
Time to First Fix Robustness of Global Navigation Satellite Systems: Comparison Study

 , , and
, , and
Abstract
1. Introduction
- Faster response times: Rapid location acquisition enables quicker reactions in search and rescue operations and emergency services [18].
2. Materials and Methods
- GNSS antenna: A full-spectrum choked-ring antenna, Leica AR20 with a dome, is employed to capture the signals of all GNSSs. The antenna is installed on the roof of a building at the campus of the Spanish National Institute for Aerospace Technology (INTA) located in Torrejón de Ardoz.
- GNSS recorder and playback system: Live GNSS signals are recorded and later reproduced to carry out all the test runs with a Spirent (Spirent Communications plc, Crawley, UK) GSS6450 multi-frequency record and playback system [26]. The radio-frequency spectrum that is acquired includes the main band of each GNSS, which are always available in any low-cost receiver:
- -
- BeiDou B1: 1561.098 MHz;
- -
- GPS L1 and Galileo E1: 1575.42 MHz;
- -
- GLONASS G1: 1602.018 MHz.
The configuration applied in the Spirent GSS6450 for recording is as follows:- -
- Central frequency: 1583.604 MHz;
- -
- Bandwidth: 50 MHz;
- -
- Sample resolution: 8 bits.
- RF attenuator: This playback system also includes an output attenuation function that allows us to simulate hypothetical degradations of the power of the signals due to external factors.
- GNSS receiver: It must allow the automation of all the test runs by the remote configuration and management of the following:
- -
- Cold-start execution;
- -
- Configuration of the GNSS (BeiDou, Galileo, GLONASS, or GPS) to be used;
- -
- Access to National Marine Electronics Association (NMEA) 0183 messages [27].
For this aim, a representative low-cost receiver, specifically a u-blox (u-blox AG, Thalwil, Switzerland) ZED-F9P with firmware version 1.32 [28], is used [29,30,31]. This receiver tracks and acquires signals of operational satellites of all generations simultaneously. For the test, its navigation mode is configured with the stationary