Introduction
Biosensors are sensors that use biological components, usually enzymes, which catalyse the interaction with an analyte [
1-
3]. The amperometric biosensors measure the Faradaic current that arises on a working indicator electrode by direct electrochemical oxidation or reduction of the products of the biochemical reaction [
4,
5]. In amperometric biosensors the potential at the electrode is held constant while the current is measured. Amperometric biosensors are known to be reliable, cheap and highly sensitive for environment, clinical and industrial purposes [
6,
7].
In some applications of biosensors, enzymes are archival and only available in every limited quantity or are the products of combinatorial synthesis procedures and thus, are only produced in microgram to milligram quantities. These include point-of-care testing [
8], high throughput drug discovery [
9], detection of biological warfare agents [
10], astrobiology [
11] and others. Such applications of biosensors require high-density arrays of microvolume reaction vessels. Because of this, miniaturization of biosensors is a very important trend in biotechnology. The application of arrays of microreactors is one way of miniaturization.
Since it is not generally possible to measure the concentration of a substrate inside enzyme domains with analytical devices, starting from seventies various mathematical models of amperometric biosensors have been developed and used as an important tool to study and optimise analytical characteristics of actual biosensors [
12-
16]. The goal of this investigation is to make a model allowing an effective computer simulation of a biosensor system based on an array of enzyme microreactors immobilised on a single electrode.
The developed model is based on diffusion equations [
17,
18], containing a non-linear term related to the Michaelis-Menten kinetics of the enzymatic reaction. The model involves three regions: an array of microreactors where enzyme reaction as well as mass transport by diffusion takes place, a diffusion limiting region where only the diffusion takes place, and a convective region, where the analyte concentration is maintained constant. The enzyme microreactors were modeled by identical particles (right cylinders) and by strips (right longitudinal quadrangular prisms) distributed uniformly on the electrode surface.
Using a computer simulation the influence of the geometry of the microreactors as well as of the diffusion region on the biosensor response was investigated. The computer simulation was carried out using the finite difference technique [
19].
Mathematical model
Consider a scheme where the substrate (S) is enzymatically converted to the product (P) [
3],
We have discussed two different types of the geometry of the enzyme microreactors: cylinders and strips. However, the profile at
Y-plane (
Fig. 1c) is the same for both types of the microreactors. Nevertheless, the corresponding mathematical models have to be formulated differently. In the case of the cylinders (
Fig. 1a), we formulate a two-dimensional-in-space (2-D) model in cylindrical coordinates, while in the next case (
Fig. 1b) we formulate 2-D model in Cartesian ones.
In the profile (
Fig. 1c), parameter
b stands for the half width (radius) of the entire unit cell, while
a stands for the half width (radius) of the enzyme microreactor.
c is the height of the microreactor. The fourth parameter
d is the thickness of the diffusion layer.
The diffusion region surrounding the microreactors is known as the Nernst diffusion layer [
23]. According to the Nernst approach, the diffusion takes place in a finite layer of the buffer solution.
Away from it, the solution is in motion and uniform in concentration. The thickness of the Nernst layer remains unchanged with time. If a substrate is well-stirred and in powerful motion, then rather often the Nernst diffusion layer is neglected [
13,
24]. However, in practice, the zero thickness of the Nernst layer can not be achieved [
5,
23]. Because of this, we assume that the mass transport during the biosensor action obeys a finite diffusion regime.
Let Ω and Ω
0 be open regions corresponding to the entire domain to be considered and enzyme region, respectively, and Γ - the bulk solution/enzyme border,
where
x and
z stand for the space in both systems of coordinates: Cartesian and cylindrical.
