Abstract
Fluxgate-based current sensors are usually implemented for DC current detection, but their complex structure and circuits with large volume and high cost have been limiting their applications. This paper presents a low-cost sensor with a one-core-three-winding structure that can be suitable for integrated measurement in distribution system applications. Based on a self-oscillating scheme, the new sensor introduces an induction winding to suppress the noise caused by the transformer effect instead of adding more magnetic cores. The transmission and transfer functions of the sensor, based on nonlinear magnetization, are conducted for the qualitative and quantitative analysis. A prototype is fabricated and several specifications including linearity, small-signal bandwidth, output noise, and power-on repeatability are characterized. Experimental results show that the proposed sensor realizes an accuracy better than 0.15% with a range of 0–600 A. By implementing the proposed noise suppression method, the signal-to-ratio is improved from 19.55 dB to 48.88 dB. Compared with a traditional fluxgate sensor with a three-core-four-winding structure, the proposed sensor reduces the volume by 44.4% and the cost by 23.6%, indicating a good prospect for practical applications.
1. Introduction
With the rapid increase in the installed capacity of new energy power generation, addressing the issue of new energy consumption has become a pressing concern for the power system [1]. In response, DC distribution systems have emerged as a crucial development trend in modern distribution systems due to their ability to efficiently and flexibly accommodate distributed generation. Furthermore, the growing demand for computing power in artificial intelligence applications has led to an increased need for internet data centers, which can also benefit from DC distribution systems due to their 10–20% lower power costs than AC systems. The protection and control of DC distribution systems rely on electrical appliances that operate based on accurate current detection strategies. In this study, the authors have investigated several commonly used DC current detection methods, including shunt, Hall effect, giant magnetoresistance, tunnel magnetoresistance, magneto-optical, and fluxgate [2,3,4,5,6,7]. The features of these different current detection methods, such as bandwidth, accuracy, temperature drift, range, and power dissipation, are discussed in Table 1. Among these methods, the fluxgate method has garnered significant attention due to its high accuracy, low temperature drift, and low power dissipation.

Table 1.
Features of different current detection methods.
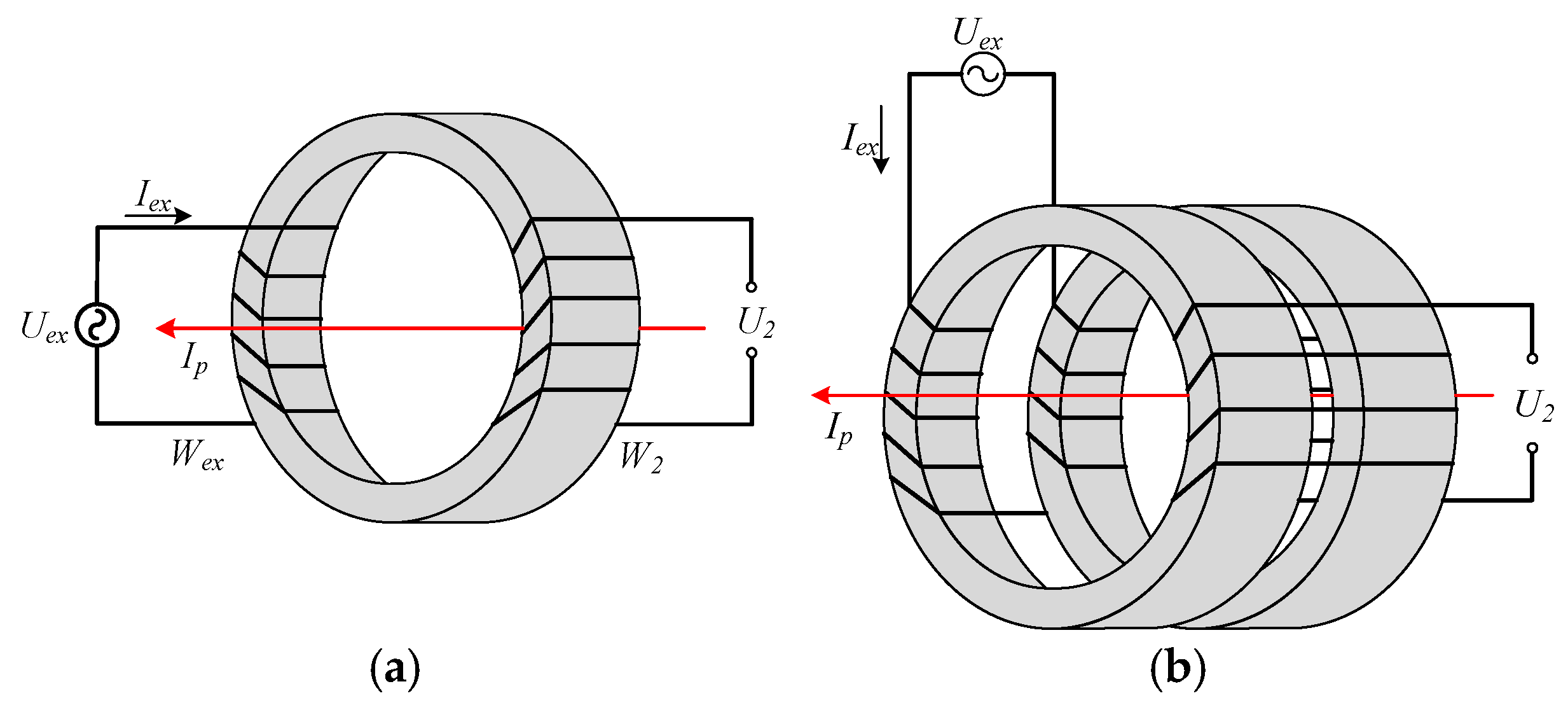
Previous research has established that fluxgate-based sensors are quite suitable for high-precision detection and power system applications [8]. A traditional magnetic modulation DC sensor probe, shown in Figure 1a, realizes the DC current detecting by the second harmonic. It has previously been observed that the amplitudes of even harmonics are proportional to the magnitude of the primary current Ip [9]. Therefore, the magnitude and the direction of Ip could be detected by obtaining second-harmonic parameters through specific demodulation circuits. Evidence indicates that the rather small even harmonic amplitudes make it easy to be submerged in the noise caused by the transformer effect, resulting in a low signal-to-noise ratio (SNR) [10]. Therefore, several attempts have been made to improve the SNR by implementing dual-toroidal magnetic cores, as shown in Figure 1b. The exciting current induces magnetic fluxes of the same magnitude and the opposite direction in the dual toroidal cores. In this way, the odd harmonics in the inductive voltage are neutralized, while the even ones are superposed to improve the SNR [11]. However, the dual-core structure requires more installation space along with complicated modulation circuits. Furthermore, accuracy loss from the inconsistency of the two cores is inevitable [12].

Figure 1.
Scheme of the magnetic modulation current probes. (a) Traditional magnetic modulation current probe. (b) Dual-core magnetic modulation current probe.
Some studies provided another magnetic modulation method, in which the magnetic core with DC bias magnetic flux is treated as a non-linear impedance in a self-oscillating circuit [12,13,14,15]. The self-oscillating fluxgate method has been widely used to reduce complexity and cost while keeping the advantages of traditional fluxgate sensors [16]. In this way, the dismissal of the exciting supply contributes to the decrease of both power dissipation and volume. The authors in the literature [17,18] found that the exciting current’s average value and duty ratio are proportional to the primary current when the parameters of the magnetic core and the oscillating circuit components are cautiously designed. Extensive research has been carried out to improve the range, accuracy, stability, and SNR for metrological calibration and on-site measurement [14,19]. High accuracy, wide range, or high stability always come with the sacrifice of volume [20]. However, the installation space is valuable in appliances for distribution systems. Few works focus on the realization of a relatively high precision measurement within a limited volume for integrated applications.
This article presents a low-cost self-oscillating fluxgate-based current sensor with a one-core-three-winding structure and relatively simple circuits for DC distribution system applications. Firstly, the operating principle, mathematical model, and quantitative analysis of the transformer based on nonlinear magnetization are introduced. Then, the design of the magnetic components and circuits is presented. As verification, an example prototype for a specific appliance is realized and several specifications are characterized. Finally, comparison results between the proposed sensor and a multi-core fluxgate sensor are given.
2. Methodology
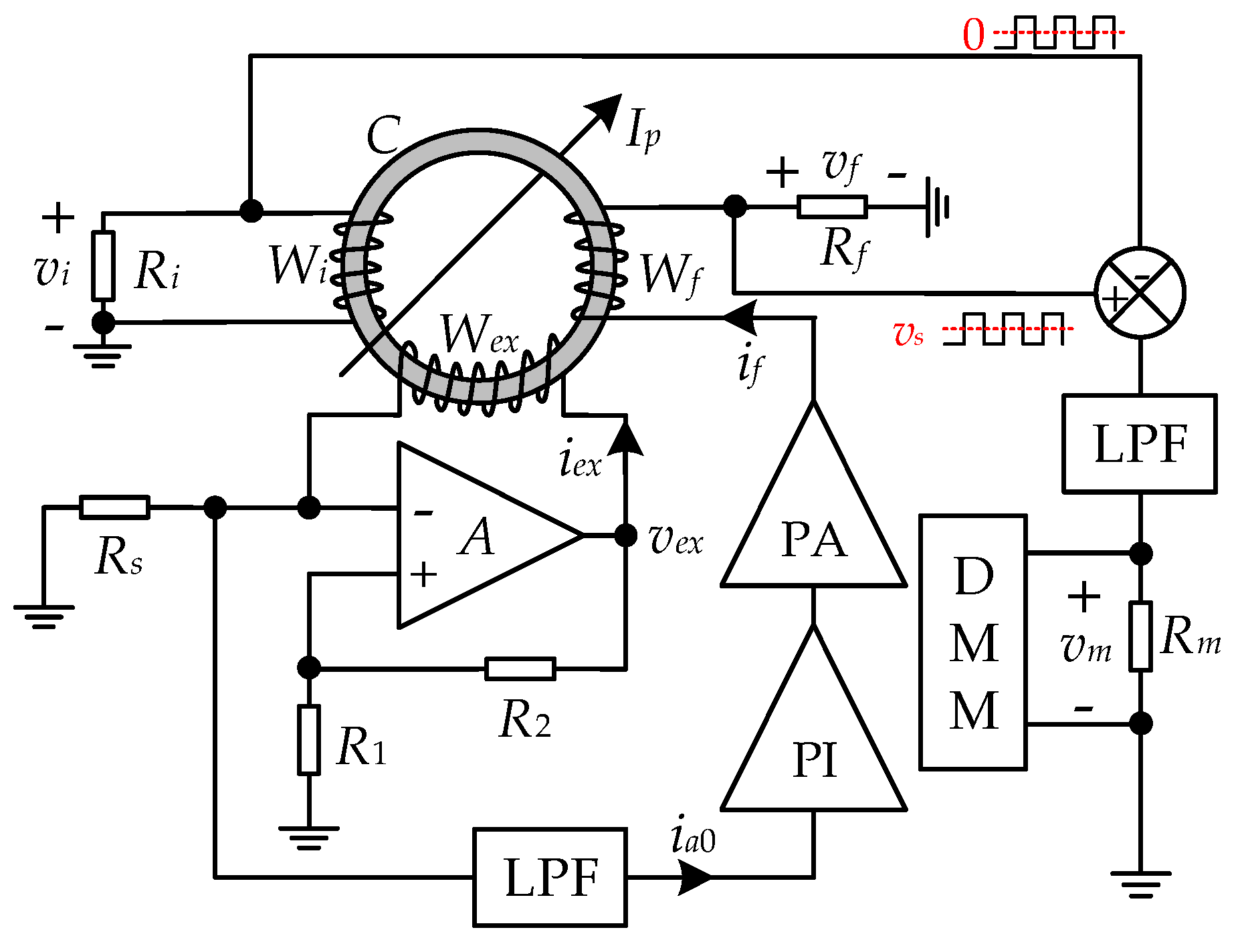
The diagram of the sensing system is shown in Figure 2. The sensor is composed of a sensor probe, a self-oscillating circuit, a feedback circuit, and a noise suppression circuit. The sensor probe contains a magnetic toroidal core wound with an excitation winding Wex with Nex turns, a feedback winding Wf with Nf turns, and an induction winding Wi with Ni turns. The primary current Ip flows through the magnetic core via a single turn (Np = 1) conductor. Wex, along with a voltage comparator, a sampling resistor Rs, and two threshold resistors R1 and R2, form the self-oscillating circuit, generating alternating square waves to saturate the core periodically. Coupled with the DC flux by Ip, the non-linear alternating magnetic flux turns Wex into a variable nonlinear inductor. The feedback circuit consists of a low pass filter (LPF), a proportional-integral (PI) control circuit, a power amplifier (PA), Wf, and a feedback resistor Rf. The noise suppression circuit is formed by Wi, a noise sampling resistor Ri, a subtraction circuit, an LPF, and an output sampling resistor Rm. The voltage vm on the potential terminal of Rm is measured by a digital multimeter (DMM) as the output signal of the proposed sensor.

