1. Introduction
Land surface temperature (LST) is an important parameter governing energy balance over land and an essential determinant driving dynamic change of earth resources and environment and the satellite based LST data is used widely in water cycling studies (
Su, et al, 2000a;
2005 and
2007). Emissivity of natural surfaces is an important parameter which relates closely to the determination of LST in the thermal infrared (TIR) remote sensing (
Becker, 1987;
Rubio et al, 1997). The biggest challenge in the TIR remote sensing is how to separate the surface emissivity and the surface temperature. At present, split window method is used often to solve this problem. Split window algorithm was originally developed for sea surface temperature mapping from NOAA-AVHRR data in 1970s. Spatial distribution of the thermal emissivity of sea surface is much more identical than that of land surface where heterogeneity is a common feature, which makes the solution of LST from thermal radiance transfer equation much more complicated for terrestrial areas. In addition, two essential parameters (atmospheric transmittance and ground emissivity) are required to be known as the premier of LST estimation using split window algorithms (
Coll et al., 1994;
Qin el al., 2001). Usually estimation of the two parameters is with some errors due to many uncertainty factors such as atmospheric profile data. Even if the properties of the atmosphere profile are known, for a radiometer with
N channels, there will be
N+1 unknowns (N emissivities plus one surface temperature) in
N thermal radiation balance equations based on
N radiance measurements. Therefore this system has no unique solution, unless additional independent information is provided (
Li, et al, 1999). Different assumptions have to be made to reduce the number of unknowns, for example, the temperature-emissivity separation method (
Gillespie, et al,. 1998), the grey body emissivity method (
Barducci and Pippi, 1996), and the day/night method (
Becker and Li, 1990;
Watson, 1992a;
Wan and Li, 1997). However, to validate the above assumptions and the emissivity retrievals, direct emissivity measurements or estimations are highly necessary. Furthermore, it was reported that emissivity retrievals are dependent on the spatial resolution and there exists scaling problem due to surface heterogeneity (
Moran, et al. 1997;
Liu, et al. 2006;
Wan, et al. 2002). Therefore, spatial distribution of surface emissivities is very important. Direct operational measurement of emissivity from space has not been demonstrated, although the conceptual design of emissivity measurement using carbon dioxide laser at 10.6 μm on aero-board to measure distribution of surface emissivities was presented (
Zhang, 1989) nearly two decades ago. Ground measurements of emissivity including both field and laboratory experiments, provide very useful priori knowledge which can benefit the thermal infrared remote sensing from space (
Nerry et al, 1988). Up to now, many approaches of ground measurements have been presented to measure the emissivity, which include box method (
Buettner and Kern, 1965;
Sobrino and Caselles, 1993), fourier transform infrared spectrometer (FTIR) method (
Nerry et al, 1988,
1990;
Rivard et al, 1995), CO
2 laser method (
Nerry,et al, 1991). In these in situ measurements, particular attention was often given to instrument calibration and the correction of the environmental radiation because of their importance in the determination of emissivity. However, the spatial distribution of surface emissivities was not studied sufficiently in the previous studies. To meet this requirement, an automatic instrumentation was specially designed to measure the spatial distribution of emissivity and to study scaling problem of emissivity and temperature. The details of the instrument will be described in this paper. It has to be pointed that the same instrument was previous used in the experiments (
Zhang, et al., 2004) by our group to do the spatial scaling behavior study of surface temperature based on a different experiment strategy. The improvements include: a) A reference box to determine the hot and cool environment irradiance; b) The emissivity of the reference box is known; c) The surface temperature of the box is not adjusted; d) new materials are used as samples in the measurement.
In the paper, the methodology of the emissivity measurements and the design of the instrument are presented in Section 2, followed by the description of the measuring procedures in Section 3. Then, the sensitivity of the measured emissivity induced by the four critical factors is analyzed based on a series of carefully designed experiments: a) quantifying the uncertainty of retrieving ambient radiance; b) evaluating the influence of the ambient radiance, the variation of the sample's temperature and the emissivity of reference box on the measurements; c) determining the ideal temperature difference between hot environment and cool environment, and the best conditions for determining sample emissivity with the instrument. Finally, the potential of using this instrument to study the scaling behaviors of surface emissivity and surface temperature caused by the heterogeneity of target was discussed.
2. Methodology
According to the thermal radiation balance equation, the measured radiance includes a reflection term from the environment (see
equation 1). The environment irradiance must be measured before the true surface temperature and the precise measurements of TIR emissivities in the laboratory or in the field can be achieved (
Rivard et al, 1995).
where,
M(
Trad,λ) is the radiance from the objects at wavelength
λ and
Trad is the radiative temperature.