Let Ω̅ and Ω̅
0 denote the corresponding closed regions. Coupling the enzyme-catalysed reaction in the enzyme region with the two-dimensional-in-space mass transport by diffusion, described by Fick's law, leads the system of the reaction-diffusion equations (
t > 0),
where
t stands for time, Δ is the Laplace operator,
Se(
x,
z,
t),
Sb(
x,
z,
t), (
Pe(
x,
z,
t),
Pb(
x,
z,
t)) are the substrate (reaction product) concentrations in the enzyme and bulk solution, respectively,
De,
Db are the diffusion coefficients,
Vmax is the maximal enzymatic rate and
KM is the Michaelis constant. The expression of the Laplace operator depends on the system of coordinates [
17].
In the domain presented in
Fig. 1c,
z = 0 represents the electrode surface, and Γ corresponds to the bulk solution/enzyme interface. The biosensor operation starts when the substrate appears over the surface of the enzyme region. This is used in the initial conditions (
t = 0),
where
S0 is the concentration of substrate in the bulk solution.
The following boundary conditions express the symmetry of the biosensor:
In the scheme
(1) the product (P) is an electro-active substance. The electrode potential is chosen to keep the zero concentration of the product at the electrode surface. The substrate (S) does not react at the electrode surface. This is used in the boundary conditions (
t > 0) given by
On the surface Γ we define the matching conditions (
t > 0),
where
n stands for the normal direction.
In a special case when
a =
b, the model
(3)-
(8) describes an operation of flat membrane biosensors [
2,
3,
25].
The measured current is accepted as a response of a biosensor in a physical experiment. The current depends upon the flux of the electro-active substance (product) at the electrode surface, i.e. on the border
z = 0. Consequently, the density
i(
t) of the biosensor current at time
t can be obtained explicitly from the Faraday's and Fick's laws. In the case of the Cartesian coordinates,
i(
t) is expressed as follows:
where
ne is a number of electrons involved in a charge transfer, and
F is the Faraday constant. The following expression defines
i(
t) in the case of the cylindrical coordinates:
where
φ is the third cylindrical coordinate.
We assume, that the system
(3)-
(8) approaches a steady-state as
t → ∞
where
i∞ is the steady-state biosensor current.
Digital simulation
Close mathematical solutions are not usually possible when analytically solving multi-dimensional non-linear partial differential equations with complex boundary conditions. Therefore, the problem was solved numerically [
18,
24]. The finite difference technique was applied for discretization of the mathematical model [
19].
We introduced an uniform discrete grid in all directions:
x,
z and
t [
22,
25,
26]. Using the alternating direction method, an implicit finite difference scheme has been built as a result of the difference approximation of the model. The resulting systems of linear algebraic equations were solved efficiently because of the tridiagonality of their matrices. Having a numerical solution of the problem, the density of the biosensor current was calculated easily. The software was programmed in JAVA language [
27].
The mathematical model as well as the numerical solution of the model was evaluated for different values of the maximal enzymatic rate Vmax, substrate concentration S0 and the geometry of the enzyme microreactors.
We assumed the upper layer of the thickness
δN =
d -
c from the enzyme region as the Nernst diffusion layer. The thickness
δN of the Nernst layer depends upon the nature and stirring of the buffer solution. Usually, the more intensive stirring corresponds to the thinner diffusion layer. In practice, the zero thickness of the Nernst layer can not be achieved. In a case when the solution to be analysed is stirred by rotation of the enzyme electrode, the thickness
δN of the Nernst diffusion layer may be minimized up to 0.02 mm by increasing the rotation speed [
5,
23]. That thickness of the Nernst layer,
δN =
d -
c = 0.02 mm, we used to simulate the biosensor action changing other parameters.
The following values of the parameters were default in the numerical simulation of all the experiments:
The steady-state biosensor current i∞ (the biosensor response) as well as the time moment of occurrence of the steady-state current (response time) were assumed and analysed as ones of the most important characteristics of biosensors.