Figure 2.
Diagram of the proposed self-oscillating fluxgate-based current sensor.
2.1. Measurement Principle
The differential equation of the self-oscillating fluxgate circuit is expressed as follows:
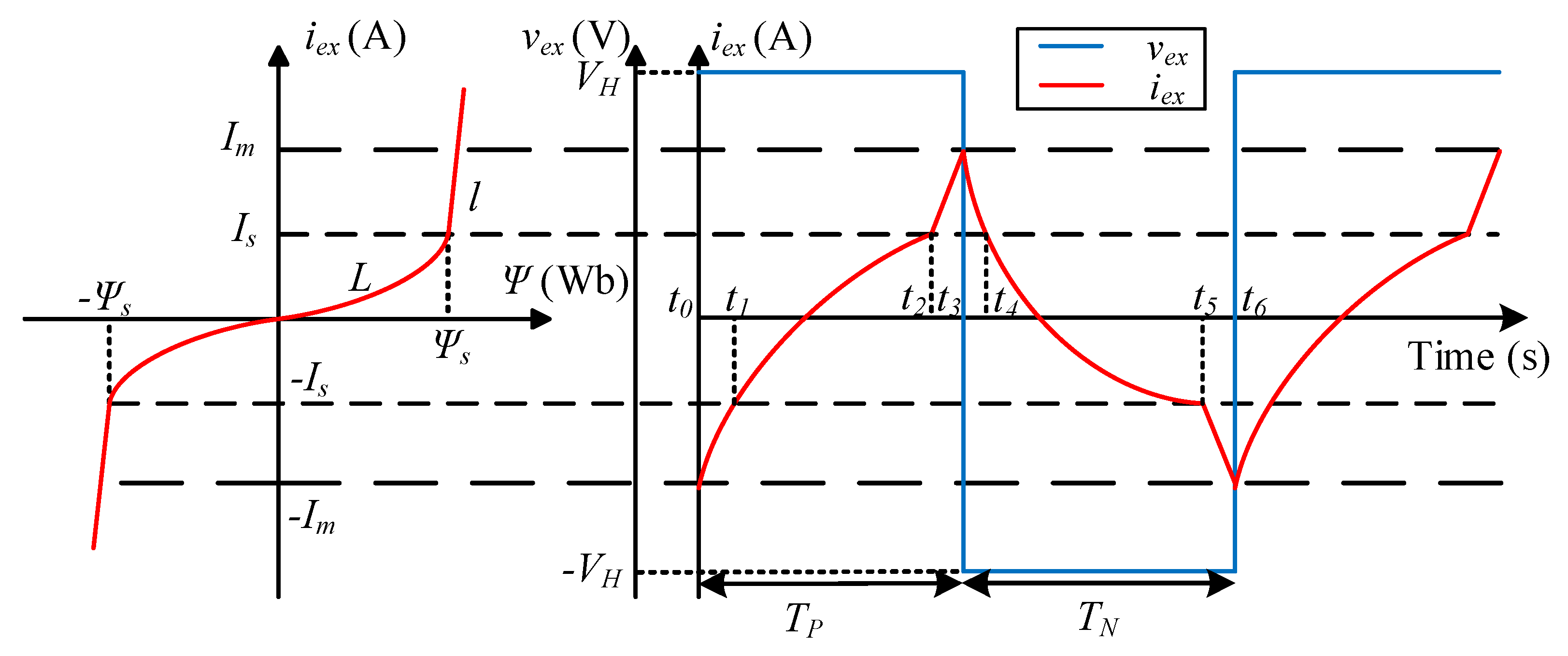
where Rs is the sampling resistance, and Rc, iex, L, and vex are the internal resistance, the current, the inductance, and the voltage of the exciting winding Wex, respectively. The non-linear magnetic flux and the exciting voltage and current waves are shown in Figure 3. It can be observed that the rising exciting current passes through the reverse saturation region, unsaturation region, and forward saturation region within the TP interval. Since the time constants for the saturation and the unsaturation regions are different, the TP interval is divided into three intervals.

Figure 3.
Waveforms of the self-exciting fluxgate circuit when the primary current is nonzero. Waveforms on the left are the nonlinear magnetic flux, while the ones on the right are the exciting voltage and current.
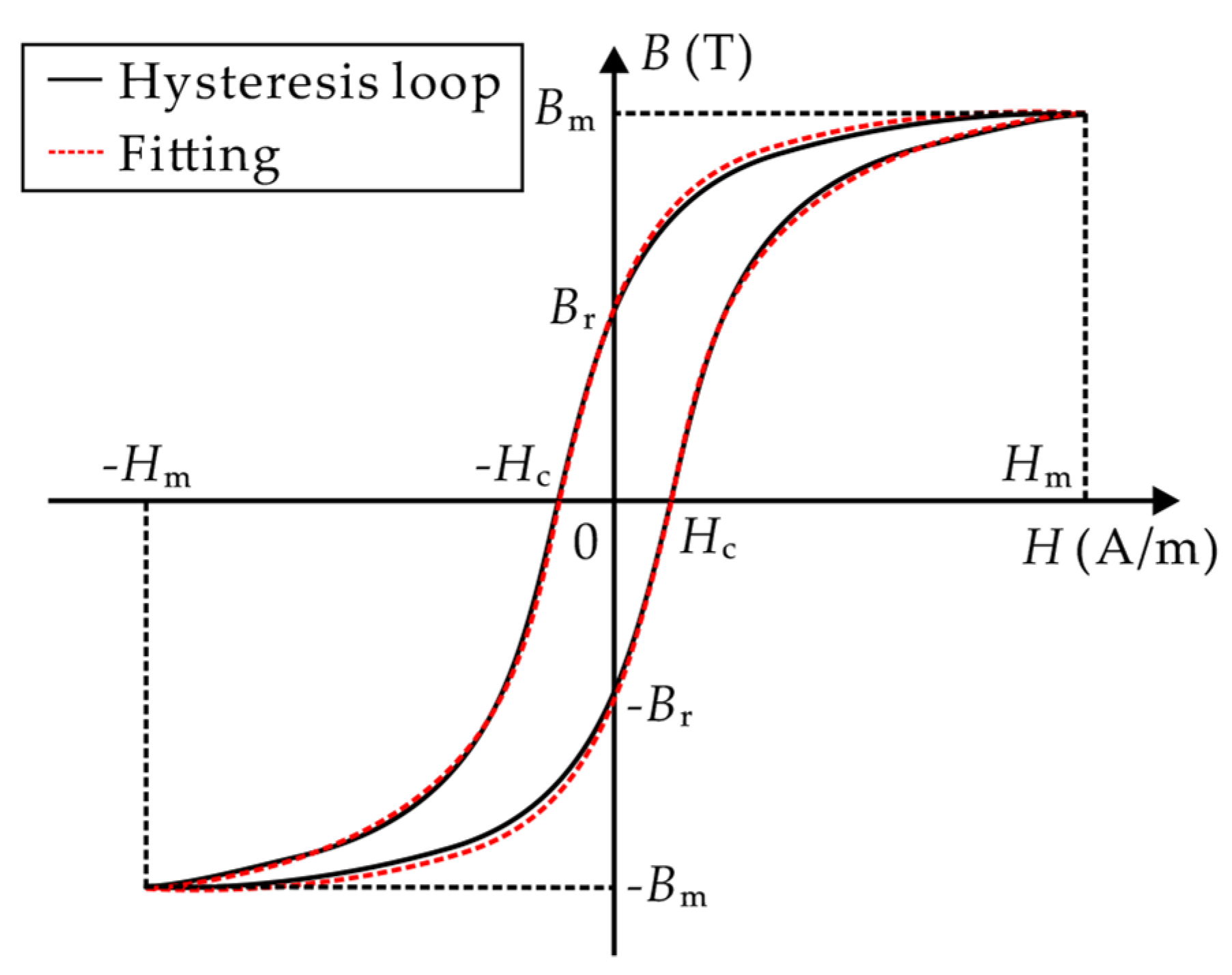
M. Ponjavic and R. M. Duric from Belgrade University were the first to establish an average current model based on the arctangent function model of the magnetization curve [16]. To obtain a more accurate fitting function of the magnetization curve, this paper introduces the hysteresis effect based on the arctangent fitting by Equation (2), as shown in Figure 4.