dynamic platform model and the automatic position fixing mode. Moreover, in order to detect as many satellites as possible, no minimum values for the elevation angle and the signal-to-noise ratio (SNR) are set in its navigation input filters. On the other hand, its navigation output filters, which control the quality of the PVT, are kept with their default values: 25 for maximum dilution of precision (DOP) and 100 m for minimum positioning accuracy.
- Selection of the recording and the attenuation level;
- Execution of a cold start in the receiver and playback of the signal;
- Acquisition of the GSV and GGA NMEA sentences until the first fix.
3. Results
3.1. Tracked Satellites
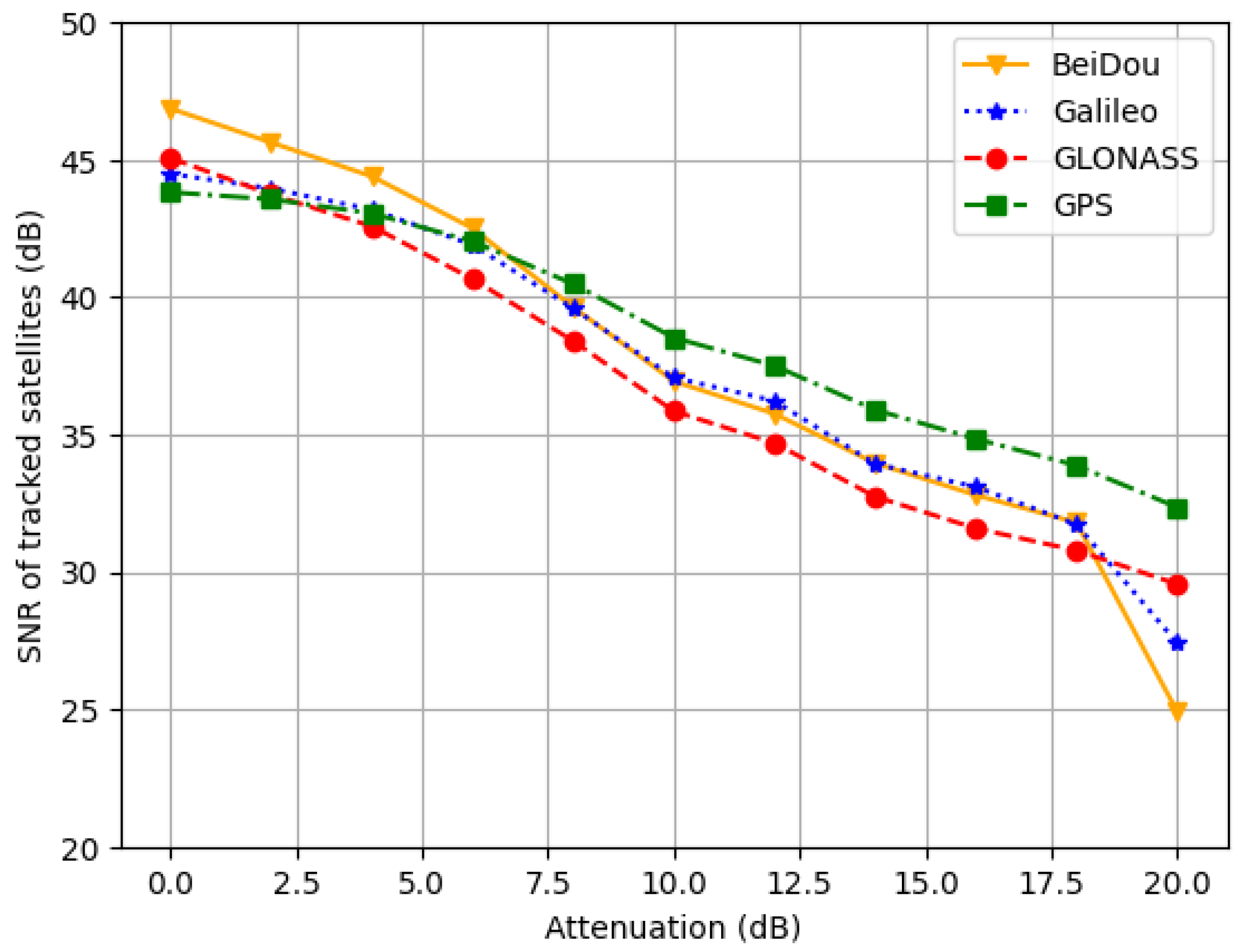
3.2. Signal Power
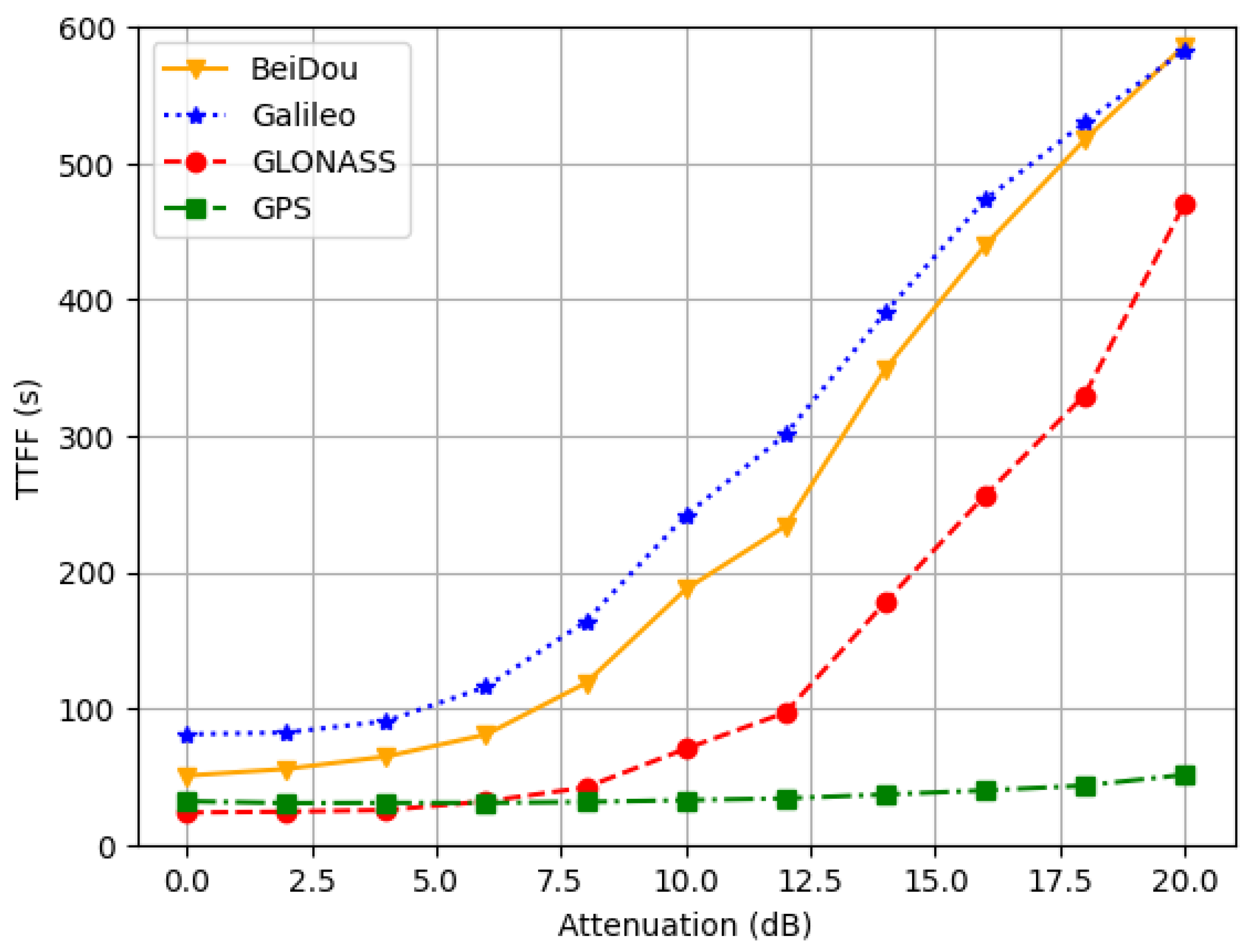
3.3. Time to First Fix
3.4. Positioning Error
4. Discussion
4.1. BeiDou
- The number of tracked satellites provided by BeiDou under optimal conditions, which is similar to that of GLONASS, decreases rapidly with attenuation. In this sense, a relevant factor is the reduced visibility, in terms of both time and elevation angle, of the IGSO satellites from the test location.
- BeiDou is the GNSS that provides the highest signal power in optimal conditions, although it is overcome by GPS and equalized by Galileo when attenuation reaches 8 dB. The same reason commented in the previous point could also be the origin of this behaviour.
- The TTFF results of BeiDou are acceptable with no attenuation, but they deteriorate when any attenuation is applied, especially for values above 8 dB. Therefore, there seems to be some correlation between this degradation of the TTFF and the already shown decrease in the SNR with attenuation. On the other hand, its horizontal error is not significantly affected by attenuation until about 14 dB.
4.2. Galileo
- Galileo is the GNSS that exhibits the lowest number of tracked satellites by far, mainly due to the fact it has not yet reached its full operational capability and therefore the number of operational satellites in orbit is lower compared to the other GNSSs.
