
GravelSens: A Smart Gravel Sensor for High-Resolution, Non-Destructive Monitoring of Clogging Dynamics

 , , , , and
, , , , and
Abstract
1. Introduction
2. Materials and Methods
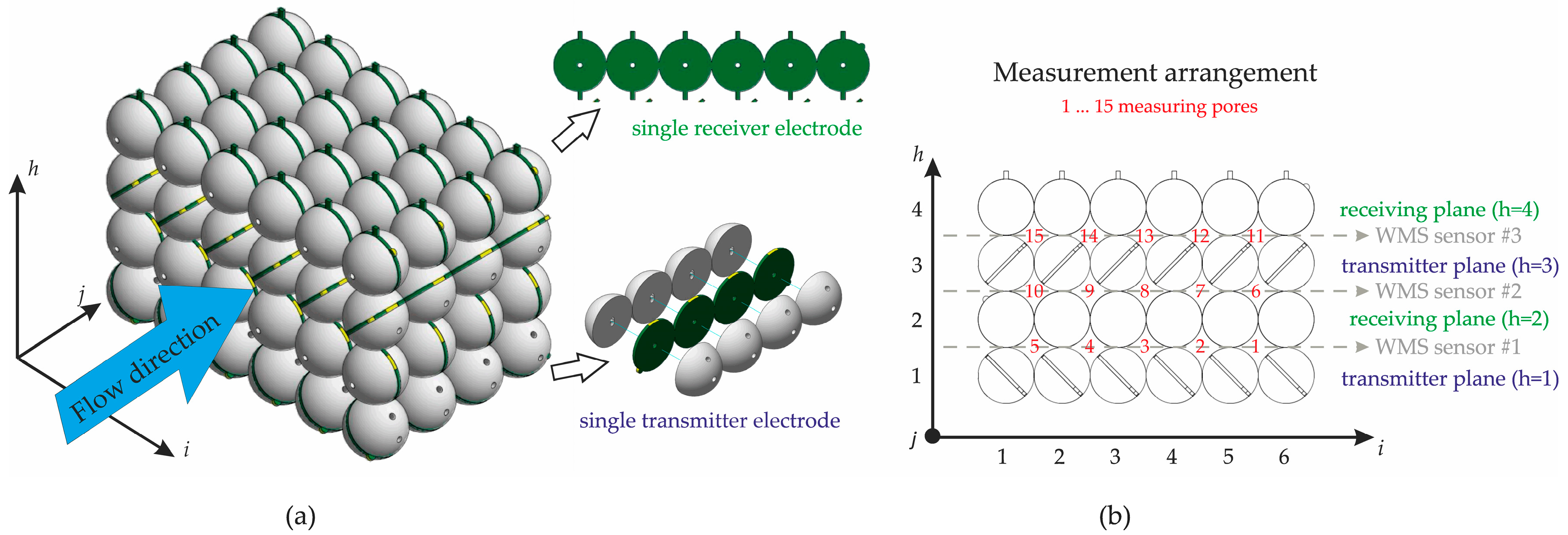
2.1. Wire-Mesh Sensors Working Principle and Data Analysis

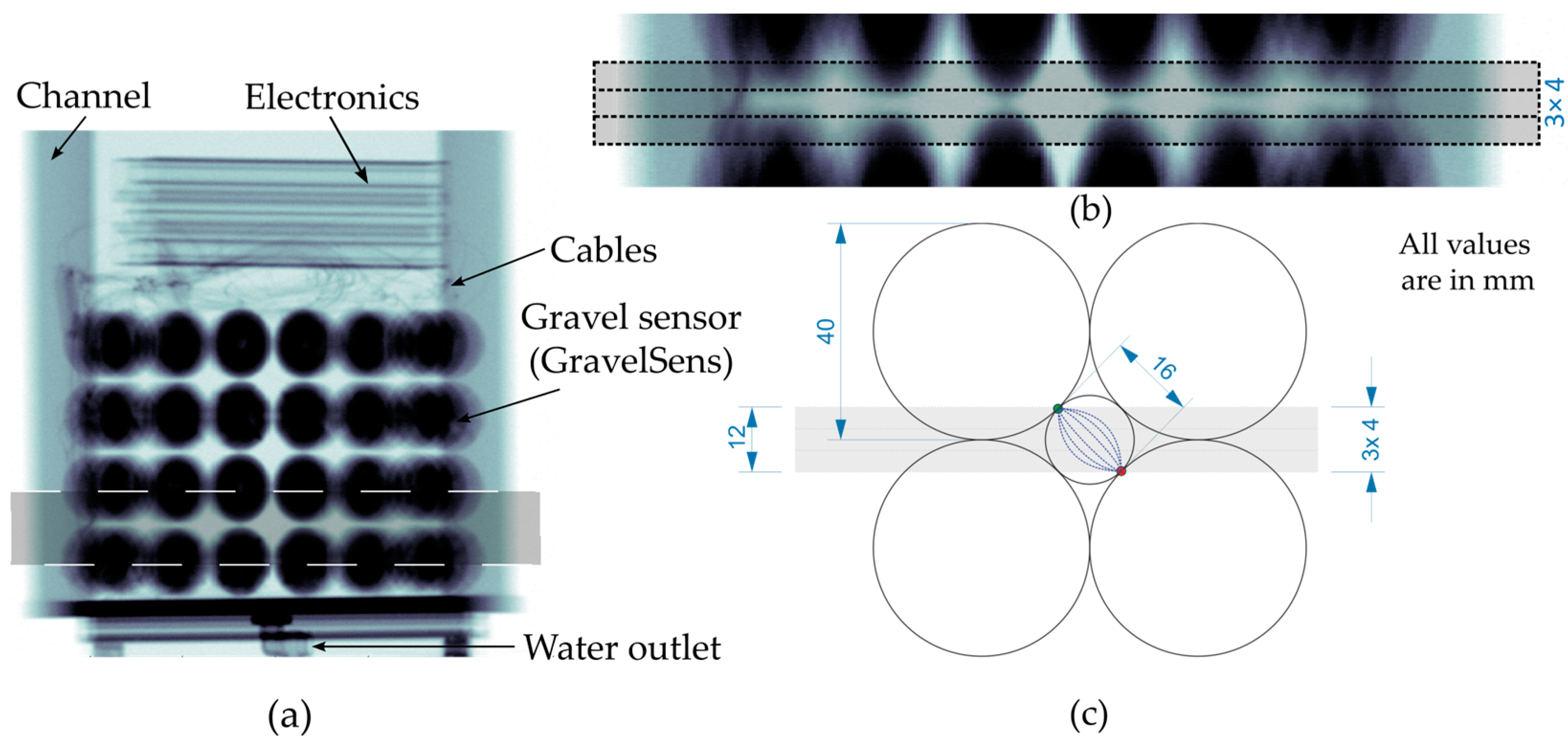
2.2. Gravel Sensor Design and Overview
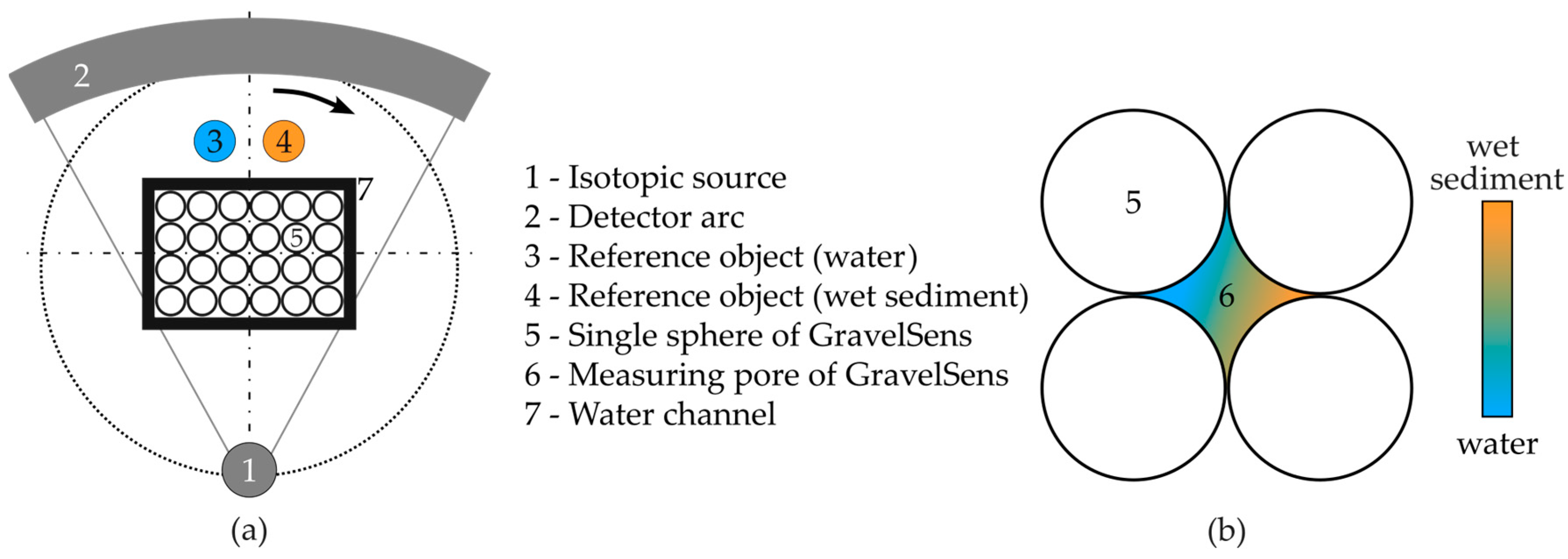
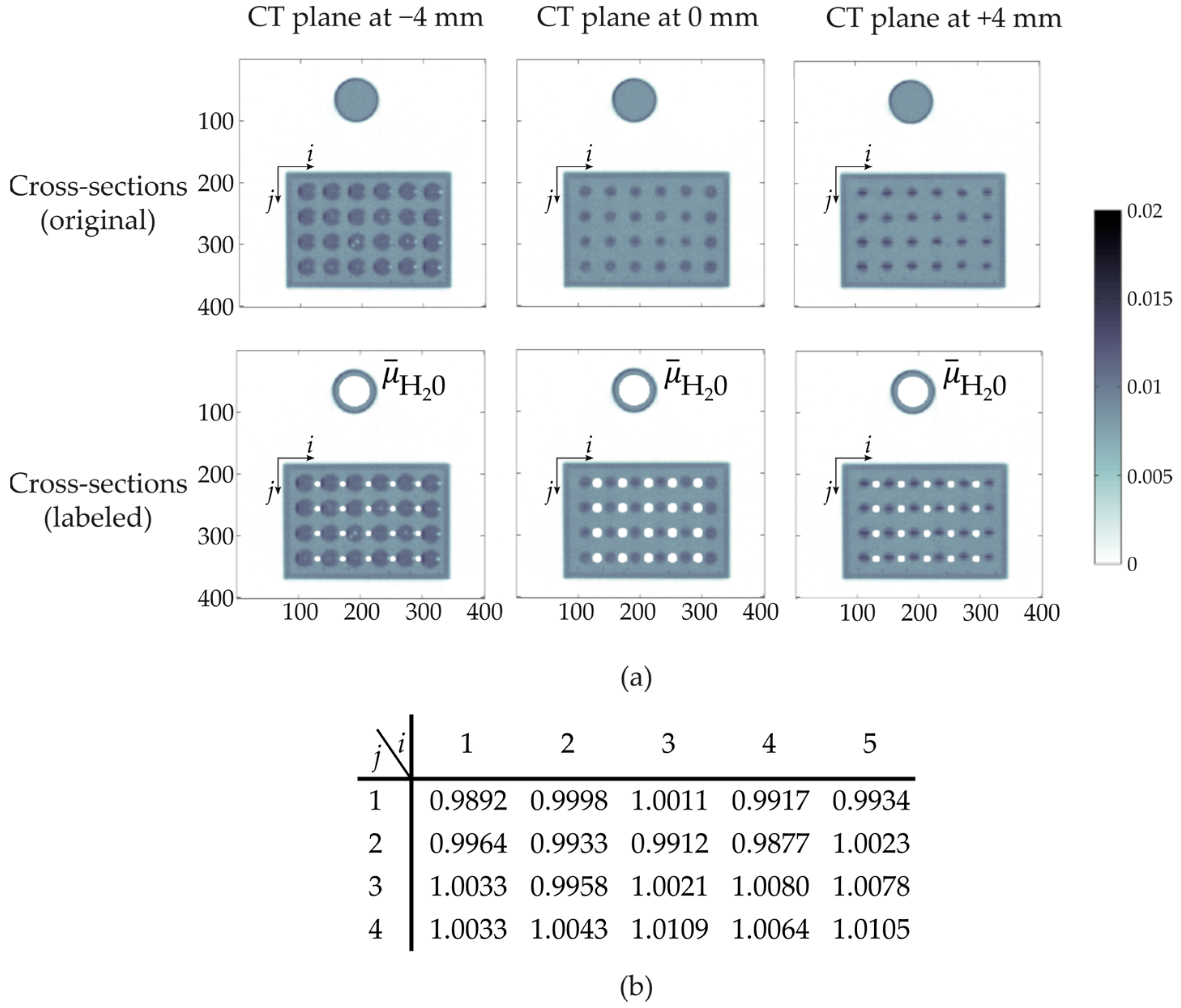
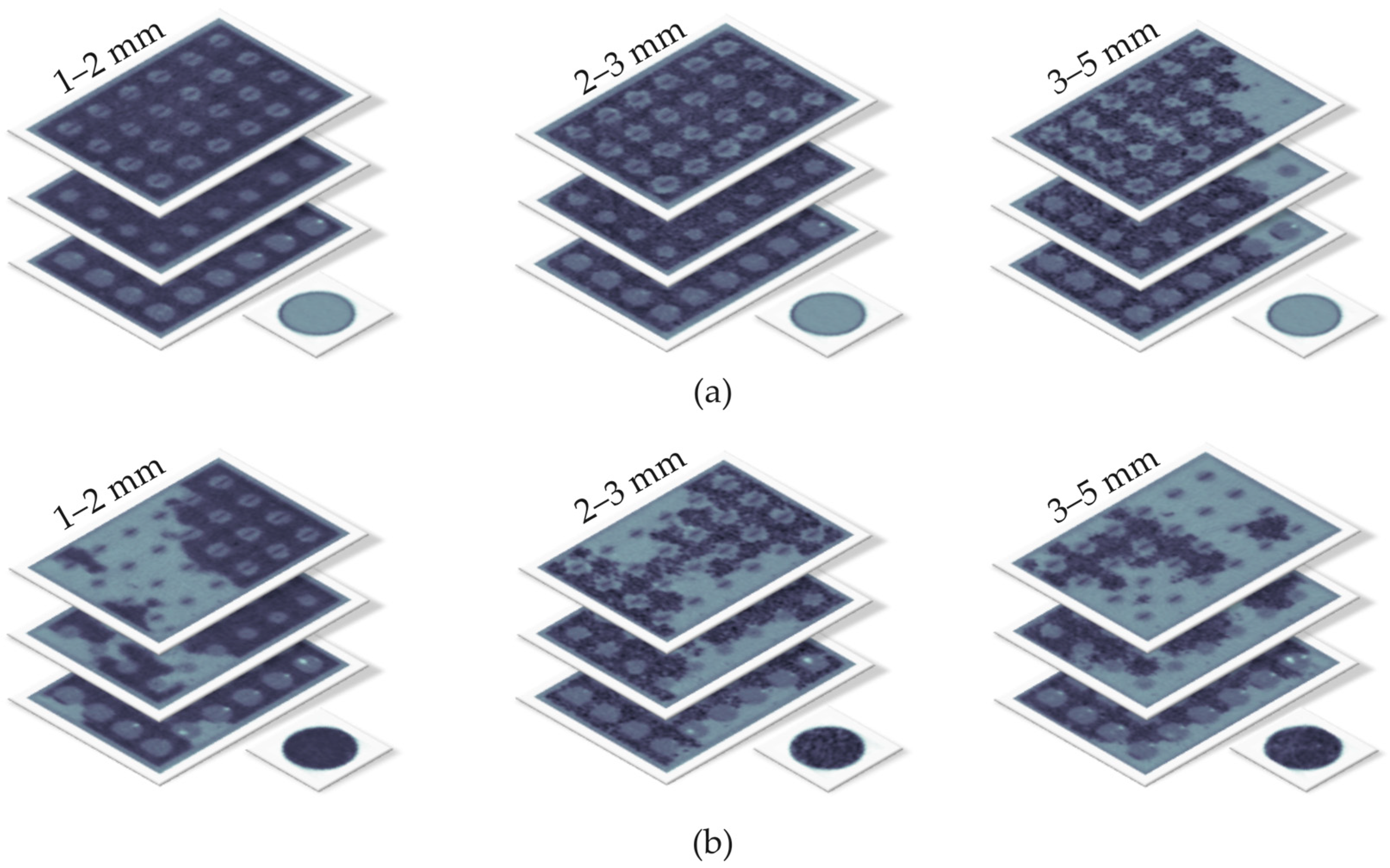
2.3. Gamma Ray Computed Tomography Scanning and Data Processing
3. Experiments and Results
3.1. Gamma CT Setup and GravelSens Accuracy Assessment
3.2. Validation Experiments
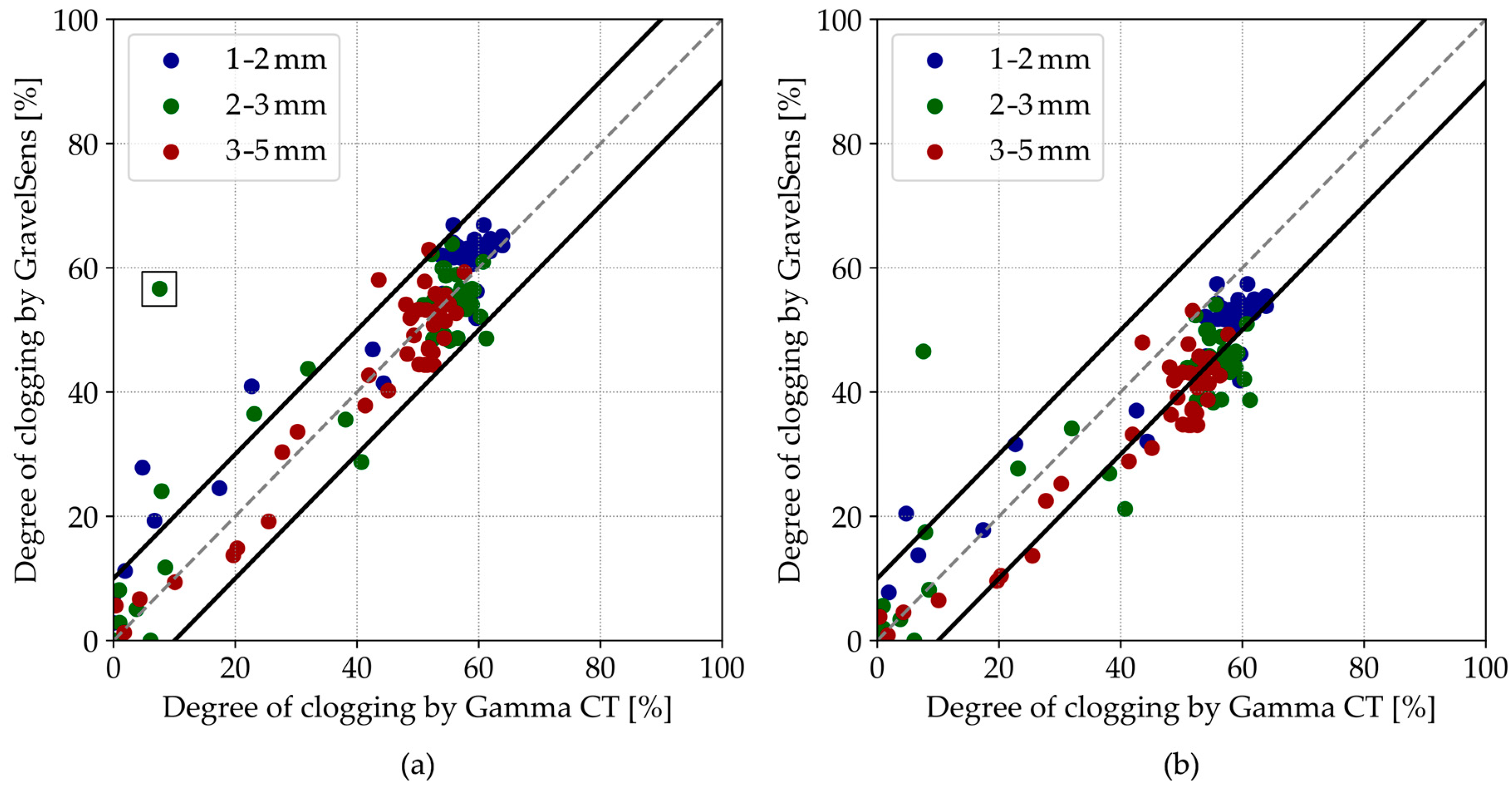
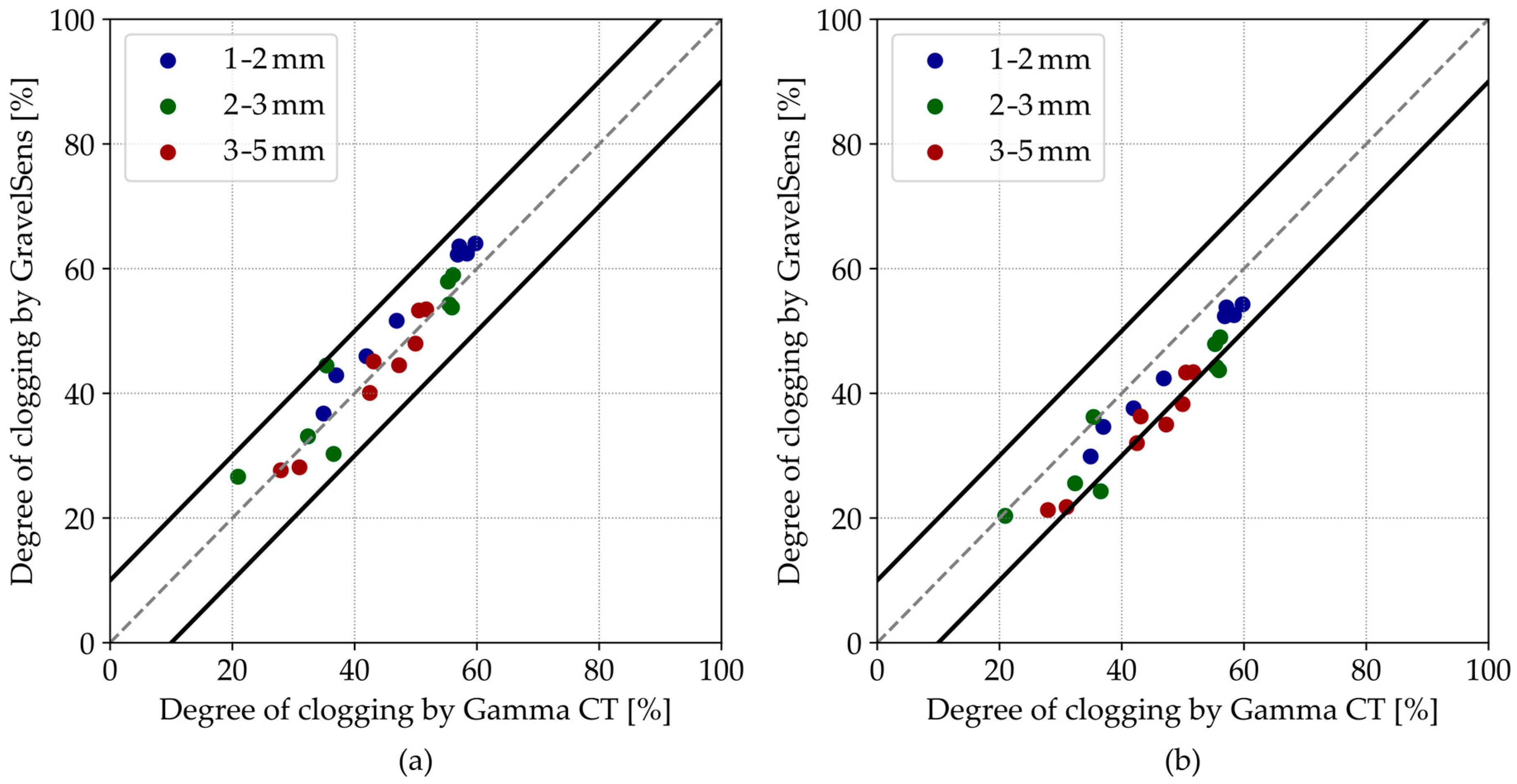
3.3. Comparisons of Gamma CT and GravelSens Measurements
4. Discussion and Outlook
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deng, J.; Camenen, B.; Legout, C.; Nord, G. Estimation of Fine Sediment Stocks in Gravel Bed Rivers Including the Sand Fraction. Sedimentology 2024, 71, 152–172. [Google Scholar] [CrossRef]
- McKenzie, M.; England, J.; Foster, I.D.L.; Wilkes, M.A. Abiotic Predictors of Fine Sediment Accumulation in Lowland Rivers. Int. J. Sediment Res. 2022, 37, 128–137. [Google Scholar] [CrossRef]
- Droppo, I.G.; D’Andrea, L.; Krishnappan, B.G.; Jaskot, C.; Trapp, B.; Basuvaraj, M.; Liss, S.N. Fine-Sediment Dynamics: Towards an Improved Understanding of Sediment Erosion and Transport. J. Soils Sediments 2015, 15, 467–479. [Google Scholar] [CrossRef]
- Dubuis, R.; De Cesare, G. The Clogging of Riverbeds: A Review of the Physical Processes. Earth-Sci. Rev. 2023, 239, 104374. [Google Scholar] [CrossRef]
- Owens, P.N.; Batalla, R.J.; Collins, A.J.; Gomez, B.; Hicks, D.M.; Horowitz, A.J.; Kondolf, G.M.; Marden, M.; Page, M.J.; Peacock, D.H.; et al. Fine-Grained Sediment in River Systems: Environmental Significance and Management Issues. River Res. Appl. 2005, 21, 693–717. [Google Scholar] [CrossRef]