Figure 4.
Hysteresis loop and its arctangent fitting curve.
In Equation (2), the algebraic symbols and . B is the magnetic flux density, H is the magnetic field intensity, and Hc is the coercivity parameter. TP and TN are the time intervals for the rising and falling exciting currents, respectively. μ0 is the permeability of the vacuum, μm is the maximum (Max.) magnetic permeability of the magnetic core, and Bs is the saturation magnetic flux density. According to Ampere’s law, Equation (2) can be rewritten to obtain the time function of the flux density.
where Nex is the number of the exciting winding Wex, n is the ratio of the primary winding number Np to Nex, and lc is the effective magnetic length. Thus, the variable inductance L(t) can be calculated by the magnetic flux ψ as follows:
where the algebraic symbols , , , and . S is the cross-sectional area of the magnetic core. It is hard to directly calculate the average value of the exciting current iex by calculating the indefinite integral using Equations (1) and (4). Therefore, this paper uses the average voltage Vex to derive the expression of Iex.
where vR is the sum of the voltage of Rs and Rc, and vL is the voltage of L. According to the waveforms in Figure 4, the exciting voltage vex in one cycle only equals . Thus, the average voltage Vex can be calculated as follows:
where VH is the amplitude of the exciting voltage. The average value of iex can calculated as follows:
where Iex is the average value of iex, and IH is the steady-state current under VH. According to Figure 4, the values of the exciting current iex at the time of 0, TP, TP + TN are expressed as follows:
where Im is the peak value of the exciting current. To solve the differential equation, Equation (1) is converted as follows:
Combined with Equation (8), the definite integral of Equation (9) is derived as follows:
By substituting Equation (4) into Equation (10), the intervals TP and TN are obtained as follows:
where the algebraic symbols are presented in Equation (12).
In the sensor’s practical design, Rs, Rc, and n are usually rather small, resulting in a relation between IH, the exciting current peak value Im, and the primary current Ip.
According to Equation (13), the logarithmic terms in Equation (11) are approximately equal to zero. When the conditions in Equation (13) hold, Equation (7) can be simplified by substituting Equation (11).
When , the terms with IH as the denominator are approximately equal to zero, deriving a linear model between the exciting current Iex and the primary current Ip.
The linear model is based on the hypothesis of and , which indicates that higher Max. magnetic permeability μm, lower saturation magnetic flux density Bs, and lower coercivity Hc are beneficial to improve the linearity. In the closed-loop system, the self-oscillating circuit detects the DC bias magnetic balance inside the magnetic core and outputs ia0, which characterizes the magnetic balance condition. The feedback circuit generates feedback current to counteract the magnetic bias. When the magnetic balance is achieved in ideal conditions, Ip can be measured by if.
where if is the current of the feedback winding.
2.2. Analysis of the Transformer Noise and Its Suppression
In a closed-loop system, especially in the architecture of a single magnetic core, the noise caused by the transformer effect is more pronounced. Since Wf and Wex are wound on the same magnetic core, the magnetic flux from the exciting current induces a voltage Ef in Wf.
where Nf is number of the feedback winding, and coefficient k is related to the width and thickness of the magnetic core. Assuming the magnetic balance condition is achieved, iex can be obtained as follows:
where is is the current corresponding to the saturation knee point of the magnetic core, τ is the time constant of the exciting circuit, and . By substituting Equation (18) to Equation (17), it gives the following:
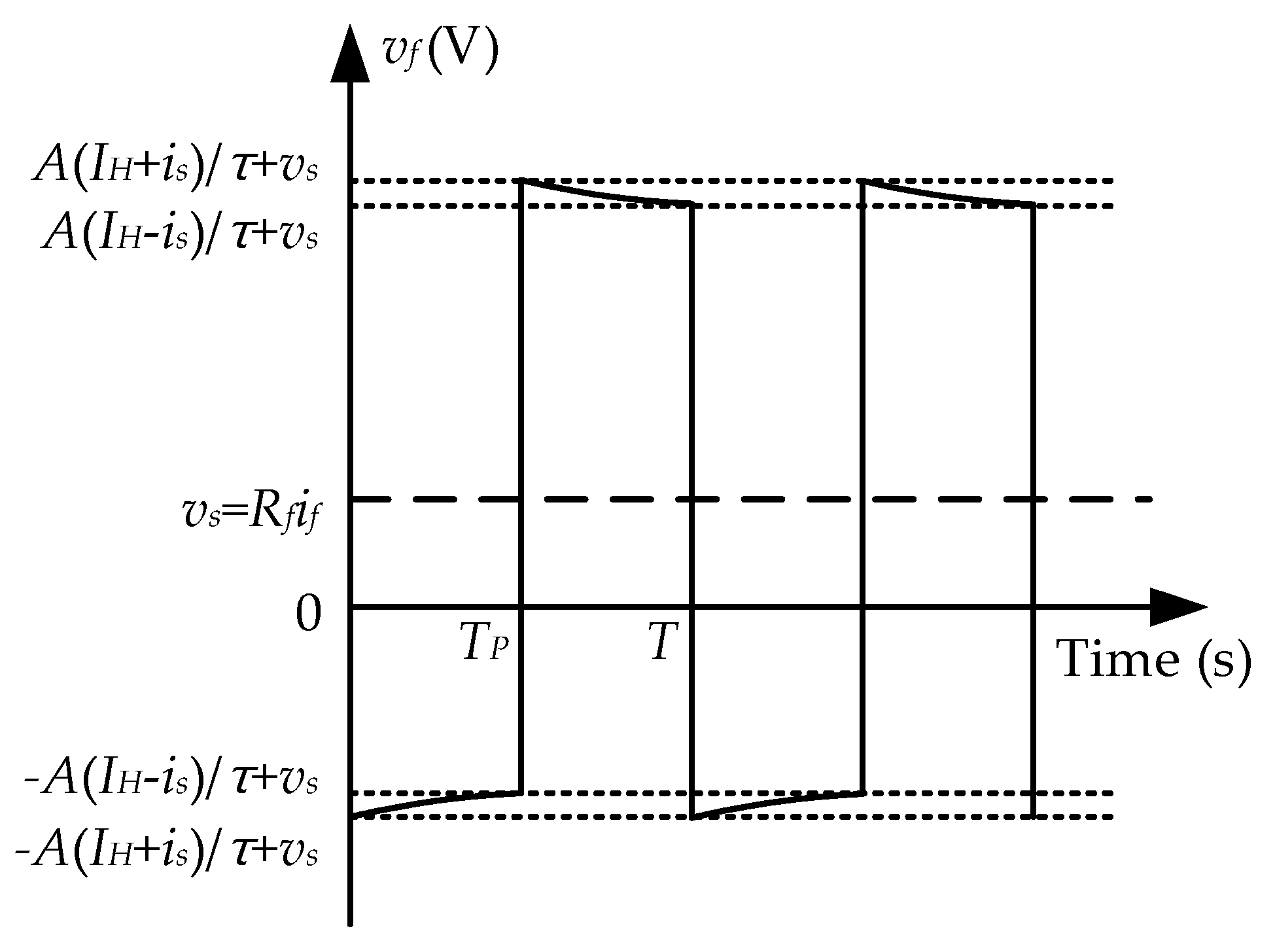
The voltage vf is the sum of Ef and the feedback voltage vs at Rf, resulting in a similar square wave oscillating up and down with vs as the reference value, as shown in Figure 5. Due to the presence of noise, the SNR of the output signal vm is rather low. To suppress the noise caused by the transformer effect, we introduce an induction winding Wi instead of a signal filter. The turn number of Wi is consistent with one of the feedback winding Wf to obtain an induced voltage vi, which shares the same amplitude and phase as Ef. The noise is suppressed by implementing a subtraction operation circuit for vi and Ef, leaving only vs. In practice, it is difficult for vi and Ef to achieve complete amplitude and phase consistency. Therefore, an LPF circuit is utilized to help eliminate the residual noise and obtain a smooth voltage waveform of vm.

Figure 5.
Waveforms of vf at the feedback resistor with .
2.3. Derivation of the Transfer Function and Steady Error
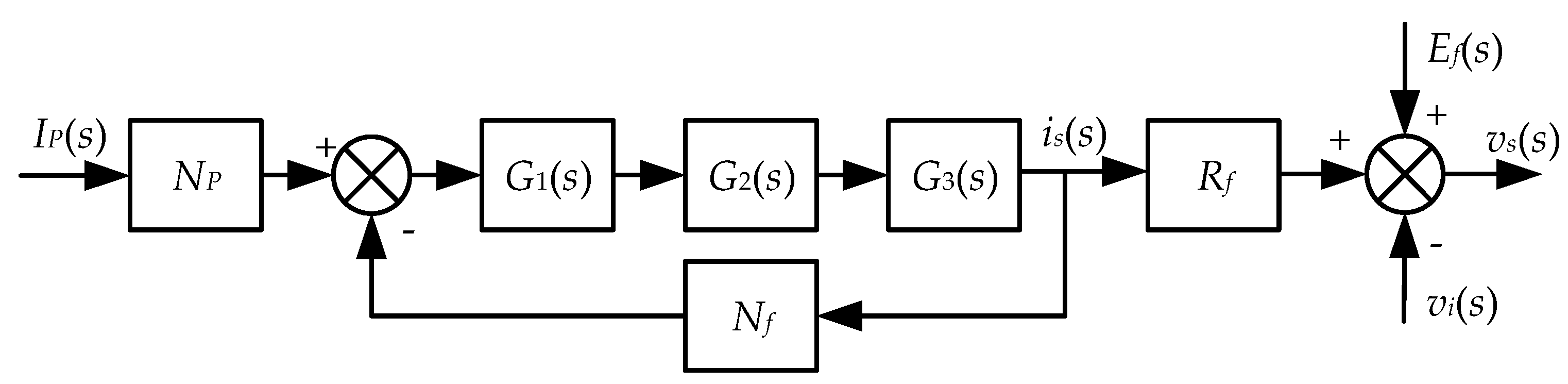
During the derivation of the transfer function of the closed-loop system, some errors in the system are idealized to simplify the model. Firstly, the hysteresis loss, eddy current loss, and leakage flux are ignored. Secondly, we assume that the LPFs, compactors, and PA are ideal for neglecting their influence on DC circuits. Finally, the parasitic capacitances inside the windings and in the printed circuit board layout are not considered, ignoring the capacitive error of the system. Based on the above assumptions, the block diagram of the closed-loop system is obtained, as shown in Figure 6.

Figure 6.
Control block diagram of the closed-loop system.
Ef(s), including a transformer model composed of Wex, Wf, and the magnetic core, is the noise caused by the transformer effect on Wf. Ef(s) is represented by the following equation.
Here and , leading to a cancel out of Ei(s) and Ef(s). In this way, only the transfer function between Ip and if is considered in the closed-loop system.
where G1(s), G2(s), and G3(s) are the transfer functions of the self-oscillating circuit, the PI and PA circuits, and the feedback circuit, respectively.
where KPI is the proportional factor of the PI circuit, KPA is the gain of the PA circuit, ω is the radian frequency, τPI is the time constant of the PI circuit, Rm is the output sampling resistance, and Zs is the complex impedance of the feedback winding Wf. The closed-loop system reaches a steady state in the condition that the magnetic flux by the feedback current exactly offsets the one by the primary current Ip. The transfer function in the steady state is . Compared to Equation (21), the steady error of the closed-loop system σ is conducted as follows:
When the primary current Ip is a pure DC current, the current frequency is 0 Hz, indicating that jω equals 0. Thus, Equation (23) is rewritten as follows:
Equation (24) indicates that the closed-loop system is an error-free system under the previously mentioned assumptions. The theoretical error that approaches 0 is mainly attributed to the PI circuit, whose gain approaches infinity when the input is a DC signal. However, an infinite gain is impossible in practical applications, resulting in an error caused by the open-loop gain. In addition, Equation (24) indicates that increasing the number of Nf and Rs, and decreasing the number of Nex and Rm, can also reduce the steady-state error of the closed-loop system.
3. Design and Realization
Based on the methodology in Section 2, this section illustrates the characteristics analysis and design criteria of the proposed current sensor for DC distribution system applications. An example prototype was designed for a DC molded case circuit breaker (MCCB) from CHINT company (Wenzhou, China) with a rated current of 400 A, whose inner installation space for each phase is 48 × 48 × 30 mm (length × width × height). Considering the measurement in normal and 1.5 times overload operations, the current sensor is expected to achieve a higher accuracy than 0.5% in a range of 0 to 600 A.
3.1. Magnetic Core and Windings
According to Equation (11), the design parameters that affect the sensor performance can be divided into magnetic and circuit parameters. The magnetic parameters include the Max. magnetic permeability μm, saturation magnetic flux density Bs, coercivity Hc, effective magnetic path length lc, magnetic core cross-sectional area S, and exciting winding turn number Nex. The authors found that the proposed sensor gains a higher accuracy with larger μm and Nex, and smaller Bs, Hc, and lc, while the influence of S on the system performance is negligible. According to Equation (16), it can be inferred that increasing the turn number Nf of the feedback winding Wf leads to an increase in the measurement range of the closed-loop system. However, the inductance of Wf increases by the square of Nf, challenging the driving capability of the PA circuit. Similarly, the time constant of the system also increases with Nf, resulting in a worse dynamic responsibility. Furthermore, an increase in Nf will enlarge the noise caused by the transformer effect, which is proportional to Nf in Equation (19). The Fe-base Nanocrystalline Alloy in model 1K107, with high Max. magnetic permeability, low saturation magnetic flux density, and low coercivity, is selected for the magnetic core. Taking the current detection range and the installation limits of the MCCB as constraint conditions, the parameters of the magnetic core and the windings are designed and optimized by electromagnetic and circuit simulations combined with a genetic algorithm. The magnetic parameters are listed in Table 2.
Table 2.
Design of the magnetic parameters.
3.2. Circuit Design
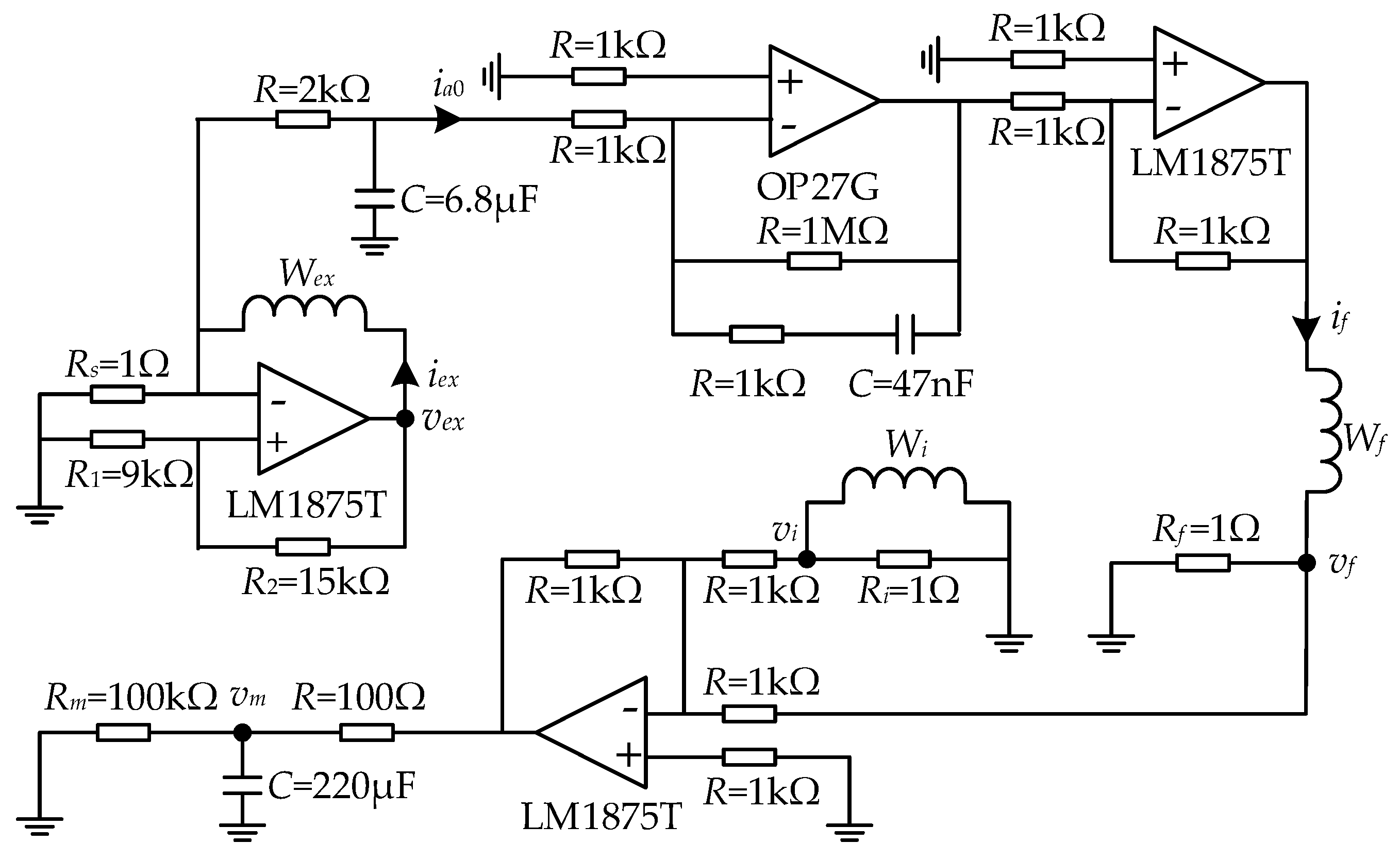
The scheme of the analog circuit of the proposed current sensor is shown in Figure 7. The exciting winding Wex is excited by the self-oscillating circuit, whose square voltage is realized by a power amplifier chip (LM1875T). To ensure the normal operation of the exciting square voltage generation, the voltage drop on Rs by the steady current IH must be larger than the one on R1. The constraint is expressed as follows:
where R1 and R2 are the threshold resistances. The right-side term of Equation (21) is denoted as the flip voltage ratio, which is a monotonic positive correlative to the accuracy and range of the proposed sensor.

