


Estimation of Flood Inundation Area Using Soil Moisture Active Passive Fractional Water Data with an LSTM Model



Abstract
Highlights
- High performance of area under the curve (AUC) and confusion-matrix-based evaluation index from an LSTM model.
- Complex terrain and dense vegetation reduce flood detection performance.
- A high accuracy estimation of fractional water (FW) in areas near water bodies.
- Fluctuations in measured FW and producing a false positive (FP) and false negative (FN) detection.
Abstract
1. Introduction
2. The Study Area
3. Materials
3.1. SMAP-L4 Surface Soil Moisture
3.2. SMAP Fractional Water
3.3. Sentinel-1 Water Mask
3.4. ASTER-GDEM
3.5. GFS Precipitation
4. Methods
4.1. Data Pre-Processing
4.2. LSTM Neural Network
4.3. Modeling Process of LSTM
4.4. Validation
5. Results and Discussion
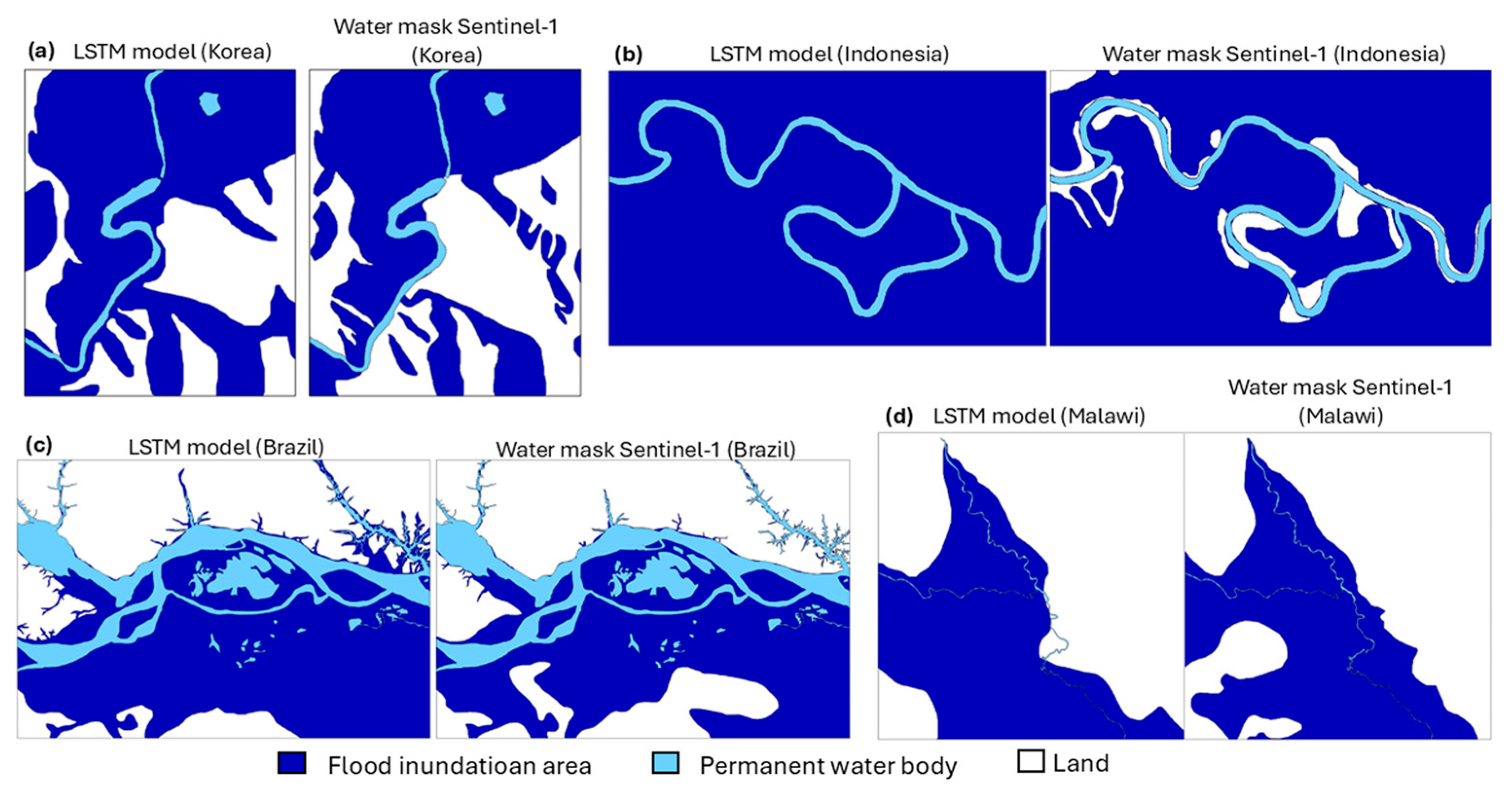
5.1. Comparison of Modeled and Observed Flood Inundation Areas
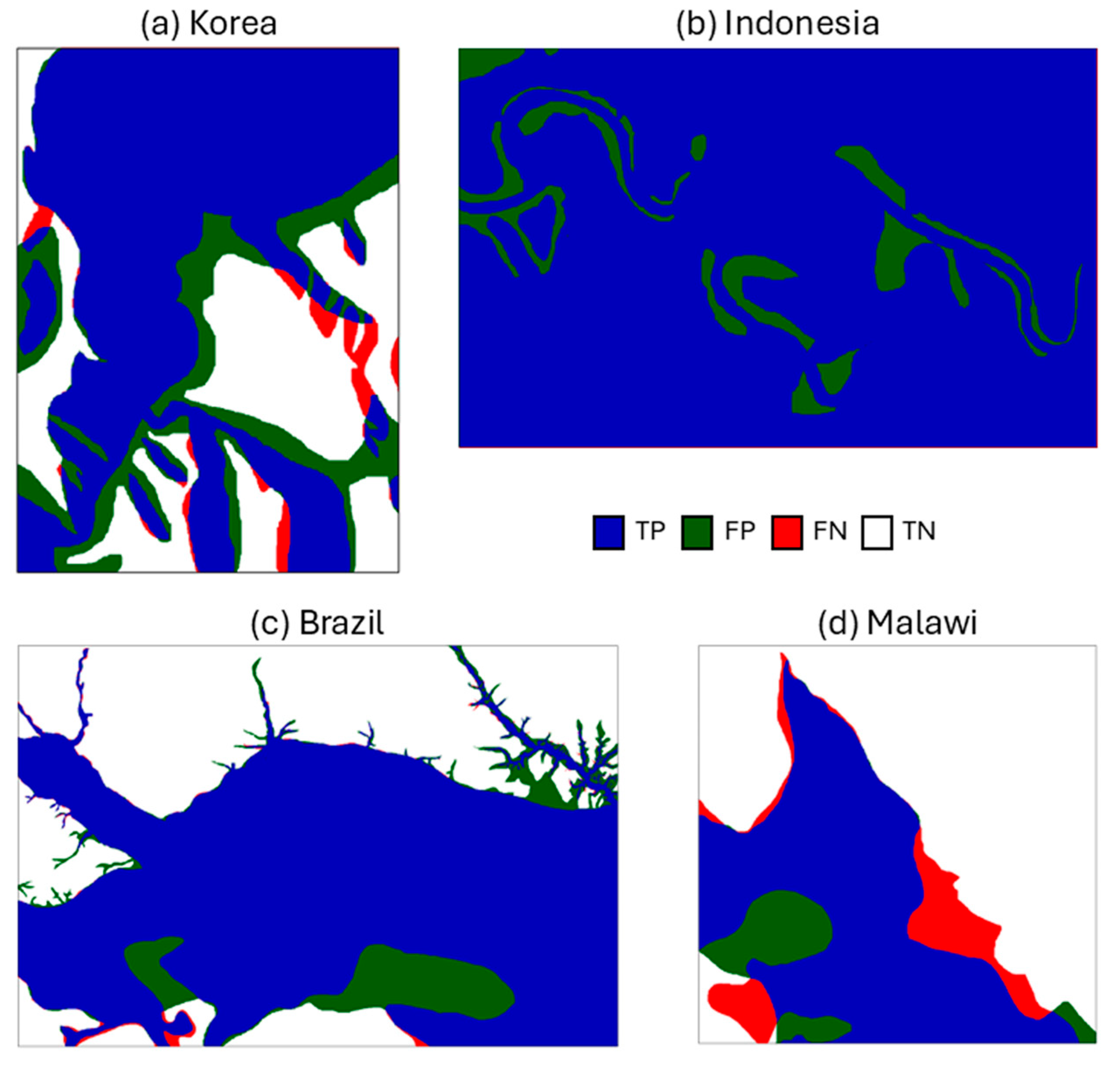
5.2. Validation of Flood Inundation Area
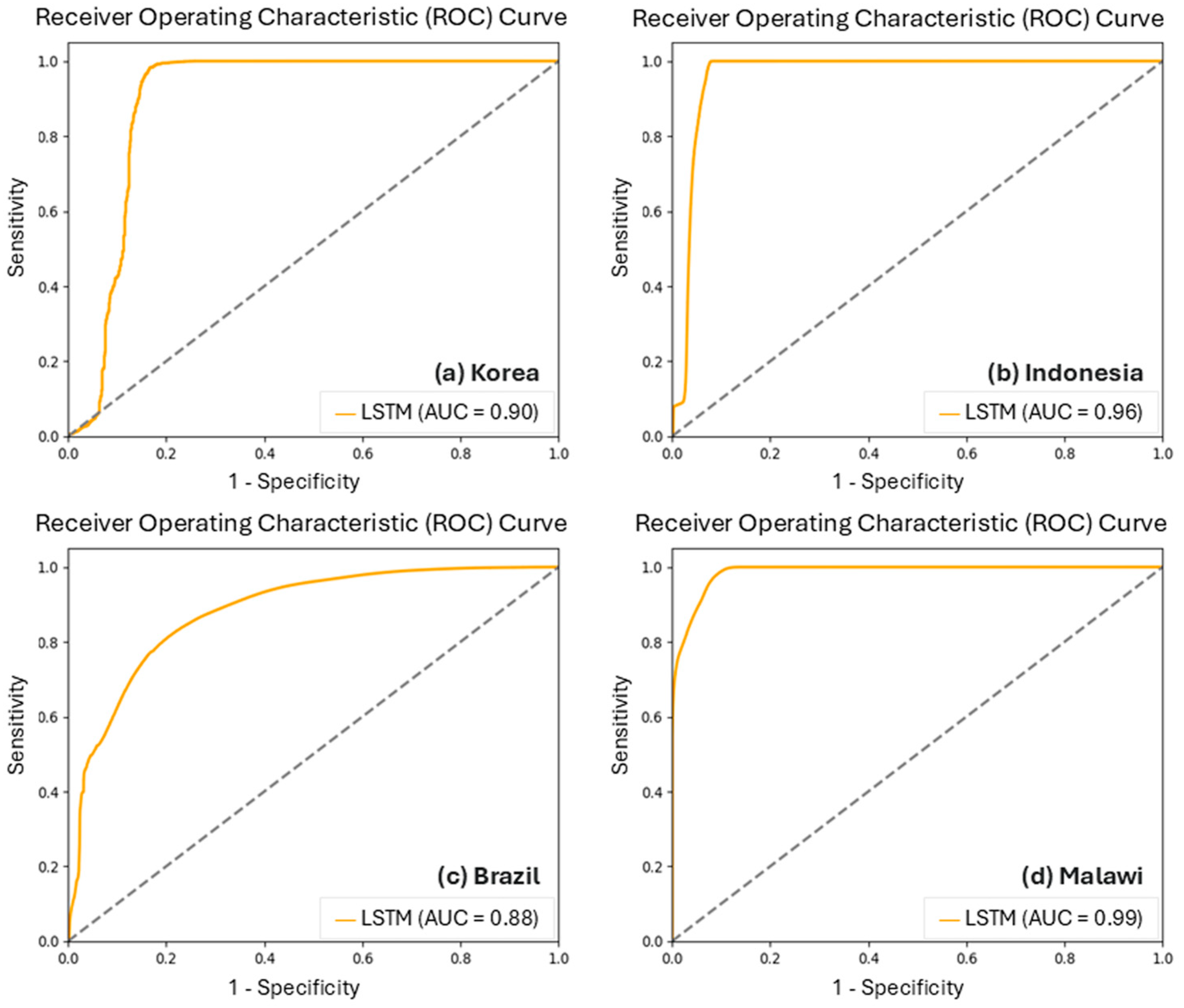
5.3. Model Performance and Uncertainty
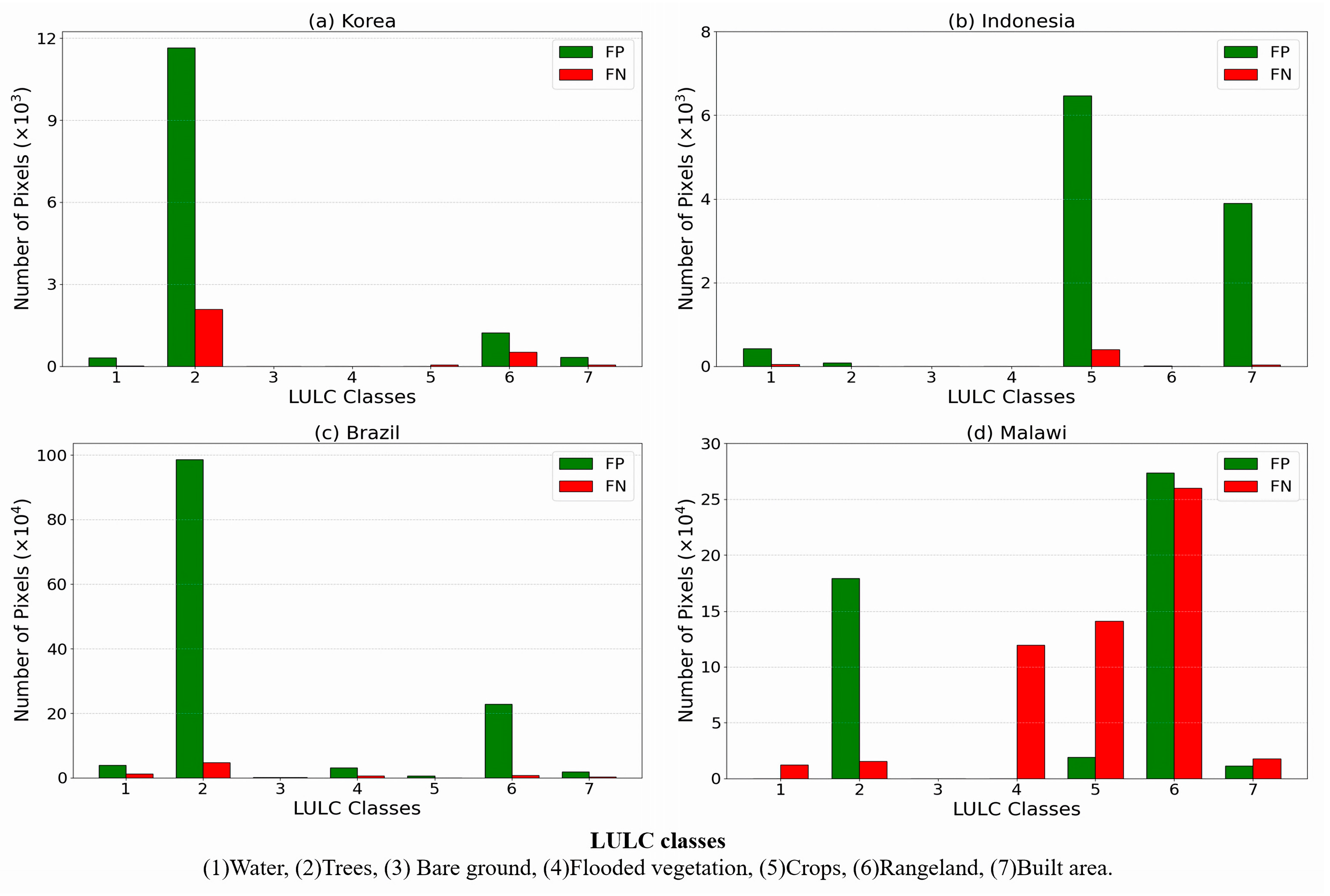
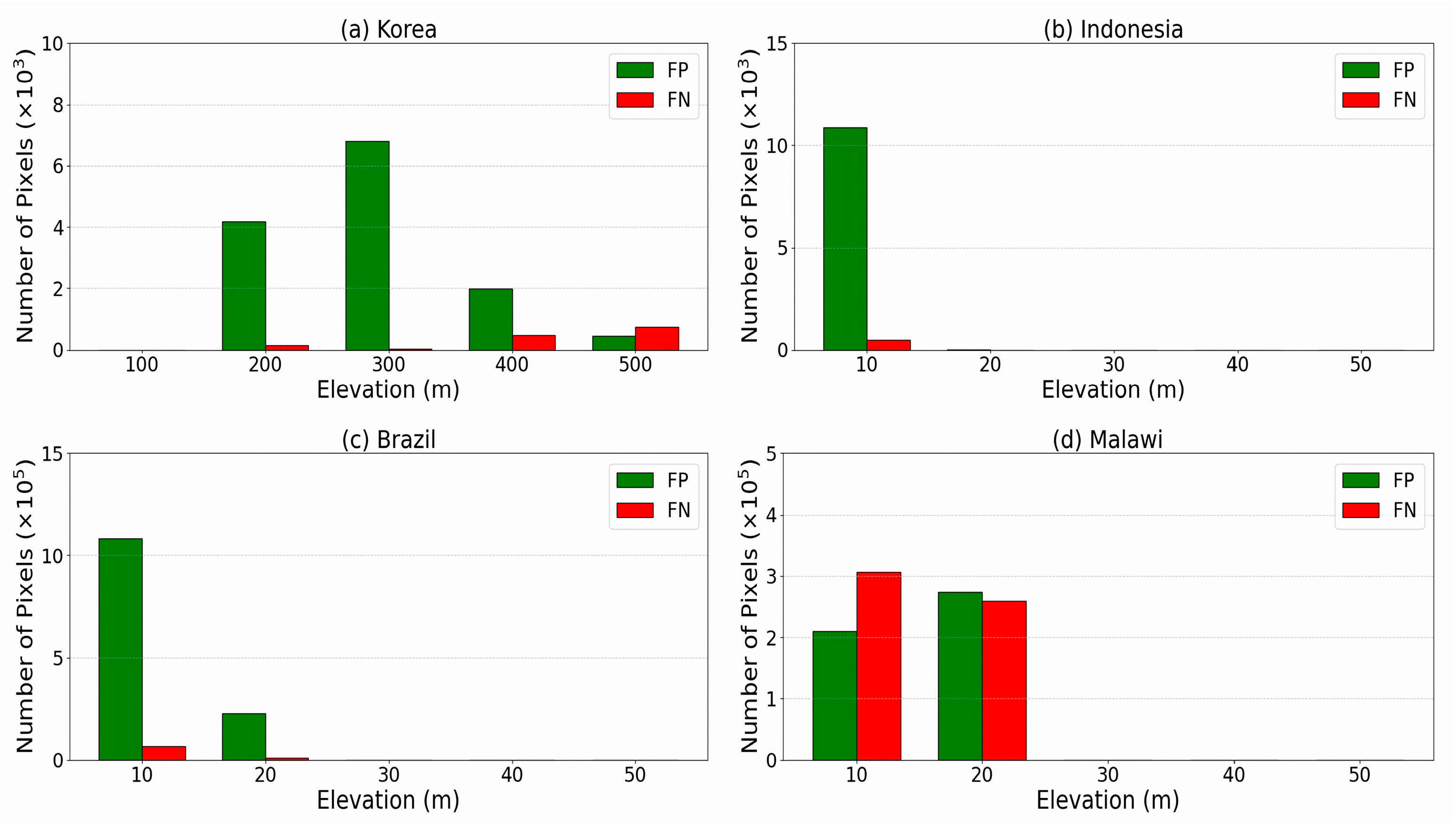
5.4. Elevation and Land Use/Land Cover (LULC) Impact on Flood Inundation Area
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sharif, H.O.; AlJuaidi, F.H.; AlOthmna, A.; AlDousary, I.; Fadda, E.; JamalUddeen, S.; Elhassan, A. Flood hazards in an urbanizing watershed in Riyadh, Saudi Arabia. Geomat. Nat. Hazards Risk 2014, 7, 702–720. [Google Scholar] [CrossRef]
- Lou, Y.; Wang, P.; Li, Y.; Wang, L.; Chen, C.; Li, J.; Hu, T. Management of the designed risk level of urban drainage system in the future: Evidence from haining city, China. J. Environ. Manag. 2024, 351, 119846. [Google Scholar] [CrossRef]
- Adeyi, Q.; Ahmad, M.J.; Adelodun, B.; Odey, G.; Akinsoji, A.H.; Salau, R.A.; Choi, K.S. Developing a hydrological model for evaluating the future flood risks in rural areas. J. Korea Water Resour. Assoc. 2023, 56, 955–967. [Google Scholar] [CrossRef]
- Anggarda, A.A.; Purnaweni, H.; Suwitri, S.; Afrizal, T. Analysis of Flood Disaster Mitigation Policy in Lamongan District. Int. J. Soc. Sci. Bus. 2021, 5, 537–542. [Google Scholar] [CrossRef]
- Espinoza, J.C.; Marengo, J.A.; Schongart, J.; Jimenez, J.C. The new historical flood of 2021 in the Amazon River compared to major floods of the 21st century: Atmospheric features in the context of the intensification of floods. Weather. Clim. Extrem. 2022, 35, 100406. [Google Scholar] [CrossRef]