- Romans, B.W.; Castelltort, S.; Covault, J.A.; Fildani, A.; Walsh, J.P. Environmental Signal Propagation in Sedimentary Systems across Timescales. Earth-Sci. Rev. 2016, 153, 7–29. [Google Scholar] [CrossRef]
- Syvitski, J.; Ángel, J.R.; Saito, Y.; Overeem, I.; Vörösmarty, C.J.; Wang, H.; Olago, D. Earth’s Sediment Cycle during the Anthropocene. Nat. Rev. Earth Environ. 2022, 3, 179–196. [Google Scholar] [CrossRef]
- Nearing, M.A.; Pruski, F.F.; O’Neal, M.R. Expected Climate Change Impacts on Soil Erosion Rates: A Review. J. Soil Water Conserv. 2004, 59, 43–50. [Google Scholar]
- Schälchli, U. The Clogging of Coarse Gravel River Beds by Fine Sediment. Hydrobiologia 1992, 235, 189–197. [Google Scholar] [CrossRef]
- Wharton, G.; Mohajeri, S.H.; Righetti, M. The Pernicious Problem of Streambed Colmation: A Multi-Disciplinary Reflection on the Mechanisms, Causes, Impacts, and Management Challenges. WIREs Water 2017, 4, e1231. [Google Scholar] [CrossRef]
- Dudley Williams, D.; Hynes, H.B.N. The Occurrence of Benthos Deep in the Substratum of a Stream. Freshw. Biol. 1974, 4, 233–256. [Google Scholar] [CrossRef]
- Mathers, K.L.; Doretto, A.; Fenoglio, S.; Hill, M.J.; Wood, P.J. Temporal Effects of Fine Sediment Deposition on Benthic Macroinvertebrate Community Structure, Function and Biodiversity Likely Reflects Landscape Setting. Sci. Total Environ. 2022, 829, 154612. [Google Scholar] [CrossRef] [PubMed]
- Collins, A.L.; Naden, P.S.; Sear, D.A.; Jones, J.I.; Foster, I.D.L.; Morrow, K. Sediment Targets for Informing River Catchment Management: International Experience and Prospects. Hydrol. Process. 2011, 25, 2112–2129. [Google Scholar] [CrossRef]
