Abstract
The emergence of 6G-enabled Internet of Vehicles (IoV) promises to revolutionize mobility and connectivity, integrating vehicles into a mobile Internet of Things (IoT)-oriented wireless sensor network (WSN). Meanwhile, 5G technologies and mobile edge computing further support this vision by facilitating real-time connectivity and empowering massive access to the Internet. Within this context, IoT-oriented WSNs play a crucial role in intelligent transportation systems, offering affordable alternatives for traffic monitoring and management. Efficient sensor selection thus represents a critical concern while deploying WSNs on urban networks. In this paper, we provide an overview of such a notably hard problem. The contribution is twofold: (i) surveying state-of-the-art model-based techniques for efficient sensor selection in traffic flow monitoring, emphasizing challenges of sensor placement, and (ii) advocating for the development of data-driven methodologies to enhance sensor deployment efficacy and traffic modeling accuracy. Further considerations underscore the importance of data-driven approaches for adaptive transportation systems aligned with the IoV paradigm.
1. Introduction
The advent of 5G technology has reshaped communication networks, improving capacity, latency, and mobility support [1]. Beyond enhanced connectivity, 5G enables real-time interaction among a vast number of Internet of Things (IoT) devices, fostering innovation across domains such as healthcare and transportation [2]. Among its groundbreaking features, 5G aims to extend mobility support to speeds exceeding 500 km/h for ground transportation, signifying a pivotal advancement in wireless communication standards [3]. A key enabler of this transformation is Mobile-Edge Computing (MEC), which decentralizes computing by bringing cloud capabilities closer to the network edge [4]. By reducing latency and enabling real-time network access, MEC is particularly valuable for mobility applications, including autonomous transportation [5].
Building on 5G, next-generation networks are expected to push connectivity further, paving the way for a 6G-enabled Internet of Vehicles (IoV) [6]. Future 6G networks will introduce disruptive technologies such as terahertz and optical communications, enhancing data rates and spectral efficiency [7]. In this evolving landscape, the IoV envisions vehicles as intelligent agents equipped with sensors, computing units, and communication interfaces, enabling seamless interaction with infrastructure, other vehicles, and road users through vehicle-to-everything (V2X) communication. To support real-time decision-making, AI-driven network intelligence will play a crucial role, while the increasing connectivity demands will require robust security mechanisms to mitigate cyber threats.
Within intelligent transportation systems (ITSs), wireless sensor networks (WSNs) are transforming traffic monitoring and management by offering a scalable, cost-effective alternative to traditional wired sensors, which are often constrained by high installation costs and complexity [8]. By embedding small, wireless sensors into roadways and intersections, WSNs enable real-time traffic data collection, congestion management, and early warning systems for safety hazards, all while reducing infrastructure costs. Their applications range from parking monitoring to adaptive traffic control, providing accurate, high-density data that support dynamic decision-making. Moreover, as WSN technology evolves, its integration with vehicular networks holds significant potential, bridging the gap between vehicles and infrastructure to enable bidirectional traffic information exchange. This connectivity enhances situational awareness, optimizes route planning, and fosters proactive traffic management, paving the way for smarter, more sustainable urban mobility [9].
However, deploying sensors across entire road networks is often impractical due to cost constraints. To address this, IoT-oriented WSNs leverage spatial and temporal correlations to estimate traffic conditions at unobserved locations, reducing the number of required sensors while maintaining accurate traffic monitoring. Advanced algorithms and machine learning techniques further enhance predictive capabilities, enabling authorities to anticipate congestion and dynamically adjust traffic flow [10,11,12,13,14,15]. In addition, IoT-oriented WSNs facilitate seamless integration with emerging technologies such as connected and autonomous vehicles, enabling dynamic routing, collision avoidance, and cooperative driving strategies [16,17,18].
Despite these advancements, sensor deployment for traffic flow monitoring remains a fundamental challenge. In the literature, the so-called street sensor selection problem (also known as the traffic sensor location problem) focuses on determining the optimal number and placement of sensors for effective traffic data collection [19]. Given the impracticality of equipping all network streets and intersections with sensors, finding optimal sensor locations is crucial for traffic flow estimation and congestion management.
Contribution and Outline
Selecting optimal locations to deploy IoT-oriented WSNs within urban road networks typically presents an arduous task. Leveraging advanced modeling techniques and data analytics, transportation planners strive to compensate for factors such as cost-effectiveness, coverage requirements, and regulatory compliance. Given the complexities involved, achieving the ideal balance between sensor density, energy demand, cost considerations, and regulatory constraints remains an ongoing challenge in urban traffic management [20,21].
In light of the above considerations, the contribution of this review is twofold:
- (i)
- We survey state-of-the-art model-based techniques leveraging system observability for efficient sensor selection in traffic flow monitoring over urban road networks. Specifically, we address the challenges of sensor placement, emphasizing the importance of the above balancing factors.
- (ii)
- In response to the limitations of traditional traffic modeling, we advocate for the development of new data-driven methodologies based on network observability to bypass the need for explicit model design. We then highlight the potential of these approaches for enhancing sensor deployment efficacy, traffic modeling accuracy, and real-time scheduling, thus laying the groundwork for more adaptive transportation systems aligned with the IoV paradigm.
The remainder of the paper unfolds as follows. In Section 2, we emphasize the challenge of modeling complex transport systems and the importance of sensor locations for traffic flow monitoring. Section 3 delves into the technical intricacies of sensor placement within urban landscapes, exploring observability-based metrics and optimal sensor selection strategies, which represent the core focus of our review. Then, the discussion in Section 4 critically evaluates traditional traffic modeling versus data-driven methodologies, highlighting the potential efficacy of the latter, especially considering communication technology advancements. Finally, conclusions and future directions are sketched in Section 5, touching on continued investigation into novel observability-based metrics and data-driven strategies.
2. From Network Models to Sensor Selection for Traffic Monitoring
Traffic monitoring relies on an accurate representation of urban networks and an effective deployment of sensors to collect relevant data. The first step in this process is the development of a suitable network model that captures the key dynamics of traffic flow. Such models, which can be formulated at different levels of granularity, provide the foundation for understanding congestion patterns and predicting traffic conditions. Once a model is available, the challenge shifts to selecting an optimal set of sensors that ensures accurate and cost-effective monitoring of traffic states. In this section, we first introduce modeling approaches for urban networks, followed by a discussion on the role of sensor selection strategies for effective traffic flow monitoring.
2.1. Modeling and Monitoring Urban Networks
A transport system is a complex system, made up of multiple elements linked by mutual nonlinear interactions and feedback cycles. Therefore, modeling such a system is challenging, in particular for urban networks, where congestion significantly affects the performance of the system. Specifically, a transport system consists of two main inter-related elements: travel demand and transport supply. The former is derived from the needs of the people to move to different places, and depends on short-term mobility choices (e.g., frequency, travel means, time, destination, and path) and long-term decisions (e.g., car ownership and public transport subscription). The latter is composed of physical infrastructures (e.g., roads and parking spaces), services (e.g., public transport lines), regulations (e.g., circulation and parking rules), and prices (e.g., fuel cost, tolls, and parking prices). Travel demand and transport supply are mutually influenced: travel choices depend on the level of service of the transport supply, which is affected by travel demand flows. Modeling a transport system generally requires the development of a supply model, representing the characteristics of the network, a demand model, estimating the travel demand, and an assignment model, calculating flows on each network element, by modeling the mutual inter-dependencies between supply and demand [22].