- Mwalwimba, I.K.; Manda, M.; Ngongondo, C. Flood vulnerability assessment in rural and urban informal settlements: Case study of Karonga District and Lilongwe City in Malawi. Nat. Hazards 2024, 120, 10141–10184. [Google Scholar] [CrossRef]
- Ahmad, D.; Afzal, M. Household vulnerability and resilience in flood hazards from disaster-prone areas of Punjab, Pakistan. Nat. Hazards 2019, 99, 337–354. [Google Scholar] [CrossRef]
- Fang, Z.; Dolan, G.; Sebastian, A.; Bedient, P.B. Case study of flood mitigation and hazard management at the Texas Medical Center in the wake of Tropical Storm Allison 2001. Nat. Hazards Rev. 2014, 15, 05014001. [Google Scholar] [CrossRef]
- Mustafa, H.; Tariq, A.; Shu, H.; Hassan, S.N.; Khan, G.; Brian, J.D.; Almutairi, K.F.; Soufan, W. Integrating multisource data and machine learning for supraglacial lake detection: Implications for environmental management and sustainable development goals in high mountainous regions. J. Environ. Manag. 2024, 370, 122490. [Google Scholar] [CrossRef]
- Zhang, C.; Xiao, X.; Wang, X.; Qin, Y.; Doughty, R.; Yang, X.; Meng, C.; Yao, Y.; Dong, J. Mapping wetlands in Northeast China by using knowledge-based algorithms and microwave (PALSAR-2, Sentinel-1), optical (Sentinel-2, Landsat), and thermal (MODIS) images. J. Environ. Manag. 2024, 349, 119618. [Google Scholar] [CrossRef]
- Li, Z.; Demir, I. U-net-based semantic classification for flood extent extraction using SAR imagery and GEE platform: A case study for 2019 central US flooding. Sci. Total Environ. 2023, 869, 161757. [Google Scholar] [CrossRef] [PubMed]
- Cian, F.; Blasco, J.M.D.; Ivanescu, C. Improving rapid flood impact assessment: An enhanced multi-sensor approach including a new flood mapping method based on Sentinel-2 data. J. Environ. Manag. 2024, 369, 122326. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Ding, J.; Li, G.; Liang, J.; Yu, D.; Aishan, T.; Zhang, F.; Yang, J.; Abulimiti, A.; Liu, J. Dynamic detection of water surface area of Ebinur Lake using multi-source satellite data (Landsat and Sentinel-1A) and its responses to changing environment. Catena 2019, 177, 189–201. [Google Scholar] [CrossRef]
- Geudtner, D.; Torres, R.; Snoeij, P.; Davidson, M.; Rommen, B. Sentinel-1 system capabilities and applications. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 1457–1460. [Google Scholar] [CrossRef]
