
Rotational Triboelectric Nanogenerator with Machine Learning for Monitoring Speed

 , , ,
, , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
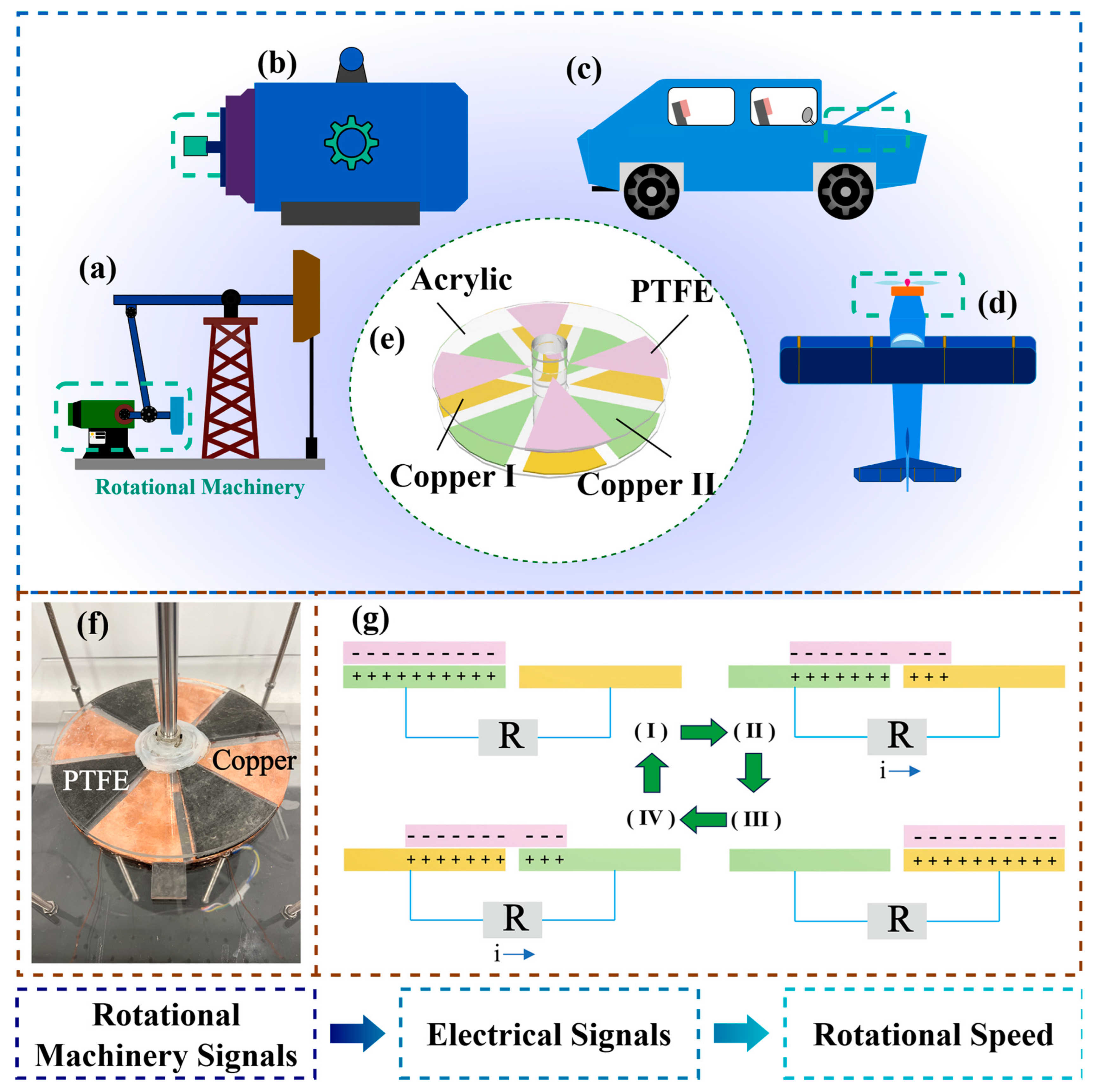
2. Model and Power Generation Principle
3. Results and Discussion
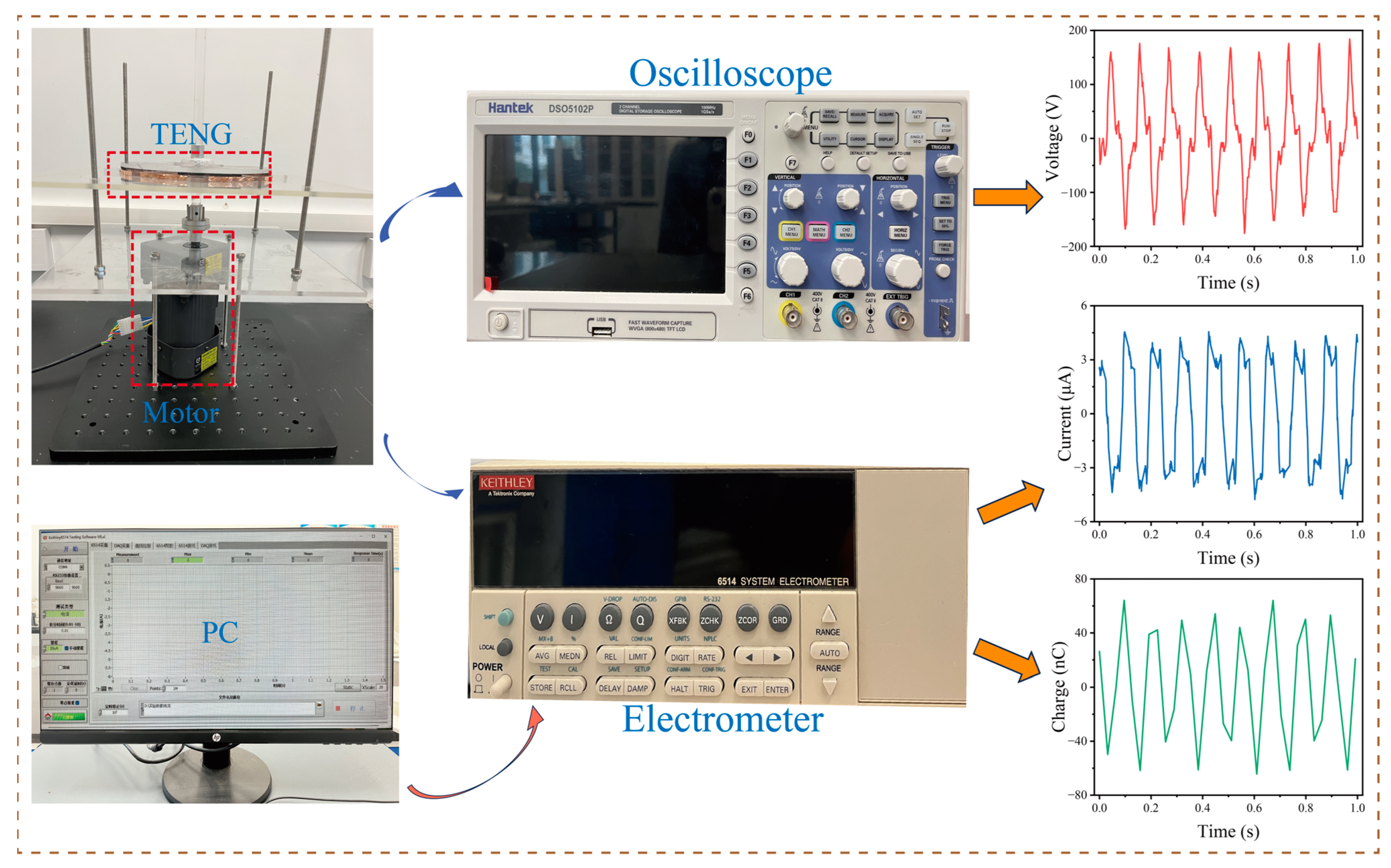
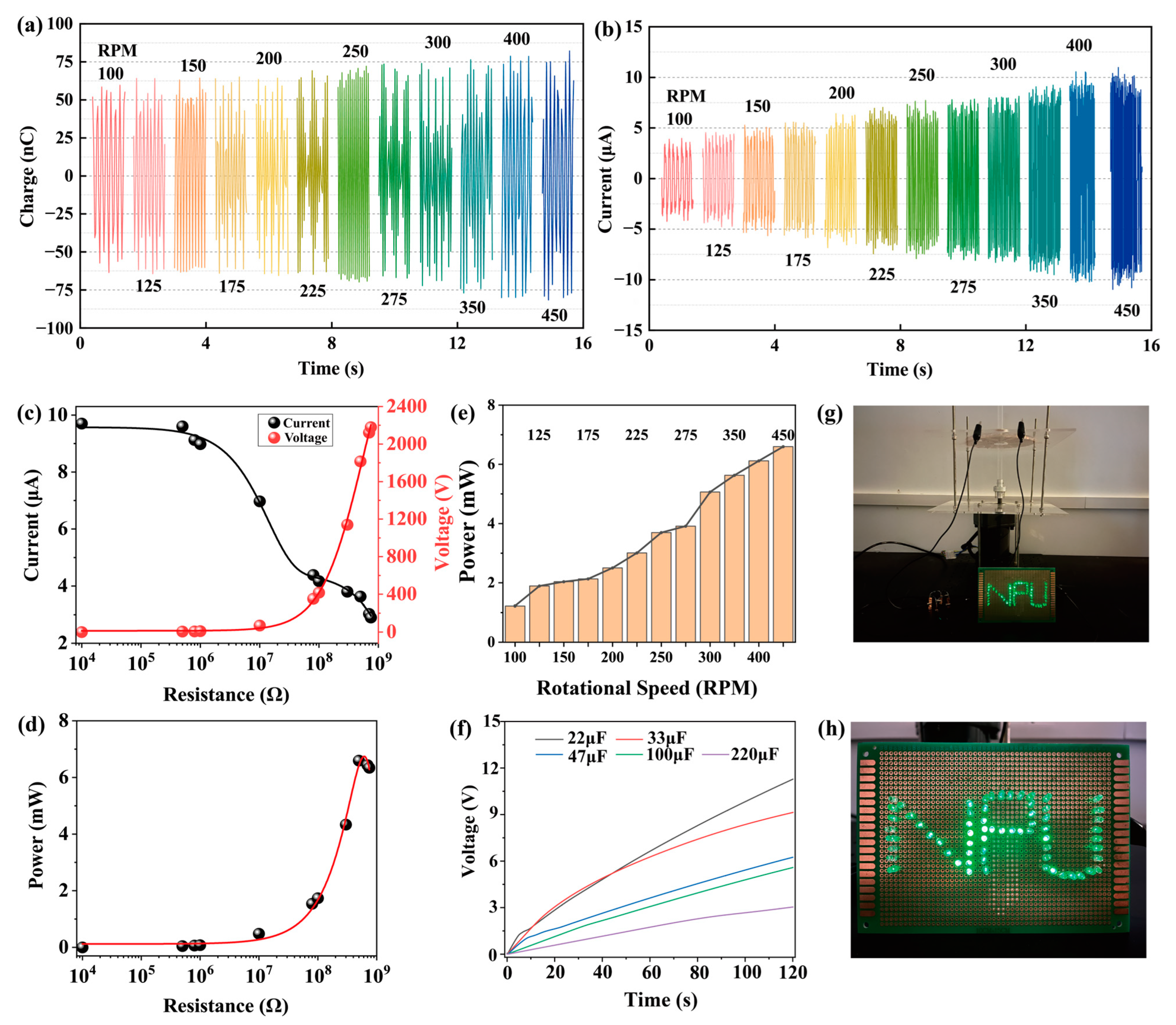
3.1. Electrical Output Performance and Early Warning