In turn, an urban network can be divided into several links, that are road segments, to which a time and/or monetary traveling cost is associated through specific flow-cost functions. Different approaches have been developed to model a transport system; however, their main goal is to find an equilibrium of the system, i.e., a configuration in which demand, path, and link flows are consistent with the travel costs that they generate in the network. Assignment models can be classified according to various factors. Uncongested and congested network assignment models assume that the cost of traveling on a link is respectively independent and dependent on flows on that link. Moreover, deterministic models assume that drivers have a perfect knowledge of travel costs, thereby generating deterministic path choices; on the contrary, stochastic models explicitly model the variability in drivers’ perceptions of costs, thus accounting for probabilistic travel choices. Furthermore, a constant within-period demand and supply is assumed by static assignment models, describing a steady-state condition of the transport system; within-period dynamic assignment models allow to reproduce the time evolution of the network conditions by explicitly modeling the effects of traffic dynamics typical of real transport systems.
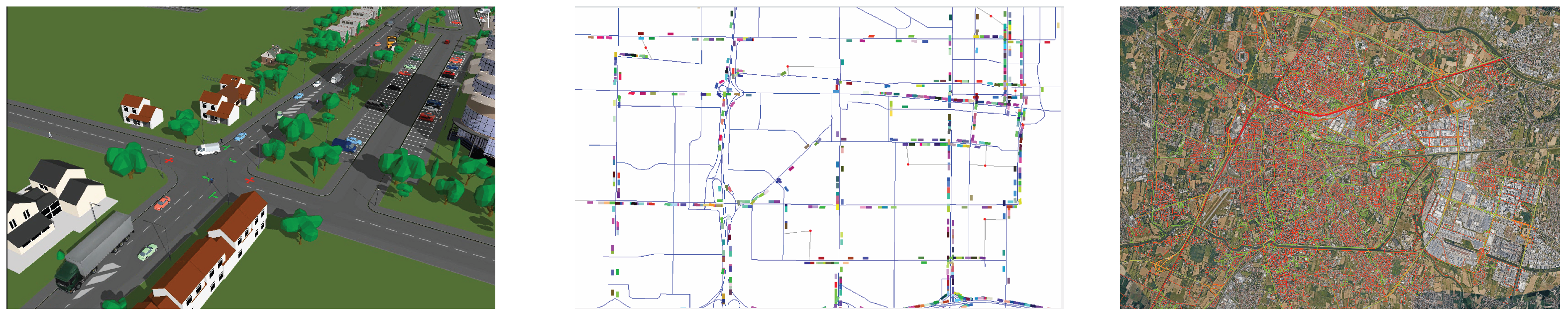
Traffic flows in a network can be modeled through macroscopic, mesoscopic, and microscopic traffic simulation models [23] (see Figure 1), whose aim is to find a configuration in which demand, path, and link flows are consistent with the travel costs that they generate in the network [24]:
- Macroscopic models are based on a continuum traffic flow theory, modeling the temporal and spatial evolution of the fundamental variables describing the macroscopic flows, i.e., volume, speed, and density.
- Microscopic models are focused on the simulation of the movement of each individual vehicle, by modeling its actions in response to the surrounding flows, through car-following, lane-changing, and gap-acceptance submodels.
- Mesoscopic models are hybrid models; they consider a single vehicle or a group of vehicles, whose movement is based on laws describing the relationship among aggregate flow variables (e.g., average speed).
All of them share in common the travel demand expressed as an origin–destination matrix, representing the number of trips for each pair of network zones. However, the time horizon reference of this matrix is different among the three model types: a unique demand matrix, constant over the entire simulation period, is used for macroscopic models, whereas a set of matrices, defined for shorter time periods, is provided for meso- and microscopic models, to better approximate the variations in travel demand. Moreover, the three models differ according to the network representation: on the one hand, macro- and mesoscopic models adopt an extended and aggregated representation of nodes and links (e.g., defining capacity, number of lanes, and volume-delay function); on the other hand, microscopic models require a detailed characterization of these elements (e.g., defining lane with a speed limit, signal settings, or specific stop rules at intersections) [25].

Figure 1.
From left to right, the representations of traffic models at different scale levels: microscale [26], mesoscale [27], macroscale [27].
Figure 1.
From left to right, the representations of traffic models at different scale levels: microscale [26], mesoscale [27], macroscale [27].
2.2. The Role of Sensor Selection in Traffic Flow Monitoring
The general aim of traffic sensors is to count the number of vehicles on a road section or area of the network, in order to transform these data into traffic flows [28]. Despite this oversimplified goal, obtaining information from traffic sensors is essential to efficiently plan and manage transportation systems [29]. The accuracy and reliability of such a process are highly dependent on the quantity and quality of input data provided by monitoring sensors [30]. However, in practical applications, the installation of traffic sensors in the entire network is infeasible, due to budgetary constraints [31]. Therefore, identifying the optimal location of a limited number of monitoring devices becomes of primary importance to obtain a trade-off between estimation accuracy of traffic states and cost associated with the implementation of a sensor system [32]. For these reasons, various traffic sensor location problems were proposed with different aims [19].
Forecasting the impacts of changes in transportation networks and travel demand policy is the main aim of traffic simulations [33]. As described in Section 2.1, one of the essential inputs of such simulation models is an origin–destination matrix. A direct estimation of this matrix based on on-site surveys (such as number plate recognition, road-side surveys, or household interviews) is often very expensive in terms of costs and time effort [34]. For this reason, many previous authors have focused on the optimization of the location of traffic monitoring sensors to obtain the most accurate and reliable estimate of origin–destination matrices [35].
Moreover, traffic flows on the entire network can be determined based on the recorded volumes of vehicles, provided by sensors installed in a limited number of locations, leading to a flow observability problem and a link flow inference problem [19]. The solution to the first expands the information on a subset of roads, through the application of flow propagation rules and assuming a predefined traveler route choice behavior [36]. On the other hand, the solution to the second helps infer link flows, without the need for prior information about route choice proportions [37]. Furthermore, the combination of data from multiple traffic sensors can be adopted to estimate network performances. In particular, previous authors have developed sensor location problems to derive travel time on roads, considering the dynamic nature of traffic [38]. In addition, information from fixed sensors can be used to infer congestion levels on the network [39].
Further applications of the traffic sensor location problem include path reconstruction, aiming at understanding how observed flows from a monitoring system can be used to identify the paths among different origin–destination pairs [40]. Moreover, recorded volumes of vehicles approaching a road intersection can be considered as input of a traffic light system, where traffic light phases and operations are optimized to minimize congestion and users’ delay [41].
For these reasons, defining the optimal location of sensors monitoring traffic volumes is essential to evaluate the performance of the system, both at the local and network level. In particular, monitoring sensors can be adopted to analyze the current conditions of the road where they are installed, by detecting vehicle queues or travel time in a corridor [13,14]. In addition, sensors can be used to assess the conditions of the entire network [42] by applying traffic simulation models [43] or specific techniques inferring network states from local data provided by monitoring devices [19].
3. Overview of the Street Sensor Selection Problem
In this section, we explore techniques and challenges related to sensor selection within a WSN for traffic monitoring over road networks. The solutions to this class of problems aim to identify the most suitable sensors from a pool of available options in order to perform efficient monitoring. To this aim, we shall review the notion of observability, examine a number of observability-based metrics, and discuss the major advances obtained so far in the attempt to solve similar yet diverse versions of the street sensor selection problem.
3.1. Mathematical Preliminaries
Section 2.2 can be summarized as follows: once a network model is available, traffic flow monitoring through sensor placement can be then carried out. Since urban networks can be described, for instance, through state-space models, it is useful to recall some fundamental concepts of System Theory (see, e.g., [44], for a reference on the topic) related to linear time-invariant (LTI) systems and their representation. In addition, the concept of submodularity is defined subsequently.