- Razavi-Termeh, S.V.; Sadeghi-Niaraki, A.; Ali, F.; Choi, S.M. Improving flood-prone areas mapping using geospatial artificial intelligence (GeoAI): A non-parametric algorithm enhanced by math-based metaheuristic algorithms. J. Environ. Manag. 2025, 375, 124238. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Shen, H.; Weng, Q.; Zhang, Y.; Dou, P.; Zhang, L. Cloud and cloud shadow detection for optical satellite imagery: Features, algorithms, validation, and prospects. ISPRS J. Photogramm. Remote Sens. 2022, 188, 89–108. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T. Active microwave soil moisture research. IEEE Trans. Geosci. Remote Sens. 1968, 24, 23–26. [Google Scholar] [CrossRef]
- Singh, G.; Das, N.N.; Colliander, A.; Entekhabi, D.; Yueh, S.H. Impact of SAR-based vegetation attributes on the SMAP high-resolution soil moisture product. Remote Sens. Environ. 2023, 298, 113826. [Google Scholar] [CrossRef]
- Ma, H.; Zeng, J.; Zhang, X.; Peng, J.; Li, X.; Fu, P.; Cosh, M.H.; Letu, H.; Wang, S.; Chen, N.; et al. Surface soil moisture from combined active and passive microwave observations: Integrating ASCAT and SMAP observations based on machine learning approaches. Remote Sens. Environ. 2024, 308, 114197. [Google Scholar] [CrossRef]
- Zeiger, P.; Frappart, F.; Darrozes, J.; Prigent, C.; Jimenez, C. Analysis of CYGNSS coherent reflectivity over land for the characterization of pan-tropical inundation dynamics. Remote Sens. Environ. 2024, 282, 113278. [Google Scholar] [CrossRef]
- Du, J.; Kimball, J.S.; Galantowicz, J.; Kim, S.; Chan, S.K.; Reichle, R.; Jones, L.A.; Watts, J.D. Assessing global surface water inundation dynamics using combined satellite information from SMAP, AMSR2 and Landsat. Remote Sens. Environ. 2018, 213, 1–17. [Google Scholar] [CrossRef]
- Mousavi, M.; Colliander, A.; Miller, J.Z.; Entekhabi, D.; Johnson, J.T.; Shuman, C.A.; Kimball, J.S.; Courville, Z.R. Evaluation of Surface Melt on the Greenland Ice Sheet Using SMAP L-Band Microwave Radiometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 11439. [Google Scholar] [CrossRef]
- Mousavi, M.; Colliander, A.; Miller, J.Z.; Kimball, J.S. A novel approach to map the intensity of surface melting on the Antarctica ice sheet using SMAP L-band microwave radiometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 1724–1743. [Google Scholar] [CrossRef]