ελ is the emissivity of the sample,
B(
Ts,λ) is Planck's radiation function at the sample temperature,
Ts for wavelength
λ and
B(
Tenvi,λ) is the irradiance coming from the environment and
Tenvi is the effective environmental temperature. Please be noted that
Tenvi is an equivalent temperature, which is introduced to simply equation. In the above equation, it is assumed that the reflection is Lambertian and the consideration of multi-scattering is omitted.
Even the ambient radiance
B(
Tenvi,λ) is known, the
ελ and
Ts can not be solved from only one equation. One feasible solution is to change the ambient radiance and then an additional equation can be obtained, for example, one measurement is performed under the clear sky, the other is inside cloth chamber (
Zhang, et al. 2004); or one is acquired with the illumination of CO
2 laser beam and the other is under clear sky (
Zhang, et al. 1989;
Nerry, et al. 1991). The first method was adopted in our work.
When using a broadband (8–14
μm) thermal camera in this work, sample emissivity can be obtained through four sequences of measurements of radiance:
where
Mr,
8–14 μm (
T1) and
Mr,
8–14 μm (
T4) are the radiances from reference box in ‘hot’ environment and in ‘cool’ environment measured respectively by the thermal camera.
Ms,
8–14 μm (
T2) and
Mr,
8–14 μm (
T3) are the radiances from the sample in ‘hot’ environment and in ‘cool’ environment integrated in the bandwidth of 8–14
μm respectively.
T is the temperature, subscript
h and
c represent ‘hot’ environment and ‘cool’ environment equivalent temperature, subscript
s and
r represent target object and reference box, respectively.
B8–14 μm (
T) is Planck's radiation function at the sample temperature
T integrated over the bandwidth of 8–14
μm. Because the change of hot and cool environments is done within several seconds, the temperature variation of the object can be neglect. Assuming
Ts2= Ts3 and eliminating the radiance emitted by the target itself from
Eq.(3) and
Eq.(4), the emissivity of the sample in the bandwidth of 8 – 14
μm can be obtained by
Eq.(6), which is an effective emissivity for a broad bandwidth (
Su, et al., 2000b). It has to be noted that time interval between the second measurement
Ms,
8–14 μm (
T2) and the third measurement
Ms,
8–14 μm (
T3) must be controlled as short as possible to ensure
Ts2= Ts3. Using the instrument in our work, time interval is no longer than about 5s, which can justify the assumption of the constant temperature of the object, especially for the sample with large thermal inertia.
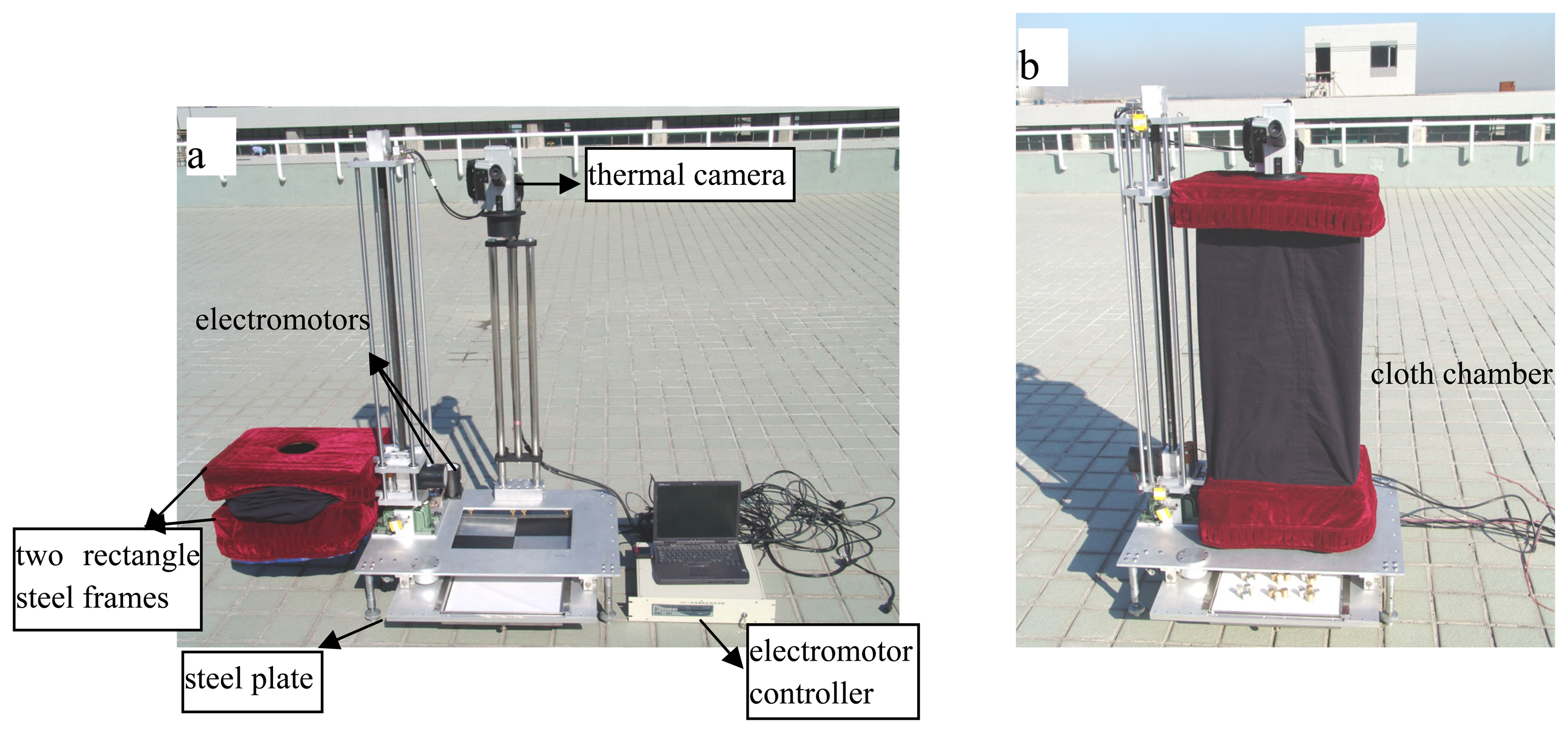
The instrument was designed to implement the above algorithm showed in
Figure. 1. It is composed of four parts: a) horizontal moving equipments, mainly including a steel plate on which hollow reference box and the samples can be put on it in the experiment. This part is designed to control the horizontal moving of the steel plate and is used to put the sample and the reference box under the view field of the thermal camera alternatively; b) horizontal rotating equipments, mainly including two rectangle steel frames on which the cloth chamber is fixed. The