Figure 7.
Circuit scheme of the proposed current sensor.
The cut-off frequency of the LPF connected to Wex is designed as 11.70 Hz with a simple RC circuit, while the oscillating frequency is designed as 270 Hz. Amplifier OP27G, with a high slew rate of 2.8 V/μs and a wide gain bandwidth of 8 MHz, is selected for the PI circuit because of the demand for rapid voltage flipping. The proportionality coefficient KPI and the integral time are 1 and 4.7 μs. The selection of small values of KPI and integral time are beneficial to improve loop stability and expand bandwidth at high frequencies, respectively. The PA circuit with a gain of −1 is built to supply a sufficiently large feedback current achieving the magnetic balance inside the magnetic core. Since the resistor in the LPF of the noise suppression circuit will participate in voltage distribution, the ratio of Rm to the resistor in the LPF should be large enough to improve the sampling accuracy. Simulation at a current of 250 A was carried out in the NI (Austin, TX, USA) Multisim software V14 to verify the circuit design.
The effect of the noise suppression circuit is presented in Figure 8. Without the noise suppression circuit, the sensor’s output voltage is measured on the feedback resistor Rf, marked as vf. As expected, the voltage vf in Figure 8 is consistent with the frequency of the exciting voltage square wave. The signal vf is an oscillating wave with an average value of 0.5 V, while the SNR is 3.35 dB. This measured signal is averaged, transferred to a current value, and multiplied Nf times to obtain the primary current Ip. With the noise suppression circuit, the induced voltage vi generated on the induction winding Wi is conducted to cancel out the oscillating square wave in vf. Regardless of the high-order harmonics, signal vi is consistent with the amplitude and phase of signal vf, resulting in a rather smooth DC signal vm after subtraction and filtering. By extracting a segment from the vm waveforms, the ripple voltage caused by voltage fluctuations is under scrutiny, as shown in Figure 9. Analysis shows that the peak-to-peak value of ripple voltage in vm is 4.33 mV, giving an SNR of 45.61 dB. Results show that a significant improvement is achieved by implementing the noise suppression circuit.

Figure 8.
Simulation results of the induced and output voltage before and after noise suppression at the primary current of 250 A.

Figure 9.
Simulation results of the ripple voltage in vm at the primary current of 250 A.
3.3. Finished Prototype
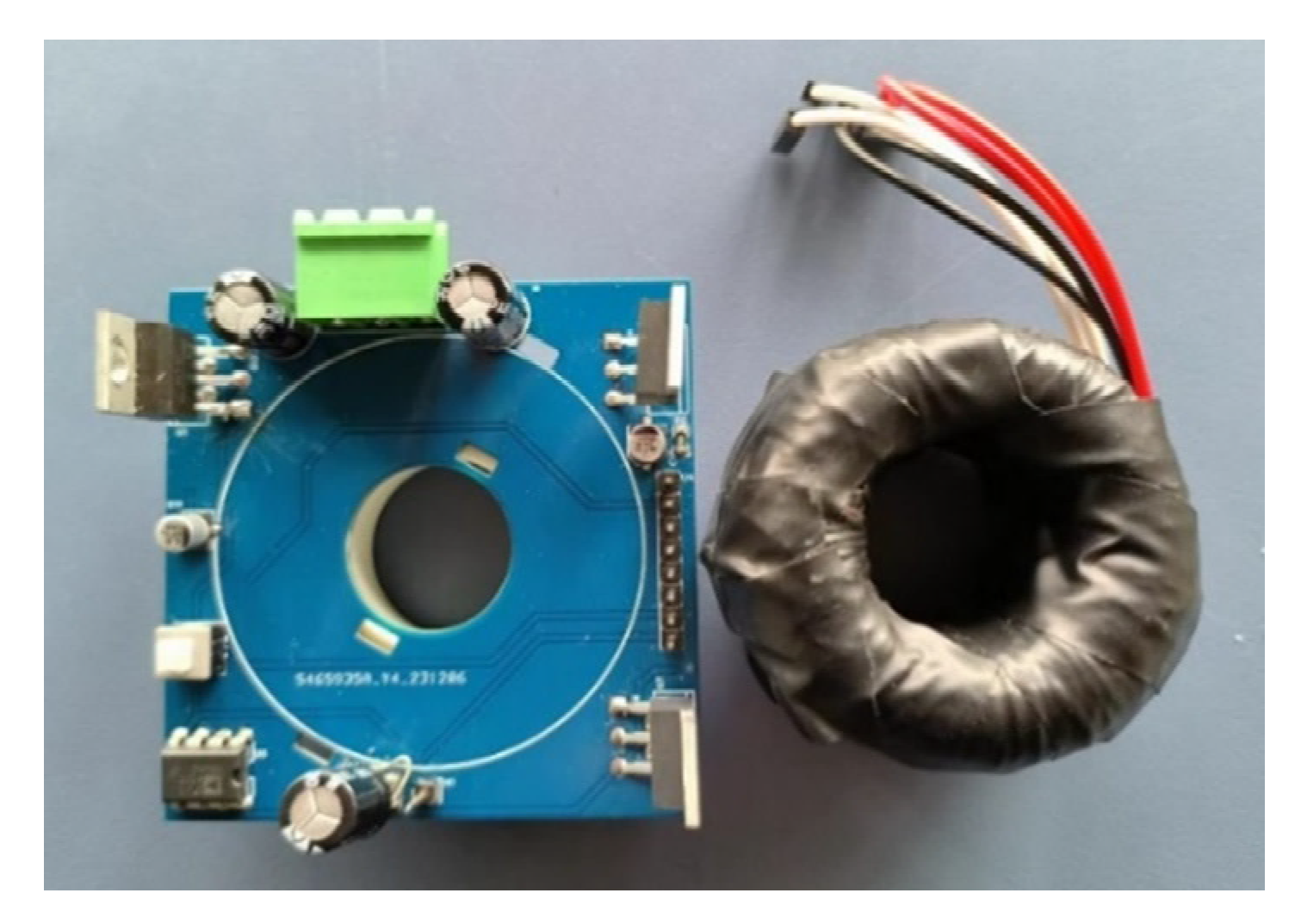
A prototype based on the designed single-core-three-winding sensor is fabricated and shown in Figure 10. The dimensions of the sensor probe are 43.81 × 23.37 × 20.54 mm in external diameter, internal diameter, and height, which can be installed in CHINT’s MCCBs with a rated current of 400 A.