- Du, J.; Kimball, J.S.; Sheffield, J.; Pan, M.; Fisher, C.K.; Beck, H.E.; Wood, E.F. Satellite flood inundation assessment and forecast using SMAP and Landsat. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6707–6715. [Google Scholar] [CrossRef] [PubMed]
- Rahman, M.S.; Di, L.; Yu, E.; Lin, L.; Zhang, C.; Tang, J. Rapid flood progress monitoring in cropland with NASA SMAP. Remote Sens. 2019, 11, 191. [Google Scholar] [CrossRef]
- Saha, T.K.; Pal, S.; Talukdar, S.; Debanshi, S.; Khatun, R.; Singha, P.; Mandal, I. How far spatial resolution affects the ensemble machine learning based flood susceptibility prediction in data sparse region. J. Environ. Manag. 2021, 297, 113344. [Google Scholar] [CrossRef]
- Jha, A.K.; Bloch, R.; Lamond, J. Cities and Flooding: A Guide to Integrated Urban Flood Risk Management for the 21st Century; World Bank Publications: Washington, DC, USA, 2012. [Google Scholar]
- Teja, K.N.; Manikanta, V.; Das, J.; Umamahesh, N.V. Enhancing the predictability of flood forecasts by combining Numerical Weather Prediction ensembles with multiple hydrological models. J. Hydrol. 2023, 625, 130176. [Google Scholar] [CrossRef]
- Irwin, K.; Beaulne, D.; Braun, A.; Fotopoulos, G. Fusion of SAR, optical imagery and airborne LiDAR for surface water detection. Remote Sens. 2017, 9, 890. [Google Scholar] [CrossRef]
- Ganjirad, M.; Delavar, M.R. Flood risk mapping using random forest and support vector machine. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, 10, 201–208. [Google Scholar] [CrossRef]
- Kurian, C.; Sudheer, K.P.; Vema, V.K.; Sahoo, D. Effective flood forecasting at higher lead times through hybrid modelling framework. J. Hydrol. 2020, 587, 124945. [Google Scholar] [CrossRef]
- Aamir, M.; Ali, T.; Irfan, M.; Shaf, A.; Azam, M.Z.; Glowacz, A.; Brumercik, F.; Glowacz, W.; Alqhtani, S.; Rahman, S. Natural Disasters Intensity Analysis and Classification Based on Multispectral Images Using Multi-Layered Deep Convolutional Neural Network. Sensors 2021, 21, 2648. [Google Scholar] [CrossRef]
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in vegetation remote sensing. ISPRS J. Photogramm. Remote Sens. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- Mohamadiazar, N.; Ebrahimian, A.; Hosseiny, H. Integrating deep learning, satellite image processing, and spatialtemporal analysis for urban flood prediction. J. Hydrol. 2024, 639, 131508. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning long-term dependencies with gradient descent is difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef] [PubMed]