upper one can move in vertical direction and the lower one is fixed at a constant height. There is a central hole on the top of the cloth chamber through which radiometric measurements can be taken. This part is used to make the cloth chamber rotate in horizontal 180 azimuth angle, which controls the alternation of ‘hot’ environment (inside the cloth chamber) and ‘cool’ environment (outside the cloth chamber, namely sky environment); c) vertical moving equipments, it controls the vertical moving of the upper steel frame and stretching the cloth chamber and making the ‘hot’ environment. The above three components are all made of stainless steel, which makes the instrument durable in the field experiments. All movements of the three parts are driven by electromotor, so there are total three electromotors in the system. d) automatic controlling equipments, including a notebook computer and an electromotor controller. It is mainly used to control the behaviors of the three electromotors and the observation of thermal camera by means of a C++ program.
Using the above four parts, the whole system works in the following way step by step:
- 1)
putting the sample and the reference box in the steel plate and opening the thermal camera;
- 2)
under the driving of horizontal rotating equipments, the cloth chamber is situated over the reference box;
- 3)
under the drive of vertical moving equipments, the cloth chamber is stretched up and the ‘hot’ environment is made, after one second, the first measurement Mr, 8–14 μm (T1) is performed;
- 4)
switching the measured object from reference box to the sample by horizontal moving equipments, the second measurement Mr, 8–14 μm (T2) is completed;
- 5)
dropping the cloth chamber and rotating it off the sample by vertical moving equipments and horizontal rotating equipments as fast as possible, after one second, the third measurement Mr, 8–14 μm (T3) is obtained;
- 6)
switching the measured object from the sample to reference box by horizontal moving equipments, the fourth measurement Mr, 8–14 μm (T4) is acquired.
The whole operation is performed automatically and takes about 15 seconds totally. So the instrument is very convenient to operate. Low irradiance of the sky on a clear day and relatively high irradiance of a cloth chamber above the object are used to supply two different environmental irradiances, which is a prerequisite to directly measure emissivity from emission of surface.
For the measurement of temperature, we used a non-frozen thermal camera, which operates in the 8-14 μm spectral window with a temperature sensitivity of 0.1K. The dimension of every thermal image is 320×240. Its response time ranges between l/50s and l/60s. The pixel size will varies according to the distance between the thermal camera and the target object. The thermal camera was installed on the trestle table at height of 1.3m above the target object, so one image covered 0.4m×0.3m area. In the four measurements, three images per measurement were obtained with 0.23s interval time in case of bad image. For the same sample, we repeated the measurements for three times to ensure the validity of data.