Figure 10.
Photograph of the prototype sensor.
4. Experimental Results and Discussion
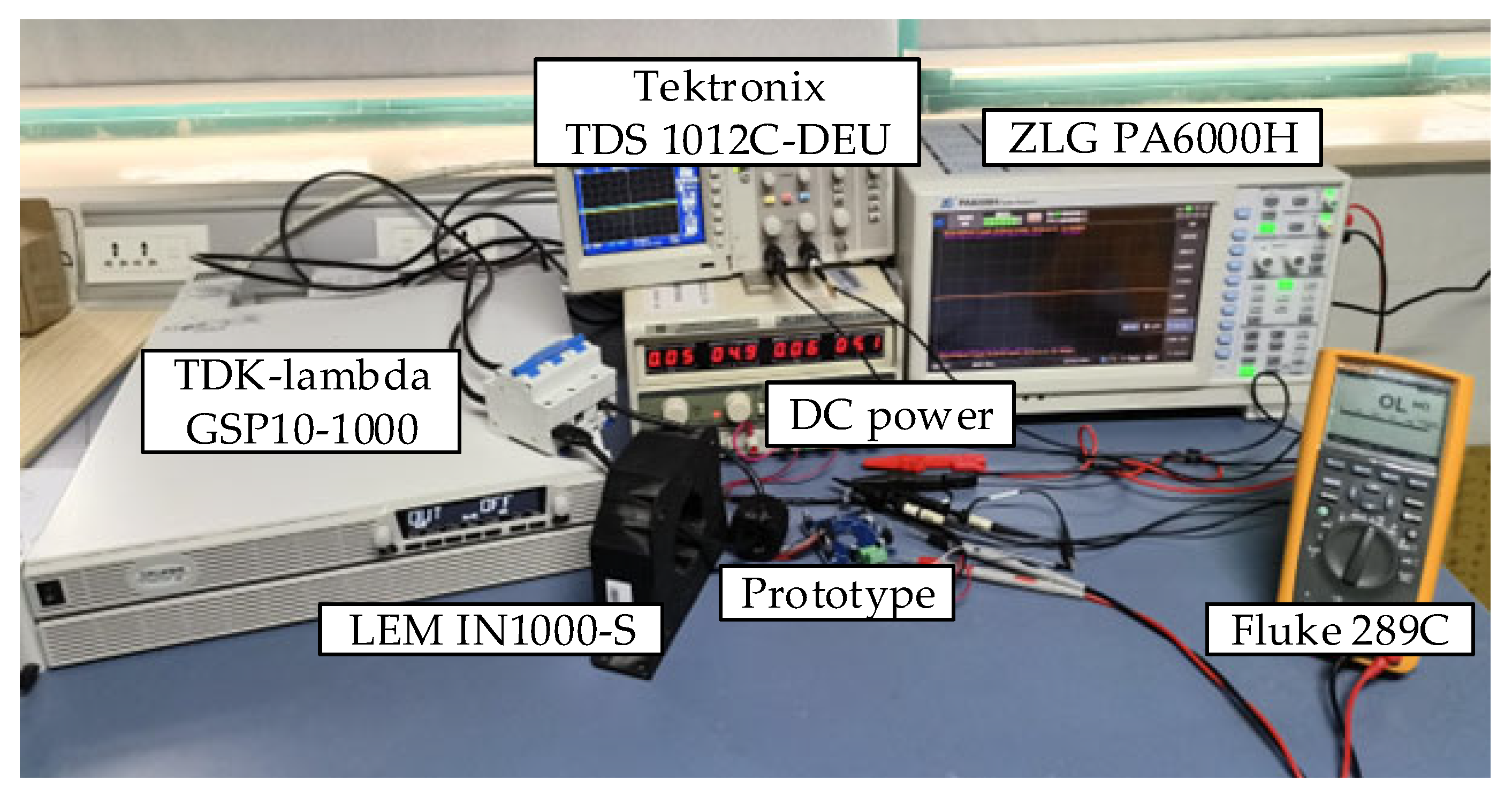
The experiment setup is shown in Figure 11. The primary current Ip is generated by a TDK-lambda (Tokyo, Japan) GSP10-1000 power supply with a rated current output of 1000 A, a Max. line regulation of 0.05% at the rated current, and a temperature stability of 0.01%. The actual value of Ip is precisely measured by a LEM (Geneva, Switzerland) IN1000-S current sensor with an accuracy of 0.0018% and a ZLG (Guangzhou, China) PA6000H power analyzer with an accuracy of 0.01%. The voltage and current waves are observed by a Tektronix (Beaverton, OR, USA) TDS 1012C-DEU oscilloscope. The voltage root mean square (RMS) on the potential terminal of the output sampling resistor Rm is measured by a Fluke (Everett, WA, USA) 289C with an accuracy of 0.025%. The voltage RMS is then divided by n to obtain the measured current of the proposed current sensor. To evaluate the performance of the proposed sensor, specifications including linearity, small-signal bandwidth, output noise, and power-on repeatability are characterized. Furthermore, the characteristics of the proposed sensor are compared with other sensors.

Figure 11.
Experiment setup.
4.1. Linearity
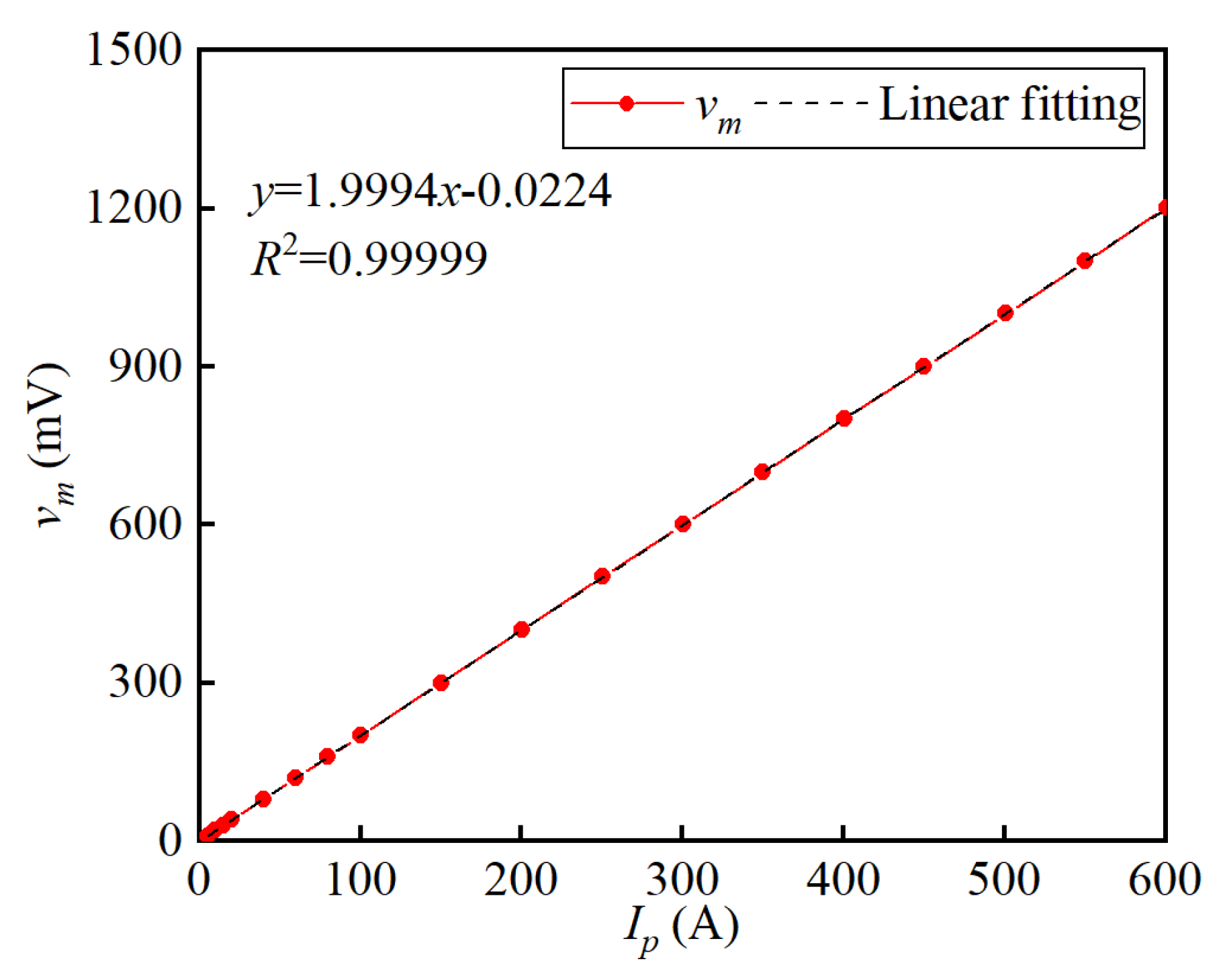
The linearity is measured by varying the primary current from 0 A to 20 A at 5 A intervals, from 20 A to 100 A at 20 A intervals, and from 100 A to 600 A at 50 A intervals. Figure 12 shows the experimental verified linear dependence between vm and Ip. The linear fitting equation indicates that the sensitivity of the proposed current sensor is 1.9994 mV/A, which is very close to the theoretical value of 2 mV/A calculated by . When the primary current Ip is 600 A, the output signal vm is 1201.50 mV. The Max. linear absolute error value is 0.837 mV, indicating that the linearity of the prototype is 0.07%.

Figure 12.
Relationship between the output voltage vm and the primary current Ip.
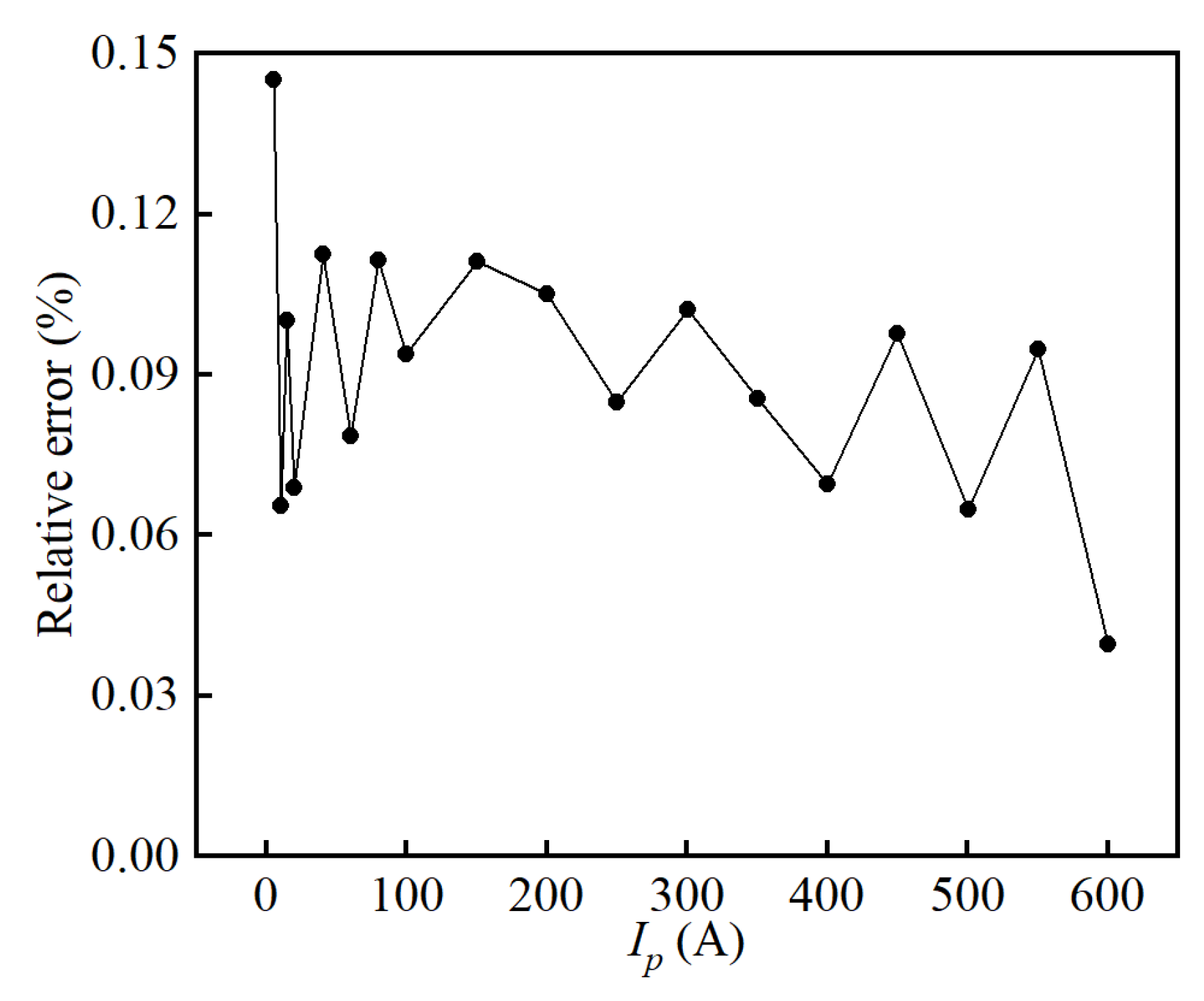
Figure 13 shows the relative errors of the prototype. It shows that the relative errors of the designed sensor are below 0.15%, while the Max. relative error is discovered when the primary current is as small as 5 A as 0.83% of the full range due to the influences of errors from, e.g., parasitic capacitance, zero offset, unideal gain, and so on.