- The signal power offered by Galileo in optimal conditions is lower than the one provided by BeiDou, similar to that of GLONASS and higher than that of the GPS one. As long as attenuation increases, its SNR values outperform those of GLONASS and equalize with BeiDou, but are surpassed by the signal power of GPS.
- The TTFF outcome of Galileo is the worst of all GNSSs, affected by the low availability of satellites. In this sense, Galileo implemented in August 2023 an improvement in its navigation message (I/NAV) that reduces the TTFF [35], but it is common that low-cost receivers are not updated with this new capability yet. However, regarding positioning accuracy, in those cases where a fix is achieved, the horizontal error obtaine is solid, providing values that are more precise than those of BeiDou, but larger than the GPS ones.
4.3. GLONASS
- The number of tracked satellites of GLONASS is similar to that provided by BeiDou and only behind the performance of GPS. Moreover, the quantity of tracked satellites is less affected by attenuation compared to BeiDou and Galileo.
- GLONASS is the second best GNSS in terms of SNR under optimal conditions, being overcome only by BeiDou. However, its signal power is the one most affected by attenuation compared to the other three GNSSs.
- GLONASS provides the lowest TTFF of all GNSSs until 4 dB of attenuation, but above that level, only GPS achieves better results. However, this fast TTFF is obtained at the expense of a high horizontal error, which also degrades remarkably when attenuation is applied.
4.4. GPS
- GPS provides the largest quantity of tracked satellites of all GNSSs, even though it is not the GNSS with the most operational satellites in orbit. Therefore, although BeiDou provides a similar number of signals (despite those from its IGSO satellites arriving with lower power), the receiver acquires more from GPS satellites. The reason for this could be a higher robustness of GPS signals or a better adaptation of the receiver to them due to GPS legacy.