- Kemp, P.; Sear, D.; Collins, A.; Naden, P.; Jones, I. The Impacts of Fine Sediment on Riverine Fish. Hydrol. Process. 2011, 25, 1800–1821. [Google Scholar] [CrossRef]
- Gupta, L.K.; Pandey, M.; Raj, P.A.; Shukla, A.K. Fine Sediment Intrusion and Its Consequences for River Ecosystems: A Review. J. Hazard. Toxic Radioact. Waste 2023, 27, 04022036. [Google Scholar] [CrossRef]
- Jones, J.I.; Collins, A.L.; Naden, P.S.; Sear, D.A. The Relationship Between Fine Sediment and Macrophytes in Rivers. River Res. Appl. 2012, 28, 1006–1018. [Google Scholar] [CrossRef]
- Burton, G.A.; Johnston, E.L. Assessing Contaminated Sediments in the Context of Multiple Stressors. Environ. Toxicol. Chem. 2010, 29, 2625–2643. [Google Scholar] [CrossRef]
- André-Marie, D.; Mohammad, W.; Manon, V.; Florian, M.-B.; Brice, M.; Hervé, P.; Thierry, W.; Stefan, K.; Laurent, S. Environmental and Land Use Controls of Microplastic Pollution along the Gravel-Bed Ain River (France) and Its “Plastic Valley”. Water Res. 2023, 230, 119518. [Google Scholar] [CrossRef]
- Vercruysse, K.; Grabowski, R.C.; Rickson, R.J. Suspended Sediment Transport Dynamics in Rivers: Multi-Scale Drivers of Temporal Variation. Earth-Sci. Rev. 2017, 166, 38–52. [Google Scholar] [CrossRef]
- Teitelbaum, Y.; Dallmann, J.; Phillips, C.B.; Packman, A.I.; Schumer, R.; Sund, N.L.; Hansen, S.K.; Arnon, S. Dynamics of Hyporheic Exchange Flux and Fine Particle Deposition Under Moving Bedforms. Water Resour. Res. 2021, 57, e2020WR028541. [Google Scholar] [CrossRef]
- Duerdoth, C.P.; Arnold, A.; Murphy, J.F.; Naden, P.S.; Scarlett, P.; Collins, A.L.; Sear, D.A.; Jones, J.I. Assessment of a Rapid Method for Quantitative Reach-Scale Estimates of Deposited Fine Sediment in Rivers. Geomorphology 2015, 230, 37–50. [Google Scholar] [CrossRef]
- Lambert, C.P.; Walling, D.E. Measurement of Channel Storage of Suspended Sediment in a Gravel-Bed River. Catena 1988, 15, 65–80. [Google Scholar] [CrossRef]