Figure 13.
Relative errors of the proposed sensor in the range of 0–600 A.
4.2. Small-Signal Bandwidth
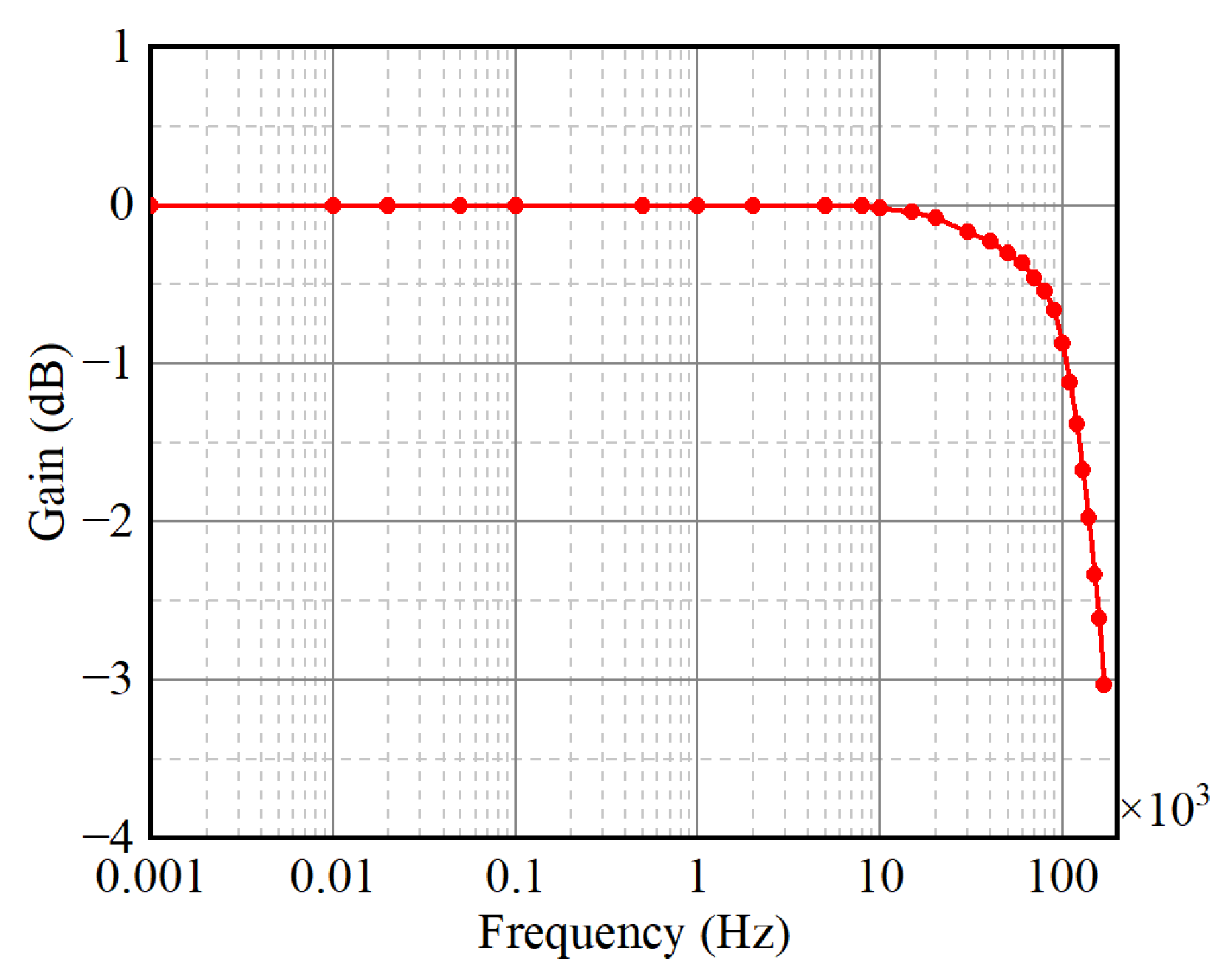
The small-signal bandwidth is measured when the primary current is 5 A. In the experiment, a 0.5 Vrms sinusoid signal is generated by a Rigol DG4102 function waveform generator with a 10 W amplifier. The primary winding with 10 turns wound around the current sensor to achieve an equivalent 5 Arms current is connected to a sampling resistor. The ratio in the form of dB between the voltage of the proposed sensor and the voltage on the sampling resistor is a function of the frequency, as shown in Figure 14. It can be seen that the −1 dB and −3 dB bandwidths of the proposed current sensor are about 100 kHz and 170 kHz, respectively.