- The average signal power of GPS is the smallest under optimal conditions, but this is due to the fact that a higher number of satellites are tracked, even those with low SNR values. In fact, when attenuation increases, its signal power resists better than those of the other GNSSs, surpassing the values of GLONASS and Galileo at 4 dB, and those of BeiDou at 8 dB.
- GPS presents the lowest TTFF results for attenuation levels above 6 dB. In addition, GPS provides the most accurate horizontal position for all attenuation values.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Teunissen, P.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems, 1st ed.; Springer International Publishing AG: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- European Union Agency for the Space Programme. EUSPA EO and GNSS Market Report, 2nd ed.; Publications Office of the European Union: Luxembourg, 2024. [CrossRef]
- Lassiter, E. Navstar Global Positioning System: A Satellite Based Microwave Navigation System. In Proceedings of the 1975 IEEE-MTT-S International Microwave Symposium, Palo Alto, CA, USA, 12–14 May 1975; p. 334. [Google Scholar] [CrossRef]
- Dale, S.A.; Daly, P. The Soviet Union’s GLONASS Navigation Satellites. IEEE Aerosp. Electron. Syst. Mag. 1987, 2, 13–17. [Google Scholar] [CrossRef]
- He, L.; Ge, M.; Wang, J.; Wickert, J.; Schuh, H. Experimental Study on the Precise Orbit Determination of the BeiDou Navigation Satellite System. Sensors 2013, 13, 2911–2928. [Google Scholar] [CrossRef]
- Mozo-García, Á.; Herráiz-Monseco, E.; Martín-Peiró, A.B.; Romay-Merino, M.M. Galileo constellation design. GPS Solut. 2001, 4, 9–15. [Google Scholar] [CrossRef]
- Chen, B.; Gao, C.; Liu, Y.; Sun, P. Real-time Precise Point Positioning with a Xiaomi MI 8 Android Smartphone. Sensors 2019, 19, 2835. [Google Scholar] [CrossRef] [PubMed]
- Pan, L.; Zhang, X.; Li, X.; Li, X.; Lu, C.; Liu, J.; Wang, Q. Satellite availability and point positioning accuracy evaluation on a global scale for integration of GPS, GLONASS, BeiDou and Galileo. Adv. Space Res. 2019, 63, 2696–2710. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Comparing the ‘Big 4’—A User’s View on GNSS Performance. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, ON, USA, 20–23 April 2020; pp. 407–418. [Google Scholar] [CrossRef]
- Dabove, P.; Manzino, A.M. GPS & GLONASS Mass-Market Receivers: Positioning Performances and Peculiarities. Sensors 2014, 14, 22159–22179. [Google Scholar] [CrossRef] [PubMed]
- Lehtinen, M.; Happonen, A.; Ikonen, J. Accuracy and time to first fix using consumer-grade GPS receivers. In Proceedings of the 2008 16th International Conference on Software, Telecommunications and Computer Networks, Split, Croatia, 25–27 September 2008; pp. 334–340. [Google Scholar] [CrossRef]
- Anghileri, M.; Paonni, M.; Gkougkas, E.; Eissfeller, B. Reduced navigation data for a fast first fix. In Proceedings of the 2012 6th ESA Workshop on Satellite Navigation Technologies (Navitec 2012) & European Workshop on GNSS Signals and Signal Processing, Noordwijk, The Netherlands, 5–7 December 2012; pp. 1–7. [Google Scholar] [CrossRef]
- Zuliani, D.; Tunini, L.; Severin, M.; Bertoni, M.; Ponton, C.; Parolai, S. LZER0: A Cost-Effective Multi-Purpose GNSS Platform. Sensors 2022, 22, 8314. [Google Scholar] [CrossRef]