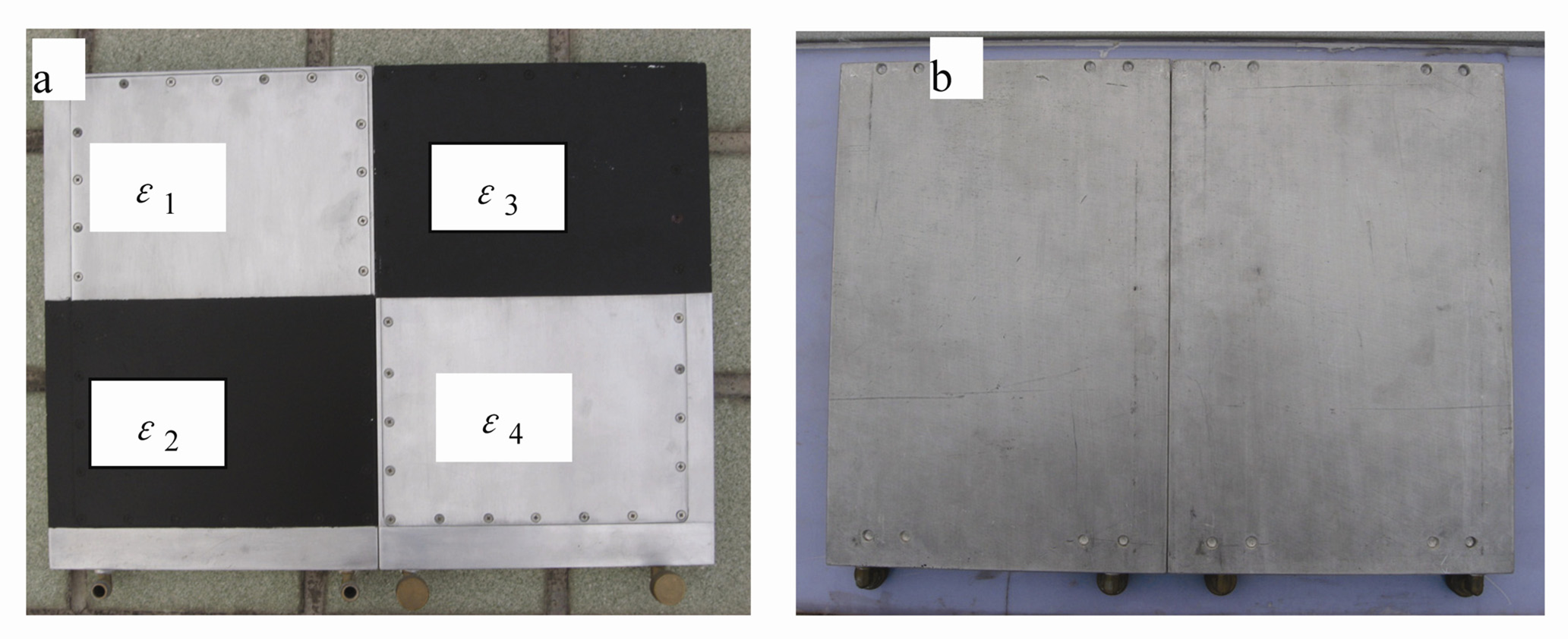
For calculating the ambient radiance, the reference boxes with known emissivities were used, which is shown in
Figure.2. It consisted of two hollow boxes made of aluminium. One half upper surface of every box was sprayed with a layer of black lacquer with high emissivity about 0.98. The other half and its undersurface were polished to grey-white body with an average surface roughness of 2-5 urn which can give low emissivity about 0.3 without specular reflection. The first value of emissivity is given by the manufacturer of the black paint; the second one has been determined by means of a portable instrument for measuring emissivity which has been validated in previous applications (Patent no, ZL 02 1 23745.X). There is a hole on the upper surface of every box, through which water with some temperature can be poured into it to make the box an isothermal surface and to control the surface temperature of the box. The size of reference boxes is 0.4m length and 0.3m width, which is determined according to the installation height and view field of the thermal camera.
