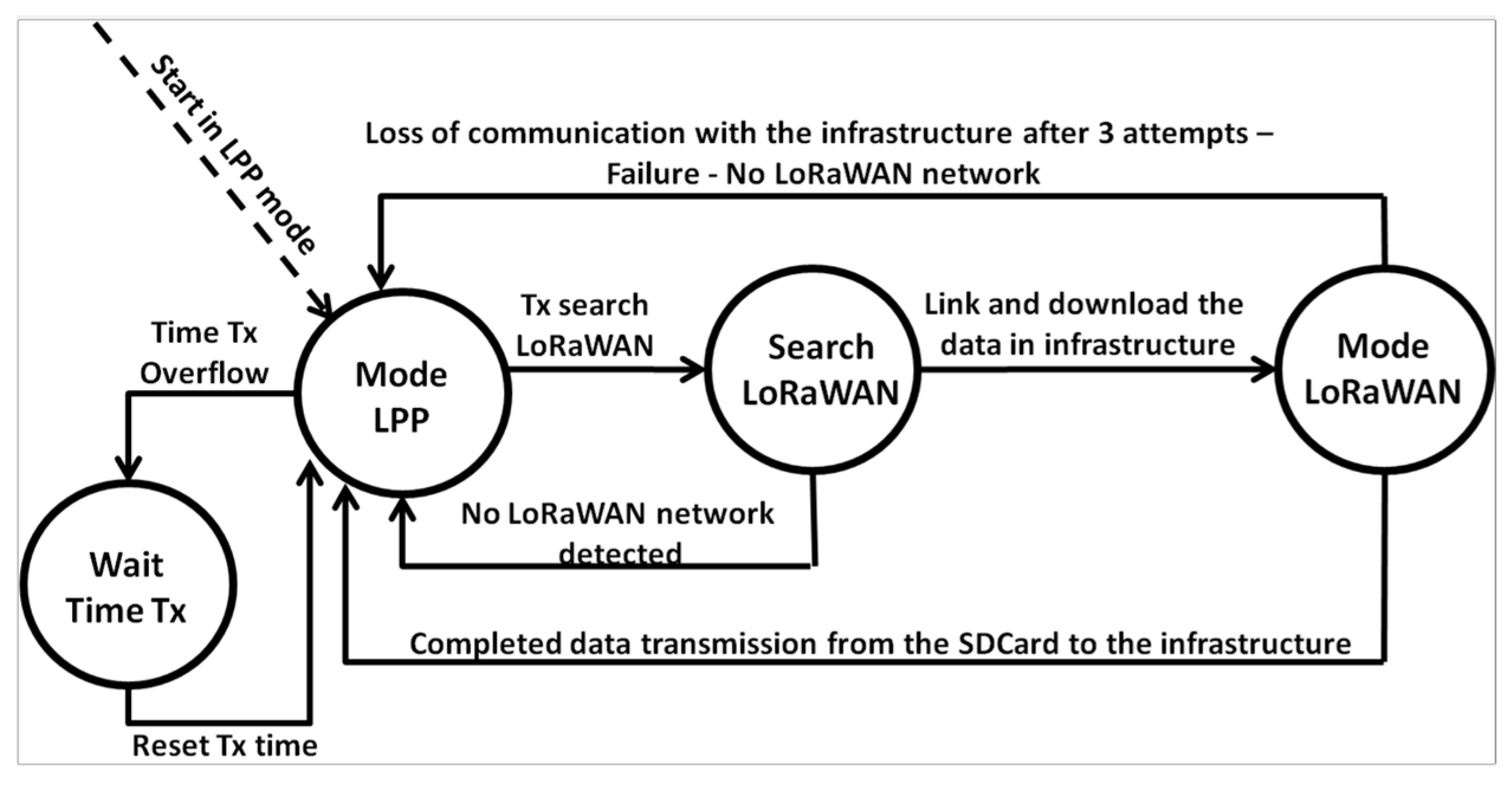
4.6. Firmware
- Step 1: The Tx transmits the position of the boat obtained by the GPS via the LPP protocol periodically, and the period is generated randomly (interval of 5 to 12 s, with increments every 0.5 s). At the same time, as transmitting the boat’s position, the Tx checks when to switch operating modes, which are LPP or LoRaWAN. LoRaWAN mode identifies a LoRaWAN gateway within the range of Tx. Importantly, the search period for a LoRaWAN infrastructure is configurable and can be up to 300 s (5 min). The default value is 60 s (1 min);
- Step 2: If there is no response from a LoRaWAN gateway, the Tx returns to LPP operating mode and continues transmitting its position to other boats;
- Step 3: If the LoRaWAN network is found, Tx starts transmitting the data received from other boats and stored on the SD card;
- Step 4: If communication with the LoRaWAN network is lost during data transmission, after three attempts, the Tx returns to LPP operating mode and continues transmitting its position until the LoRaWAN network is detected again. For each packet sent to the network server, a confirmation downlink must be received by the Tx to send the next packet;
- Step 5: If communication with the LoRaWAN network is maintained during the transmission of all the data stored on the SD card, at the end of the transmission, Tx returns to LPP mode, and the process is repeated. Importantly, the SD card data that have been transmitted are deleted from the card once the network server has confirmed that it has been received.
- Step 1: Rx starts in LPP mode and receives messages from other boats within range;
- Step 2: If a message is received, the Rx sends this message to the Tx via IPCP (Internet Protocol Control Protocol) communication, which is recorded on the SD card, the file corresponding to the boat that sends the message. The IPCP protocol is responsible for control between the two microcontrollers via the serial port.
- Step 3: If a problem occurs when the message is received, it is discarded by Rx.
5. Experiments
5.1. Environment and Scenarios
- Communication between a boat and a fixed infrastructure on land;
- Communication between end devices.
- (a)
- Antenna type: The type of antenna influences electromagnetic radiation levels, depending on the emission power and gain of the antennas. The aim is to maximize the signal performance of the digital antenna, which is suitable for receiving signals from the LoRa network.
- (b)
- Antenna location: Antenna positioning is essential for maximizing radio transmission coverage, obtaining the maximum range, and avoiding interference from obstacles. The recommendation is to position the antennas in higher places, such as buildings, towers, and trees, to prevent barriers ahead.