In digital simulation, the biosensor response time was assumed as the time when the absolute current slope value falls below a given small value normalised with the current value. In other words, the time needed to achieve a given dimensionless decay rate
ɛ is used:
Consequently, the current at the response time
tR was assumed as the steady-state biosensor current
i∞. In calculations, we used
ɛ = 10
-4. However, the response time
tR as an approximate steady-state time is very sensitive to the decay rate
ɛ, i.e.
tR → ∞, when
ɛ → 0. Because of this, we employed a half of steady-state time to investigate the behaviour the response time [
17]. The resultant relative output signal function
i*(
t) can be expressed as follows:
where
i(
t) is the output current density at time
t as defined in
(9) and
(10),
iR is assumed as the steady-state current
i∞. Let us notice, that 0 ≤
i*(
t) ≤ 1 at all
t ≥ 0,
i*(0) = 1 and
i*(
tR) = 0. Let
t0.5 be the time at which the reaction-diffusion process reaches the medium, called half-time of steady-state or, particularly, half of the time moment of occurrence of the maximal current, i.e.,
i*(
t0.5) = 0.5.
The adequacy of the mathematical and numerical models was evaluated using known analytical solutions for amperometric biosensors with a single flat enzyme layer. At relatively low concentrations of the substrate,
S0 ≪
KM, the steady-state current can be calculated as follows [
12]:
where
c is the thickness of the enzyme layer. The dimensionless factor
σ2 is known as the diffusion modulus (Damköhler number) [
17,
18]. In the case of flat biosensors the diffusion modulus
σ2 essentially compares the rate of enzyme reaction (
Vmax/
KM) with the diffusion through the enzyme layer (
c2/
De). The biosensor response is known to be under diffusion control when
σ2 ≫ 1. If
σ2 ≪ 1, then the enzyme kinetics predominates in the response. The model
(3)-
(8) is applied to the enzyme membrane biosensors when
a =
b is assumed.
In the case of very high substrate concentration,
S0 ≫
KM, the stationary current is expressed as follows [
28]:
The numerical solution of the model
(3)-
(8) was compared with the analytical ones
(15) and
(17), accepting
a =
b =
c =
d = 0.1 mm at various values of