- Le, X.; Ho, H.V.; Lee, G.; Jung, S. Application of Long Short-Term Memory (LSTM) neural network for flood forecasting. Water 2019, 11, 1387. [Google Scholar] [CrossRef]
- Duygu, M.B.; Akyürek, Z. Using cosmic-ray neutron probes in validating satellite soil moisture products and land surface models. Water 2019, 11, 1362. [Google Scholar] [CrossRef]
- Miao, X.; Wang, Y.; Yang, Y.; Li, H. Estimating Hi-Resolution Soil Moisture Data Using the HP Model Coupled with Landsat-8 and Smap Datasets. In Proceedings of the IGARSS 2018—IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 9106–9109. [Google Scholar] [CrossRef]
- Zheng, W. Algorithm of flood monitoring and analysis based on SMAP data. In Proceedings of the IEEE 8th Joint International Information Technology and Artificial Intelligence Conference, Chongqing, China, 24–26 May 2019; pp. 911–914. [Google Scholar] [CrossRef]
- Filipponi, F. Sentinel-1 GRD Preprocessing Workflow. Proceedings 2019, 18, 11. [Google Scholar] [CrossRef]
- Yan, D.; Wang, K.; Qin, T.; Weng, B.; Wang, H.; Bi, W.; Li, X.; Li, M.; Liu, Z.; Liu, F.; et al. A data set of global river networks and corresponding water resources zones divisions. Sci. Data 2019, 6, 219. [Google Scholar] [CrossRef]
- Pham, H.T.; Marshall, L.; Johnson, F.; Sharma, A. A method for combining SRTM DEM and ASTER GDEM2 to improve topography estimation in regions without reference data. Remote Sens. Environ. 2018, 210, 229–241. [Google Scholar] [CrossRef]
- Yue, H.; Gebremichael, M.; Nourani, V. Performance of the Global Forecast System’s medium-range precipitation forecasts in the Niger river basin using multiple satellite-based products. Hydrol. Earth Syst. Sci. 2022, 26, 167–181. [Google Scholar] [CrossRef]
- Zhou, Z.; Wang, Y.; Xu, C.; Zhang, Y. Bi-Cubic Interpolation Image Scaling Algorithm Based on FPGA Implementation. In Proceedings of the 3rd International Conference on Computer Science, Electronic Information Engineering and Intelligent Control Technology (CEI), Wuhan, China, 15–17 December 2023; pp. 364–369. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, Y.; Peng, L.; Hong, H. Predicting flood susceptibility using LSTM neural networks. J. Hydrol. 2021, 594, 125734. [Google Scholar] [CrossRef]
- Li, Y.; Qi, F.; Wan, Y. Improvements on Bicubic image interpolation. In Proceedings of the IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference, Chengdu, China, 20–22 December 2019; pp. 1316–1320. [Google Scholar] [CrossRef]