- (c)
- Interference in signal transmission and reception: Physical obstacles such as dense forests and houses can obstruct the direct line of sight between the transmitting and receiving devices, limiting communication capacity. As a wireless technology, LoRaWAN is subject to radio frequency interference, which can affect the quality and stability of the data communication link, i.e., network performance. To improve the signal, it is recommended that the gateways be installed in elevated locations (tops of buildings or towers) to reduce the number of obstacles between the transmitter and the receiver. In areas with many obstacles, increasing the number of gateways to cover blind spots and improve the network’s overall coverage is essential. In addition, in the point-to-point communication scenario, directional antennas can focus the signal in a specific direction, reducing interference and increasing the range.
- (d)
- Weather conditions: The ambient temperature was 35 °C, the relative humidity was 76%, the wind speed ranged from 0 to 5 km/h, the current speed of the Negro River was 2 km/h, and that of the Solimões River was 4 km/h.
- (e)
- Vegetation Density—Dense vegetation (forests, plantations) can absorb and attenuate the LoRa signal, reducing the range. Therefore, placing the antennas above the treetops can prevent the signal from being absorbed by vegetation. A high spreading factor (such as SF 12) is also recommended, which increases the range, although it reduces the data rate.
5.1.1. Communication Between a Boat and a Fixed Infrastructure on Land
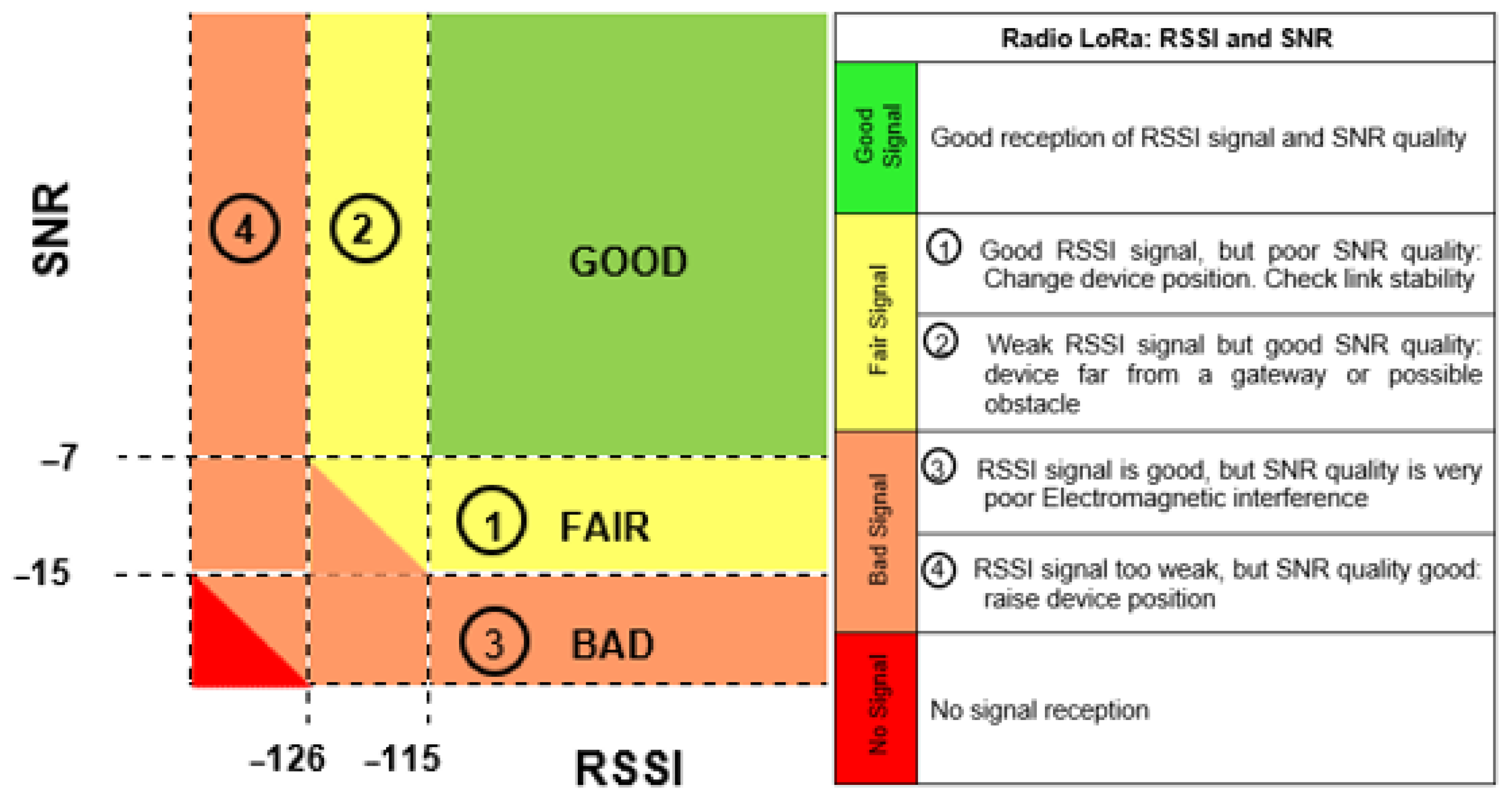
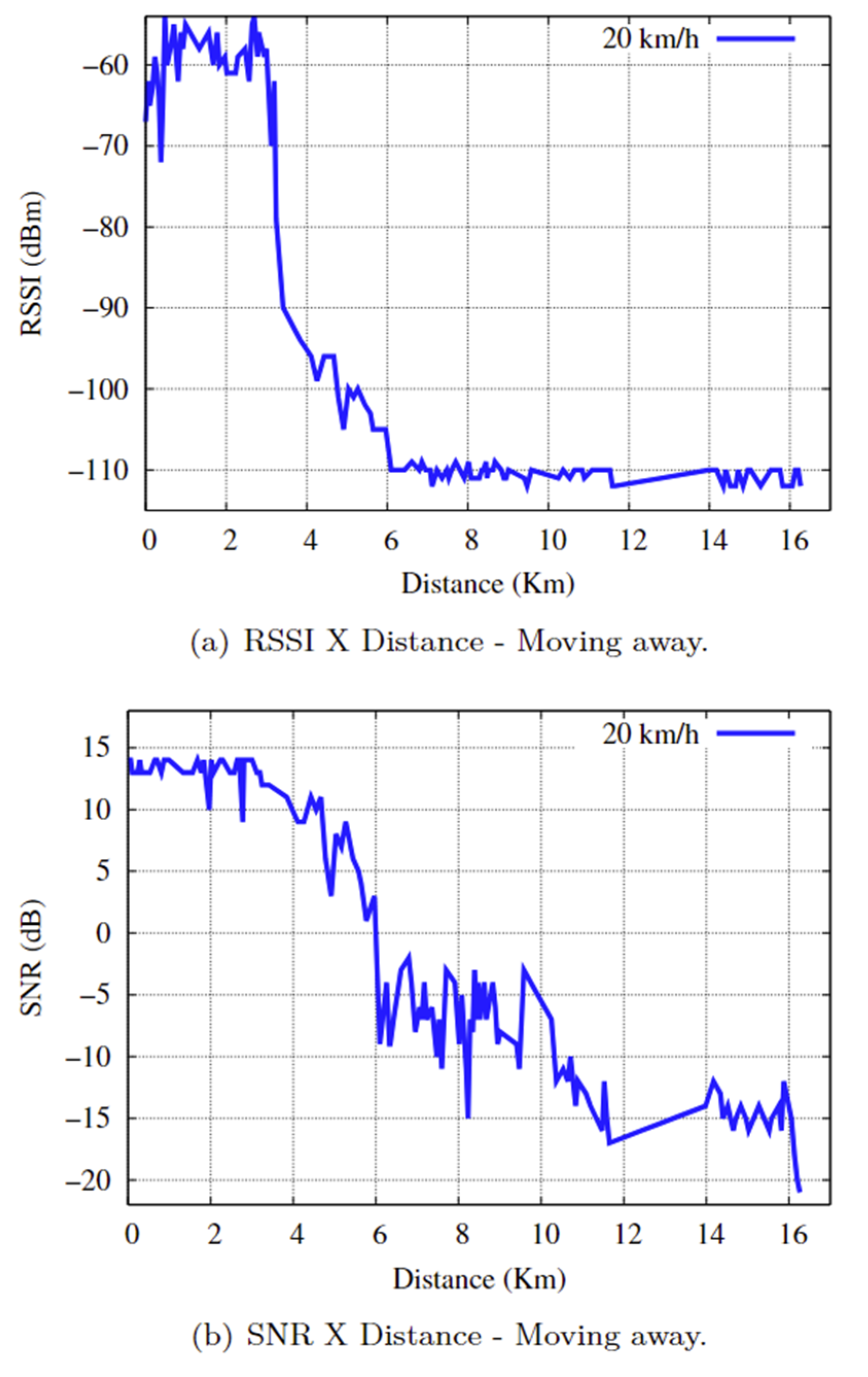
- ”GOOD” for an SNR ≤ −7 during the initial 5964 km, with a communication time of approximately 17 min and 45 s. The communication link had a stable, high-quality connection;
- ”FAIR” for a −7 < SNR < −15, which corresponds to a distance of 5965 km to 11,480 km (equivalent to 5515 km) and a communication time of approximately 16 min and 25 s, the communication link suffered a loss of signal quality; however, the LoRa network was still able to maintain synchronism and operate stably, with the status of ”FAIR”.
- ”BAD” for SNR ≥ −15, i.e., the last 4781 km and a communication time of approximately 14 min and 14 s, the communication link fluctuates between the “FAIR” and “BAD” statuses, with the “BAD” status predominating. Importantly, the environment was very noisy, which impaired the connection and caused the communication link to drop.