- McNeil, W.J.; Ahnell, W.H. Success of Pink Salmon Spawning Relative to Size of Spawning Bed Materials; U.S. Department of the Interior, Bureau of Commercial Fisheries: Washington, DC, USA, 1964. [Google Scholar]
- Evans, E.; Wilcox, A.C. Fine Sediment Infiltration Dynamics in a Gravel-Bed River Following a Sediment Pulse. River Res. Appl. 2014, 30, 372–384. [Google Scholar] [CrossRef]
- Lisle, T.E. Sediment Transport and Resulting Deposition in Spawning Gravels, North Coastal California. Water Resour. Res. 1989, 25, 1303–1319. [Google Scholar] [CrossRef]
- Petts, G.E. Accumulation of Fine Sediment within Substrate Gravels along Two Regulated Rivers, UK. Regul. Rivers Res. Manag. 1988, 2, 141–153. [Google Scholar] [CrossRef]
- Stocker, Z.S.J.; Williams, D.D. Freezing Core Method for Describing the Vertical Distribution of Sediments in a Streambed. Limnol. Oceanogr. 1972, 17, 136–138. [Google Scholar] [CrossRef]
- Noack, M. Modelling Approach for Interstitial Sediment Dynamics and Reproduction of Gravel-Spawning Fish. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2012. [Google Scholar]
- Sear, D.A. Fine Sediment Infiltration into Gravel Spawning Beds within a Regulated River Experiencing Floods: Ecological Implications for Salmonids. Regul. Rivers Res. Manag. 1993, 8, 373–390. [Google Scholar] [CrossRef]
- Soulsby, C.; Youngson, A.F.; Moir, H.J.; Malcolm, I.A. Fine Sediment Influence on Salmonid Spawning Habitat in a Lowland Agricultural Stream: A Preliminary Assessment. Sci. Total Environ. 2001, 265, 295–307. [Google Scholar] [CrossRef] [PubMed]
- Zimmermann, A.E.; Lapointe, M. Intergranular Flow Velocity through Salmonid Redds: Sensitivity to Fines Infiltration from Low Intensity Sediment Transport Events. River Res. Appl. 2005, 21, 865–881. [Google Scholar] [CrossRef]