- Erhardt, S.; Koch, M.; Kiefer, A.; Veith, M.; Weigel, R.; Koelpin, A. Mobile-BAT—A Novel Ultra-Low Power Wildlife Tracking System. Sensors 2023, 23, 5236. [Google Scholar] [CrossRef]
- Kazimierski, L.D.; Oliva Trevisan, A.; Kubisch, E.; Laneri, K.; Catalano, N. Design and Development of a Family of Integrated Devices to Monitor Animal Movement in the Wild. Sensors 2023, 23, 3684. [Google Scholar] [CrossRef]
- Jing, C.; Wang, S.; Wang, M.; Du, M.; Zhou, L.; Sun, T.; Wang, J. A Low-Cost Collaborative Location Scheme with GNSS and RFID for the Internet of Things. ISPRS Int. J. Geo-Inf. 2018, 7, 180. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Olivares-Pulido, G.; Graffigna, V.; García-Rigo, A.; Lyu, H.; Roma-Dollase, D.; de Lacy, M.C.; Fernández-Prades, C.; Arribas, J.; Majoral, M.; et al. Wide-Area GNSS Corrections for Precise Positioning and Navigation in Agriculture. Remote Sens. 2022, 14, 3845. [Google Scholar] [CrossRef]
- Martínez-Heredia, J.M.; Olivera, J.; Colodro, F.; Bravo, M.; Arahal, M.R. A Long-Range and Low-Cost Emergency Radio Beacon for Small Drones. Drones 2024, 8, 785. [Google Scholar] [CrossRef]
- Chistyakov, V.; Mikhailov, N.; Pospelov, S.; Vasil’ev, M.; Vasil’eva, N. Method of fast first fix for low cost GNSS receivers. Gyroscopy Navig. 2011, 2, 63–68. [Google Scholar] [CrossRef]
- Steigenberger, P.; Thoelert, S.; Montenbruck, O. GNSS satellite transmit power and its impact on orbit determination. J. Geodesy 2018, 92, 609–624. [Google Scholar] [CrossRef]
- Anghileri, M.; Paonni, M.; Wallner, S.; Ávila-Rodríguez, J.; Eissfeller, B. Estimating the time-to-first-fix for GNSS signals theory and simulation results. In Proceedings of the European Navigation Conference (ENCGNSS)-Proceedings, Toulouse, France, 23–25 April 2008; pp. 23–25. [Google Scholar]
- Dahlke, D.; Drakoulis, P.; Fernández García, A.; Kaiser, S.; Karavarsamis, S.; Mallis, M.; Oliff, W.; Sakellari, G.; Belmonte-Hernández, A.; Alvarez, F.; et al. Seamless Fusion: Multi-Modal Localization for First Responders in Challenging Environments. Sensors 2024, 24, 2864. [Google Scholar] [CrossRef]
- Realini, E.; Caldera, S.; Pertusini, L.; Sampietro, D. Precise GNSS Positioning Using Smart Devices. Sensors 2017, 17, 2434. [Google Scholar] [CrossRef]
- Paonni, M.; Anghileri, M.; Wallner, S.; Avila-Rodriguez, J.A.; Eissfeller, B. Performance assessment of GNSS signals in terms of time to first fix for cold, warm and hot start. In Proceedings of the 2010 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 25–27 January 2010; pp. 1051–1066. [Google Scholar]
- Wang, H.S.; Wang, H.Y.; Jwo, D.J. A Cumulant-Based Method for Acquiring GNSS Signals. Sensors 2024, 24, 6234. [Google Scholar] [CrossRef]
- Spirent. Spirent GSS6450 Multi-Frequency Record & Playback System. 2023. Available online: https://www.spirent.com/assets/u/datasheet-gss6450-multi-frequency-record-and-playback-system (accessed on 20 February 2025).
- Langley, R.B. NMEA 0183: A GPS receiver interface standard. GPS World 1995, 6, 54–57. [Google Scholar]
- u blox. u-blox F9 HPG 1.32. 2022. Available online: https://content.u-blox.com/sites/default/files/documents/u-blox-F9-HPG-1.32_InterfaceDescription_UBX-22008968.pdf (accessed on 20 February 2025).