Vmax: 1, 10, 100, 1000 μM/s and two values of
S0: 10
-8, 0.1 M. In all the cases, the relative difference between the numerical and analytical solutions was less than 1%.
Results and discussion
Using numerical simulation, the influence of the geometry of the enzyme microreactors on the steady-state current was investigated. Firstly, we calculated values of the biosensor current at different values of the half-width
a of the enzyme microreactors keeping all other parameters constant.
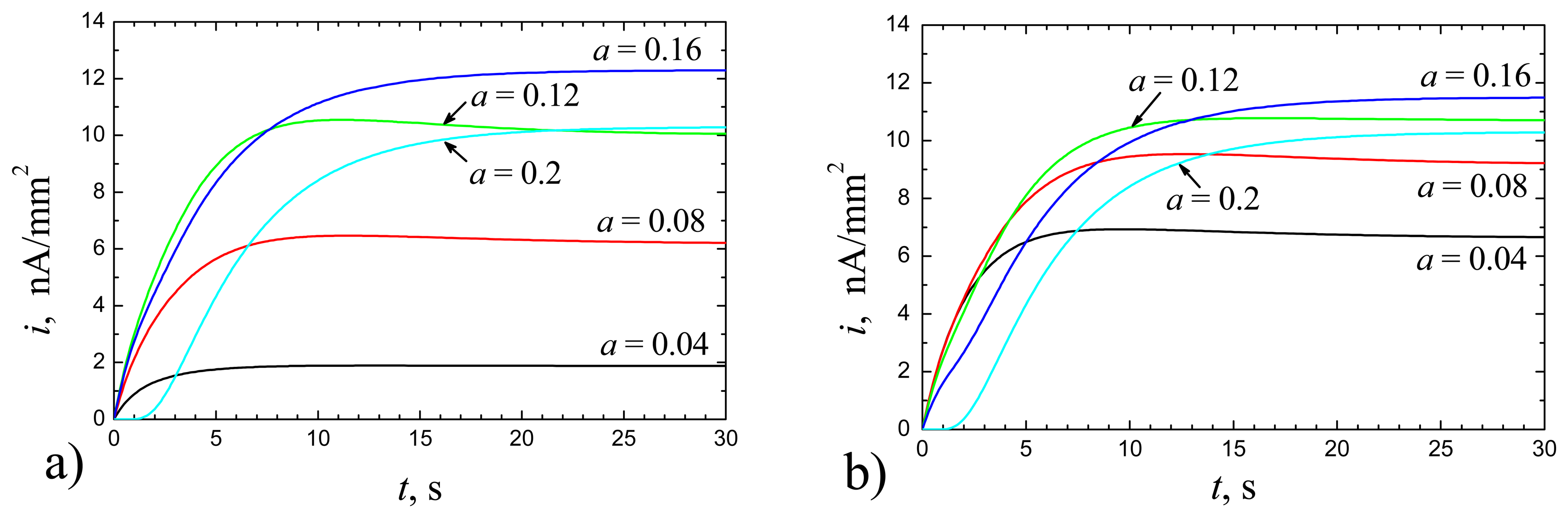
Fig. 2 shows the dynamics of the biosensor current
i at the height
c = 0.1 mm of the microreactors,
b = 2
c = 0.2 mm,
d =
c +
δN = 0.12 mm,
Vmax = 100 μM/s,
S0 = 20 μM and five values of the half-width
a of the microreactors: from 0.2
b to
b. The enzyme microreactors were modeled by cylinders (
Fig. 2a) and by strips (
Fig. 2b).
One can see in
Fig. 2, that the half-width
a of the enzyme microreactors significantly effects the biosensor current
i as well as the response time. In the case of continuous membrane (
a =
b = 0.2 mm), the biosensor current is a monotonous increasing function of time
t. However, when
a <
b,
i is a non-monotonous function of
t.
Fig. 2 shows, that the steady-state biosensor current is also a non-monotonous function of
a. To investigate that effect in details we calculate the steady-state current
iR at different values of the half-width
b of entire unit changing the half-width
a of the microreactor. To compare the response of a biosensor based on an array of the microreactors (
a <
b) with the response of the corresponding flat (membrane) biosensor (
a =
b), we introduce the normalised steady-state current
iN(
θ) as a function of the degree
θ of the electrode surface coverage,
where
iR(
θ) ≈
i∞(
θ) is the steady-state biosensor current calculated at the degree
θ of the coverage, 0 <
θ ≤ 1. The dimensionless degree
θ was expressed as the area of the bases of all enzyme microreactors divided by the area of the whole electrode surface. The case when
θ = 1 corresponds to a flat biosensor, i.e. fully covered by enzyme mono-layer. In the case when microreactors are modeled by cylinders (
Fig. 1a),
θ =
a2/
b2, and
θ =
a/
b in the case of strips (
Fig. 1b).