- For SNR ≥ −15, i.e., the first 3524 km and a communication time of approximately 13 min and 59 s, the communication link suffered severe oscillations, with a predominance of the “BAD” signal, presenting considerable noise, which impaired the connection and caused drops in the communication link.
- ”FAIR” for a −7 < SNR < −15, which corresponds to a distance of 3525 km to 7035 km (equivalent to 3510 km) and a communication time of approximately 13 min and 56 s, the communication link suffers a loss of signal quality. However, the LoRa network was still able to maintain synchronism and operate stably, with a predominance of the “FAIR” status.
- ”GOOD” for an SNR ≤ −7 during the last 5583 km and a communication time of approximately 23 min and 22 s. The communication link had a stable, high-quality connection for sending and receiving data from the LoRaWAN network. Importantly, the communication link sometimes changes to the “FAIR” status and sometimes to the “BAD” status.
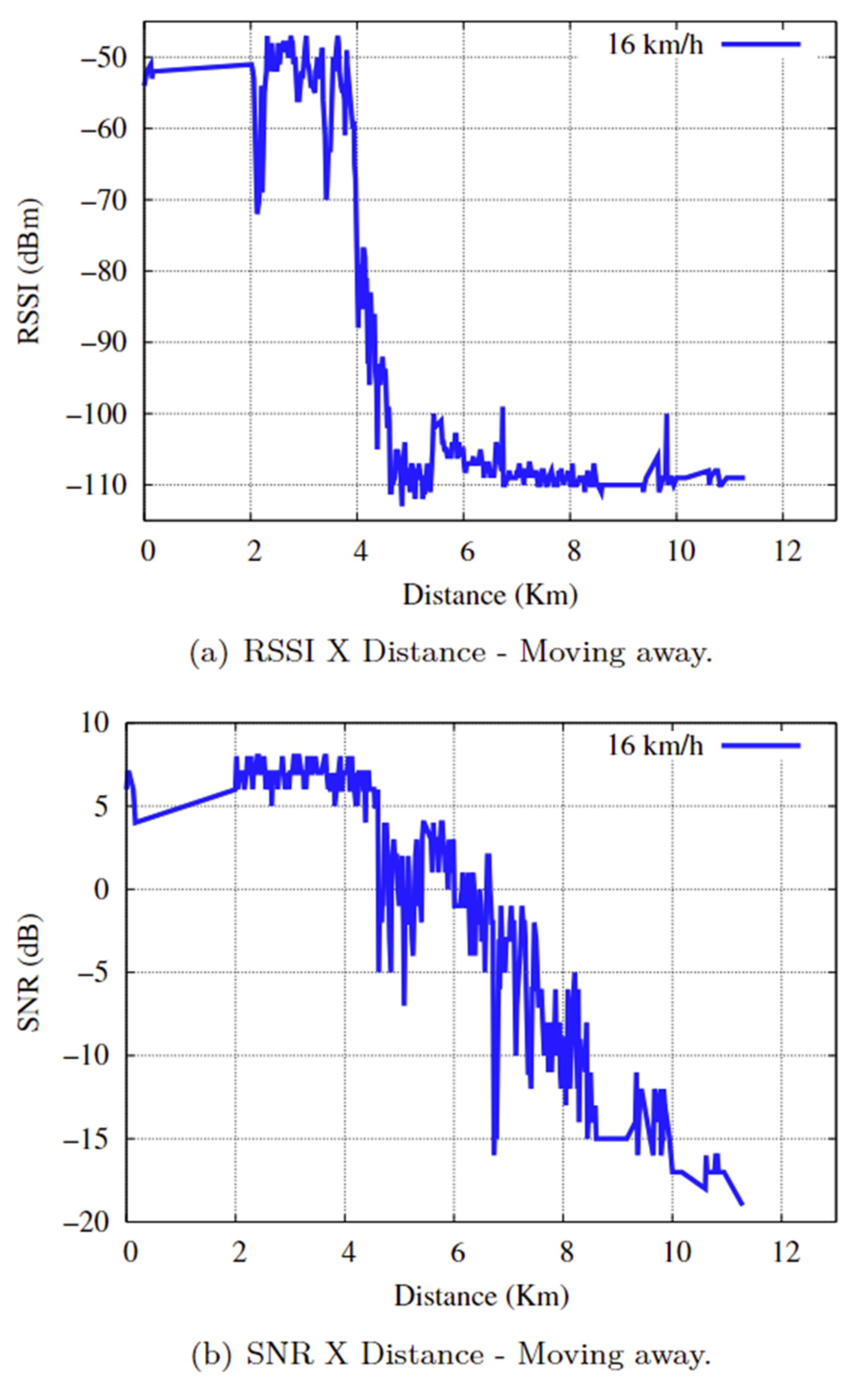
5.1.2. Communication Between End Devices
- ”GOOD” for an SNR ≤ −7 during the initial 6098 km, with a communication time of approximately 18 min and 9 s. The communication link was stable and of good quality;
- ”FAIR” for a −7 < SNR < −15, which corresponds to a distance of 6099 km up to 8232 km (equivalent to 2133 km), and a communication time of approximately 6 min and 21 s, the communication link suffers a loss of signal quality. However, the LoRa network was still able to maintain synchronism and function stably, oscillating between the “FAIR” and “GOOD” statuses but predominantly with the “FAIR” status.
- ”POOR” for an SNR ≥ −15, i.e., the last 8029 km and a communication time of approximately 23 min and 54 s, the communication link suffered severe oscillations, oscillating between the ”FAIR” and ”BAD” statuses for the most part, but with the ”BAD” status predominating. Importantly, the environment was very noisy, which impaired the connection and caused the communication link to drop.
- For an SNR ≥ −15, i.e., the first initial 5086 km and a communication time of approximately 19 min and 03 s, the communication link suffered severe oscillations, with a predominance of the “BAD” signal, presenting considerable noise, which impaired the connection and caused drops in the communication link.
- ”FAIR” for a −7 < SNR < −15, which corresponds to a distance of 5087 km to 11,285 km (equivalent to 6198 km) and a communication time of approximately 23 min and 13 s, the communication link suffers a loss of signal quality. However, the LoRa network was still able to maintain synchronism and operate stably with a predominance of “FAIR” status.