3.1.1. LTI Systems and State-Space Representations
A system Σ is a function whose domain and codomain are sets of signals, i.e.,
where and are said to be the input set and output set, respectively. A system Σ is said to be linear if, for any couple of signals and and for all , the following property holds:
Denoting with the time-shift operator, a system is said to be time-invariant if, for any , one has
It is well known that convolutional linear time-invariant (LTI) systems (for a convolutional system, the output is obtained as the convolution operation between its impulse response and a given input (see, for further details [45])) admit a description consisting of a system of first-order difference equations, called state space. By defining the n-dimensional signal , named the state, this type of representation captures the system’s dynamics, which can be expressed in the following standard form (we assume the time domain to be discrete throughout this paper):
In particular, denotes the state vector describing the system’s internal state with a given initial condition , while and denote the input and output vectors, respectively. More specifically, the system’s dynamics are governed by the constant matrices , , , and : matrix A represents the relationship between the current state and the future state of the system, while B describes how the input influences the state , matrix C links the system’s state to the observable output , and, finally, D describes the direct effect of the input, if present, on the output. A common shorthand notation for the system in (4) is therefore given by the ordered tuple .
The natural response and the forced response of a system Σ can be obtained in the first place by calculating the general solution of the system described by Equation (4), which is expressed as
The natural evolution of the state is thus yielded by the term , while the remaining terms form the forced evolution of the state . Consequently, in accordance with (5), the natural response of an LTI system is defined as
The signal (6) describes the system’s output when there are no active inputs and it is determined solely by the system’s initial conditions and the internal dynamics defined by the system’s state equations. On the other hand, the forced response of the LTI system describes the system’s output when inputs act upon it, reflecting the system’s reaction to nonzero inputs without being influenced by initial conditions. Hence, for an LTI system, the forced response is defined as
so that the relation
holds for all .
3.1.2. Set Functions
Sensor placement problems can be formulated as set function optimization problems. Given the finite set of potential sensor locations , a set function assigns a real number to each subset of . Then, a set function optimization problem can be formulated as
The aim is to select a -dimensional subset of that maximizes f. In general, this kind of combinatorial optimization problem is intractable in the case of very large set cardinality ; nonetheless, if the objective function f is monotone, optimization in (9) admits a greedy algorithm to find a solution. In particular, if f is also submodular, such a solution is achieved suboptimality within a guaranteed bound [46,47]. The notions of monotonicity and submodularity, along with that of modularity, are defined in the following lines.
Definition 1
(Monotone set function). A set function is monotone if, for all , it holds that
It is evident that monotone functions exhibit growth (in a broad sense) as any element is added to the current set .
Definition 2
((Sub)modular set function). A set function is called submodular if, for all subsets and elements , it holds that
If the equality in (11) holds strictly for all subsets and elements , then f is said to be modular.
Intuitively, the marginal value of a submodular function increases more with the addition of a new set member when the current size of the set is smaller (e.g., the function counting the number of covered subsets of a given space is monotone and submodular). On the other hand, for a modular function, the marginal value of adding an element to set is always the same, regardless of what is already in the set (e.g., the cardinality of a set is a monotone modular function). Clearly, all modular functions are also submodular. Lastly, it is crucial to note that submodular functions are not monotone in general. In this case, to maximize nonmonotone submodular functions, ad hoc heuristics or special techniques can be used (see, e.g., [48] for an in-depth discussion on that topic).
3.2. Observability-Based Metrics and Derivation of the Problem
In this investigation, we restrict our attention to the class of discrete-time LTI systems whose dynamics are usually described by the state-space models of the form (4). Recall that the dynamics of (4) are governed by the constant matrices , , , and (extensions of this theoretical framework are, of course, possible, e.g., by considering time-varying and/or state-input-dependent matrices), given the initial condition .
One of the most important properties of dynamic systems is observability, i.e., the possibility of reconstructing or estimating given the past input–output observations:
It is well known that observability can be proven to hold by checking the rank of the so-called observability matrix:
In particular, the system in (4) is observable if and only if
Example
Consider the state matrix
corresponding to a compartmental system and set
From the couples , the observability matrices are defined respectively for according to (13). It can be verified that and , even though selects six rows over the powers of A and selects just three rows in total. This is due to the fact that the minor
represents a maximal invariant subsystem, which behaves as a “trapped compartment”.
In general, if observability is shown to hold, a dynamic estimate (static estimates can be also obtained, but they are either available only after a certain time delay or, when computed in an open-loop fashion, they become unreliable/computationally demanding as t grows) for the state of (4) as t varies can be computed via the Luenberger estimator [49]
where is the initial state estimate (this value is set by either exploiting the presently available information on the system or relying on a sensible guess) and is a suitably chosen Luenberger observer gain. Specifically, the matrix L is selected so that the estimation error
vanishes as t grows, namely, the following dynamics are asymptotically stable:
Denoting with the spectral radius of a matrix (i.e., the maximum eigenvalue in modulus of the spectrum), it can be proven that the error dynamics (20) are asymptotically stable if and only if L satisfies
More precisely, given the system , there exists a state estimator (18) such that
if and only if Σ is detectable, namely Σ is either observable or the unobservable subsystem of Σ (the unobservable subsystem of Σ can be found by transforming its system matrices through a change of basis given by the null space of the observability matrix obtained from and its complement) is asymptotically stable.
Observability is then closely related to state estimation performance through certain metrics computed on the observability Gramian of order , defined as
Indeed, it is immediately verifiable that . It is also worth recalling that, if the matrix A is asymptotically stable, the infinite horizon observability Gramian
can be computed by solving the matrix Lyapunov equation
The interpretation of the observability Gramian (23) revolves around the quadratic form
which can be associated with the energy of the natural response induced by the initial state : the larger this quantity, the more observable the initial state is. Practically, cheaper sensing is required as an observability-Gramian-based metric indicates that the energy increases independently from the initial state . A few examples of such metrics are taken from [50,51,52,53], reported in the following list, and characterized in detail in Table 1:

Table 1.
Properties of metrics computed from the observability Gramian. A characterization with respect to eigenvalues of the observability Gramian or its transformations, such that , is also included in the second column. The third column displays whether a metric is monotonically increasing with respect to such a characterization and monotone according to Definition 1. The last two columns indicate whether a metric is submodular and/or modular according to Definition 2.
- : the rank of quantifies the dimension of the observable subspace.
- : the trace of scaled by the state dimension n is directly related to the average output energy and can be interpreted as the average observability in all directions of the state.
- : the condition number of (the condition number of a matrix is defined as the ratio between the maximum and minimum singular values of a given matrix) measures how balanced the observability is among all modes. It grows unbounded if the system is unobservable.
- : the minimum eigenvalue of is related to the hardest state components to observe; is zero for unobservable systems. Differently from , this metric enhances the robustness to sensor failure rather than system mode balancing.
- : whenever is invertible, the determinant of the observability Gramian is proportional to the volume of the ellipsoid containing the initial states that can be observed with one unit or less estimation energy.
- : whenever , the -norm of an LTI system is bounded. It can be proven that . The intuition is that more potent sensors usually output stronger signals, and this potency is captured by the -norm.
- : this can be intended as a volumetric variant of , as it computes the logarithm of the geometric mean of the axes of the observability Gramian ellipsoid skewed by B.