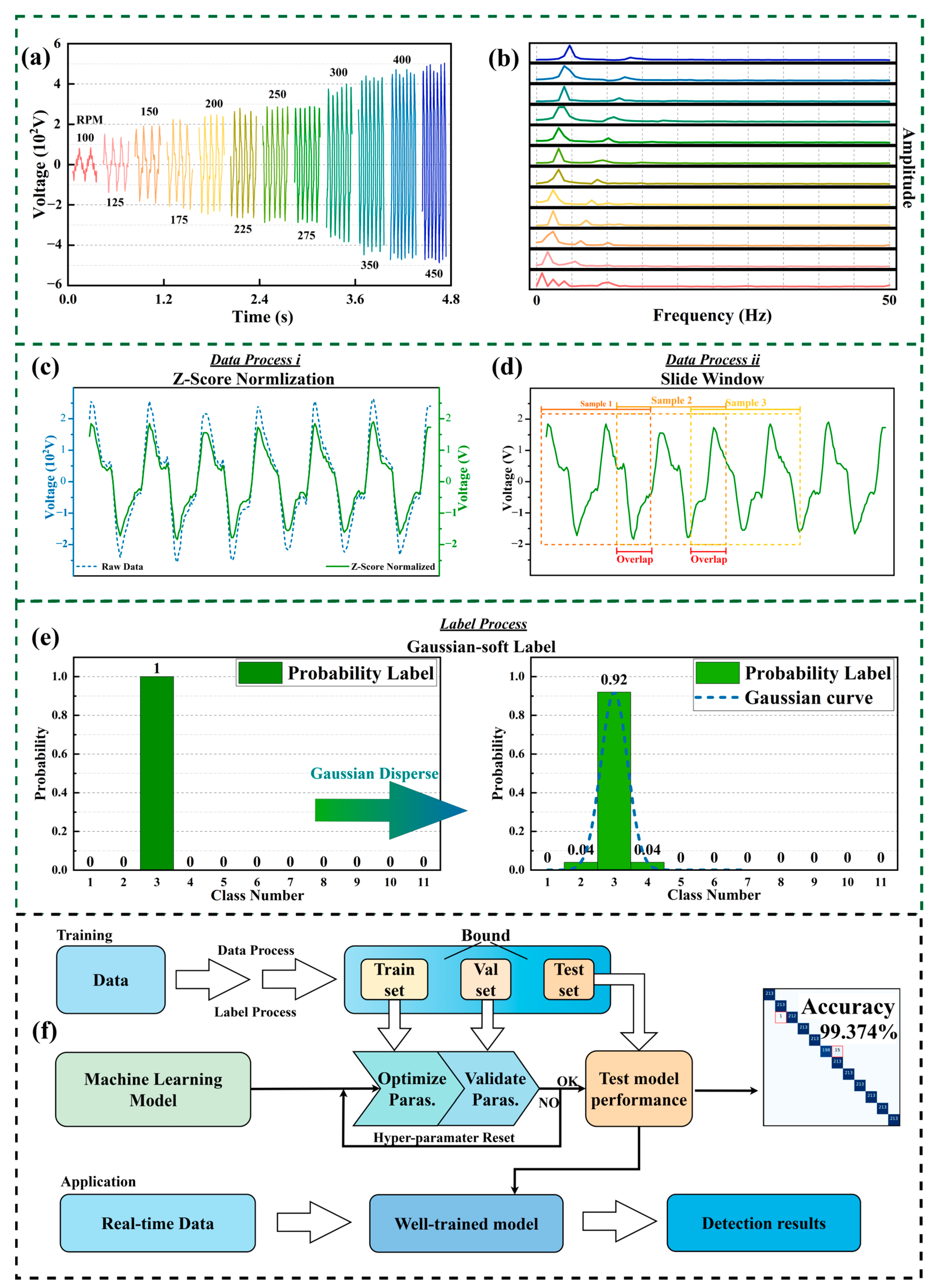
3.2. Framework for Algorithms in Machine Learning
- (i)
- Data collection and processing: Two approaches were used to input the voltage signal data collected by the TENG. One approach was to completely input the original collected signal. The other approach was to input the signal after processing using the z-score normalization method. This can avoid the problem of the prediction results being affected by the presence of outliers in the collected voltage signal.
- (ii)
- Offline training of the machine: First, the sample set is divided into three parts, namely a training set, validation set and test set. They are used to train the machine learning model and predict the TENG speed, respectively. Then, based on the sample set, the back propagation algorithm is used to optimize the training machine algorithm model.
- (iii)
- Online prediction of the TENG: Based on the optimal machine learning algorithm model trained in step (ii), the processed real-time voltage signal can be used as input to perform online prediction of the real-time speed of the TENG. Finally, the machine can output the speed of the TENG at this moment to determine its status.