- ”GOOD” for an SNR ≤ −7 during the last 1161 km and a communication time of approximately 4 min and 21 s. The communication link had a stable, high-quality connection for sending and receiving data from the LoRaWAN network.
6. Conclusions and Future Works
- Dependence on Environmental Conditions—Communication via LoRa in densely wooded river environments, such as the Amazon, can be severely affected by environmental conditions, including physical obstacles (dense vegetation, mountains) and climatic variables (intense rainfall and high humidity). These conditions can interfere with signal propagation, affecting the range and quality of communication. In areas with a high concentration of trees or other natural barriers, signal attenuation can be significant, reducing the effectiveness of monitoring.
- Distance and Coverage Limitations—Although LoRa is efficient for long-distance communications, it still has range limitations, especially without a direct line of sight between the devices. In scenarios where the mobile device moves away from the fixed infrastructure, signal loss is inevitable beyond a certain distance. This limits continuous monitoring and can lead to the temporary loss of data until the device moves back closer to a gateway or reception point.
- Lack of Support for High Data Throughput—The LPP protocol and LoRa technology are ideal for transmitting small data packets but are not suitable for applications that require high data throughput. This represents a limitation for monitoring boats that need to send a large amount of information in real-time, as LoRa would not support this level of transfer efficiently. Thus, the approach is limited to scenarios where only essential data, such as location or small pieces of information, need to be transmitted.
- Energy Consumption in Prolonged Scenarios—Although LoRa has low energy consumption compared to other technologies, prolonged monitoring in remote areas requires careful energy management. The proposed approach may be limited in terms of operational duration, especially if the device needs to operate for long periods without recharging. In locations where access to recharging power is limited, this limitation could compromise the long-term effectiveness of monitoring.
- Scalability and Reliability in Complex Scenarios—In situations where several devices communicate simultaneously, the scalability of the LoRa network can be limited, as the LPP protocol was not originally designed to support a high number of simultaneous connections in a restricted area. This can lead to interference between devices, packet loss, and deterioration of network reliability in scenarios with a high concentration of boats.
7. Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sant’ Ana, J.F.; da Silva Filho, A.B.; Pereira, N.N. Identification of Sustainable Practices Applied to Ship Recycling. J. Clean. Prod. 2023, 389, 136050. [Google Scholar] [CrossRef]
- Keohane, R.O.; Nye, J.S. Globalization: What’s New? What’s Not?(And so What?). In Making Policy Happen; Routledge: London, UK, 2020; pp. 105–113. [Google Scholar]
- Bezrukova, N.; Volochai, M.; Hyrych, S.; Ternova, A.; Vasylyshyna, O. The Impact of Globalisation on International Trade: Dynamics of Global Trade Relations and Exchange of Goods and Services. Multidisciplinary Reviews 2024, 7, 2024spe042. [Google Scholar] [CrossRef]
- De Barros, B.R.C.; de Carvalho, E.B.; Frate, C.A.; Junior, A.C.P.B. Inland Waterway Transport Development: A Q-Method Study on Tocantins River, Brazilian Amazon. Case Stud. Transp. Policy 2023, 14, 101094. [Google Scholar] [CrossRef]
- Benjamin, C.; Figueiredo, N. The Ship Recycling Market in Brazil-The Amazon Potential. J. Environ. Manag. 2020, 253, 109540. [Google Scholar] [CrossRef]
- Ter Steege, H.; Pitman, N.C.A.; do Amaral, I.L.; de Souza Coelho, L.; de Almeida Matos, F.D.; de Andrade Lima Filho, D.; Salomão, R.P.; Wittmann, F.; Castilho, C.V.; Guevara, J.E.; et al. Mapping Density, Diversity and Species-Richness of the Amazon Tree Flora. Commun. Biol. 2023, 6, 1–14. [Google Scholar] [CrossRef]
- Polidori, L.; Caldeira, C.R.T.; Smessaert, M.; Hage, M. EL Digital Elevation Modeling through Forests: The Challenge of the Amazon. Acta Amaz. 2022, 52, 69–80. [Google Scholar] [CrossRef]
- Anderson, E.P.; Jenkins, C.N.; Heilpern, S.; Maldonado-Ocampo, J.A.; Carvajal-Vallejos, F.M.; Encalada, A.C.; Rivadeneira, J.F.; Hidalgo, M.; Cañas, C.M.; Ortega, H.; et al. Fragmentation of Andes-to-Amazon Connectivity by Hydropower Dams. Sci. Adv. 2018, 4, eaao1642. [Google Scholar] [CrossRef]
- Jézéquel, C.; Oberdorff, T.; Tedesco, P.A.; Schmitt, L. Geomorphological Diversity of Rivers in the Amazon Basin. Geomorphology 2022, 400, 108078. [Google Scholar] [CrossRef]
- Tourian, M.J.; Reager, J.T.; Sneeuw, N. The Total Drainable Water Storage of the Amazon River Basin: A First Estimate Using GRACE. Water Resour. Res. 2018, 54, 3290–3312. [Google Scholar] [CrossRef]
- Espinoza, J.-C.; Marengo, J.A.; Schongart, J.; Jimenez, J.C. The New Historical Flood of 2021 in the Amazon River Compared to Major Floods of the 21st Century: Atmospheric Features in the Context of the Intensification of Floods. Weather Clim. Extrem. 2022, 35, 100406. [Google Scholar] [CrossRef]
- Caldas, B.; Thieme, M.L.; Shahbol, N.; Coelho, M.E.; Grill, G.; Van Damme, P.A.; Aranha, R.; Cañas, C.; Fagundes, C.K.; Franco-León, N.; et al. Identifying the Current and Future Status of Freshwater Connectivity Corridors in the Amazon Basin. Conserv. Sci. Pract. 2023, 5, e12853. [Google Scholar] [CrossRef]
- Fontes, J.V.H.; de Almeida, P.R.R.; Maia, H.W.S.; Hernández, I.D.; Rodríguez, C.A.; Silva, R.; Mendoza, E.; Esperança, P.T.T.; Sanches, R.A.; Mounsif, S. Marine Accidents in the Brazilian Amazon: The Problems and Challenges in the Initiatives for Their Prevention Focused on Passenger Ships. Sustainability 2022, 15, 328. [Google Scholar] [CrossRef]
- Aziz, G.M.P.A.; Fontes, J.; Maia, H.; de Almeida, P.R.R.; Marinho, H.F.A.; Hernández, I. Rumo à Prevenção de Acidentes Com Embarcações Na Região Amazônica. Parte I: Acidentes Comuns e Métodos de Avaliação Recentes. Braz. J. Dev. 2022, 8, 75973–75995. [Google Scholar] [CrossRef]
- Rocha, T.A.H.; Silva, L.L.; Wen, F.H.; Sachett, J.; Tupetz, A.; Staton, C.A.; Monteiro, W.M.; Vissoci, J.R.N.; Gerardo, C.J. River Dataset as a Potential Fluvial Transportation Network for Healthcare Access in the Amazon Region. Sci. Data 2023, 10, 188. [Google Scholar] [CrossRef]
- Loureiro, E.S.P.; de Figueiredo, N.M.; Campos Filho, L.C.P.; Filgueiras, T.C.G.M. Analysis of Relative Efficiency of Vessels of Passenger Transportation in the Brazilian Amazon: An AHP-DEA Approach. Acta Sci. Technol. 2022, 45, e58199. [Google Scholar] [CrossRef]
- Ferreira, M.A.C.; Schor, T.; Medeiros, R.L.; Da Rocha, S.D.; Da Costa, E.B.S.; Barbosa, E.P. Development of a Sustainability Index for the Inland Waterway Transport of the Amazon. Obs. de la Econ. Latinoam. 2024, 22, e3255. [Google Scholar] [CrossRef]
- Da Cunha, A.C.; De Abreu, C.H.M.; Crizanto, J.L.P.; Cunha, H.F.A.; Brito, A.U.; Pereira, N.N. Modeling Pollutant Dispersion Scenarios in High Vessel-Traffic Areas of the Lower Amazon River. Mar. Pollut. Bull. 2021, 168, 112404. [Google Scholar] [CrossRef]
- Polo Industrial de Manaus. Available online: https://www.gov.br/suframa/pt-br/assuntos/polo-industrial-de-manaus (accessed on 16 December 2024).
- Polo Industrial de Manaus Fatura R$ 161,02 Bilhões de Janeiro a Novembro de 2023. Available online: https://www.gov.br/suframa/pt-br/publicacoes/noticias/polo-industrial-de-manaus-fatura-r-161-02-bilhoes-de-janeiro-a-novembro-de-2023#:~:text=As%20empresas%20do%20Polo%20Industrial,Franca%20de%20Manaus%20 (accessed on 16 December 2024).
- Ministério Das Comunicações-Norte Conectado. Available online: https://www.gov.br/mcom/pt-br/acesso-a-informacao/acoes-e-programas/programas-projetos-acoes-obras-e-atividades/norte-conectado (accessed on 19 December 2024).
- Conectividade Digital Em Comunidades Ribeirinhas Remotas No Interior Do Estado Do Amazonas. Available online: https://fas-amazonia.org/wp-content/uploads/2022/12/psi-conectividade-digital-comunidades-remotas_compressed.pdf (accessed on 19 December 2024).