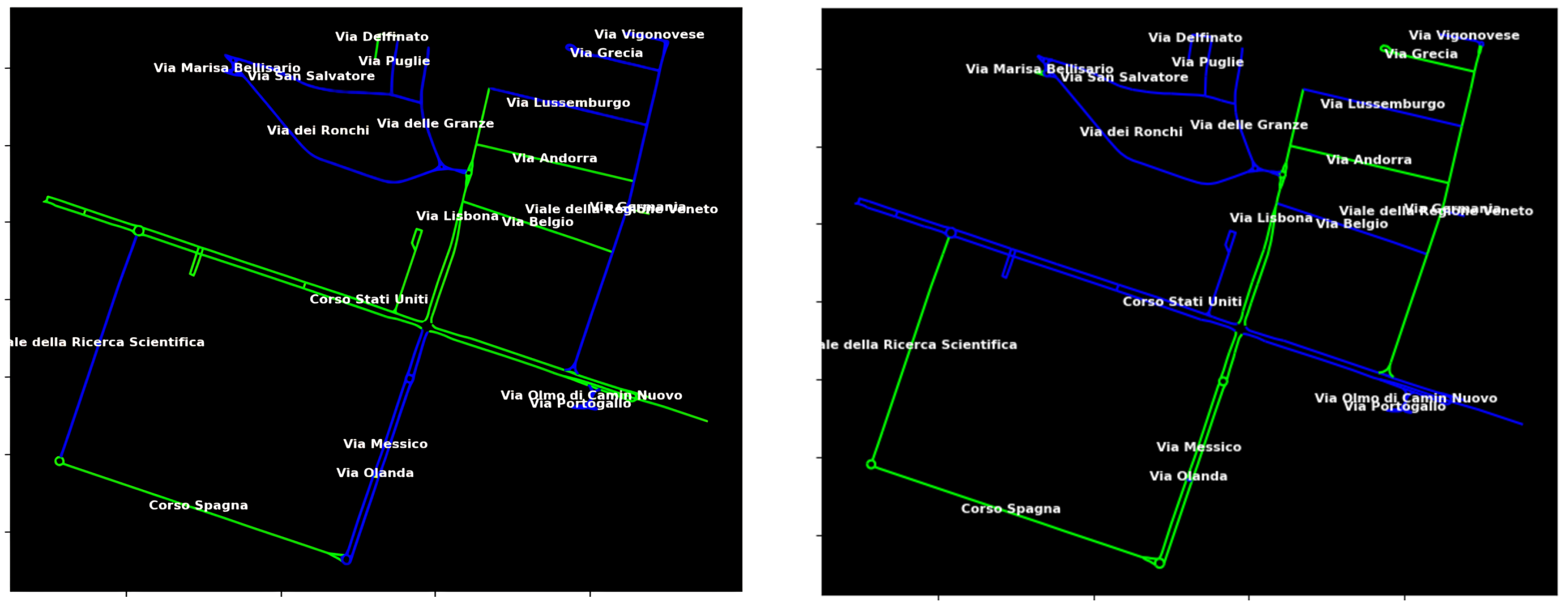
In light of this premise, the optimal sensor selection therefore consists of selecting a subset of , possibly redundant, sensors from a larger set of potential sensors in order to preserve the structural observability property of the entire traffic network. An illustrative example of this approach to street sensor selection, whose problem formalization and solution implementation are yielded in the next paragraphs, is depicted in Figure 2. Detailed discussions on experimental results and case analyses related to the topic can be also found in [54].
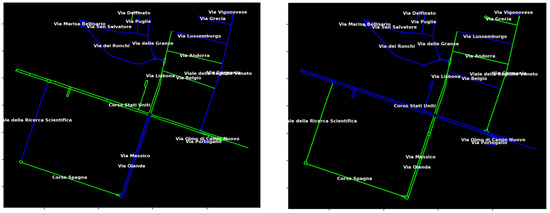
Figure 2.
The segments highlighted in green indicate the best selection according to the metrics (left) and (right) of roads among possible roads in the industrial zone of Padua, Italy. Whereas, blue segments indicate roads that are not selected. More on these simulations at https://thesis.unipd.it/handle/20.500.12608/74384 (accessed on 21 October 2024).
3.3. Formalization of the Problem
In this section, the rigorous mathematical formulation of the street sensor selection problem is provided. We consider an LTI system Σ of the form (4) describing the traffic flow in a given road network. Hereafter, the attention is focused on determining the placement of dedicated sensors, each of them measuring a single output variable, that is, the traffic flow of a single road within an urban network of p roads.
Given the dynamic relation in (4), we can interpret the system matrices C and B as follows: each row of the matrix C represents a sensor of the system, whereas each column of the matrix B represents an actuator of the system. One has
where , represents a sensor, whereas , , represents an actuator.
As we want to select only out of the p sensors available for use at each time instant, we seek a selection matrix
with that will choose which rows of the sensing matrix C will be used, so that the new sensing matrix is . In this review, we consider the sensor selection problem under a restrictive setup in which only the output provided by the selected sensors at the instant is available for measurement. As a minimum requirement, one may impose the following assumption, which implies knowing that at least one set of sensors renders the system observable. In other words, such an assumption guarantees the feasibility of the street sensor selection problem.
Assumption 1.
For some , there exists a known selection , such that is observable.
To describe the road quantities selected by the configuration in a more convenient fashion, we redefine Σ via the following relation:
so that the observability Gramian of associated to the output is given by
To simplify the notation, let us set . It is worth noting that, whenever a configuration is selected satisfying the relation
then the following statements are equivalent:
- The couple is observable;
- The couple is observable.
In other words, the validity of relation (31) implies that the underlying system is observable with respect to both the outputs and . A similar result can be demonstrated with regard to detectability. More precisely, if for a certain configuration , the couple is detectable, then the couple is detectable.
Following this rationale, the street sensor selection problem can be thus rigorously formalized as stated in the next lines.
Problem 1.
Given a fixed number of sensors such that , select a configuration among all the configurations of sensors for which the following conditions are true:
3.4. Basic Algorithmic Solutions
In the following lines, we shall illustrate a couple of elementary algorithmic approaches to solve Problem 1. More formally, given a metric f operating on the observability Gramian of the LTI system (29), we seek an algorithmic solution of
3.4.1. Exhaustive Search Approach
A potential approach to solve the problem of street sensor selection expressed by is to examine all possible combinations of sensors and select the configuration that maximizes one of the metrics among those examined in Section 3.2. To this purpose, Algorithm 1 allows to find a configuration that also represents the global optimum (satisfying the detectability requirement) attained by maximization in (9). Such a property is guaranteed since the value () of a chosen observability-based metric f is evaluated once for each possible configuration (in particular, each configuration , with , is associated to a binary codeword composed of ones and zeros. Notice that the check (line 5 in Algorithm 1) can be actually avoided by properly shifting ones and zeros in , thus yielding a more efficient implementation for this kind of search) containing active sensors and maximized in a brute-force fashion. Consequently, we relabel the solution obtained from the exhaustive search approach as .
Although this procedure guarantees a totally predictable behavior from a mathematical point of view and exactly solves the original problem, it could require a great computational power in the case of large urban networks, scaling exponentially as the number of selected sensors increases [46]. As already mentioned above, this drawback is due to the intrinsic combinatorial complexity related to the evaluation of all possible sensor configurations. For this reason, further strategies requiring a lower computational burden can be employed, such as the random approach (see next subsection). For this kind of strategy, the final result obtained through such approaches is the choice of an appropriate set of sensors for which it is not always guaranteed that ; in fact, heuristic-based optimization procedures may generally find a local minimum whenever the given problem is nonconvex.
| Algorithm 1 Exhaustive-search-based selection algorithm |
|
3.4.2. Random Approach
In this second approach, sensors are randomly selected over p. Algorithm 2 mainly consists of a loop of iterations, where the parameter is chosen. At each iteration, the selection indices are then assigned as the outcome of a uniform distribution, such that these can select sensors with no need to repeat the execution (since exactly random indices are generated at a time). The set of selected sensors , whose values might be repeatedly assigned across the main iterations, is then compared with the best configuration to find the highest . Clearly, it is not ensured that coincides with the optimal solution . And this is not even guaranteed to occur as , since any generation of the indices through the random variable is independent from the previous ones. Another drawback is the fact that no criterion can be used to break the main loop in this algorithm before its execution stops. Nonetheless, such a random approach has the advantage of searching significantly diverse sensor configurations at each step. Hence, Algorithm 2 can be, in principle, combined with any other approach not ensuring optimality (discussed in the sequel) to allow a strategic warm start or boost variables’ space exploration in spite of exploitation.
| Algorithm 2 Random selection algorithm |
|
3.5. State-of-the-Art Solutions to the Street Sensor Selection Problem
Within the framework of street sensor selection for traffic monitoring, the description given in (4) comes in handy to describe, in a simplified fashion and from a macroscopic point of view, an urban network flow of vehicles. Frequently, each component of the state is associated with the number of vehicles per second passing through a certain road connection. The components of input can be intended as the number of incoming vehicles with respect to the frontier nodes of the underlying network. The state and input origin–destination matrices describe the state temporal update in the function of previous values and the input . On the other hand, the entries of C are often binary and indicate the links on which sensors are placed. Usually, D is set to zero while observing the output selected through C. As stated in Problem 1, the matrix C needs to be possibly found by optimizing one of the observability-Gramian-based metrics. The particular choice of the latter key performance indicators is crucial, as also demonstrated by the investigations reported in the next lines.