Figure 14.
Small-signal bandwidth of the proposed current sensor.
4.3. Output Noise
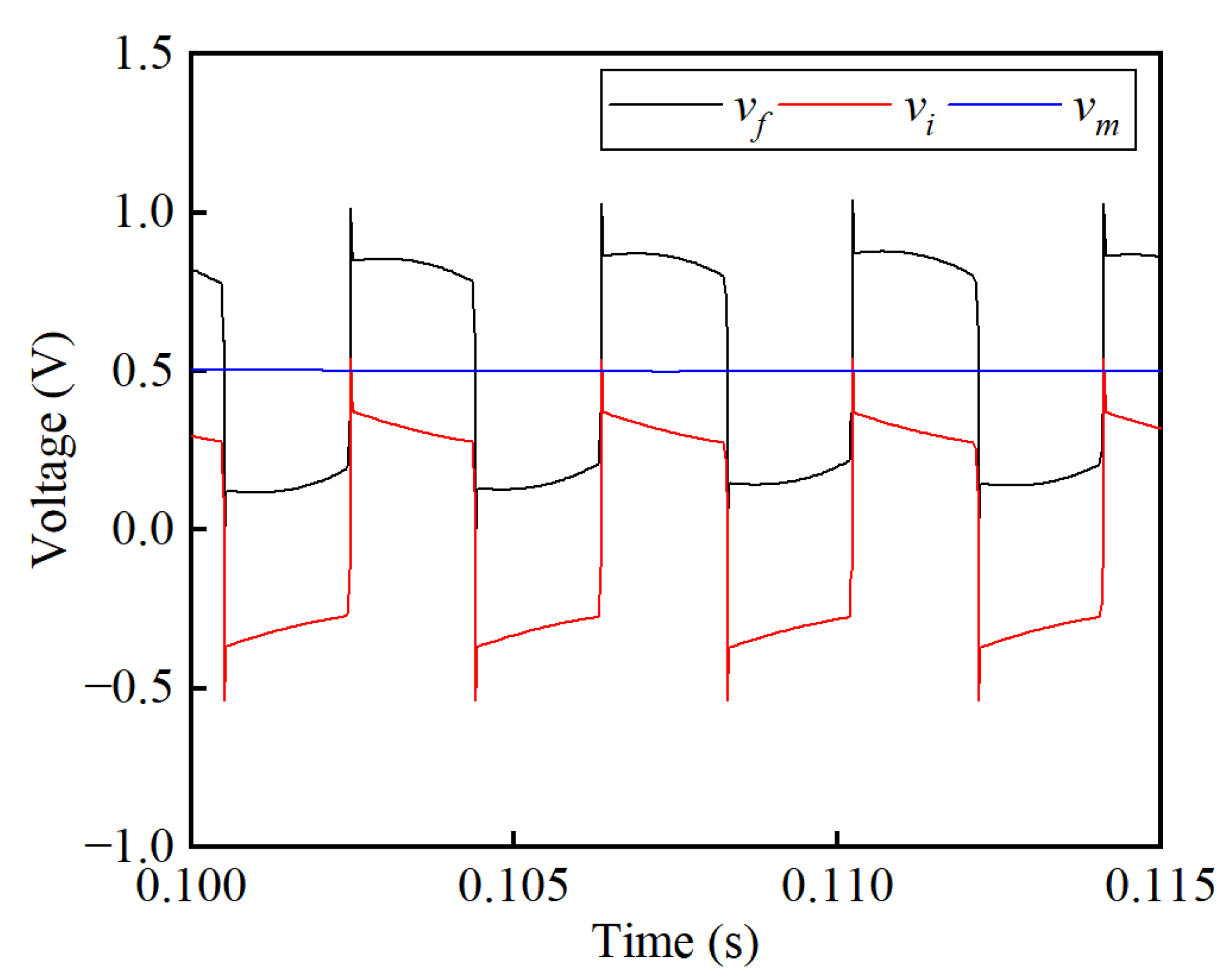
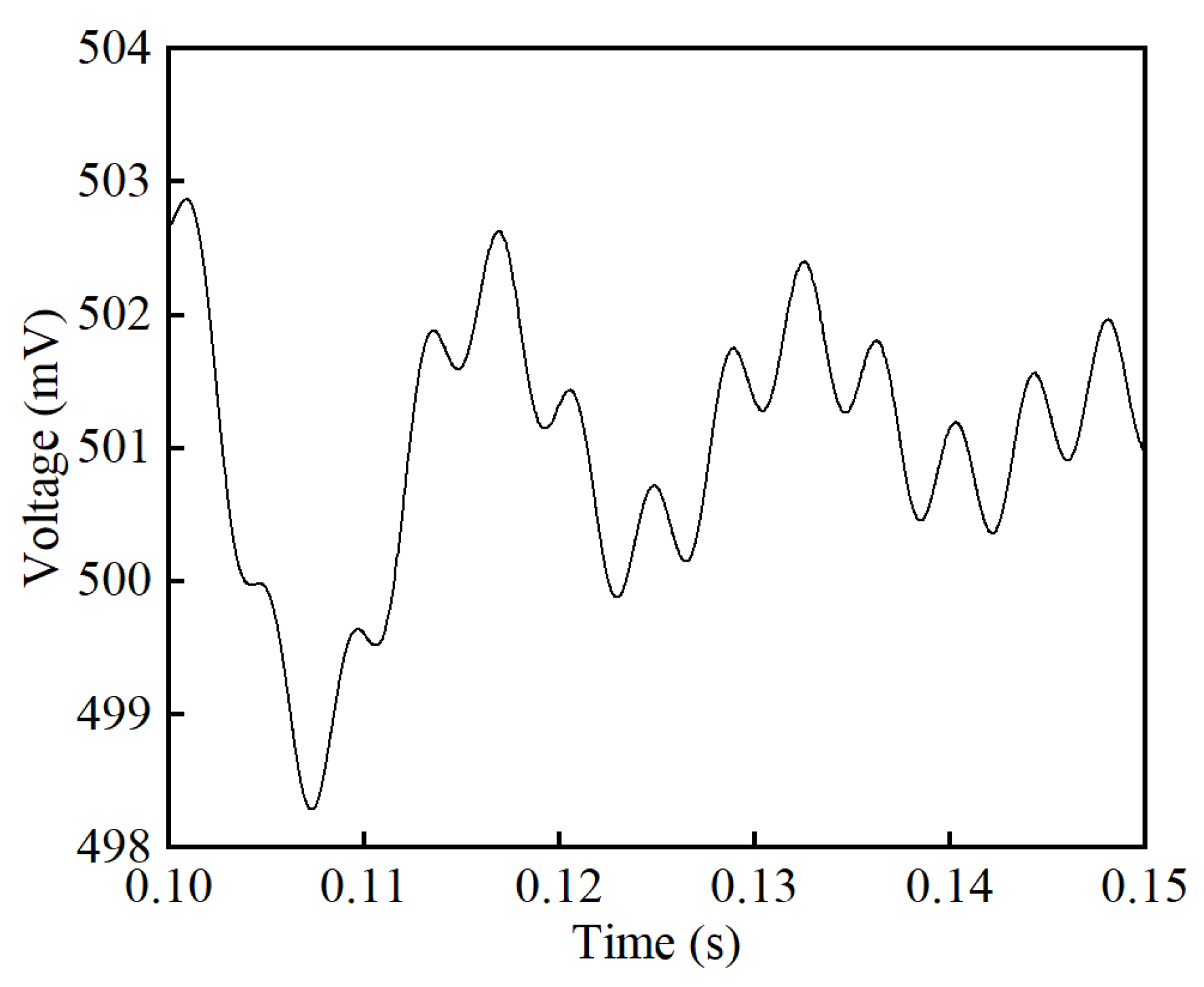
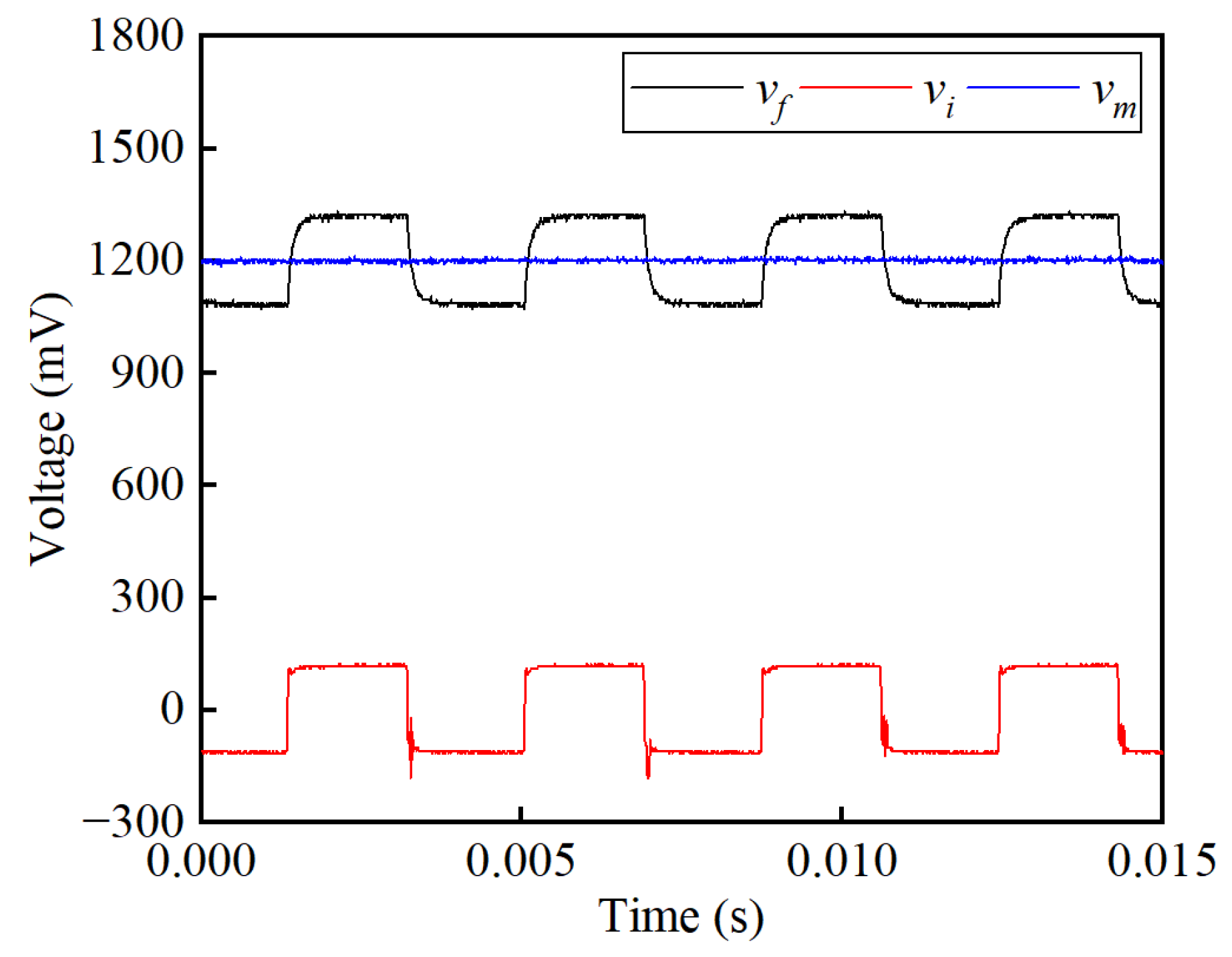
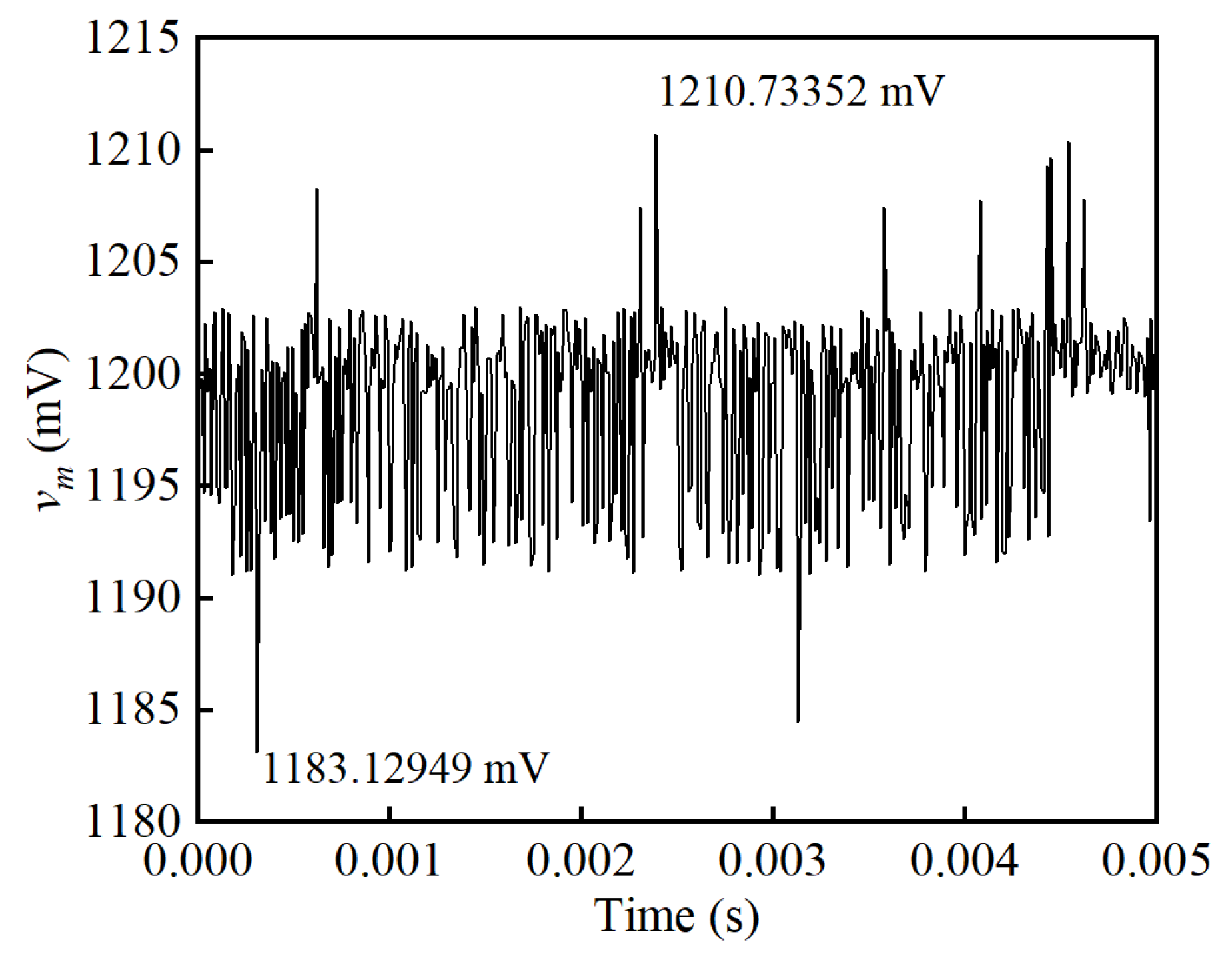
The voltage vf on the potential terminal of the feedback resistor Rf, the voltage vi on the potential terminal of the induction resistor Ri, and the voltage vm on the potential terminal of the output resistor Rm are obtained to investigate the effectiveness of the proposed noise suppression circuit, as shown in Figure 15. A smooth DC waveform of vm is obtained after implementing the subtraction circuit and LPF. Figure 16 shows the enlarged waveform to analyze the residual ripple in the output signal vm when the primary current Ip is set to 600 A. It can be seen that the Max. value is 1210.73 mV, the minimum (Min.) value is 1183.13 mV, and the RMS value is 1199.39 mV. By calculating the power of the signal and its noise, the SNR is obtained as 48.88 dB. In Figure 15, the noise in signal vf is nearly a square wave with a frequency of 270 Hz, which is the same as the self-oscillating frequency. As expected, a good amplitude and phase consistency is achieved between vf and vi. There is a difference in the time constant between the feedback winding Wf and the induction winding Wi, resulting in dynamic deviation in the rise and fall edges. The peak-to-peak value of vf is 253.09 mV and the RMS value is 1202.07 mV, resulting in an SNR of 19.55 dB. Thus, the SNR is improved from 19.55 dB to 48.88 dB, verifying the effectiveness of the noise suppression.

Figure 15.
Noise suppression effect of the proposed sensor when the primary current Ip is set to 600 A.

Figure 16.
Residual ripple in the output signal vm when the primary current Ip is set to 600 A.
4.4. Power-On Repeatability
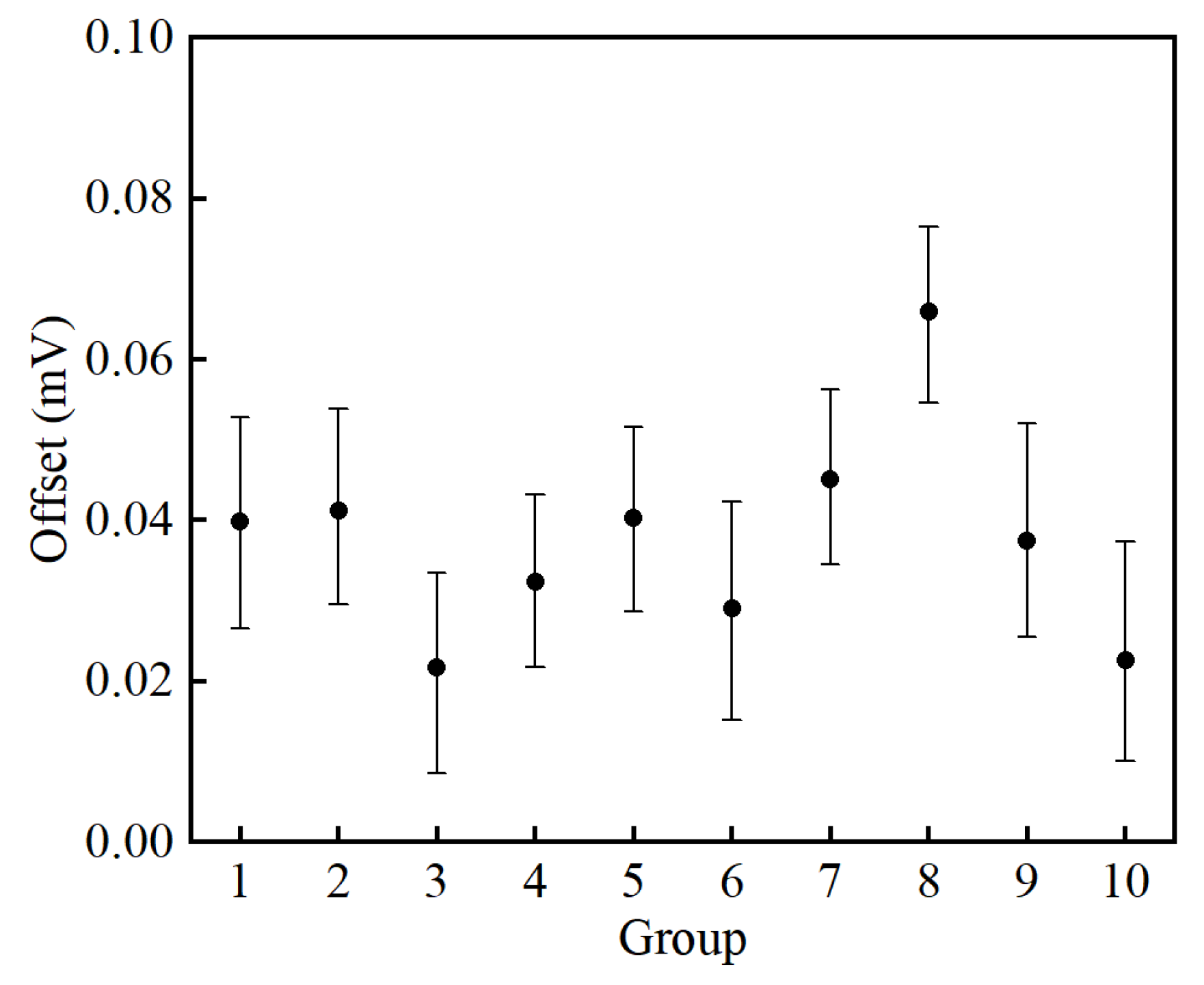
The memory effect is the cause of zero offsets in DC current sensors [21]. The remanence inside the magnetic core leads to a different working point when the sensor is turned on. Moreover, there are energy storage components such as capacitors and inductors, whose discharge can also cause zero offsets in the feedback signal. Ten groups of measurements of the output signal offset have been carried out to evaluate the power-on repeatability of the proposed sensor. The proposed sensor is thoroughly cut off for 30 min before each measurement so that the residual magnetism of the magnetic core and energy storage of the capacitances and inductances can be reduced to zero as much as possible. Then, the sensor is turned on and 100 values of the output signal vm are measured as one group for statistical analysis. In this manner, the offset voltage is measured by a Fluke 289C on the 50 mV range with a resolution of 0.001 mV and an accuracy of 0.05% + 20 to guarantee enough resolution. Results of the signal vm are converted into current values and presented in Figure 17. The relative standard deviation of the ten groups is 11.66 ppm, indicating a rather low memory effect of the proposed sensor.