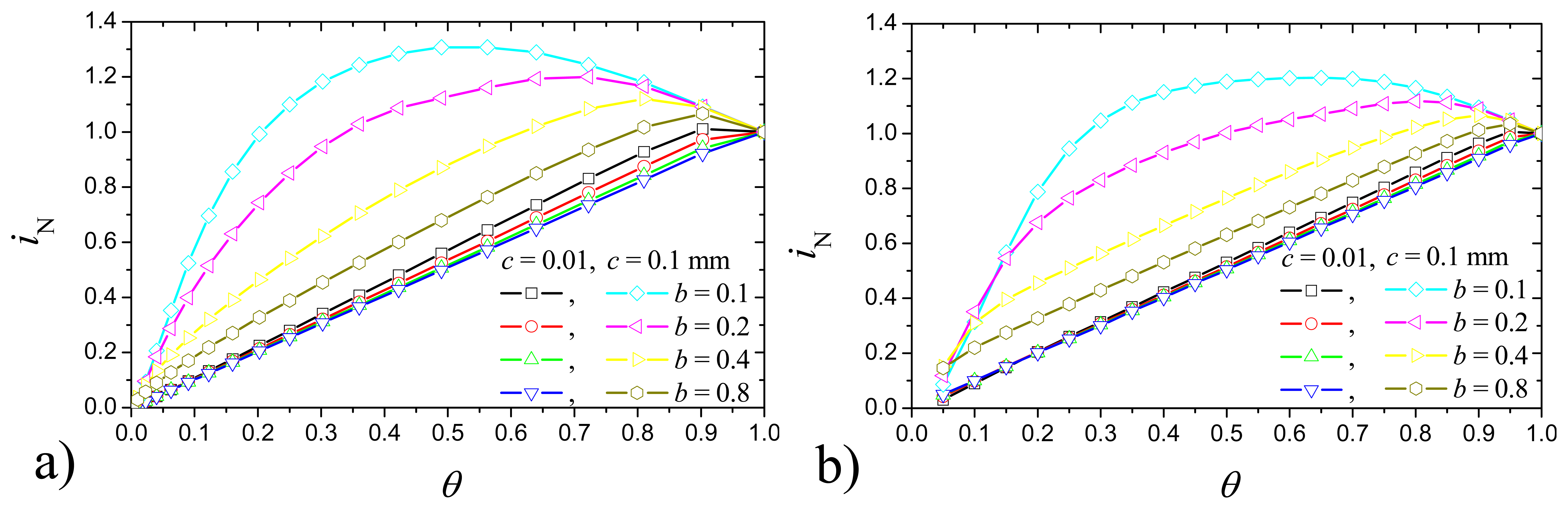
Fig. 3 shows the normalised steady-state current
iN versus the degree
θ of the electrode coverage at four values of
b and two values of the height
c of the microreactors,
d =
c + 0.02 mm,
Vmax = 100 μM/s,
S0 = 20μM.
One can see in
Fig. 3, in the case of
c = 0.1 mm, the steady-state current is a non-monotonous function of the degree
θ of the electrode coverage. At 10 times smaller value of
c the normalised current
iN increases monotonously at 0 <
θ ≤ 1. This property is valid for both systems of coordinates: cylindrical and Cartesian. In the case of
c =
b = 0.1 mm, the relative difference between steady-state current at
θ = 0.5 and another one at
θ = 1 exceeds 30% in the case of cylinders (
Fig. 3a) and exceeds 20% in the case of strips (
Fig. 3b). The shape of corresponding curves is very similar for both systems of coordinates. Let us notice, that the volume of enzyme microreactors is directly proportional to the degree
θ, when the height
c of the microreactors is kept constant. Although, the biosensor, based on an array of microreactors, is of less enzyme volume (
θ < 1) than the corresponding membrane one (
θ = 1), the array biosensor can generate an even higher steady-state current than the membrane one.
The variation of the half-width
b of the entire unit keeping
θ and
c constant does not change the volume of the microreactors. Since
iN varies with
b (
Fig. 3), the biosensor response depends also on the shape of the enzyme microreactors not only on their volume. The smaller value of
b corresponds to the denser distribution of the enzyme microreactors on the electrode surface. The denser microreactors are distributed the higher the steady-state current is generated.
The biosensor response considerably depends on the fact that either the enzyme kinetics or the mass transport predominate in the biosensor response [
2,
3,
26]. Assuming the continuous enzyme layer (
a =
b) of thickness
c = 0.1 mm, the diffusion modulus
σ2, calculated at
Vmax = 100 μM/s and values given in
(12), equals approximately to 33.3, i.e. the biosensor response is under diffusion control. While at ten times smaller value of
c (0.01 mm),
σ2 equals approximately to 0.33 and consequently the enzyme kinetics controls the biosensor response. According to
Fig. 3 the steady-state current is a non-monotonous function of the degree
θ of the electrode coverage when
σ2 > 1, i.e. when the biosensor response is significantly under diffusion control. Additional calculations approved this property.
