
An Improved Speed Sensing Method for Drive Control

 , ,
, ,  and
and
Abstract
1. Introduction
- The effect of counting-based speed sensing is modelled, including the time lag and variance of measurements.
- A new speed sensing is proposed using the popular interruption-based DSP module. The proposal reduces the time lag without incurring increased variance in the measurements.
- Controller tuning with improved speed measurements is experimentally investigated.
2. Speed Sensing via Incremental Encoders
3. Proposed Speed Sensing Method
- Obtain the actual value .
- Roll the stored y values in Y to include , discarding .
- Apply the min–max operator to the updated set Y, computing .
- If , use or else use .
4. Experimental Assessment
4.1. Drive Control
4.2. Experimental Setup
4.3. Performance Indices
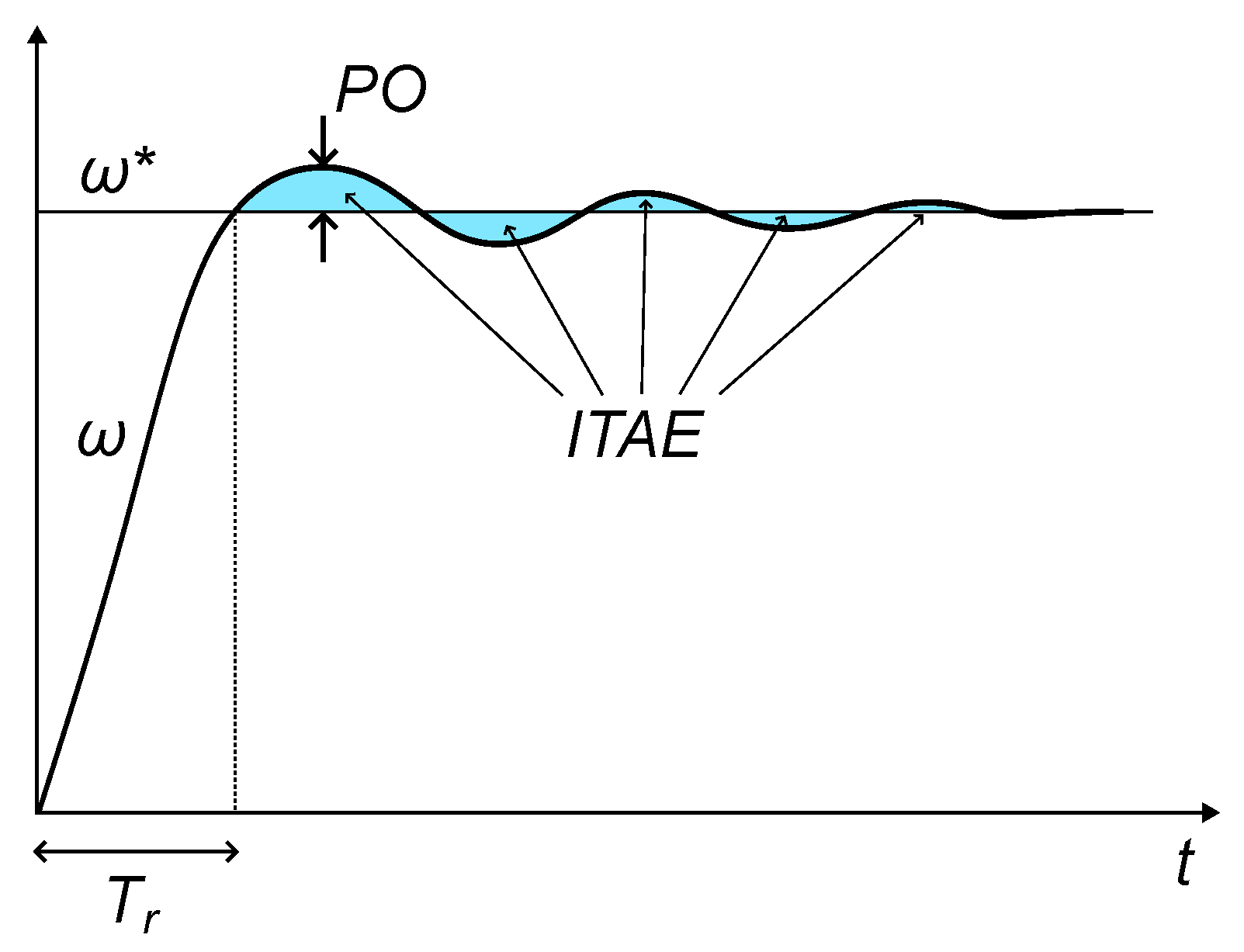
- Mechanical speed overshoot (). In most cases, some overshoot is allowed as a trade-off with the speed of response (i.e., short transients).