- Robustelli, U.; Cutugno, M.; Pugliano, G. Low-Cost GNSS and PPP-RTK: Investigating the Capabilities of the u-blox ZED-F9P Module. Sensors 2023, 23, 6074. [Google Scholar] [CrossRef]
- Tomaštík, J.; Everett, T. Static Positioning under Tree Canopy Using Low-Cost GNSS Receivers and Adapted RTKLIB Software. Sensors 2023, 23, 3136. [Google Scholar] [CrossRef]
- Janos, D.; Kuras, P. Evaluation of Low-Cost GNSS Receiver under Demanding Conditions in RTK Network Mode. Sensors 2021, 21, 5552. [Google Scholar] [CrossRef]
- Daneshmand, S.; Jahromi, A.J.; Broumandan, A.; Lachapelle, G. GNSS Space-Time Interference Mitigation and Attitude Determination in the Presence of Interference Signals. Sensors 2015, 15, 12180–12204. [Google Scholar] [CrossRef] [PubMed]
- He, Z.; Zhao, H.; Feng, W. The Ionospheric Scintillation Effects on the BeiDou Signal Receiver. Sensors 2016, 16, 1883. [Google Scholar] [CrossRef] [PubMed]
- Han, J.; Tu, R.; Zhang, R.; Fan, L.; Zhang, P. SNR-Dependent Environmental Model: Application in Real-Time GNSS Landslide Monitoring. Sensors 2019, 19, 5017. [Google Scholar] [CrossRef] [PubMed]
- Paonni, M.; Anghileri, M.; Burger, T.; Ries, L.; Schlötzer, S.; Schotsch, B.; Ouedraogo, M.; Damy, S.; Chatre, E.; Jeannot, M.; et al. Improving the Performance of Galileo E1-OS by Optimizing the I/NAV Navigation Message. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 1134–1146. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GNSS | Tracked Satellites | |||
|---|---|---|---|---|
| Mean | Standard Deviation | Minimum | Maximum | |
| BeiDou | 6.6 | 1.3 | 4.0 | 10.0 |
| Galileo | 5.0 | 0.6 | 4.0 | 6.8 |
| GLONASS | 6.5 | 1.1 | 5.0 | 9.0 |
| GPS | 8.1 | 1.0 | 5.2 | 10.6 |
| TTFF | GNSS | Attenuation (dB) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 | ||
| Mean (s) | BeiDou | 50.6 | 55.6 | 64.7 | 80.7 | 118 | 187 | 234 | 349 | 439 | 517 | 586 |
| Galileo | 80.9 | 82.2 | 90.7 | 116 | 164 | 241 | 301 | 390 | 473 | 530 | 583 | |
| GLONASS | 23.6 | 24.2 | 25.4 | 31.7 | 42.0 | 70.3 | 96.9 | 178 | 256 | 330 | 470 | |
| GPS | 31.9 | 30.5 | 30.6 | 30.7 | 31.3 | 32.6 | 33.9 | 36.8 | 39.8 | 43.3 | 51.3 | |
| BeiDou | 12.4 | 26.5 | 49.8 | 66.1 | 70.3 | 88.1 | 100 | 127 | 128 | 95.8 | 27.8 | |
| Standard | Galileo | 52.9 | 50.5 | 58.2 | 77.0 | 108 | 138 | 149 | 140 | 107 | 88.7 | 39.2 |
| deviation (s) | GLONASS | 4.62 | 5.30 | 7.79 | 28.7 | 65.3 | 96.4 | 126 | 182 | 202 | 203 | 175 |
| GPS | 5.92 | 4.97 | 4.78 | 4.78 | 4.20 | 2.82 | 2.39 | 3.06 | 4.11 | 6.08 | 12.5 | |
| Minimum (s) | BeiDou | 38.5 | 41.8 | 45.1 | 48.0 | 53.6 | 76.3 | 117 | 167 | 198 | 273 | 447 |
| Galileo | 28.2 | 30.5 | 32.2 | 32.4 | 42.4 | 73.0 | 83.1 | 113 | 247 | 273 | 404 | |
| GLONASS | 18.1 | 18.1 | 18.1 | 18.1 | 18.6 | 20.1 | 20.1 | 25.8 | 30.5 | 43.9 | 63.0 | |
| GPS | 17.4 | 17.4 | 17.4 | 17.4 | 18.1 | 21.9 | 27.4 | 32.1 | 33.0 | 34.9 | 37.4 | |