- Franssen, J.; Lapointe, M.; Magnan, P. Geomorphic Controls on Fine Sediment Reinfiltration into Salmonid Spawning Gravels and the Implications for Spawning Habitat Rehabilitation. Geomorphology 2014, 211, 11–21. [Google Scholar] [CrossRef]
- Maltauro, R.; Stone, M.; Collins, A.L.; Krishnappan, B.G. Challenges in Measuring Fine Sediment Ingress in Gravel-Bed Rivers Using Retrievable Sediment Trap Samplers. River Res. Appl. 2024, 40, 341–352. [Google Scholar] [CrossRef]
- Wooster, J.K.; Dusterhoff, S.R.; Cui, Y.; Sklar, L.S.; Dietrich, W.E.; Malko, M. Sediment Supply and Relative Size Distribution Effects on Fine Sediment Infiltration into Immobile Gravels. Water Resour. Res. 2008, 44, W03424. [Google Scholar] [CrossRef]
- Gibson, S.; Abraham, D.; Heath, R.; Schoellhamer, D. Bridging Process Threshold for Sediment Infiltrating into a Coarse Substrate. J. Geotech. Geoenviron. Eng. 2010, 136, 402–406. [Google Scholar] [CrossRef]
- Gibson, S.; Heath, R.; Abraham, D.; Schoellhamer, D. Visualization and Analysis of Temporal Trends of Sand Infiltration into a Gravel Bed. Water Resour. Res. 2011, 47, W12601. [Google Scholar] [CrossRef]
- Herrero, A.; Berni, C.; Camenen, B. Laboratory Analysis on Silt Infiltration into a Gravel Bed. In Proceedings of the 36th IAHR World Congress, The Hague, The Netherlands, 28 June–3 July 2015. 9p. [Google Scholar]
- Carling, P.A. Deposition of Fine and Coarse Sand in an Open-Work Gravel Bed. Can. J. Fish. Aquat. Sci. 1984, 41, 263–270. [Google Scholar] [CrossRef]
- Deng, J.; Drevet, T.; Pénard, L.; Camenen, B. Fine Sediment Dynamics over a Gravel Bar. Part 1: Validation of a New Image-Based Segmentation Method. Catena 2023, 225, 106978. [Google Scholar] [CrossRef]