- Agência Nacional de Telecomunicações. Available online: https://www.gov.br/anatel/pt-br/assuntos/noticias/anatel-realiza-encontro-conectividade-na-amazonia (accessed on 19 December 2024).
- Triwidyastuti, Y.; Musayyanah, M.; Ernawati, F.; Affandi, C.D. Multi-Hop Communication between LoRa End Devices. Sci. J. Inform. 2020, 7, 125–135. [Google Scholar] [CrossRef]
- Haque, K.F.; Abdelgawad, A.; Yanambaka, V.P.; Yelamarthi, K. LoRa Architecture for V2X Communication: An Experimental Evaluation with Vehicles on the Move. Sensors 2020, 20, 6876. [Google Scholar] [CrossRef]
- Chanwattanapong, W.; Hongdumnuen, S.; Kumkhet, B.; Junon, S.; Sangmahamad, P. LoRa Network Based Multi-Wireless Sensor Nodes and LoRa Gateway for Agriculture Application. In Proceedings of the 2021 Research, Invention, and Innovation Congress: Innovation Electricals and Electronics (RI2C), Bangkok, Thailand, 1–3 September 2021; pp. 133–136. [Google Scholar]
- Di Renzone, G.; Parrino, S.; Peruzzi, G.; Pozzebon, A.; Vangelista, L. LoRaWAN for Vehicular Networking: Field Tests for Vehicle-to-Roadside Communication. Sensors 2024, 24, 1801. [Google Scholar] [CrossRef]
- Al Mojamed, M. LTM-LoRaWAN: A Multi-Hop Communication System for LoRaWAN. Electronics 2023, 12, 4225. [Google Scholar] [CrossRef]
- Attia, T.; Heusse, M.; Tourancheau, B.; Duda, A. Experimental Characterization of LoRaWAN Link Quality. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Bezerra, N.S.; Ahlund, C.; Saguna, S.; de Sousa, V.A. Propagation Model Evaluation for LoRaWAN: Planning Tool Versus Real Case Scenario. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019; pp. 1–6. [Google Scholar]
- Croce, D.; Gucciardo, M.; Mangione, S.; Santaromita, G.; Tinnirello, I. Impact of LoRa Imperfect Orthogonality: Analysis of Link-Level Performance. IEEE Commun. Lett. 2018, 22, 796–799. [Google Scholar] [CrossRef]
- Da Rocha Santos, L.C.; Bruschi, S.M.; de Souza, P.S.L.; Ueyama, J.; de Jesus dos Santos, A.; Barbosa, J.S. Performance Analysis of a Vehicular Ad Hoc Network Using LoRa Technology and IoT Devices in Amazon Rivers. Ad. Hoc. Netw. 2024, 152, 103301. [Google Scholar] [CrossRef]
- Imcp Htlrbl32l. Available online: https://github.com/htmicron/htlrbl32l (accessed on 19 December 2024).
- Anwar, K.; Rahman, T.; Zeb, A.; Khan, I.; Zareei, M.; Vargas-Rosales, C. RM-ADR: Resource Management Adaptive Data Rate for Mobile Application in LoRaWAN. Sensors 2021, 21, 7980. [Google Scholar] [CrossRef]
- Al Mojamed, M. On the Use of LoRaWAN for Mobile Internet of Things: The Impact of Mobility. Appl. Syst. Innov. 2021, 5, 5. [Google Scholar] [CrossRef]
- Parrino, S.; Peruzzi, G.; Pozzebon, A. LoPATraN: Low Power Asset Tracking by Means of Narrow Band IoT (NB-IoT) Technology. Sensors 2021, 21, 3772. [Google Scholar] [CrossRef]
- Sobhi, S.; Elzanaty, A.; Selim, M.Y.; Ghuniem, A.M.; Abdelkader, M.F. Mobility of LoRaWAN Gateways for Efficient Environmental Monitoring in Pristine Sites. Sensors 2023, 23, 1698. [Google Scholar] [CrossRef]
- Kim, J.; Moon, J.; Moon, C. Lane-Level Map Generation and Management Framework Using Connected Car Data. Electronics 2023, 12, 3738. [Google Scholar] [CrossRef]
- Aernouts, M. Localization with Low Power Wide Area Networks; University of Antwerp: Antwerp, Belgium, 2022. [Google Scholar]
- Araujo, M.; Leitão, P.; Castro, M.; Castro, J.; Bernuy, M. Development of an IoT-Based Device for Data Collection on Sheep and Goat Herding in Silvopastoral Systems. Sensors 2024, 24, 5528. [Google Scholar] [CrossRef]
- Silva, F.S.D.; Neto, E.P.; Oliveira, H.; Rosario, D.; Cerqueira, E.; Both, C.; Zeadally, S.; Neto, A.V. A Survey on Long-Range Wide-Area Network Technology Optimizations. IEEE Access 2021, 9, 106079–106106. [Google Scholar] [CrossRef]
- Kufakunesu, R.; Hancke, G.P.; Abu-Mahfouz, A.M. A Survey on Adaptive Data Rate Optimization in LoRaWAN: Recent Solutions and Major Challenges. Sensors 2020, 20, 5044. [Google Scholar] [CrossRef] [PubMed]
- Fernandes Carvalho, D.; Ferrari, P.; Sisinni, E.; Depari, A.; Rinaldi, S.; Pasetti, M.; Silva, D. A Test Methodology for Evaluating Architectural Delays of LoRaWAN Implementations. Pervasive Mob. Comput. 2019, 56, 1–17. [Google Scholar] [CrossRef]
- Spadaccino, P.; Crinó, F.G.; Cuomo, F. LoRaWAN Behaviour Analysis through Dataset Traffic Investigation. Sensors 2022, 22, 2470. [Google Scholar] [CrossRef] [PubMed]
- Chowdhury, A.R.; Chandra Bakshi, S.; Pramanik, A.; Venkateswaran, P. On Transmission Time of a LoRa Packet in a LoRa-Based IoT System for Underground Environment. In Proceedings of the 2023 8th International Conference on Computers and Devices for Communication (CODEC), Kolkata, India, 14–16 December 2023; pp. 1–2. [Google Scholar]
- Villarim, M.R.; Vitor Holanda de Luna, J.; de Farias Medeiros, D.; Imaculada Soares Pereira, R.; de Souza, C.P.; Baiocchi, O.; da Cunha Martins, F.C. An Evaluation of LoRa Communication Range in Urban and Forest Areas: A Case Study in Brazil and Portugal. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; pp. 0827–0832. [Google Scholar]
- Tapparel, J.; Afisiadis, O.; Mayoraz, P.; Balatsoukas-Stimming, A.; Burg, A. An Open-Source LoRa Physical Layer Prototype on GNU Radio. In Proceedings of the 2020 IEEE 21st International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Atlanta, GA, USA, 26–29 May 2020; pp. 1–5. [Google Scholar]