- Rise time (). It is defined as the time from the step change in reference to the first arrival at the new level. Short transients are characterized by low values of followed by well-damped behavior.
- Integral time absolute error (). This indicator takes into account how long the oscillations last after a step change in the reference. For a well-damped system, the should be low.
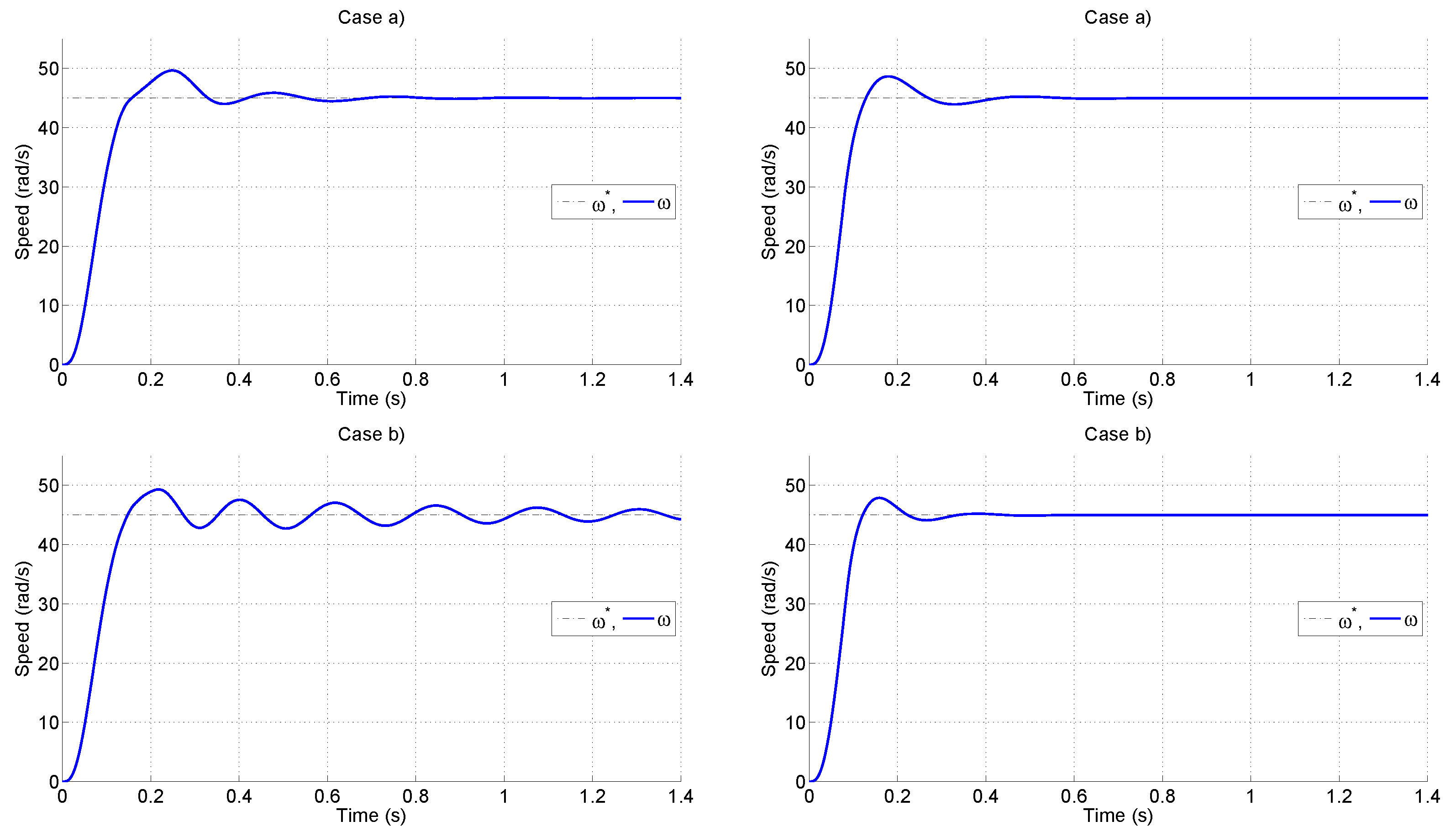
4.4. Tests and Results
- Case (a), where and . This tuning aims at a trade-off between overshoot and damped response.