Problem 1 has firstly been addressed in terms of observability in [55], where the optimal location of sensors is viewed as the problem of maximizing the output energy generated by a given state. In the dissertation [56], the author formalizes the observability-based sensor placement problem by proposing a number of observability metrics to be optimized in order to select the locations of the sensors.
Many variations of this problem have then become popular in the literature, especially those related to the optimal choice of street sensors to be deployed on road networks with the purpose of traffic flow monitoring. Nonetheless, the main challenge arising while tackling Problem 1 lies in its combinatorial nature, which is common across all its variants. Indeed, the study in [57] shows that the problem of selecting a set of sensors of minimum cost used for the synthesis of a supervisory controller is related to a type of directed graph -cut and can be converted into an integer programming problem. On the other hand, ref. [58] addresses the joint sensor selection and observer design problem for positive systems. The proposed methodology leverages Mixed-Integer Semidefinite Programming techniques, providing a rigorous and systematic framework for optimizing the selection of sensors and the design of the corresponding optimal observer in a unified manner.
The research in [59] employs a convex optimization approach to simplify the combinatorial nature of sensor selection, combining convex relaxation with local optimization to efficiently obtain near-optimal solutions. The concept of virtual variance, proposed in [60], then transforms the sensor placement problem into a convex optimization task, reducing computational complexity compared to the original combinatorial formulation. In addition, the researchers in [61] point out the drawbacks of entropy-based sensor placement approaches, which frequently result in suboptimal coverage at the boundaries of the region of interest. To overcome this issue, they utilize Gaussian processes to model sensor measurements and maximize the mutual information between sensors, thereby achieving improved spatial coverage of information.
The authors of [47] address this task by proposing different metrics based on the observability Gramian that can be maximized through a greedy approach exploiting submodularity with respect to some of the aforementioned observability-Gramian-based metrics. This allows for solutions having an optimality gap upper-bounded by , as proven in [62]. Similarly, the work in [63] formulates the problem of camera placement in high-traffic urban areas as a submodular set function optimization problem, solved using a greedy heuristic with provable suboptimality bounds [46]. Other heuristics are instead based on the simulated annealing strategy [64], which solves the problem under a predefined budget constraint on the maximum number of sensors to be used. The results presented in [51,65] are also considered. The first work proposes an end-to-end solution to the street sensor selection problem through road network modeling and observability measures. On the other hand, the second work addresses the problem of fault tolerant estimation and the design of fault tolerant sensor networks, introducing the concepts of redundant and minimal sensor sets and organizing them into an automaton, i.e., a control mechanism designed to automatically follow a sequence of operations. Extensively explored in the literature, further works have proposed various algorithms to maximize norm-related metrics, capitalizing on the assumption that more powerful sensors yield stronger signals [52,53,66,67]. Additionally, sensor selection has been approached from different angles, not only including the optimization of Gramian-related metrics [68,69,70,71], but also linear–quadratic regulation [72,73,74] and security concerns [75,76].
However, many existing methodologies presuppose complete knowledge of the system model, which may be restrictive in some scenarios. Addressing the challenge of unknown system dynamics, adaptive control techniques such as model-free optimal control [77,78,79] and adaptive backstepping [80] have been proposed. Recent advancements in learning algorithms have further facilitated sensors and actuators selection in dynamic environments [81,82,83,84]. Notably, real-time learning-based approaches have emerged to dynamically decide sensor utilization based on evolving system behavior [81]. Yet, limitations persist, particularly in scenarios where only output data are accessible, rendering sensor selection considerably more complex.
Lastly, we report on new trends in sensor selection for systems with unknown characteristics, focusing on input–output data. Despite the inherent challenges, leveraging techniques from reinforcement learning [85], a cost function can be expressed solely based on input–output data. These data-driven approaches enable effective street sensor selection even in scenarios where system matrices are unknown, offering a promising avenue for addressing the constraints of the framework under analysis.
4. Discussion
In this study, the efficient sensor selection for traffic flow monitoring has been addressed. So far, we have provided an overview of the most popular and powerful model-based techniques leveraging the notion of road network observability. Nevertheless, a few limitations should be pointed out with respect to these solutions. Traditionally, traffic modeling relies on the identification of system matrices to capture the underlying dynamics accurately. However, this approach is often hindered by the intricate and nonlinear nature of traffic systems, leading to inaccuracies or inadequacies in model representation. In addition, the full reliance on state-space models is also related to another major drawback: since the number of possible placement configurations increases super-exponentially (by leveraging Stirling’s approximation [86], it can be proven that the quantity grows no faster than , as (the worst case scenario occurs for )) as the numbers of available and deployed sensors grow, then the NP-hardness for brute-force optimal algorithmic solutions, such as Algorithms 1 and 2, is established. Data-driven methodologies, such as reinforcement learning and machine learning techniques, are thus envisaged to circumvent the need for explicitly identifying system matrices. An increasing adoption of data-driven approaches grounded in the observability of networked systems is foreseen for sensor selection in traffic modeling. This shift represents a significant advancement in addressing the complexities inherent in traffic flow dynamics and, ultimately, in establishing innovative and explainable methods for devising efficient ITSs. Indeed, besides assigning a set of sensors for traffic flow monitoring, such data-driven methods also allow real-time scheduling in uncertain scenarios (see, e.g., [87]) for the already deployed WSN and the employment of additional mobile sensors. In online sensor scheduling, the selection of sensors is indeed made dynamically over time, as opposed to being predetermined in advance. At each time step, the sensor set is evaluated based on the current state of the system, and a decision is made about which sensors to keep or discard. As highlighted in [81], the key characteristic of online sensor scheduling is its causality, meaning the decisions made at each time step are based only on the state knowledge up to the current time, without knowing the future. This makes the problem challenging because the scheduling decisions must account for the uncertainty and changing dynamics of the system without complete future information. In fact, the objective of online sensor scheduling is to minimize the use of sensors while maintaining the observability of the system, as close as possible to the fully-sensed dynamics.
The adoption of data-driven sensor selection methodologies rooted in network observability would not only enhance the efficacy of sensor deployment and mesoscale or microscale traffic modeling but also catalyze advancements in communication technologies, thus fostering the IoV paradigm. In order to facilitate the transmission of large datasets required for rescheduling, improvements in communication infrastructure are imperative. This includes the development of high-speed, reliable communication networks capable of handling the influx of data from distributed sensors in real time based on 5G, 6G, and MEC technologies. Moreover, given the critical importance of energy efficiency in IoT-oriented WSNs, additional efforts to minimize energy consumption during data transmission are paramount. This involves the redesign and implementation of energy-efficient communication protocols and algorithms to optimize data transmission while conserving energy resources.
We believe that the interdisciplinary nature of data-driven sensor selection approaches resonates with stakeholders across transportation, IoT, and control systems domains. By addressing the challenges of traffic modeling and monitoring along with sensor selection and scheduling through innovative data-driven techniques (such as data-driven predictive control [88,89,90,91,92]), these novel methodologies are envisaged for reaching more efficient and adaptive ITSs, with broader implications for urban planning, traffic management, and infrastructure development.