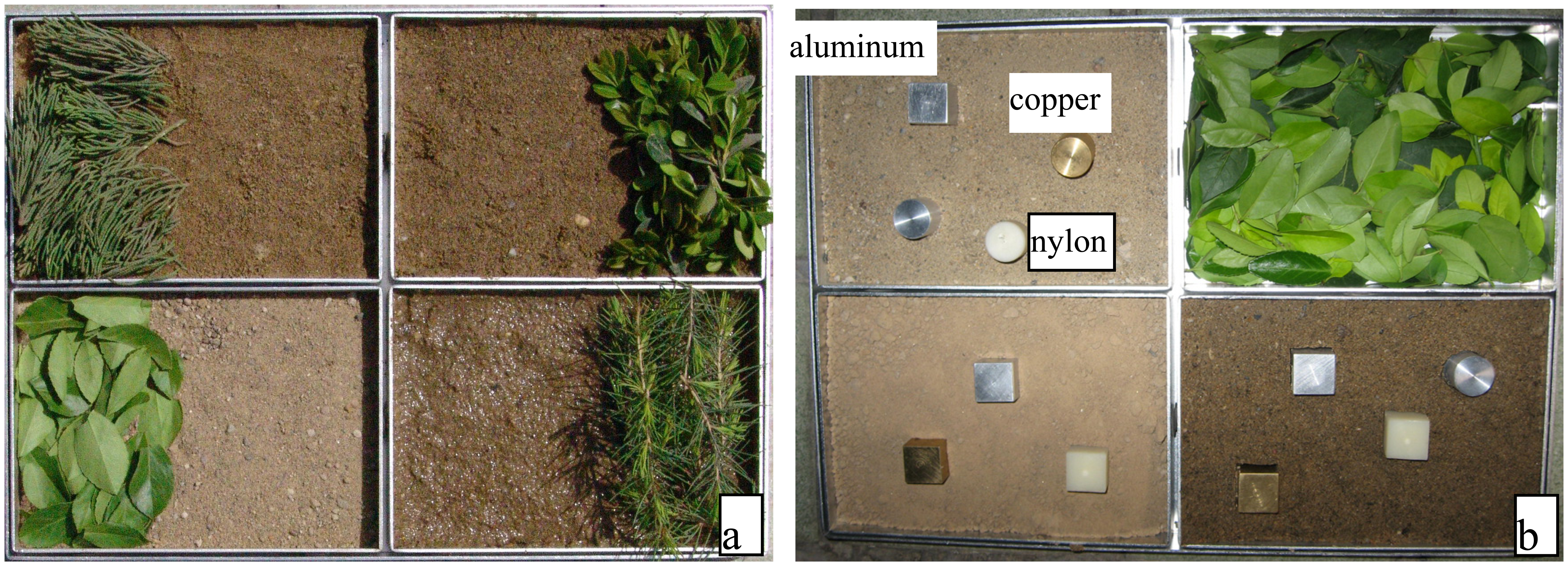
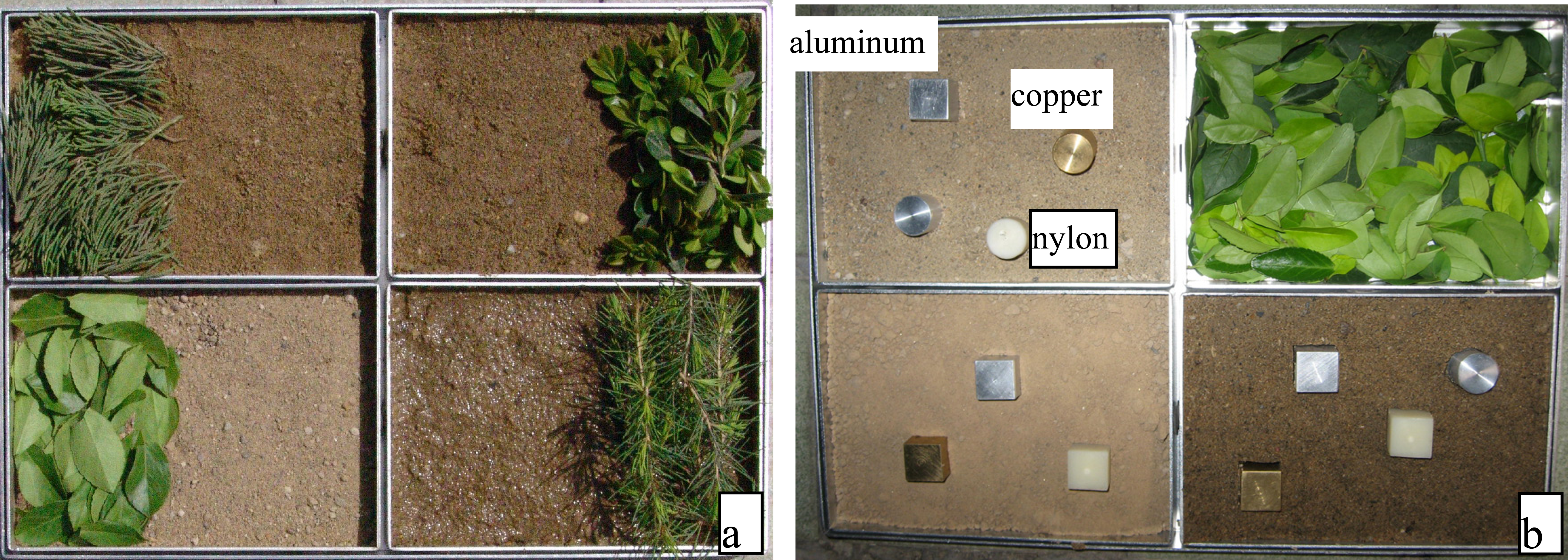
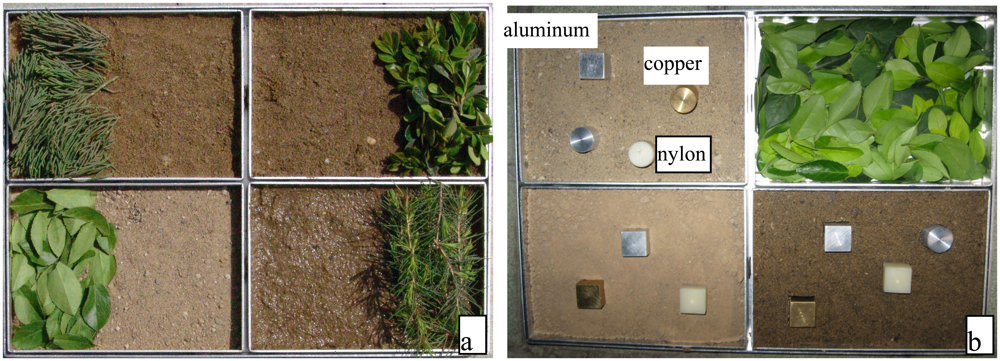
Another important component of the system is the sample plate. It is composed by four rectangle salvers; thereby different samples can be put in different salvers and can be observed at one time. Thus, using the thermal camera, spatial distribution of the thermal radiation of the samples can be obtained, which makes possible the study of the scaling behavior of the emissivity and the true surface temperature.
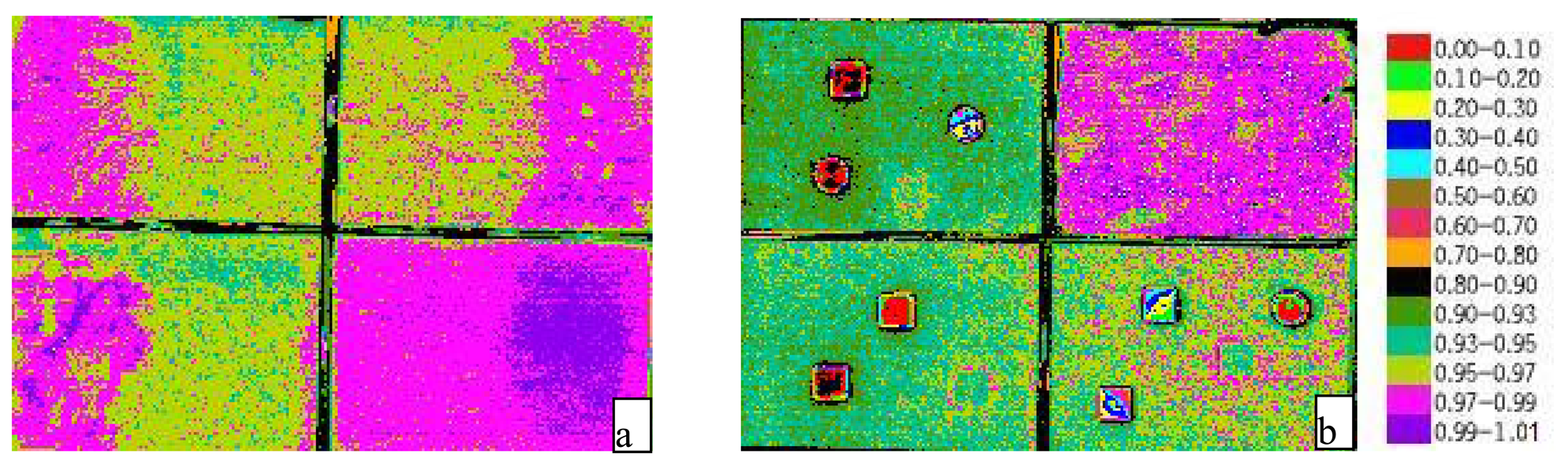
Figure.3 shows two of the samples used in our experiments. In
figure.3a, Silver sand with four different water content and some vegetation leaves were put in the salvers, where the lower-right soil is the wettest, the lower-left soil is the driest and upper-right soil is wetter than upper-left soil. In
figure.3b, Silver sand, agricultural soil, vegetation leaves and wet sandy soil were put in the upper-left salver, lower-left salver, upper-right salver and lower-right salver, respectively, and some metal blocks made of aluminum, copper and nylon were inserted in the soils. Thus, the configuration of large emissivity difference was built up, which provides great benefit for validating the system and the study of the emissivity scaling.