- Case (b), where and . This tuning aims at a faster response, potentially incurring higher oscillations.
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ASF | Average switching frequency |
| DSP | Digital signal processor |
| FSMPC | Finite-State Model-Predictive Control |
| IFOC | Indirect Field-Oriented Control |
| IM | Induction machine |
| ITAE | Integral of time-weighted absolute error |
| MPC | Model-Predictive Control |
| PI | Proportional integral |
| PO | Percentage overshoot |
| PID | Proportional integral derivative |
| PWM | Pulse width modulation |
| VSI | Voltage source inverter |
References
- Aktas, M.; Awaili, K.; Ehsani, M.; Arisoy, A. Direct torque control versus indirect field-oriented control of induction motors for electric vehicle applications. Eng. Sci. Technol. Int. J. 2020, 23, 1134–1143. [Google Scholar] [CrossRef]
- Sheik, M.S.; Balaji, K. Review on Induction Motor Control Strategies with Various Converter and Inverter Topologies. In Intelligent Computing in Engineering: Select Proceedings of RICE 2019; Springer: Berlin/Heidelberg, Germany, 2020; pp. 653–663. [Google Scholar]
- Salas, F.; Gordillo, F.; Aracil, J.; Reginatto, R. Codimension-two bifurcations in indirect field oriented control of induction motor drives. Int. J. Bifurc. Chaos 2008, 18, 779–792. [Google Scholar] [CrossRef]
- Jung, C.; Torrico, C.R.C.; Carati, E.G. Adaptive loss model control for robustness and efficiency improvement of induction motor drives. IEEE Trans. Ind. Electron. 2021, 69, 10893–10903. [Google Scholar] [CrossRef]
- Sowmiya, M.; Thilagar, S.H. Vector-Controlled Dual Stator Multiphase Induction Motor Drive for Energy-Efficient Operation of Electric Vehicles. IETE J. Res. 2023, 69, 3693–3710. [Google Scholar] [CrossRef]
- Ohmae, T.; Matsuda, T.; Kamiyama, K.; Tachikawa, M. A microprocessor-controlled high-accuracy wide-range speed regulator for motor drives. IEEE Trans. Ind. Electron. 1982, IE-29, 207–211. [Google Scholar] [CrossRef]
- Hace, A.; Čurkovič, M. Accurate FPGA-based velocity measurement with an incremental encoder by a fast generalized divisionless MT-type algorithm. Sensors 2018, 18, 3250. [Google Scholar] [CrossRef]
- Lashkevich, M.; Savkin, D.; Aliamkin, D.; Kulik, E.; Chen, H.; Demidova, G.; Anuchin, A. Calibration of Incremental Position Encoder for the Precise Measurement of Low Speeds. IEEE Sens. J. 2023, 24, 573–583. [Google Scholar] [CrossRef]
- Anuchin, A.; Dianov, A.; Briz, F. Synchronous constant elapsed time speed estimation using incremental encoders. IEEE/ASME Trans. Mechatronics 2019, 24, 1893–1901. [Google Scholar] [CrossRef]
- Kavanagh, R.C. Performance analysis and compensation of M/T-type digital tachometers. IEEE Trans. Instrum. Meas. 2001, 50, 965–970. [Google Scholar] [CrossRef]
- Alcázar Vargas, M.; Perez Fernandez, J.; Velasco Garcia, J.M.; Cabrera Carrillo, J.A.; Castillo Aguilar, J.J. A Novel Method for Determining Angular Speed and Acceleration Using Sin-Cos Encoders. Sensors 2021, 21, 577. [Google Scholar] [CrossRef]