- Lisle, T.E.; Eads, R.E. Methods to Measure Sedimentation of Spawning Gravels; Research Note PSW-411; Pacific Southwest Research Station, Forest Service, U.S. Department of Agriculture: Berkeley, CA, USA, 1991; 7p. [Google Scholar]
- Mathias Kondolf, G.; Lisle, T.E. Measuring Bed Sediment. In Tools in Fluvial Geomorphology; John Wiley & Sons, Ltd.: Chichester, UK, 2016; pp. 278–305. ISBN 978-1-118-64855-1. [Google Scholar]
- Descloux, S.; Datry, T.; Philippe, M.; Marmonier, P. Comparison of Different Techniques to Assess Surface and Subsurface Streambed Colmation with Fine Sediments. Int. Rev. Hydrobiol. 2010, 95, 520–540. [Google Scholar] [CrossRef]
- Naden, P.S.; Smith, B.; Jarvie, H.; Llewellyn, N.; Matthiessen, P.; Dawson, F.; Scarlett, P.; Hornby, D. Siltation in Rivers—Monitoring Techniques; English Nature: Peterborough, UK, 2003. [Google Scholar]
- Rex, J.F.; Carmichael, N.B. Guidelines for Monitoring Fine Sediment Deposition in Streams; Field Test Edition; Resources Information Standards Committee: Victoria, BC, Canada, 2002; p. 56. [Google Scholar]
- Lakhanpal, G.; Black, J.R.; Casas-Mulet, R.; Arora, M.; Stewardson, M.J. Micro-Computed Tomography Scanning Approaches to Quantify, Parameterize and Visualize Bioturbation Activity in Clogged Streambeds: A Proof of Concept. River Res. Appl. 2023, 39, 734–744. [Google Scholar] [CrossRef]
- Mayar, M.A.; Haun, S.; Schmid, G.; Wieprecht, S.; Noack, M. Measuring Vertical Distribution and Dynamic Development of Sediment Infiltration under Laboratory Conditions. J. Hydraul. Eng. 2022, 148, 04022008. [Google Scholar] [CrossRef]
- Haynes, H.; Vignaga, E.; Holmes, W.M. Using Magnetic Resonance Imaging for Experimental Analysis of Fine-Sediment Infiltration into Gravel Beds. Sedimentology 2009, 56, 1961–1975. [Google Scholar] [CrossRef]
- Mayar, M.A.; Schmid, G.; Wieprecht, S.; Noack, M. Proof-of-Concept for Nonintrusive and Undisturbed Measurement of Sediment Infiltration Masses Using Gamma-Ray Attenuation. J. Hydraul. Eng. 2020, 146, 04020032. [Google Scholar] [CrossRef]