3.3. Machine Learning Monitoring Rotational Speed
4. Conclusions
5. Details of the Experiment
5.1. Rotating TENG
5.2. Training of Machine Learning Models
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, T.; Xu, H.; Tang, J.; Zhou, S. Exploring nonlinear degradation benefit of bio-inspired oscillator for engineering applications. Appl. Math. Model. 2023, 119, 736–762. [Google Scholar] [CrossRef]
- Peng, Y.; Long, Z.; Liang, S.; Zhong, T.; Chen, M.; Xing, L.; Xue, X. A battery-free music-driven humidity sensor for intelligent wearable sensing system in smart diaper. Smart Mater. Struct. 2023, 32, 025016. [Google Scholar] [CrossRef]
- Xu, J.; Wang, Y.; Li, H.; Xia, B.; Cheng, T. A triangular electrode triboelectric nanogenerator for monitoring the speed and direction of downhole motors. Nano Energy 2023, 113, 108579. [Google Scholar] [CrossRef]
- Jantunen, E. A summary of methods applied to tool condition monitoring in drilling. Int. J. Mach. Tools Manuf. 2002, 42, 997–1010. [Google Scholar] [CrossRef]
- Goyal, D.; Pabla, B.S. The vibration monitoring methods and signal processing techniques for structural health monitoring: A review. Arch. Comput. Methods Eng. 2016, 23, 585–594. [Google Scholar] [CrossRef]
- Vrignat, P.; Kratz, F.; Avila, M. Sustainable manufacturing, maintenance policies, prognostics and health management: A literature review. Reliab. Eng. Syst. Saf. 2022, 218, 108140. [Google Scholar] [CrossRef]
- Kandavalli, S.R.; Khan, A.M.; Iqbal, A.; Jamil, M.; Abbas, S.; Laghari, R.A.; Cheok, Q. Application of sophisticated sensors to advance the monitoring of machining processes: Analysis and holistic review. Int. J. Adv. Manuf. Technol. 2023, 125, 989–1014. [Google Scholar] [CrossRef]
- Yildirim, M.T.; Kurt, B. Aircraft gas turbine engine health monitoring system by real flight data. Int. J. Aerosp. Eng. 2018, 2018, 9570873. [Google Scholar] [CrossRef]
- Long, Z.; Bai, M.; Ren, M.; Liu, J.; Yu, D. Fault detection and isolation of aeroengine combustion chamber based on unscented Kalman filter method fusing artificial neural network. Energy 2023, 272, 127068. [Google Scholar] [CrossRef]
- Esonye, C.; Onukwuli, O.D.; Ofoefule, A.U.; Ogah, E.O. Multi-input multi-output (MIMO) ANN and Nelder-Mead’s simplex based modeling of engine performance and combustion emission characteristics of biodiesel-diesel blend in CI diesel engine. Appl. Therm. Eng. 2019, 151, 100–114. [Google Scholar] [CrossRef]
- Han, J.; Vahidi, A.; Sciarretta, A. Fundamentals of energy efficient driving for combustion engine and electric vehicles: An optimal control perspective. Automatica 2019, 103, 558–572. [Google Scholar] [CrossRef]
- Wang, Z.L. Triboelectric nanogenerators as new energy technology for self-powered systems and as active mechanical and chemical sensors. ACS Nano 2013, 7, 9533–9557. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.; Xie, J.; Huang, Z.; Liu, J.; Luo, H.; Jing, X. Bio-inspired vibration isolator with triboelectric nanogenerator for self-powered monitoring. Mech. Syst. Signal Process. 2025, 223, 111854. [Google Scholar] [CrossRef]
- Wu, C.; Wang, A.C.; Ding, W.; Guo, H.; Wang, Z.L. Triboelectric nanogenerator: A foundation of the energy for the new era. Adv. Energy Mater. 2019, 9, 1802906. [Google Scholar] [CrossRef]