One can see from
(9) and
(10) that the biosensor current depends on the internal diffusion coefficient
De as well as the external one
Db. In calculations above, assuming the mass transport in bulk solution is faster than in enzyme, we used
Db = 2
De as defined in
(12). This assumption is not firmly grounded [
29]. Because of this, we calculated steady-state currents for two more values of the external diffusion coefficient
Db:
De and 4
De.
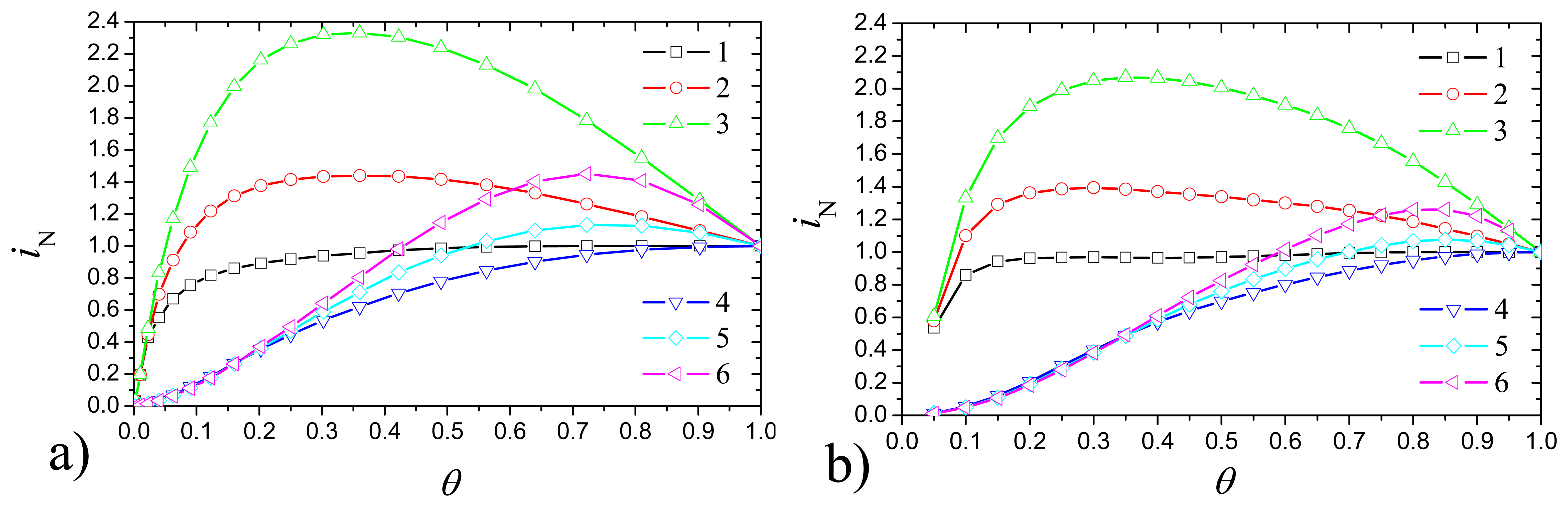
Fig. 4 shows the normalised steady-state current
iN versus the degree
θ of the electrode coverage at
b =
c = 0.1 mm,
d =
c + 0.02 mm,
S0 = 20 μM, and two maximal enzymatic rates
Vmax: 10, 1000 μM/s.
Fig. 4 shows the valuable influence of the external diffusion coefficient
Db on the biosensor response. The non-monotony of the normalised steady-state current is observed at
Db >
De only. The higher the coefficient of the external diffusion is the higher the amplification of the signal is observed due the suitable geometry of the microreactors. The biosensor based on an array of microreactors can generate higher steady-state current than the corresponding membrane one only if it operates in bulk solution having diffusion coefficient higher than the diffusion coefficient in the enzyme. Since the higher maximal enzymatic rate influences the higher diffusion modulus
σ2, the effect of the signal amplification is more notable at
Vmax of 1 mM/s rather than at
Vmax = 10 μM/s.