- Kavanagh, R.C. An enhanced constant sample-time digital tachometer through oversampling. Trans. Inst. Meas. Control 2004, 26, 83–98. [Google Scholar] [CrossRef]
- Li, R.; Wu, J.; Dai, E. An improved M/T speed algorithm based on RISC-V DSP. In Proceedings of the 2020 International Conference on Intelligent Computing, Automation and Systems (ICICAS), Chongqing, China, 11–13 December 2020; pp. 105–108. [Google Scholar] [CrossRef]
- Colodro, F.; Mora, J.; Barrero, F.; Arahal, M.; Martinez-Heredia, J. Analysis and simulation of a novel speed estimation method based on oversampling and noise shaping techniques. Results Eng. 2024, 21, 101670. [Google Scholar] [CrossRef]
- Vázquez-Gutiérrez, Y.; O’Sullivan, D.L.; Kavanagh, R.C. Small-signal modeling of the incremental optical encoder for motor control. IEEE Trans. Ind. Electron. 2019, 67, 3452–3461. [Google Scholar] [CrossRef]
- Schwenzer, M.; Ay, M.; Bergs, T.; Abel, D. Review on model predictive control: An engineering perspective. Int. J. Adv. Manuf. Technol. 2021, 117, 1327–1349. [Google Scholar] [CrossRef]
- Lim, C.S.; Levi, E.; Jones, M.; Rahim, N.; Hew, W.P. A Comparative Study of Synchronous Current Control Schemes Based on FCS-MPC and PI-PWM for a Two-Motor Three-Phase Drive. IEEE Trans. Ind. Electron. 2014, 61, 3867–3878. [Google Scholar] [CrossRef]
- Sain, C.; Banerjee, A.; Kumar Biswas, P.; Sudhakar Babu, T.; Dragicevic, T. Updated PSO optimised fuzzy-PI controlled buck type multi-phase inverter-based PMSM drive with an over-current protection scheme. IET Electr. Power Appl. 2020, 14, 2331–2339. [Google Scholar] [CrossRef]
- Arahal, M.R.; Barrero, F.; Satué, M.G.; Ramírez, D.R. Predictive Control of Multi-Phase Motor for Constant Torque Applications. Machines 2022, 10, 211. [Google Scholar] [CrossRef]
- Ayala, M.; Doval-Gandoy, J.; Rodas, J.; Gonzalez, O.; Gregor, R.; Delorme, L.; Romero, C.; Fleitas, A. Field-weakening strategy with modulated predictive current control applied to six-phase induction machines. Machines 2024, 12, 178. [Google Scholar] [CrossRef]
- Ren, Z.; Ji, J.; Tang, H.; Tao, T.; Huang, L.; Zhao, W. Model Predictive Torque Control for a Dual Three-phase PMSM Using Modified Dual Virtual Vector Modulation Method. Chin. J. Electr. Eng. 2022, 8, 91–103. [Google Scholar] [CrossRef]
- Satue, M.G.; Arahal, M.R.; Ramirez, D.R.; Barrero, F. Multi-phase predictive control using two virtual-voltage-vector constellations. Rev. Iberoam. Autom. Inform. Ind. 2023, 20, 347–354. [Google Scholar]
- Yepes, A.G.; Lopez, O.; Gonzalez-Prieto, I.; Duran, M.J.; Doval-Gandoy, J. A comprehensive survey on fault tolerance in multiphase AC drives, Part 1: General overview considering multiple fault types. Machines 2022, 10, 208. [Google Scholar] [CrossRef]
- Jabbour, N.; Mademlis, C. Online parameters estimation and autotuning of a discrete-time model predictive speed controller for induction motor drives. IEEE Trans. Power Electron. 2018, 34, 1548–1559. [Google Scholar] [CrossRef]
- Satue, M.G.; Arahal, M.R.; Ramirez, D.R. Estimation of rotor currents in polyphase machines for predictive control. Rev. Iberoam. Autom. Inform. Ind. 2023, 20, 25–31. [Google Scholar]