- Jhong, Y.; Chen, C.; Jhong, B.; Tsai, C.; Yang, S. Optimization of LSTM parameters for flash flood forecasting using genetic algorithm. Water Resour. Manag. 2024, 38, 1141–1164. [Google Scholar] [CrossRef]
- Malik, H.; Feng, J.; Shao, P.; Abduljabbar, Z.A. Improving flood forecasting using time-distributed CNN-LSTM model: A time-distributed spatiotemporal method. Earth Sci. Inform. 2024, 17, 3455–3474. [Google Scholar] [CrossRef]
- Ma, Z.; Zhang, S.; Liu, Q.; Feng, Y.; Guo, Q.; Zhao, H.; Feng, Y. Using CYGNSS and L-band radiometer observations to retrieve surface water fraction: A case study of the catastrophic flood of 2022 in Pakistan. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–17. [Google Scholar] [CrossRef]
- Tayyab, M.; Hussain, M.; Zhang, J.; Ullah, S.; Tong, Z.; Rahman, Z.U.; Al-Aizari, A.R.; Al-Shaibah, B. Leveraging GIS-based AHP, remote sensing, and machine learning for susceptibility assessment of different flood types in peshawar, Pakistan. J. Environ. Manag. 2024, 371, 123094. [Google Scholar] [CrossRef]
- Khojeh, S.; Ataie-Ashtiani, B.; Hosseini, S.M. Effect of DEM resolution in flood modeling: A case study of Gorganrood River, Northeastern Iran. Nat. Hazards 2022, 112, 2673–2693. [Google Scholar] [CrossRef]
- Duric, U.; Marjanovic, M.; Radic, Z.; Abolmasov, B. Machine learning based landslide assessment of the Belgrade metropolitan area: Pixel resolution effects and a cross-scaling concept. Eng. Geol. 2019, 256, 23–28. [Google Scholar] [CrossRef]
- Chew, C.; Small, E.; Huelsing, H. Flooding and inundation maps using interpolated CYGNSS reflectivity observations. Remote Sens. Environ. 2023, 293, 113598. [Google Scholar] [CrossRef]
- Avand, M.; Kuriqi, A.; Khazaei, M.; Ghorbanzadeh, O. DEM resolution effects on machine learning performance for flood probability mapping. J. Hydro-Environ. Res. 2022, 40, 1–16. [Google Scholar] [CrossRef]
- Talchabhadel, R.; Nakagawa, H.; Kawaike, K.; Yamanoi, K.; Thapa, B.R. Assessment of vertical accuracy of open source 30m resolution space-borne digital elevation models. Geomat. Nat. Hazards Risk 2021, 12, 939–960. [Google Scholar] [CrossRef]
- Savage, J.T.S.; Pianosi, F.; Bates, P.; Freer, J.; Wagener, T. Quantifying the importance of spatial resolution and other factors through global sensitivity analysis of a flood inundation model. Water Resour. Res. 2016, 52, 9146–9163. [Google Scholar] [CrossRef]