- Zhang, P.; Ma, Y.; Liu, B.; Zhang, H. Enhanced performance triboelectric nanogenerator based on mullite/PVA composites for self-driven sensing and smart home control. Smart Mater. Struct. 2024, 33, 035003. [Google Scholar] [CrossRef]
- Duan, Z.; Cai, F.; Chen, Y.; Wang, Y.; Zhu, J.; Fan, M.; Zhao, P.; Zhou, X.; Zhai, J. Advanced Applications of Porous Materials in Triboelectric Nanogenerator Self-Powered Sensors. Sensors 2024, 24, 3812. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.; Zhou, S.; Litak, G.; Jing, X. Recent advances in correlation and integration between vibration control, energy harvesting and monitoring. Nonlinear Dyn. 2023, 111, 20525–20562. [Google Scholar] [CrossRef]
- Xia, K.; Xu, Z. Double-piezoelectric-layer-enhanced triboelectric nanogenerator for bio-mechanical energy harvesting and hot airflow monitoring. Smart Mater. Struct. 2020, 29, 095016. [Google Scholar] [CrossRef]
- Fu, H.; Mei, X.; Yurchenko, D.; Zhou, S.; Theodossiades, S.; Nakano, K.; Yeatman, E.M. Rotational energy harvesting for self-powered sensing. Joule 2021, 5, 1074–1118. [Google Scholar] [CrossRef]
- Tan, D.; Zhou, J.; Wang, K.; Ouyang, H.; Zhao, H.; Xu, D. Sliding-impact bistable triboelectric nanogenerator for enhancing energy harvesting from low-frequency intrawell oscillation. Mech. Syst. Signal Process. 2023, 184, 109731. [Google Scholar] [CrossRef]
- Liang, X.; Liu, S.; Lin, S.; Yang, H.; Jiang, T.; Wang, Z.L. Liquid-solid triboelectric nanogenerator arrays based on dynamic electric-double-layer for harvesting water wave energy. Adv. Energy Mater. 2023, 13, 2300571. [Google Scholar] [CrossRef]
- Cammarata, A.; Damte, J.Y.; Polcar, T. First-principles guidelines to select promising van der Waals materials for hybrid photovoltaic-triboelectric nanogenerators. Nanoscale 2024, 16, 16582–16592. [Google Scholar] [CrossRef]
- Luo, H.; Liu, J.; Yang, T.; Zhang, Y.; Cao, Q. Dipteran flight-inspired bistable triboelectric nanogenerator for harvesting low frequency vibration. Nano Energy 2022, 103, 107755. [Google Scholar] [CrossRef]
- Yang, Y.; Luo, R.; Chao, S.; Xue, J.; Jiang, D.; Feng, Y.H.; Guo, X.D.; Luo, D.; Zhang, J.; Li, Z.; et al. Improved pharmacodynamics of epidermal growth factor via microneedles-based self-powered transcutaneous electrical stimulation. Nat. Commun. 2022, 13, 6908. [Google Scholar] [CrossRef]
- Guo, H.; Chen, J.; Wang, L.; Wang, A.C.; Li, Y.; An, C.; He, J.H.; Hu, C.; Hsiao, V.K.; Wang, Z.L. A highly efficient triboelectric negative air ion generator. Nat. Sustain. 2021, 4, 147–153. [Google Scholar] [CrossRef]
- Li, X.; Cao, Y.; Yu, X.; Xu, Y.; Yang, Y.; Liu, S.; Cheng, T.; Wang, Z.L. Breeze-driven triboelectric nanogenerator for wind energy harvesting and application in smart agriculture. Appl. Energy 2022, 306, 117977. [Google Scholar] [CrossRef]
- Zhou, Y.; Shen, M.; Cui, X.; Zhang, Y.; Wang, Z.; Li, Z.; You, Z. Triboelectric nanogenerator based self-powered sensor for artificial intelligence. Nano Energy 2021, 84, 105887. [Google Scholar] [CrossRef]
- Zheng, Q.; Xin, L.; Zhang, Q.; Shen, F.; Lu, X.; Cao, C.; Xin, C.; Zhao, Y.; Liu, H.; Peng, Y.; et al. Leech-Inspired Amphibious Soft Robot Driven by High-Voltage Triboelectricity. Adv. Mater. 2025, 37, 2417380. [Google Scholar] [CrossRef]