- Xia, C.; Zhou, Z.; Wang, Z.; Yan, Y.; Shi, T. Computationally efficient multi-step direct predictive torque control for surface-mounted permanent magnet synchronous motor. IET Electr. Power Appl. 2017, 11, 805–814. [Google Scholar] [CrossRef]
- Ayala, M.; Doval-Gandoy, J.; Rodas, J.; Gonzalez, O.; Gregor, R. Current control designed with model based predictive control for six-phase motor drives. ISA Trans. 2020, 98, 496–504. [Google Scholar] [CrossRef]
- Sun, T.; Jia, C.; Liang, J.; Li, K.; Peng, L.; Wang, Z.; Huang, H. Improved modulated model-predictive control for PMSM drives with reduced computational burden. IET Power Electron. 2020, 13, 3163–3170. [Google Scholar] [CrossRef]
- Arahal, M.; Satué, M.; Barrero, F. Multi-phase weighted stator current tracking using a hyper-plane partition of the control set. Control Eng. Pract. 2024, 153, 106114. [Google Scholar] [CrossRef]
- Cai, Y.; Yan, S.; Cui, Y.; Gao, X. Single-loop control method FCS-MPC for PMSG. IEICE Electron. Express 2023, 20, 20220500. [Google Scholar] [CrossRef]
- Janiszewski, D. An FPGA-Based Trigonometric Kalman Filter Approach for Improving the Measurement Quality of a Multi-Head Rotational Encoder. Energies 2024, 17, 6122. [Google Scholar] [CrossRef]
- López, K.; Garrido, R.; Mondié, S. Cascade proportional integral retarded control of servodrives. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 662–671. [Google Scholar] [CrossRef]
- Veronesi, M.; Visioli, A. Optimized tuning rules for proportional-integral controllers with selected robustness. Asian J. Control 2023, 25, 1731–1744. [Google Scholar] [CrossRef]
- Chen, L.; Chen, G.; Li, P.; Lopes, A.M.; Machado, J.T.; Xu, S. A variable-order fractional proportional-integral controller and its application to a permanent magnet synchronous motor. Alex. Eng. J. 2020, 59, 3247–3254. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| Resistance stator side, | 12.85 | |
| Resistance rotor side, | 4.80 | |
| Mutual inductance, | 681.7 | mH |
| Number of pairs of poles, P | 3 | - |
| Encoder precision, Q | 2500 | ppr |
| Control sampling period, | 50 |
| Standard | Proposal | |||||
|---|---|---|---|---|---|---|
| Tuning | ||||||
| (a) | 10.39 | 0.1569 | 50.6 | 8.13 | 0.1287 | 27.9 |
| (b) | 9.54 | 0.1475 | 328.4 | 6.40 | 0.1215 | 17.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arahal, M.R.; Satué, M.G.; Martínez-Heredia, J.M.; Colodro, F. An Improved Speed Sensing Method for Drive Control. Sensors 2025, 25, 515. https://doi.org/10.3390/s25020515
Arahal MR, Satué MG, Martínez-Heredia JM, Colodro F. An Improved Speed Sensing Method for Drive Control. Sensors. 2025; 25(2):515. https://doi.org/10.3390/s25020515
Chicago/Turabian StyleArahal, Manuel R., Manuel G. Satué, Juana M. Martínez-Heredia, and Francisco Colodro. 2025. "An Improved Speed Sensing Method for Drive Control" Sensors 25, no. 2: 515. https://doi.org/10.3390/s25020515
APA StyleArahal, M. R., Satué, M. G., Martínez-Heredia, J. M., & Colodro, F. (2025). An Improved Speed Sensing Method for Drive Control. Sensors, 25(2), 515. https://doi.org/10.3390/s25020515