- Prasser, H.-M.; Böttger, A.; Zschau, J. A New Electrode-Mesh Tomograph for Gas–Liquid Flows. Flow Meas. Instrum. 1998, 9, 111–119. [Google Scholar] [CrossRef]
- Silva, M.J.D.; Schleicher, E.; Hampel, U. Capacitance Wire-Mesh Sensor for Fast Measurement of Phase Fraction Distributions. Meas. Sci. Technol. 2007, 18, 2245. [Google Scholar] [CrossRef]
- Velasco Peña, H.F.; Rodriguez, O.M.H. Applications of Wire-Mesh Sensors in Multiphase Flows. Flow Meas. Instrum. 2015, 45, 255–273. [Google Scholar] [CrossRef]
- Tompkins, C.; Prasser, H.-M.; Corradini, M. Wire-Mesh Sensors: A Review of Methods and Uncertainty in Multiphase Flows Relative to Other Measurement Techniques. Nucl. Eng. Des. 2018, 337, 205–220. [Google Scholar] [CrossRef]
- dos Santos, E.N.; Schleicher, E.; Reinecke, S.; Hampel, U.; Silva, M.J.D. Quantitative Cross-Sectional Measurement of Solid Concentration Distribution in Slurries Using a Wire-Mesh Sensor. Meas. Sci. Technol. 2015, 27, 015301. [Google Scholar] [CrossRef]
- Hampel, U.; Babout, L.; Banasiak, R.; Schleicher, E.; Soleimani, M.; Wondrak, T.; Vauhkonen, M.; Lähivaara, T.; Tan, C.; Hoyle, B.; et al. A Review on Fast Tomographic Imaging Techniques and Their Potential Application in Industrial Process Control. Sensors 2022, 22, 2309. [Google Scholar] [CrossRef]
- Li, Y.; Wu, N.; Liu, C.; Chen, Q.; Ning, F.; Wang, S.; Hu, G.; Gao, D. Hydrate Formation and Distribution within Unconsolidated Sediment: Insights from Laboratory Electrical Resistivity Tomography. Acta Oceanol. Sin. 2022, 41, 127–136. [Google Scholar] [CrossRef]
- Wire-Mesh Sensors—Helmholtz-Zentrum Dresden-Rossendorf, HZDR. Available online: https://www.hzdr.de/db/Cms?pOid=25191&pNid=393 (accessed on 16 July 2024).