- Silva, T.C.; Zhao, L. Machine Learning in Complex Networks; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Zhang, C.; Jiang, J.; Qu, S.X.; Lai, Y.C. Predicting phase and sensing phase coherence in chaotic systems with machine learning. Chaos 2020, 30, 083114. [Google Scholar] [CrossRef]
- Wang, X.; Wang, D.; Li, F.; Zhang, Y.; Xu, Z.; Wang, T.; Fu, G.; Lu, C. Self-learning vibration absorber with negative electromagnetic stiffness for variable vibration. Int. J. Mech. Sci. 2023, 248, 108225. [Google Scholar] [CrossRef]
- Popescu, M.C.; Balas, V.E.; Perescu-Popescu, L.; Mastorakis, N. Multilayer perceptron and neural networks. WSEAS Trans. Circuits Syst. 2009, 8, 579–588. [Google Scholar]
- Zhang, J.; Li, C.; Yin, Y.; Zhang, J.; Grzegorzek, M. Applications of artificial neural networks in microorganism image analysis: A comprehensive review from conventional multilayer perceptron to popular convolutional neural network and potential visual transformer. Artif. Intell. Rev. 2023, 56, 1013–1070. [Google Scholar] [CrossRef]
- Afzal, S.; Ziapour, B.M.; Shokri, A.; Shakibi, H.; Sobhani, B. Building energy consumption prediction using multilayer perceptron neural network-assisted models; comparison of different optimization algorithms. Energy 2023, 282, 128446. [Google Scholar] [CrossRef]
- Van Houdt, G.; Mosquera, C.; Nápoles, G. A review on the long short-term memory model. Artif. Intell. Rev. 2020, 53, 5929–5955. [Google Scholar] [CrossRef]
- Wu, H.; Xin, C.; Liu, Y.; Rao, R.; Li, Z.; Zhang, D.; Wu, Y.; Han, S. Intelligent fault diagnosis for triboelectric nanogenerators via a novel deep learning framework. Expert Syst. Appl. 2023, 226, 120244. [Google Scholar] [CrossRef]
- Cunha, B.Z.; Droz, C.; Zine, A.M.; Foulard, S.; Ichchou, M. A review of machine learning methods applied to structural dynamics and vibroacoustic. Mech. Syst. Signal Process. 2023, 200, 110535. [Google Scholar] [CrossRef]
- Zuo, C.; Qian, J.; Feng, S.; Yin, W.; Li, Y.; Fan, P.; Han, J.; Qian, K.; Chen, Q. Deep learning in optical metrology: A review. Light Sci. Appl. 2022, 11, 1–54. [Google Scholar] [CrossRef]
- Zhang, W.; Deng, L.; Yang, L.; Yang, P.; Diao, D.; Wang, P.; Wang, Z. Multilanguage-handwriting self-powered recognition based on triboelectric nanogenerator enabled machine learning. Nano Energy 2020, 77, 105174. [Google Scholar] [CrossRef]
- Ji, X.; Zhao, T.; Zhao, X.; Lu, X.; Li, T. Triboelectric nanogenerator based smart electronics via machine learning. Adv. Mater. Technol. 2020, 5, 1900921. [Google Scholar] [CrossRef]
- Zhu, M.; Sun, Z.; Zhang, Z.; Shi, Q.; He, T.; Liu, H.; Chen, T.; Lee, C. Haptic-feedback smart glove as a creative human-machine interface (HMI) for virtual/augmented reality applications. Sci. Adv. 2020, 6, eaaz8693. [Google Scholar] [CrossRef]
- Ye, C.; Yang, S.; Ren, J.; Dong, S.; Cao, L.; Pei, Y.; Ling, S. Electroassisted core-spun triboelectric nanogenerator fabrics for intellisense and artificial intelligence perception. ACS Nano 2022, 16, 4415–4425. [Google Scholar] [CrossRef]
- Zhang, H.; Cheng, Q.; Lu, X.; Wang, W.; Wang, Z.; Sun, C. Detection of driving actions on steering wheel using triboelectric nanogenerator via machine learning. Nano Energy 2021, 79, 105455. [Google Scholar] [CrossRef]
- Das, S.; Bhuyan, R.; Baro, B.; Das, U.; Sharma, R.; Bayan, S. Flexible triboelectric nanogenerators of Au-g-C3N4/ZnO hierarchical nanostructures for machine learning enabled body movement detection. Nanotechnology 2023, 34, 445501. [Google Scholar] [CrossRef] [PubMed]