From
Eq.(6) we can see that ambient radiance,
B8–14 μm (
Th) and
B8–14 μm (
Tc), must be calculated firstly. According to
Eq.(2) or
Eq.(5), there are two methods: (a) if the surface temperature of reference box,
Tr, is known by measuring the temperature of the water inside, and in terms of the value of
Mr,
8–14 μm (
T1) and
εr,
8–14 μm,
B8–14 μm (
Th) of every Pixel would be obtained using
Eq.(2); (b) if
Tr can't be acquired, using the difference between the emissivity of reference box painted in black lacquer and the emissivity of polished aluminium, two equations as
Eq.(2) could be established for the same environment, based on which, the emittance from reference box and the average radiance from the environment can be solved. Similarly,
B8–14 μm (
Tc) can also be solved. Evidently, ambient radiance of every pixel can be obtained using the former method, but only average ambient radiance can be acquired using the latter method. It will produce different emissivity results using the two different ambient radiances due to the heterogeneity of ambient radiance. This problem will be discussed in detail in the following sections.
5. Ideal Temperature Difference between Hot Environment and Cool Environment
The above method for calculating emissivity is established on the basis of the series measurements respectively conducted in hot environment and in cool environment. It is by means of the irradiance difference of hot environment and cool environment that the emissivity can be retrieved. However, in the case that the irradiance difference of the two environments is small, it is highly possible that the emissivity can not be obtained due to large signal/noise ratio results from random errors and measurement errors during the measurement. That is to say, there exists a threshold for the irradiance difference of the two environments above which surface emissivity can be retrieved.
Using
ΔT=
T2-
T3 to express radiometric temperature difference of the sample measured in hot environment and in cool environment, the following equation can be acquired based on
Eq.(3) and
Eq.(4).
Because the accuracy of the thermal camera used in the experiment is 0.5k, Δ
T ≥ 0.5must be satisfied, and the irradiance difference of the two environments can be observed. In general, sample surface temperature (
Ts) is very close to the cool environmental temperature if the sample is put in this environment for enough time, so supposing
Ts =
Tc, the hot environmental temperature (
Th) can be estimated.
Table.6 lists the variation of the estimated environmental temperature difference (
Th-
Tc) with
ΔT for several samples when
Tc equals to 300k. For example, when ε
s= 0.98 and
ΔT=0.5,
Th-
Tc equals to 22.42, that is, the environmental temperature difference must larger than 22.42, then the emissivity can be calculated using the above method. So we can conclude that when soils or vegetations are observed, in terms of their emissivities (larger than 0.94), environmental temperature difference should be in the range from 8k to 23k, which is easy to be satisfied in clear day of spring and summer.
6. Scaling Effects of Emissivity Retrievals
A common approach to study the effects of resolution between fine and coarse resolution results is to compare data from sensors with varying resolutions or to aggregate fine resolution data to larger cell sizes (Garrigues et al, 2006; Liang, 2000; Chen, 1999; Raffy, 1994). Using our experimental data, scaling effects due to nonlinearity and discontinuous on emissivity retrievals are discussed by means of aggregating fine resolution data to larger cell sizes. Because if the surface emissivity and surface temperature variations are small within a pixel, there are almost no scaling effects (Becker and Li, 1995), in order to increase the emissivity and surface temperature contrast within the pixel and acquire obvious scaling effects, in the experiment, we adopted upper surface of the reference boxes as the sample. By means of pouring hot water into one reference box and pouring cool water into the other reference box, different combinations of emissivity and temperature: high surface emissivity with high temperature, high surface emissivity with low temperature, low surface emissivity with high temperature and low surface emissivity with low temperature, are established. In this way, a whole pixel (coarse resolution) with four sub-pixels (fine resolution) of identical area is constructed, seen from
Figure. 2a and will be used to study scaling effects.
Currently, two definitions of coarse resolution emissivity are often used in the applications. For a flat pixel composed by some homogeneous sub-pixels, if sub-pixel information is known, the emissivity for this pixel can be expressed as (
Norman and Becker, 1995;
Brunsell and Gillies, 2003)
where a1, a2 … are area proportion of sub-pixel in the whole pixel, a1 + a2 + … = 1, ε1, ε2, … are emissivities of sub-pixels, T1, T2, … are true surface temperature of sub-pixels, ρ is surface reflectivity in thermal wave band. T0 is a reference temperature for the whole pixel and often take the average value of all sub-pixel temperatures, Bi (T1), Bi (T2), … are radiance of black body with temperatures T1 and T2 for bandwidth i. Clearly, their only difference is that T1 and T2 are replaced by T0 in the denominator. The following equation quantifies the difference in emissivity retrievals between the two methods.