- Yan, L.; Feng, J.; Hang, T. Small watershed stream-flow forecasting based on LSTM. In Proceedings of the 13th International Conference on Ubiquitous Information Management and Communication, Phuket, Thailand, 4–6 January 2019; pp. 1006–1014. [Google Scholar] [CrossRef]
- Widya, L.K.; Rezaie, F.; Lee, W.; Lee, C.W.; Nurwatik, N.; Lee, S. Flood susceptibility mapping of Cheongju, South Korea based on the integration of environmental factors using various machine learning approaches. J. Environ. Manag. 2024, 364, 121291. [Google Scholar] [CrossRef]
- Janizadeh, S.; Pal, S.C.; Saha, A.; Chowdhuri, I.; Ahmadi, K.; Mirzaei, S.; Mosavi, A.H.; Tiefenbacher, J.P. Mapping the spatial and temporal variability of flood hazard affected by climate and land-use changes in the future. J. Environ. Manag. 2021, 298, 113551. [Google Scholar] [CrossRef] [PubMed]
- Zhou, L.; Liu, L. Enhancing dynamic flood risk assessment and zoning using a coupled hydrological-hydrodynamic model and spatiotemporal information weighting method. J. Environ. Manag. 2024, 366, 121831. [Google Scholar] [CrossRef] [PubMed]
- Roy, P.; Pal, S.C.; Chakrabortty, R.; Chodwuri, I.; Malik, S.; Das, B. Threats of climate and land use change on future flood susceptibility. J. Clean. Prod. 2020, 272, 122757. [Google Scholar] [CrossRef]
- Hu, S.; Fan, Y.; Zhang, T. Assessing the effect of land use change on surface runoff in a rapidly urbanized city: A case study of the central area of Beijing. Land 2020, 9, 17. [Google Scholar] [CrossRef]
- Asinya, E.A.; Alam, M.J.B. Flood risk in rivers: Climate driven or morphological adjustment. Earth Syst. Environ. 2021, 5, 861–871. [Google Scholar] [CrossRef]
- Pinheiro, M.R.; Neto, J.P.Q. From the semiarid landscapes of southwestern USA to the wet tropical zone of southeastern Brazil: Reflections on the development of cuestas, pediments, and talus. Earth-Sci. Rev. 2017, 172, 27–42. [Google Scholar] [CrossRef]
- Entekhabi, D.; Konings, A.; Piles, M.; Das, N. Smap-based retrieval of vegetation opacity and albedo. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 2554–2556. [Google Scholar] [CrossRef]
- Kugler, Z.; Nghiem, S.V.; Brakenridge, G.R. SMAP Passive Microwave Radiometer for Global River Flow Monitoring. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5300514. [Google Scholar] [CrossRef]