5. Concluding Remarks and Future Directions
This paper reviews the main model-based techniques leveraging network observability to perform efficient sensor selection for traffic flow monitoring. It is highlighted how modeling and monitoring urban networks constitute an interdependent challenging task. To this aim, advantages and current limitations with respect to the state-of-the-art approaches are discussed, promoting the use of data-driven sensor selection strategies inspired by network observability together with the advancement of cutting-edge 6G communication technologies towards the Interned-of-Vehicles paradigm. Tackling the difficulties associated with traffic modeling, monitoring, sensor selection, and scheduling through cutting-edge data-driven methodologies holds the potential to realize more efficient and adaptive intelligent transportation systems. These innovative approaches carry wide-ranging implications for urban planning, traffic management strategies, and the development of transportation infrastructure.
Future work linked to these topics will consider the investigation of new observability-based metrics for time-varying or nonlinear systems, as well as the research devoted to the comparison of the existing metrics, and the innovation of data-driven strategies to overcome stringent assumptions related to the adoption of rigid model structures.
Author Contributions
Conceptualization, formal analysis, investigation, M.F.; methodology, software, resources, visualization, writing—original draft preparation, writing—review and editing, M.F. and R.C.; project administration, M.F. and A.Z.; supervision and funding acquisition, A.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This study was carried out within the MOST (the Italian National Center for Sustainable Mobility) and received funding from NextGenerationEU (Italian PNRR—CN00000023—D.D. 1033 17/06/2022—CUP C93C22002750006).
Acknowledgments
The authors would like to express their gratitude to Aynur Şen for her valuable assistance with coding and producing the images presented in Figure 2.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| 5G | Fifth generation (of wireless cellular technology) |
| 6G | Sixth generation (of wireless cellular technology) |
| AI | Artificial intelligence |
| IoT | Internet of Things |
| IoV | Internet of Vehicles |
| ITS | Intelligent transportation system |
| LTI | Linear time-invariant |
| MEC | Mobile Edge Computing |
| V2X | Vehicle to everything |
| WSN | Wireless sensor network |
References
- Alcaraz-Calero, J.; Belikaidis, I.P.; Cano, C.J.B.; Bisson, P.; Bourse, D.; Bredel, M.; Camps-Mur, D.; Chen, T.; Costa-Perez, X.; Demestichas, P.; et al. Leading innovations towards 5G: Europe’s perspective in 5G infrastructure public-private partnership (5G-PPP). In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Chiariotti, F.; Condoluci, M.; Mahmoodi, T.; Zanella, A. SymbioCity: Smart cities for smarter networks. Trans. Emerg. Telecommun. Technol. 2018, 29, e3206. [Google Scholar] [CrossRef]
- EU. 5G Vision—The 5G Infrastructure Public Private Partnership: The Next Generation of Communication Networks and Services, 2015. The 5G Infrastructure Association. Available online: https://5g-ppp.eu/wp-content/uploads/2015/02/5G-Vision-Brochure-v1.pdf (accessed on 1 March 2015).
- Patel, M.; Naughton, B.; Chan, C.; Sreccher, N.; Abeta, S.; Neal, A. Mobile-Edge Computing: Introductory Technical White Paper; ETSI: Sophia Antipolis, France, 2014; pp. 1–36. [Google Scholar]
- Sabella, D.; Vaillant, A.; Kuure, P.; Rauschenbach, U.; Giust, F. Mobile-edge computing architecture: The role of MEC in the Internet of Things. IEEE Consum. Electron. Mag. 2016, 5, 84–91. [Google Scholar] [CrossRef]
- Osorio, D.P.M.; Ahmad, I.; Sánchez, J.D.V.; Gurtov, A.; Scholliers, J.; Kutila, M.; Porambage, P. Towards 6G-enabled internet of vehicles: Security and privacy. IEEE Open J. Commun. Soc. 2022, 3, 82–105. [Google Scholar] [CrossRef]
- Giordani, M.; Polese, M.; Mezzavilla, M.; Rangan, S.; Zorzi, M. Toward 6G networks: Use cases and technologies. IEEE Commun. Mag. 2020, 58, 55–61. [Google Scholar] [CrossRef]
- Tubaishat, M.; Zhuang, P.; Qi, Q.; Shang, Y. Wireless sensor networks in intelligent transportation systems. Wirel. Commun. Mob. Comput. 2009, 9, 287–302. [Google Scholar] [CrossRef]
- Musa, A.A.; Malami, S.I.; Alanazi, F.; Ounaies, W.; Alshammari, M.; Haruna, S.I. Sustainable Traffic Management for Smart Cities Using Internet-of-Things-Oriented Intelligent Transportation Systems (ITS): Challenges and Recommendations. Sustainability 2023, 15, 9859. [Google Scholar] [CrossRef]
- Chhatpar, P.; Doolani, N.; Shahani, S.; Priya, R. Machine learning solutions to vehicular traffic congestion. In Proceedings of the 2018 International Conference on Smart City and Emerging Technology (ICSCET), Mumbai, India, 5 January 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–4. [Google Scholar]
- Owais, M. Deep Learning for Integrated Origin–Destination Estimation and Traffic Sensor Location Problems. IEEE Trans. Intell. Transp. Syst. 2024, 25, 6501–6513. [Google Scholar] [CrossRef]
- Cheng, Z.; Wang, W.; Lu, J.; Xing, X. Classifying the traffic state of urban expressways: A machine-learning approach. Transp. Res. Part A Policy Pract. 2020, 137, 411–428. [Google Scholar] [CrossRef]
- Viti, F.; Verbeke, W.; Tampère, C.M. Sensor locations for reliable travel time prediction and dynamic management of traffic networks. Transp. Res. Rec. 2008, 2049, 103–110. [Google Scholar] [CrossRef]
- Bae, B.; Liu, Y.; Han, L.D.; Bozdogan, H. Spatio-temporal traffic queue detection for uninterrupted flows. Transp. Res. Part B Methodol. 2019, 129, 20–34. [Google Scholar] [CrossRef]
- Ben-Akiva, M.; Bierlaire, M.; Burton, D.; Koutsopoulos, H.N.; Mishalani, R. Network state estimation and prediction for real-time traffic management. Netw. Spat. Econ. 2001, 1, 293–318. [Google Scholar] [CrossRef]
- Häfner, B.; Bajpai, V.; Ott, J.; Schmitt, G.A. A survey on cooperative architectures and maneuvers for connected and automated vehicles. IEEE Commun. Surv. Tutor. 2021, 24, 380–403. [Google Scholar] [CrossRef]
- Ding, J.; Li, L.; Peng, H.; Zhang, Y. A rule-based cooperative merging strategy for connected and automated vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3436–3446. [Google Scholar] [CrossRef]
- Chen, J.; Liang, H.; Li, J.; Xu, Z. A novel distributed cooperative approach for mixed platoon consisting of connected and automated vehicles and human-driven vehicles. Phys. A Stat. Mech. Its Appl. 2021, 573, 125939. [Google Scholar] [CrossRef]
- Owais, M. Traffic sensor location problem: Three decades of research. Expert Syst. Appl. 2022, 208, 118134. [Google Scholar] [CrossRef]
- Won, M. Intelligent traffic monitoring systems for vehicle classification: A survey. IEEE Access 2020, 8, 73340–73358. [Google Scholar] [CrossRef]