- Triwidyastuti, Y. Performance Analysis of Point-to-Point LoRa End Device Communication. Lontar Komput. J. Ilm. Teknol. Inf. 2019, 10, 140–149. [Google Scholar] [CrossRef]
- Croce, D.; Garlisi, D.; Giuliano, F.; Valvo, A.L.; Mangione, S.; Tinnirello, I. Performance of LoRa for Bike-Sharing Systems. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 2–4 July 2019; pp. 1–6. [Google Scholar]
- Lim, J.-T.; Han, Y. Spreading Factor Allocation for Massive Connectivity in LoRa Systems. IEEE Commun. Lett. 2018, 22, 800–803. [Google Scholar] [CrossRef]
- Ta, D.T.; Khawam, K.; Lahoud, S.; Adjih, C.; Martin, S.L.-M. Toward an Intelligent Resource Allocation Approach for LoRaWAN. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Big Island, HI, USA, 9–13 December 2019; pp. 9–13. [Google Scholar]
- Eridani, D.; Widianto, E.D.; Augustinus, R.D.O.; Faizal, A.A. Monitoring System in Lora Network Architecture Using Smart Gateway in Simple LoRa Protocol. In Proceedings of the 2019 International Seminar on Research of Information Technology and Intelligent Systems (ISRITI), Yogyakarta, Indonesia, 5–6 December 2019; pp. 200–204. [Google Scholar]
- Di Renzone, G.; Parrino, S.; Peruzzi, G.; Pozzebon, A. LoRaWAN in Motion: Preliminary Tests for Real Time Low Power Data Gathering from Vehicles. In Proceedings of the 2021 IEEE International Workshop on Metrology for Automotive (MetroAutomotive), Bologna, Italy, 1–2 July 2021; pp. 232–236. [Google Scholar]
- Radeta, M.; Ribeiro, M.; Vasconcelos, D.; Noronha, H.; Nunes, N.J. LoRaquatica: Studying Range and Location Estimation Using LoRa and IoT in Aquatic Sensing. In Proceedings of the 2020 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Austin, TX, USA, 23–27 March 2020; pp. 1–6. [Google Scholar]
- Lin, K.; Hao, T.; Zheng, W.; He, W. Analysis of LoRa Link Quality for Underwater Wireless Sensor Networks: A Semi-Empirical Study. In Proceedings of the 2019 IEEE Asia-Pacific Microwave Conference (APMC), Singapore, 10–13 December 2019; pp. 120–122. [Google Scholar]
- Zourmand, A.; Kun Hing, A.L.; Wai Hung, C.; AbdulRehman, M. Internet of Things (IoT) Using LoRa Technology. In Proceedings of the 2019 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia, 29 June 2019; pp. 324–330. [Google Scholar]
- Edward, P.; Behiry, D.; Mandour, M.; Elshabrawy, T. Practical Performance Evaluation of Multi-User Interleaved Chirp Spreading LoRa Networks. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Virtual, 27–28 September 2021; pp. 1–6. [Google Scholar]
- Ortiz, F.M.; de Almeida, T.T.; Ferreira, A.E.; Costa, L.H.M. Experimental vs. Simulation Analysis of LoRa for Vehicular Communications. Comput. Commun. 2020, 160, 299–310. [Google Scholar] [CrossRef]
- Xu, W.; Kim, J.Y.; Huang, W.; Kanhere, S.S.; Jha, S.K.; Hu, W. Measurement, Characterization, and Modeling of LoRa Technology in Multifloor Buildings. IEEE Internet Things J. 2020, 7, 298–310. [Google Scholar] [CrossRef]
- Doroshkin, A.A.; Zadorozhny, A.M.; Kus, O.N.; Prokopyev, V.Y.; Prokopyev, Y.M. Experimental Study of LoRa Modulation Immunity to Doppler Effect in CubeSat Radio Communications. IEEE Access 2019, 7, 75721–75731. [Google Scholar] [CrossRef]
- Hernández, C.F.; Hochet Derévianckine, G.; Guitton, A.; Iova, O.; Valois, F. Indoor Performance Evaluation of LoRa® 2. 4 GHz. In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, UK, 26–29 March 2023; pp. 1–6. [Google Scholar]
- Network Simulator 3. Available online: https://www.nsnam.org/ (accessed on 20 December 2024).
- Parri, L.; Parrino, S.; Peruzzi, G.; Pozzebon, A. Low Power Wide Area Networks (LPWAN) at Sea: Performance Analysis of Offshore Data Transmission by Means of LoRaWAN Connectivity for Marine Monitoring Applications. Sensors 2019, 19, 3239. [Google Scholar] [CrossRef]
- Rak831 Wislink Lpwan. Available online: https://docs.rakwireless.com/Product-Categories/WisLink/RAK831/Datasheet/ (accessed on 20 December 2024).
- B-L072z-Lrwan1. Available online: https://pdf1.alldatasheet.com/datasheet-pdf/view/926588/STMICROELECTRONICS/B-L072Z-LRWAN1.html (accessed on 20 December 2024).
- 4ghz 14dbi Yagi Antenna. Available online: https://docs.rs-online.com/d481/0900766b81673199.pdf (accessed on 20 December 2024).
- Sx 1262. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1262 (accessed on 20 December 2024).
- Sx 1276. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1276 (accessed on 20 December 2024).
- Saban, M.; Aghzout, O.; Medus, L.D.; Rosado, A. Experimental Analysis of IoT Networks Based on LoRa/LoRaWAN under Indoor and Outdoor Environments: Performance and Limitations. IFAC-Pap. 2021, 54, 159–164. [Google Scholar] [CrossRef]
- Elbsir, H.E.; Kassab, M.; Bhiri, S.; Bedoui, M.H. Evaluation of LoRaWAN Class B Performances and Its Optimization for Better Support of Actuators. Comput. Commun. 2023, 198, 128–139. [Google Scholar] [CrossRef]
- Ron, D.; Lee, C.-J.; Lee, K.; Choi, H.-H.; Lee, J.-R. Performance Analysis and Optimization of Downlink Transmission in LoRaWAN Class B Mode. IEEE Internet Things J. 2020, 7, 7836–7847. [Google Scholar] [CrossRef]
- Semtech. Lora-Platform for IoT. Available online: https://www.semtech.com/lora (accessed on 2 October 2024).