Using computer simulation we have investigated the dependence of the steady-state biosensor current as well as biosensor response time on the substrate concentration
S0. The investigation was carried out at the following values of
Vmax: 0.01, 0.1, 1, 10 and 100 μM/s to get results for a wide range of values of the maximal enzymatic rate. The size of microreactors (
b =
c = 0.1 mm,
θ = 0.5) was chosen using the results presented in
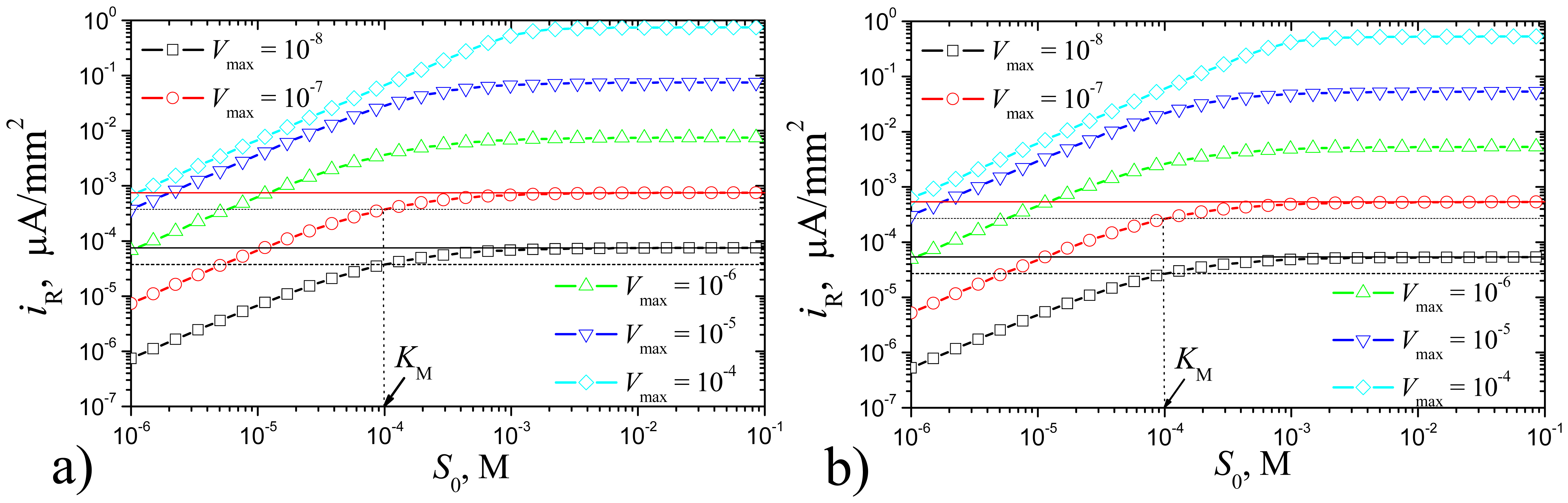
Fig. 3 so that the biosensor current is about to be the highest. Results of calculations are depicted in
Figs. 5 and
6. As it is possible to notice in
Fig. 5, the steady-state biosensor current
iR is a monotonous increasing function of
S0 at all values of
Vmax. The shape of all curves is very similar to that observed in the case of membrane biosensors [
2,
3,
26].
The Michaelis constant
KM is known to be the substrate concentration at which the reaction rate is half its maximal value.
Fig. 5 shows the effect of halving for two values of
Vmax: 0.01 and 0.1 μM/s at which enzyme kinetics controls the biosensor response. The relative difference between half of the maximum of the steady-state current and another one at
KM does not exceed 2% for both values of
Vmax. Consequently, the effect of halving is valid for biosensors based on an array of microreactors, like for membrane biosensors.