Figure 17.
Power-on repeatability of the proposed current sensor.
4.5. Comparison Results
To compare the performance benefits of the proposed one-core self-oscillating fluxgate-based sensor with the multi-core structure, another prototype based on a three-core-four-winding structure in the literature [18], noted as sensor B, is designed for MCCB application and fabricated for a contrast test. In order to fairly evaluate the advantages and disadvantages of the two sensors, the magnetic and circuit parameters are designed as similar as possible. We choose the same material models and fabricate the same dimensions for the three cores in sensor B. The turn numbers of the exciting, reversing, and compensating windings are equal to Nex, and the turn number of the feedback winding of Sensor B is equal to Nf. To study the characteristics of the proposed sensor extensively, the dimension difference and the comparison characteristics between the proposed sensor and other representative sensors (sensor B for multi-core self-oscillating fluxgate, Danisense DS400ID for traditional fluxgate with modulation circuit, and LEM LF 505-S for hall-based sensor) are listed in Table 3.
Table 3.
Comparison results between the proposed sensor and other sensors.
Compared to the hall-based sensor, the fluxgate-based sensors have higher accuracy. By comparing the proposed sensor, sensor B, and Danisense DS400ID, it can be seen that the self-oscillating method benefits from great volume reduction compared to the traditional modulation method, leading to a better application prospect of integrated current detection. Due to the less magnetic core and winding, the volume and cost of the proposed sensor are further reduced by 44.4% and 23.6% compared with sensor B, with the multi-core structure, respectively. Despite the relatively simple structure and circuits, the linearity and relative errors are only 0.06 and 0.05 percentage points higher for the proposed sensor compared to sensor B. Since the installation space for each sensor probe in the MCCB is 48 × 48 × 30 mm (length × width × height), the small accuracy loss is acceptable with a great reduction of the volume and cost for distribution system applications. In comparison of the small-signal bandwidth, Danisense DS400ID gains a wider bandwidth due to the much higher excitation frequency. In terms of noise suppression, the proposed sensor unexpectedly achieves a higher SNR under 600 A. According to subsequent investigation, the main reason for the lower SNR in sensor B is the inconsistency in the bi-directional magnetic cores, resulting in an alternating signal with a frequency similar to the exciting current. These data indicate that the higher manufacturing process requirements will also limit the applications of the multi-core fluxgate sensors. Although the power-on repeatability of the proposed sensor has been slightly improved compared to sensor B due to less energy storage electronics, it is still slightly lower than the Danisense product.
5. Conclusions
This paper proposes a new self-oscillating fluxgate-based current sensor with a scheme of one magnetic core and three windings for DC distribution system applications. An example design is carried out for MCCBs with a rated current of 400 A. The characteristics of linearity, small-signal bandwidth, output noise, and power-on repeatability are presented and discussed in this study. The experimental results show that the accuracy of the proposed sensor is 0.15% within the range of 0–600 A. The additional induction winding with the noise suppression circuit has been experimentally verified to improve the SNR from 19.55 dB to 48.88 dB when the primary current is 600 A. Compared with another prototype based on a three-core-four-winding structure, the proposed sensor reduces the volume by 44.4% and the cost by 23.6%, with a relatively simple structure and circuits, while achieving the same level of performance. Further work needs to be carried out to investigate the influence of dynamic electronic performance on induction ripples, the influence of core saturation and thermal effects on high-current detection with a more accurate magnetic core model, and the characteristics in harsh industrial environments.
Author Contributions
Conceptualization, W.C.; data curation, H.C. and L.L.; methodology, W.C. and H.X.; validation, W.C. and H.C.; and writing—original draft, W.C. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Project of Zhejiang Provincial Department of Education under no. Y202044245 and the Key Science and Technology Research Project of Wenzhou under no. ZG2022002.
Data Availability Statement
The data are contained within the article.
Conflicts of Interest
Author Li Li was employed by the company Zhejiang CHINT Electrics Co., Ltd. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| SNR | Singal-to-noise ratio |
| LPF | Low pass filter |
| PI | Proportional-integral |
| PA | Power amplifier |
| DMM | Digital multimeter |
| MCCB | Molded case circuit breaker |
| RMS | Root mean square |
References
- Kebede, A.A.; Kalogiannis, T.; Van Mierlo, J.; Berecibar, M. A Comprehensive Review of Stationary Energy Storage Devices for Large Scale Renewable Energy Sources Grid Integration. Renew. Sustain. Energy Rev. 2022, 159, 112213. [Google Scholar] [CrossRef]
- Li, Y.Z.; Yan, Y.F.; Chen, Y.W.; Zhu, S.P.; Li, X.F. Resistive Onset Determination of Coated Condutors Utilizing a Shunt Current Instead of Voltage Measurement. IEEE Trans. Appl. Supercond. 2025, 35, 4. [Google Scholar] [CrossRef]
- Liu, P.; Wang, W.; Zhou, L.; Zhao, M.C.; Wu, C.H.; He, L.; Liu, H.Y. Development of a Zero-Flux Hall Current Sensor Dedicated for Large-Current Measurement of Superconducting Cable. IEEE Trans. Appl. Supercond. 2025, 35, 5. [Google Scholar] [CrossRef]
- Younis, M.; Abdullah, M.; Dai, S.C.; Iqbal, M.A.; Tang, W.; Sohail, M.T.; Atiq, S.; Chang, H.X.; Zeng, Y.J. Magnetoresistance in 2D Magnetic Materials: From Fundamentals to Applications. Adv. Funct. Mater. 2025, 35, 31. [Google Scholar] [CrossRef]
- Wu, X.; Huang, H.H.; Dou, S.; Peng, L. Research on Magnetically Balanced High-Current TMR Sensor for EAST Poloidal Field Power Supply. IEEE Trans. Magn. 2024, 60, 11. [Google Scholar] [CrossRef]
- Dyankov, G.; Kolev, P.; Eftimov, T.A.; Hikova, E.O.; Kisov, H. Channeled Polarimetry for Magnetic Field/Current Detection. Sensors 2025, 25, 466. [Google Scholar] [CrossRef] [PubMed]
- Garcha, P.; Schaffer, V.; Haroun, B.; Ramaswamy, S.; Wieser, J.; Lang, J.; Chandraksan, A. A Duty-Cycled Integrated-Fluxgate Magnetometer for Current Sensing. IEEE J. Solid-State Circuits 2022, 57, 2741–2751. [Google Scholar] [CrossRef]
- Cao, J.; Zhao, J.; Cheng, S. Research on the Simplified Direct-Current Fluxgate Sensor and its Demodulation. Meas. Sci. Technol. 2019, 30, 075101. [Google Scholar] [CrossRef]
- Ripka, P. Electric Current Sensors: A Review. Meas. Sci. Technol. 2010, 21, 112001. [Google Scholar] [CrossRef]
- Yang, X.; Wen, J.; Chen, M.; Gao, Z.; Xi, L.; Li, Y. Analysis and Design of a Self-Oscillating Bidirectionally Saturated Fluxgate Current Sensor. Measurement 2020, 157, 107687. [Google Scholar] [CrossRef]
- Wei, Y.; Li, C.; Zhao, W.; Xue, M.; Cao, B.; Chu, X.; Ye, C. Electrical Compensation for Magnetization Distortion of Magnetic Fluxgate Current Sensor. IEEE Trans. Instrum. Meas. 2022, 71, 9503409. [Google Scholar] [CrossRef]
- Xiao, X.; Song, H.; Li, H. A High Accuracy AC plus DC Current Transducer for Calibration. Sensors 2022, 22, 2214. [Google Scholar] [CrossRef]
- Ponjavic, M.; Veinovic, S. Low-Power Self-Oscillating Fluxgate Current Sensor Based on Mn-Zn Ferrite Cores. J. Magn. Magn. Mater. 2021, 518, 167368. [Google Scholar] [CrossRef]
- Ding, Z.; Wang, J.; Li, C.; Wang, K.; Shao, H. A Wideband Closed-Loop Residual Current Sensor Based on Self-Oscillating Fluxgate. IEEE Access 2023, 11, 134126–134135. [Google Scholar] [CrossRef]
- Yang, X.; Chen, M.; Jia, Z. Analysis and Design of a Self-Oscillating Quasi-Digital Fluxgate Current Sensor for DC Current Measurement. Rev. Sci. Instrum. 2021, 92, 025001. [Google Scholar] [CrossRef]
- Ponjavic, M.M.; Duric, R.M. Nonlinear Modeling of the Self-Oscillating Fluxgate Current Sensor. IEEE Sens. J. 2007, 7, 1546–1553. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, Z.; Li, Z.; Zhang, Y.; He, Q.; Han, B.; Lu, Y. Self-Oscillating Fluxgate-Based Quasi-Digital Sensor for DC High-Current Measurement. IEEE Trans. Instrum. Meas. 2015, 64, 3555–3563. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, Z.; Li, Z.; He, Q.; Lin, F.; Lu, Y. Design and Characterization of a Low-Cost Self-Oscillating Fluxgate Transducer for Precision Measurement of High-Current. IEEE Sens. J. 2016, 16, 2971–2981. [Google Scholar] [CrossRef]
- Li, J.; Ren, W.; Luo, Y.; Zhang, X.; Liu, X.; Zhang, X. Design of Fluxgate Current Sensor Based on Magnetization Residence Times and Neural Networks. Sensors 2024, 24, 3752. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Y.; Xie, J.; Ding, T.; Han, X. A New Approach for Solving the False Balance of a Closed-Loop Fluxgate Current Transducer. IEEE Trans. Ind. Electron. 2022, 69, 2147–2152. [Google Scholar] [CrossRef]
- Kusters, N.L.; Moore, W.J.M.; Miljanic, P.N. A Current Comparator for the Precision Measurement of D-C Ratios. IEEE Trans. Commun. Electron. 2013, 82, 204–210. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).