- Ramírez-Moreno, M.A.; Keshtkar, S.; Padilla-Reyes, D.A.; Ramos-López, E.; García-Martínez, M.; Hernández-Luna, M.C.; Mogro, A.E.; Mahlknecht, J.; Huertas, J.I.; Peimbert-García, R.E.; et al. Sensors for sustainable smart cities: A review. Appl. Sci. 2021, 11, 8198. [Google Scholar] [CrossRef]
- de Dios Ortúzar, J.; Willumsen, L.G. Modelling Transport; John Wiley & Sons: Hoboken, NJ, USA, 2024. [Google Scholar]
- Barceló, J. Fundamentals of Traffic Simulation; Springer: New York, NY, USA, 2010; Volume 145. [Google Scholar]
- Cascetta, E. Transportation Systems Analysis: Models and Applications; Springer Science & Business Media: New York, NY, USA, 2009; Volume 29. [Google Scholar]
- Barceló, J.; Casas, J.; García, D.; Perarnau, J. Methodological notes on combining macro, meso and micro models for transportation analysis. In Proceedings of the Workshop on Modeling and Simulation, Atlanta, GA, USA, 22–25 May 2005; pp. 1–40. [Google Scholar]
- Systra. Paramics Discovery v. 26.0.2; Systra: Paris, France, 2025. [Google Scholar]
- Bentle Systems. CUBE VOYAGER Reference Guide (v6.5.0); Bentle Systems: Exton, PA, USA, 2020. [Google Scholar]
- Wang, N.; Gentili, M.; Mirchandani, P. Model to locate sensors for estimation of static origin–destination volumes given prior flow information. Transp. Res. Rec. 2012, 2283, 67–73. [Google Scholar] [CrossRef]
- Fei, X.; Mahmassani, H.S.; Murray-Tuite, P. Vehicular network sensor placement optimization under uncertainty. Transp. Res. Part C Emerg. Technol. 2013, 29, 14–31. [Google Scholar] [CrossRef]
- Ehlert, A.; Bell, M.G.; Grosso, S. The optimisation of traffic count locations in road networks. Transp. Res. Part B Methodol. 2006, 40, 460–479. [Google Scholar] [CrossRef]
- Owais, M.; Moussa, G.S.; Hussain, K.F. Sensor location model for O/D estimation: Multi-criteria meta-heuristics approach. Oper. Res. Perspect. 2019, 6, 100100. [Google Scholar] [CrossRef]
- Hu, S.R.; Peeta, S.; Chu, C.H. Identification of vehicle sensor locations for link-based network traffic applications. Transp. Res. Part B Methodol. 2009, 43, 873–894. [Google Scholar] [CrossRef]
- Castillo, E.; Jimenez, P.; Menendez, J.M.; Conejo, A.J. The observability problem in traffic models: Algebraic and topological methods. IEEE Trans. Intell. Transp. Syst. 2008, 9, 275–287. [Google Scholar] [CrossRef]
- Cipriani, E.; Fusco, G.; Gori, S.; Petrelli, M. Heuristic methods for the optimal location of road traffic monitoring. In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1072–1077. [Google Scholar]
- Sun, W.; Shao, H.; Shen, L.; Wu, T.; Lam, W.H.; Yao, B.; Yu, B. Bi-objective traffic count location model for mean and covariance of origin–destination estimation. Expert Syst. Appl. 2021, 170, 114554. [Google Scholar] [CrossRef]
- Hu, S.R.; Liou, H.T. A generalized sensor location model for the estimation of network origin–destination matrices. Transp. Res. Part C Emerg. Technol. 2014, 40, 93–110. [Google Scholar] [CrossRef]
- Gentili, M.; Mirchandani, P.B. Survey of models to locate sensors to estimate traffic flows. Transp. Res. Rec. 2011, 2243, 108–116. [Google Scholar] [CrossRef]
- Park, H.; Haghani, A. Optimal number and location of Bluetooth sensors considering stochastic travel time prediction. Transp. Res. Part C Emerg. Technol. 2015, 55, 203–216. [Google Scholar] [CrossRef]
- Cao, Q.; Yuan, J.; Ren, G.; Qi, Y.; Li, D.; Deng, Y.; Ma, W. Tracking the source of congestion based on a probabilistic sensor flow assignment model. Transp. Res. Part C Emerg. Technol. 2024, 165, 104736. [Google Scholar] [CrossRef]
- Fu, C.; Zhu, N.; Ling, S.; Ma, S.; Huang, Y. Heterogeneous sensor location model for path reconstruction. Transp. Res. Part B Methodol. 2016, 91, 77–97. [Google Scholar] [CrossRef]
- Cruz-Piris, L.; Rivera, D.; Fernandez, S.; Marsa-Maestre, I. Optimized sensor network and multi-agent decision support for smart traffic light management. Sensors 2018, 18, 435. [Google Scholar] [CrossRef]
- Varotto, L.; Fabris, M.; Michieletto, G.; Cenedese, A. Visual sensor network stimulation model identification via Gaussian mixture model and deep embedded features. Eng. Appl. Artif. Intell. 2022, 114, 105096. [Google Scholar] [CrossRef]
- Fei, X.; Mahmassani, H.S. Structural analysis of near-optimal sensor locations for a stochastic large-scale network. Transp. Res. Part C Emerg. Technol. 2011, 19, 440–453. [Google Scholar] [CrossRef]
- Hespanha, J.P. Linear Systems Theory; Princeton University Press: Princeton, NJ, USA, 2018. [Google Scholar]
- Oppenheim, A.V.; Verghese, G.C. Signals, Systems & Inference; Pearson: London, UK, 2017. [Google Scholar]
- Olshevsky, A. Minimal Controllability Problems. IEEE Trans. Control Netw. Syst. 2014, 1, 249–258. [Google Scholar] [CrossRef]
- Summers, T.H.; Cortesi, F.L.; Lygeros, J. On submodularity and controllability in complex dynamical networks. IEEE Trans. Control Netw. Syst. 2015, 3, 91–101. [Google Scholar] [CrossRef]
- Feige, U.; Mirrokni, V.S.; Vondrák, J. Maximizing non-monotone submodular functions. SIAM J. Comput. 2011, 40, 1133–1153. [Google Scholar] [CrossRef]
- Luenberger, D.G. Observing the state of a linear system. IEEE Trans. Mil. Electron. 1964, 8, 74–80. [Google Scholar] [CrossRef]
- Baggio, G.; Pasqualetti, F.; Zampieri, S. Energy-aware controllability of complex networks. Annu. Rev. Control Robot. Auton. Syst. 2022, 5, 465–489. [Google Scholar] [CrossRef]
- Varotto, L.; Zampieri, A.; Cenedese, A. Street sensors set selection through road network modeling and observability measures. In Proceedings of the 2019 27th Mediterranean Conference on Control and Automation (MED), Akko, Israel, 1–4 July 2019; IEEE: Princeton, NJ, USA, 2019; pp. 392–397. [Google Scholar]
- Summers, T.H.; Lygeros, J. Optimal sensor and actuator placement in complex dynamical networks. IFAC Proc. Vol. 2014, 47, 3784–3789. [Google Scholar] [CrossRef]
- Manohar, K.; Kutz, J.N.; Brunton, S.L. Optimal Sensor and Actuator Selection Using Balanced Model Reduction. IEEE Trans. Autom. Control 2022, 67, 2108–2115. [Google Scholar] [CrossRef]
- Varotto, L. Probabilistic Active Sensing in Multi-Sensor Applications. Ph.D. Thesis, University of Padova, Padova, Italy, 2021. [Google Scholar]
- Georges, D. The use of observability and controllability gramians or functions for optimal sensor and actuator location in finite-dimensional systems. In Proceedings of the 1995 34th IEEE Conference on Decision and Control, New Orleans, LA, USA, 13–15 December 1995; IEEE: Princeton, NJ, USA, 1995; Volume 4, pp. 3319–3324. [Google Scholar]
- Hinson, B.T. Observability-Based Guidance and Sensor Placement. Ph.D. Thesis, University of Washington, Seattle, WA, USA, 2014. [Google Scholar]
- Rohloff, K.R.; Khuller, S.; Kortsarz, G. Approximating the minimal sensor selection for supervisory control. Discret. Event Dyn. Syst. 2006, 16, 143–170. [Google Scholar] [CrossRef]