- Zhang, B.; Wdowinski, S.; Gann, D.; Hong, S.H.; Sah, J. Spatiotemporal variations of wetland backscatter: The role of water depth and vegetation characteristics in Sentinel-1 dual-polarization SAR observations. Remote Sens. Environ. 2022, 270, 112864. [Google Scholar] [CrossRef]
- Hess, L.L.; Melack, J.M.; Novo, E.M.; Barbosa, C.C.; Gastil, M. Dual-season mapping of wetland inundation and vegetation for the central Amazon basin. Remote Sens. Environ. 2003, 87, 404–428. [Google Scholar] [CrossRef]
- Zeng, J.; Shi, P.; Chen, K.S.; Ma, H.; Bi, H.; Cui, C. On the Relationship Between Radar Backscatter and Radiometer Brightness Temperature From SMAP. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4406116. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Area | Width × Height | Area Extent | Day+0 | Day+3 |
|---|---|---|---|---|
| Korea | 5007 × 4474 | 36.01 to 37.26 N, 127.26 to 128.65 E | 15 July 2023 | 18 July 2023 |
| Indonesia | 2700 × 4474 | −7.96 to −6.91 S, 111.75 to 112.50 E | 27 February 2021 | 2 March 2021 |
| Brazil | 4500 × 4500 | −3.75 to −2.50 S, −60.50 to −59.25 W | 29 April 2021 | 2 May 2021 |
| Malawi | 4500 × 4500 | −16.75 to −15.50 S, 34.20 to 35.45 E | 23 January 2022 | 26 January 2022 |
| Study Area | Accuracy | Precision | Recall | IoU | F1 Score |
|---|---|---|---|---|---|
| Korea | 0.75 | 0.81 | 0.91 | 0.75 | 0.86 |
| Indonesia | 0.91 | 0.92 | 0.99 | 0.91 | 0.95 |
| Brazil | 0.88 | 0.89 | 0.99 | 0.88 | 0.94 |
| Malawi | 0.74 | 0.86 | 0.84 | 0.74 | 0.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Febrian, R.D.; Kim, W.; Lee, Y.; Kim, J.; Choi, M. Estimation of Flood Inundation Area Using Soil Moisture Active Passive Fractional Water Data with an LSTM Model. Sensors 2025, 25, 2503. https://doi.org/10.3390/s25082503
Febrian RD, Kim W, Lee Y, Kim J, Choi M. Estimation of Flood Inundation Area Using Soil Moisture Active Passive Fractional Water Data with an LSTM Model. Sensors. 2025; 25(8):2503. https://doi.org/10.3390/s25082503
Chicago/Turabian StyleFebrian, Rekzi D., Wanyub Kim, Yangwon Lee, Jinsoo Kim, and Minha Choi. 2025. "Estimation of Flood Inundation Area Using Soil Moisture Active Passive Fractional Water Data with an LSTM Model" Sensors 25, no. 8: 2503. https://doi.org/10.3390/s25082503
APA StyleFebrian, R. D., Kim, W., Lee, Y., Kim, J., & Choi, M. (2025). Estimation of Flood Inundation Area Using Soil Moisture Active Passive Fractional Water Data with an LSTM Model. Sensors, 25(8), 2503. https://doi.org/10.3390/s25082503