- Ziauddin, M.; Schleicher, E.; Trtik, P.; Knüpfer, L.; Skrypnik, A.; Lappan, T.; Eckert, K.; Heitkam, S. Comparing Wire-Mesh Sensor with Neutron Radiography for Measurement of Liquid Fraction in Foam. J. Phys. Condens. Matter 2022, 35, 015101. [Google Scholar] [CrossRef] [PubMed]
- Prasser, H.-M.; Häfeli, R. Signal Response of Wire-Mesh Sensors to an Idealized Bubbly Flow. Nucl. Eng. Des. 2018, 336, 3–14. [Google Scholar] [CrossRef]
- Whiting, P.J.; King, J.G. Surface Particle Sizes on Armoured Gravel Streambeds: Effects of Supply and Hydraulics. Earth Surf. Process. Landf. 2003, 28, 1459–1471. [Google Scholar] [CrossRef]
- Billi, P.; Paris, E. Bed Sediment Characterization in River Engineering Problems. In Erosion and Sediment Transport Monitoring Programmes in River Basins, Proceedings of the Oslo Symposium, Oslo, Norway, 24–28August 1992; IAHS Publication: Wallingford, UK, 1992. [Google Scholar]
- Hampel, U.; Bieberle, A.; Hoppe, D.; Kronenberg, J.; Schleicher, E.; Sühnel, T.; Zimmermann, F.; Zippe, C. High Resolution Gamma Ray Tomography Scanner for Flow Measurement and Non-Destructive Testing Applications. Rev. Sci. Instrum. 2007, 78, 103704. [Google Scholar] [CrossRef] [PubMed]
- Bieberle, A.; Schlottke, J.; Spies, A.; Schultheiss, G.; Kühnel, W.; Hampel, U. Hydrodynamics Analysis in Micro-Channels of a Viscous Coupling Using Gamma-Ray Computed Tomography. Flow Meas. Instrum. 2015, 45, 288–297. [Google Scholar] [CrossRef]
- Neumann, M.; Schäfer, T.; Bieberle, A.; Hampel, U. An Experimental Study on the Gas Entrainment in Horizontally and Vertically Installed Centrifugal Pumps. J. Fluids Eng. 2016, 138, 091301. [Google Scholar] [CrossRef]
- Rollbusch, P.; Becker, M.; Ludwig, M.; Bieberle, A.; Grünewald, M.; Hampel, U.; Franke, R. Experimental Investigation of the Influence of Column Scale, Gas Density and Liquid Properties on Gas Holdup in Bubble Columns. Int. J. Multiph. Flow 2015, 75, 88–106. [Google Scholar] [CrossRef]
- Pyka, T.; Bieberle, A.; Loll, R.; Held, C.; Schubert, M.; Schembecker, G. Distributor Effects on Liquid Hold-Up in Rotating Packed Beds. Ind. Eng. Chem. Res. 2024, 63, 2000–2010. [Google Scholar] [CrossRef]
- Loll, R.; Nordhausen, L.; Bieberle, A.; Schubert, M.; Pyka, T.; Koop, J.; Held, C.; Schembecker, G. Analysis of Flow Patterns in Structured Zickzack Packings for Rotating Packed Beds Using γ-Ray Computed Tomography. Ind. Eng. Chem. Res. 2023, 62, 15625–15634. [Google Scholar] [CrossRef]
- Bieberle, A.; Schubert, M.; da Silva, M.J.; Hampel, U. Measurement of Liquid Distributions in Particle Packings Using Wire-Mesh Sensor versus Transmission Tomographic Imaging. Ind. Eng. Chem. Res. 2010, 49, 9445–9453. [Google Scholar] [CrossRef]
- Pavelic, P.; Dillon, P.J.; Mucha, M.; Nakai, T.; Barry, K.E.; Bestland, E. Laboratory Assessment of Factors Affecting Soil Clogging of Soil Aquifer Treatment Systems. Water Res. 2011, 45, 3153–3163. [Google Scholar] [CrossRef]
- Xiao, Y.; Han, Y.; Jia, F.; Liu, H.; Li, G.; Chen, P.; Meng, X.; Bai, S. Research on Clogging Mechanisms of Bulk Materials Flowing Trough a Bottleneck. Powder Technol. 2021, 381, 381–391. [Google Scholar] [CrossRef]
- Fraige, F.Y.; Langston, P.A.; Chen, G.Z. Distinct Element Modelling of Cubic Particle Packing and Flow. Powder Technol. 2008, 186, 224–240. [Google Scholar] [CrossRef]
- Leverenz, H.L.; Tchobanoglous, G.; Darby, J.L. Clogging in Intermittently Dosed Sand Filters Used for Wastewater Treatment. Water Res. 2009, 43, 695–705. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Sediment Size [mm] | Filling [%] * | Measurement Points [n] | Effective Porosity [-] |
|---|---|---|---|---|
| 1.1 | 1–2 | 53.8–61.8 | 20 | 0.36 |
| 2–3 | 52.3–60.7 | 20 | 0.38 | |
| 3–5 | 1.7–53.8 | 20 | 0.40 | |
| 1.2 | 1–2 | 0.0–63.9 | 20 | 0.36 |
| 2–3 | 0.0–61.2 | 20 | 0.38 | |
| 3–5 | 0.4–57.7 | 20 | 0.40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koca, K.; Schleicher, E.; Bieberle, A.; Haun, S.; Wieprecht, S.; Noack, M. GravelSens: A Smart Gravel Sensor for High-Resolution, Non-Destructive Monitoring of Clogging Dynamics. Sensors 2025, 25, 536. https://doi.org/10.3390/s25020536
Koca K, Schleicher E, Bieberle A, Haun S, Wieprecht S, Noack M. GravelSens: A Smart Gravel Sensor for High-Resolution, Non-Destructive Monitoring of Clogging Dynamics. Sensors. 2025; 25(2):536. https://doi.org/10.3390/s25020536
Chicago/Turabian StyleKoca, Kaan, Eckhard Schleicher, André Bieberle, Stefan Haun, Silke Wieprecht, and Markus Noack. 2025. "GravelSens: A Smart Gravel Sensor for High-Resolution, Non-Destructive Monitoring of Clogging Dynamics" Sensors 25, no. 2: 536. https://doi.org/10.3390/s25020536
APA StyleKoca, K., Schleicher, E., Bieberle, A., Haun, S., Wieprecht, S., & Noack, M. (2025). GravelSens: A Smart Gravel Sensor for High-Resolution, Non-Destructive Monitoring of Clogging Dynamics. Sensors, 25(2), 536. https://doi.org/10.3390/s25020536