- Gagliardi, G.; Torchiaro, F.A.; Casavola, A. Joint Sensor Selection and Observer Design for Positive Systems via Mixed-Integer Semidefinite Programming. IEEE Control Syst. Lett. 2024, 8, 700–705. [Google Scholar] [CrossRef]
- Joshi, S.; Boyd, S. Sensor selection via convex optimization. IEEE Trans. Signal Process. 2008, 57, 451–462. [Google Scholar] [CrossRef]
- Lovisari, E.; de Wit, C.C.; Kibangou, A.Y. Optimal Sensor Placement in Road Transportation Networks using virtual variances. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015; pp. 2786–2791. [Google Scholar]
- Guestrin, C.; Krause, A.; Singh, A.P. Near-optimal sensor placements in Gaussian processes. In Proceedings of the ICML’05: 22nd International Conference on Machine Learning, Bonn, Germany, 7–11 August 2005; pp. 265–272. [Google Scholar]
- Li, R.; Mehr, N.; Horowitz, R. Submodularity of optimal sensor placement for traffic networks. Transp. Res. Part B Methodol. 2023, 171, 29–43. [Google Scholar] [CrossRef]
- Ma, X.; He, Y.; Luo, X.; Li, J.; Zhao, M.; An, B.; Guan, X. Camera Placement Based on Vehicle Traffic for Better City Security Surveillance. IEEE Intell. Syst. 2018, 33, 49–61. [Google Scholar] [CrossRef]
- Gagliardi, G.; Casavola, A.; D’Angelo, V. Traffic Sensors Selection for Complete Link Flow Observability through Simulated Annealing. IFAC-PapersOnLine 2023, 56, 10540–10545. [Google Scholar] [CrossRef]
- Staroswiecki, M.; Hoblos, G.; Aitouche, A. Sensor network design for fault tolerant estimation. Int. J. Adapt. Control Signal Process. 2004, 18, 55–72. [Google Scholar] [CrossRef]
- Clark, E.; Kutz, J.N.; Brunton, S.L. Sensor selection with cost constraints for dynamically relevant bases. IEEE Sens. J. 2020, 20, 11674–11687. [Google Scholar] [CrossRef]
- Chen, K.K.; Rowley, C.W. H2 optimal actuator and sensor placement in the linearised complex Ginzburg–Landau system. J. Fluid Mech. 2011, 681, 241–260. [Google Scholar] [CrossRef]
- Summers, T.; Shames, I. Convex relaxations and gramian rank constraints for sensor and actuator selection in networks. In Proceedings of the 2016 IEEE International Symposium on Intelligent Control (ISIC), Buenos Aires, Argentina, 19–22 September 2016; IEEE: Princeton, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Yamada, K.; Sasaki, Y.; Nagata, T.; Nakai, K.; Tsubakino, D.; Nonomura, T. Efficient sensor node selection for observability Gramian optimization. Sensors 2023, 23, 5961. [Google Scholar] [CrossRef]
- Bopardikar, S.D. Sensor selection via randomized sampling. arXiv 2017, arXiv:1712.06511. [Google Scholar]
- Siami, M.; Olshevsky, A.; Jadbabaie, A. Deterministic and randomized actuator scheduling with guaranteed performance bounds. IEEE Trans. Autom. Control 2020, 66, 1686–1701. [Google Scholar] [CrossRef]
- Dhingra, N.K.; Jovanović, M.R.; Luo, Z.Q. An ADMM algorithm for optimal sensor and actuator selection. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; IEEE: Princeton, NJ, USA, 2014; pp. 4039–4044. [Google Scholar]
- Zare, A.; Mohammadi, H.; Dhingra, N.K.; Georgiou, T.T.; Jovanović, M.R. Proximal algorithms for large-scale statistical modeling and sensor/actuator selection. IEEE Trans. Autom. Control 2019, 65, 3441–3456. [Google Scholar] [CrossRef]
- Tzoumas, V.; Carlone, L.; Pappas, G.J.; Jadbabaie, A. LQG control and sensing co-design. IEEE Trans. Autom. Control 2020, 66, 1468–1483. [Google Scholar] [CrossRef]
- Milošević, J.; Teixeira, A.; Johansson, K.H.; Sandberg, H. Actuator security indices based on perfect undetectability: Computation, robustness, and sensor placement. IEEE Trans. Autom. Control 2020, 65, 3816–3831. [Google Scholar] [CrossRef]
- Pirani, M.; Nekouei, E.; Sandberg, H.; Johansson, K.H. A game-theoretic framework for security-aware sensor placement problem in networked control systems. IEEE Trans. Autom. Control 2021, 67, 3699–3706. [Google Scholar] [CrossRef]
- Kiumarsi, B.; Vamvoudakis, K.G.; Modares, H.; Lewis, F.L. Optimal and autonomous control using reinforcement learning: A survey. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 2042–2062. [Google Scholar] [CrossRef]
- Jiang, Y.; Jiang, Z.P. Robust adaptive dynamic programming and feedback stabilization of nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 882–893. [Google Scholar] [CrossRef]
- Modares, H.; Lewis, F.L. Optimal tracking control of nonlinear partially-unknown constrained-input systems using integral reinforcement learning. Automatica 2014, 50, 1780–1792. [Google Scholar] [CrossRef]
- Krstic, M.; Kokotovic, P.V.; Kanellakopoulos, I. Nonlinear and Adaptive Control Design; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1995. [Google Scholar]
- Vafaee, R.; Siami, M. Real-time sensor selection for time-varying networks with guaranteed performance. Automatica 2024, 163, 111550. [Google Scholar] [CrossRef]
- Ye, L.; Chi, M.; Liu, Z.W.; Gupta, V. Online Actuator Selection and Controller Design for Linear Quadratic Regulation with Unknown System Model. arXiv 2022, arXiv:2201.10197. [Google Scholar] [CrossRef]
- Fotiadis, F.; Vamvoudakis, K.G.; Jiang, Z.P. Data-Driven Actuator Allocation for Actuator Redundant Systems. IEEE Trans. Autom. Control 2023, 69, 2249–2264. [Google Scholar] [CrossRef]
- Fotiadis, F.; Vamvoudakis, K.G. Learning-based actuator selection for increased attack resilience of uncertain systems. Automatica 2024, 159, 111332. [Google Scholar] [CrossRef]
- Lewis, F.L.; Vamvoudakis, K.G. Reinforcement learning for partially observable dynamic processes: Adaptive dynamic programming using measured output data. IEEE Trans. Syst. Man, Cybern. Part B (Cybern.) 2010, 41, 14–25. [Google Scholar] [CrossRef] [PubMed]
- Robbins, H. A remark on Stirling’s formula. Am. Math. Mon. 1955, 62, 26–29. [Google Scholar] [CrossRef]
- Gupta, V.; Chung, T.H.; Hassibi, B.; Murray, R.M. On a stochastic sensor selection algorithm with applications in sensor scheduling and sensor coverage. Automatica 2006, 42, 251–260. [Google Scholar] [CrossRef]
- Piga, D.; Formentin, S.; Bemporad, A. Direct data-driven control of constrained systems. IEEE Trans. Control Syst. Technol. 2017, 26, 1422–1429. [Google Scholar] [CrossRef]
- Dörfler, F.; Coulson, J.; Markovsky, I. Bridging direct and indirect data-driven control formulations via regularizations and relaxations. IEEE Trans. Autom. Control 2022, 68, 883–897. [Google Scholar] [CrossRef]
- Breschi, V.; Fabris, M.; Formentin, S.; Chiuso, A. Uncertainty-aware data-driven predictive control in a stochastic setting. IFAC-PapersOnLine 2023, 56, 10083–10088. [Google Scholar] [CrossRef]
- Breschi, V.; Chiuso, A.; Fabris, M.; Formentin, S. On the Impact of Regularization in Data-Driven Predictive Control. In Proceedings of the 2023 62nd IEEE Conference on Decision and Control (CDC), Singapore, 13–15 December 2023; pp. 3061–3066. [Google Scholar]
- Chiuso, A.; Fabris, M.; Breschi, V.; Formentin, S. Harnessing uncertainty for a separation principle in direct data-driven predictive control. Automatica 2025, 173, 112070. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).