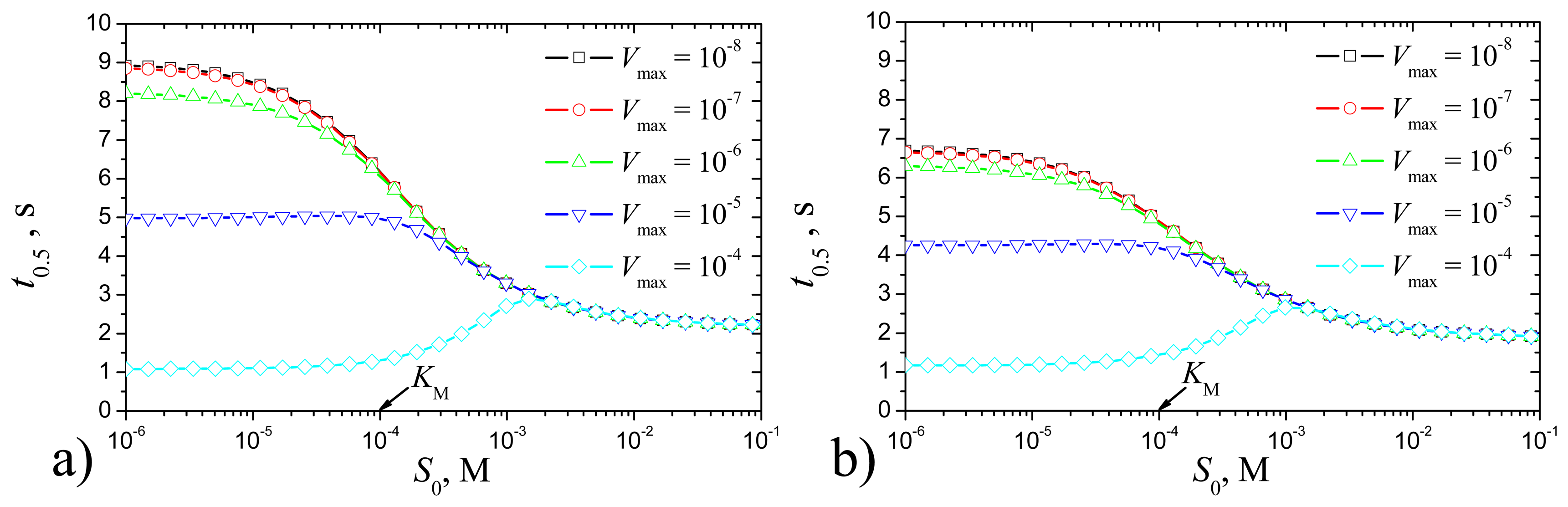
Fig. 6 shows the effect of substrate concentration
S0 on the half time
t0.5 of the steady state biosensor current. As it is possible to notice in
Fig. 6,
t0.5 represents a monotonous decreasing function of
S0 at
Vmax > 0.1 mM/s. At
S0 being between 0.1 and 10 mM (between
KM and 100
KM), a shoulder on the curve appears for
Vmax = 0.1 mM/s. It seems possible that the shoulder on the curve arises because of very high
Vmax. At substrate concentration
S ≫
KM the reaction kinetics for
S is a zero order throughout the microreactor, whereas for
S ≪
KM the kinetics is a first order throughout. At intermediate values of
S the kinetics changes from zero order to first order across the membrane. Similar effect was noticed during the oxidation of β-nicotinamide adenine dinucleotide (NADH) at poly(aniline)-coated electrodes [
30].
Figs. 5 and
6 show that at high substrate concentration
S0 > 10 mM (
S0 > 100
KM), the catalytic reaction makes no notable effect on the behaviour of biosensors based on an array of microreactors.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