- Niu, S.; Wang, Z.L. Theoretical systems of triboelectric nanogenerators. Nano Energy 2015, 14, 161–192. [Google Scholar] [CrossRef]
- Zhang, Q.; Xin, C.; Shen, F.; Gong, Y.; Zi, Y.; Guo, H.; Li, Z.; Peng, Y.; Zhang, Q.; Wang, Z.L. Human body IoT systems based on the triboelectrification effect: Energy harvesting, sensing, interfacing and communication. Energy Environ. Sci. 2022, 15, 3688–3721. [Google Scholar] [CrossRef]
- Lu, S.; Lei, W.; Gao, L.; Chen, X.; Tong, D.; Yuan, P.; Mu, X.; Yu, H. Regulating the high-voltage and high-impedance characteristics of triboelectric nanogenerator toward practical self-powered sensors. Nano Energy 2021, 87, 106137. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, K.; Al-Durra, A.; Muyeen, S.M.; Zhou, D. A state-of-the-art review on wind power converter fault diagnosis. Energy Rep. 2022, 8, 5341–5369. [Google Scholar] [CrossRef]
- Lone, S.A.; Lim, K.C.; Kaswan, K.; Chatterjee, S.; Fan, K.P.; Choi, D.; Lee, S.; Zhang, H.; Cheng, J.; Lin, Z.H. Recent advancements for improving the performance of triboelectric nanogenerator devices. Nano Energy 2022, 99, 107318. [Google Scholar] [CrossRef]
- Singh, D.; Singh, B. Investigating the impact of data normalization on classification performance. Appl. Soft Comput. 2020, 97, 105524. [Google Scholar] [CrossRef]
- Al Shalabi, L.; Shaaban, Z.; Kasasbeh, B. Data mining: A preprocessing engine. J. Comput. Sci. 2006, 2, 735–739. [Google Scholar] [CrossRef]
- Hochreiter, S. Long Short-term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in vegetation remote sensing. ISPRS J. Photogramm. Remote Sens. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- Alzubaidi, L.; Zhang, J.; Humaidi, A.J.; Al-Dujaili, A.; Duan, Y.; Al-Shamma, O.; Santamaría, J.; Fadhel, M.A.; Al-Amidie, M.; Farhan, L. Review of deep learning: Concepts, CNN architectures, challenges, applications, future directions. J. Big Data 2021, 8, 53. [Google Scholar] [CrossRef] [PubMed]
- Cana, J.P.L.; Herrero, J.G.; Lopez, J.M.M. An approach to forecasting and filtering noise in dynamic systems using LSTM architectures. Neurocomputing 2022, 500, 637–648. [Google Scholar] [CrossRef]
- Tan, H.; Sun, D.; Guo, H.; Wang, Y.; Shi, J.; Zhang, H.; Wang, W.; Zhang, F.; Gao, M. LDIPRS: A novel longitudinal driving intention prior recognition technique empowered by TENG and deep learning. Nano Energy 2024, 129, 110087. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Liu, J.; Shao, Y.; Ni, X.; Xie, J.; Luo, H.; Yang, T. Rotational Triboelectric Nanogenerator with Machine Learning for Monitoring Speed. Sensors 2025, 25, 2533. https://doi.org/10.3390/s25082533
Zhang C, Liu J, Shao Y, Ni X, Xie J, Luo H, Yang T. Rotational Triboelectric Nanogenerator with Machine Learning for Monitoring Speed. Sensors. 2025; 25(8):2533. https://doi.org/10.3390/s25082533
Chicago/Turabian StyleZhang, Chun, Junjie Liu, Yilin Shao, Xingyi Ni, Jiaheng Xie, Hongchun Luo, and Tao Yang. 2025. "Rotational Triboelectric Nanogenerator with Machine Learning for Monitoring Speed" Sensors 25, no. 8: 2533. https://doi.org/10.3390/s25082533
APA StyleZhang, C., Liu, J., Shao, Y., Ni, X., Xie, J., Luo, H., & Yang, T. (2025). Rotational Triboelectric Nanogenerator with Machine Learning for Monitoring Speed. Sensors, 25(8), 2533. https://doi.org/10.3390/s25082533