| Maximum (s) | BeiDou | 154 | 225 | 384 | 589 | 600 | 600 | 600 | 600 | 600 | 600 | 600 |
| Galileo | 327 | 327 | 380 | 422 | 547 | 600 | 600 | 600 | 600 | 600 | 600 | |
| GLONASS | 46.3 | 49.5 | 72.7 | 210 | 600 | 600 | 600 | 600 | 600 | 600 | 600 | |
| GPS | 42.0 | 35.2 | 35.3 | 35.2 | 40.4 | 40.9 | 43.5 | 46.5 | 60.0 | 70.8 | 119 | |
| Horizontal Error | GNSS | Attenuation (dB) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 | ||
| Mean (m) | BeiDou | 2.62 | 2.72 | 3.20 | 3.95 | 4.87 | 4.14 | 3.70 | 4.66 | 5.34 | 6.40 | 7.71 |
| Galileo | 3.21 | 3.43 | 3.26 | 3.44 | 3.76 | 4.57 | 5.17 | 6.59 | 8.42 | 10.3 | 13.9 | |
| GLONASS | 5.29 | 5.83 | 6.98 | 9.94 | 13.5 | 18.6 | 22.0 | 27.0 | 30.3 | 32.5 | 43.6 | |
| GPS | 2.24 | 2.16 | 2.11 | 2.15 | 2.19 | 2.37 | 2.46 | 2.71 | 2.66 | 2.69 | 3.42 | |
| BeiDou | 1.62 | 1.71 | 2.96 | 5.18 | 7.51 | 3.23 | 2.28 | 3.85 | 3.33 | 4.41 | 5.15 | |
| Standard | Galileo | 3.65 | 4.12 | 3.79 | 3.75 | 3.56 | 3.95 | 4.50 | 6.09 | 7.27 | 9.78 | 16.8 |
| deviation (m) | GLONASS | 3.94 | 4.70 | 6.14 | 10.4 | 11.0 | 15.7 | 20.7 | 27.3 | 30.8 | 30.9 | 37.1 |
| GPS | 1.47 | 1.37 | 1.32 | 1.35 | 1.36 | 1.60 | 1.78 | 1.79 | 1.71 | 1.83 | 2.32 | |
| Minimum (m) | BeiDou | 0.22 | 0.37 | 0.44 | 0.50 | 0.42 | 0.67 | 0.70 | 0.54 | 0.74 | 1.01 | 1.61 |
| Galileo | 0.25 | 0.32 | 0.46 | 0.63 | 0.62 | 0.71 | 0.64 | 0.52 | 1.22 | 1.57 | 2.58 | |
| GLONASS | 0.62 | 0.71 | 1.10 | 1.56 | 1.68 | 1.78 | 4.28 | 4.04 | 2.59 | 3.69 | 3.49 | |
| GPS | 0.21 | 0.21 | 0.22 | 0.26 | 0.41 | 0.23 | 0.40 | 0.85 | 0.59 | 0.58 | 0.99 | |
| Maximum (m) | BeiDou | 11.5 | 10.7 | 26.3 | 48.6 | 66.4 | 21.2 | 12.6 | 32.3 | 18.1 | 23.2 | 29.9 |
| Galileo | 29.3 | 31.0 | 26.5 | 23.7 | 24.9 | 26.6 | 28.3 | 36.4 | 40.2 | 68.3 | 131 | |
| GLONASS | 30.4 | 37.5 | 46.8 | 63.3 | 69.2 | 72.2 | 114 | 155 | 173 | 155 | 226 | |
| GPS | 8.30 | 6.71 | 6.45 | 7.26 | 7.59 | 8.45 | 10.5 | 10.3 | 9.80 | 12.6 | 17.0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernando-Ramiro, C.; Gamallo-Palomares, Ó.; Junquera-Sánchez, J.; Gómez-Sánchez, J.A. Time to First Fix Robustness of Global Navigation Satellite Systems: Comparison Study. Sensors 2025, 25, 1599. https://doi.org/10.3390/s25051599
Hernando-Ramiro C, Gamallo-Palomares Ó, Junquera-Sánchez J, Gómez-Sánchez JA. Time to First Fix Robustness of Global Navigation Satellite Systems: Comparison Study. Sensors. 2025; 25(5):1599. https://doi.org/10.3390/s25051599
Chicago/Turabian StyleHernando-Ramiro, Carlos, Óscar Gamallo-Palomares, Javier Junquera-Sánchez, and José Antonio Gómez-Sánchez. 2025. "Time to First Fix Robustness of Global Navigation Satellite Systems: Comparison Study" Sensors 25, no. 5: 1599. https://doi.org/10.3390/s25051599
APA StyleHernando-Ramiro, C., Gamallo-Palomares, Ó., Junquera-Sánchez, J., & Gómez-Sánchez, J. A. (2025). Time to First Fix Robustness of Global Navigation Satellite Systems: Comparison Study. Sensors, 25(5), 1599. https://doi.org/10.3390/s25051599