- Lora Alliance, What Is Lorawan® Specification. Available online: https://lora-alliance.org/about-lorawan/ (accessed on 19 December 2024).
- Airtime Calculator for Lorawan. Available online: https://avbentem.github.io/airtime-calculator/ttn/au915 (accessed on 19 December 2024).
- Lorawan Airtime Calculator. Available online: https://www.thethingsnetwork.org/airtime-calculator (accessed on 19 December 2024).
- The Things Network. The Things Network. Available online: https://www.thethingsnetwork.org/ (accessed on 19 December 2024).
- LoRa-LoRaWAN and Internet of Things for Beginners. Available online: https://www.univ-smb.fr/lorawan/wp-content/uploads/2022/01/Book-LoRa-LoRaWAN-and-Internet-of-Things.pdf (accessed on 19 December 2024).
- Become a Lorawan Expert. Available online: https://www.univ-smb.fr/lorawan/ (accessed on 19 December 2024).
- Lora Imcp Htlrbl32l. Available online: https://htmicron.com.br/en/iot-2/ (accessed on 19 December 2024).
- Sip Imcp Htlrbl32l. Available online: https://lora-alliance.org/marketplace/ht-micron-semicondutores-s-a/sip-imcp-htlrbl32l/ (accessed on 19 December 2024).
- Hana Electronics. Available online: https://www.hanaelectronics.com.br/en/ (accessed on 19 December 2024).
- Wise Studio. Available online: https://www.advantech.com/pt-br/support/details/utility?id=1-1MJSJKX (accessed on 20 December 2024).
- Understand How Rssi and Snr Are Considered as Good Radio Level. Available online: https://sensing-labs.com/f-a-q/a-good-radio-level/ (accessed on 20 December 2024).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









| Description | Value |
|---|---|
| MCU and Bluetooth LE Transceiver | STMicroeletronics BlueNRG-355VC |
| Operation Zones | EU433, EU863-870, US902-928 AU915-928, AS923, KR920-923, IN865-867, RU864-870 |
| Memory | 256 KB |
| Sleep Mode Consumption | 2 μA |
| GPIO | 20 pins |
| Communication Interfaces | USART, LPUART, I2C, SPI, I2S |
| ADC | 5× (12 bits) |
| Input Voltage | 2.7–3.6 V |
| TX Power | +22 dBm |
| RX Sensitivity | −132 dBm |
| Bluetooth TX | +7 dBm |
| Bluetooth RX | −94 dBm |
| LoRa TX Consumption | 112 mA |
| LoRa RX Consumption | 4.6 mA |
| Bluetooth TX Consumption | 6 mA |
| Bluetooth RX Consumption | 7 mA |
| Feature | Specification |
|---|---|
| Architecture | High-sensitivity GPS receiver |
| Channels | 50 parallel channels |
| Protocol | NMEA 0183 and UBX |
| Communication Interface | UART, SPI, USB (some variations) |
| Horizontal Accuracy | ~2.5 m (CEP) |
| Maximum Speed | 500 m/s |
| Maximum Altitude | 50,000 m |
| Update Rate | Up to 5 Hz (configurable) |
| Acquisition Time | Cold Start: ~27 s; Hot Start: ~1 s |
| Operating Voltage | 2.7 V to 3.6 V (typical 3.3 V) |
| Current Consumption | Typical: ~45 mA |
| Sensitivity (Tracking) | −161 dBm |
| Sensitivity (Cold Start) | −148 dBm |
| Sensitivity (Hot Start) | −160 dBm |
| Dimensions | 16 mm × 12.2 mm × 2.4 mm |
| Weight | ~4 g |
| Operating Temperature | −40 °C to +85 °C |
| Antenna | Supports active or passive antennas; LNA-integrated |
| Certifications | CE, FCC, RoHS |
| Description | Value |
|---|---|
| Package size | [22–242] (bytes) |
| Frequency | AU 915 (MHz)–8 Channels |
| Transmission Band | 125 (kHz) |
| Code rate | 4/5 |
| Spreading Factor | 7–12 (bits/s) |
| Velocity | 15 or 20 (Km/h) |
| Description | Value |
|---|---|
| Chip | SX 1303 mPCIe card |
| Channels | 8 |
| RX Sensitivity | −139 (dBm) |
| TX Power | 27 (dBm) |
| Transport Protocol | UDP Packet Forwarder |
| Description | Value |
|---|---|
| Package size | 44 (bytes) |
| Frequency | 905 (MHz) |
| Transmission band | 125 (KHz) |
| Code rate | 4/5 |
| Spreading factor | 12 (bits/s) |
| Velocity | 16 (km/h) |
| Protocol | LPP |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodrigues, M.; dos Santos, A.; Lima, H.; Nogueira, W.; de Lucena Junior, V. Tracking Boats on Amazon Rivers—A Case Study with the LoRa/LoRaWAN. Sensors 2025, 25, 496. https://doi.org/10.3390/s25020496
Rodrigues M, dos Santos A, Lima H, Nogueira W, de Lucena Junior V. Tracking Boats on Amazon Rivers—A Case Study with the LoRa/LoRaWAN. Sensors. 2025; 25(2):496. https://doi.org/10.3390/s25020496
Chicago/Turabian StyleRodrigues, Marlos, Alyson dos Santos, Hillermann Lima, Warley Nogueira, and Vicente de Lucena Junior. 2025. "Tracking Boats on Amazon Rivers—A Case Study with the LoRa/LoRaWAN" Sensors 25, no. 2: 496. https://doi.org/10.3390/s25020496
APA StyleRodrigues, M., dos Santos, A., Lima, H., Nogueira, W., & de Lucena Junior, V. (2025). Tracking Boats on Amazon Rivers—A Case Study with the LoRa/LoRaWAN. Sensors, 25(2), 496. https://doi.org/10.3390/s25020496