According to Kirchhoff's law, for an opaque surface,
ε +
ρ=1, so
Eq.(12) can be rewritten as
It should be noted that there is no scaling problem if acquiring coarse resolution emissivity by means of
Eq.(12), because essentially, surface emittance or reflectance at coarse resolution is the weighted result of emittance or reflectance of sub-pixels, which is a natural principle. Once ρ is measured,
ε can be obtained. Nevertheless, in practice, there is no way to acquire ρ in that the reflection term from atmospheric or environment and surface reflectance are bound together. Therefore, as the above section I mentioned, scaling problem would occur when using some algorithm to retrieve emissivity or temperature. Using
Eq.(14), we studied the scaling effects of emissivity.
According to the design of reference box, there are four sub-pixels,
ε1=0.3,
ε2=0.98,
ε3=0.3,
ε4=0.98,
a1=
a2=
a3=
a4=0.25,
T1=
T2,
T3=
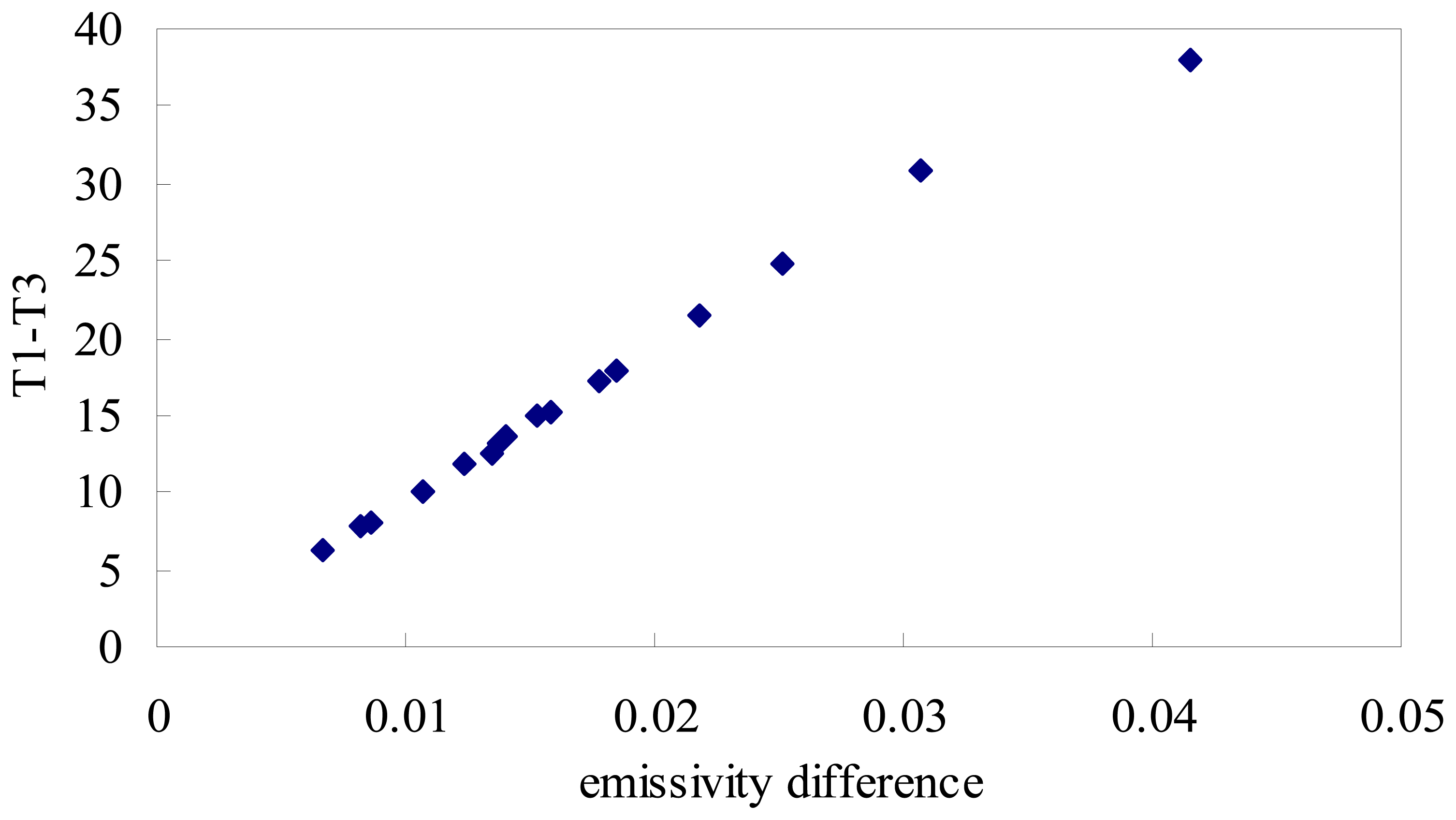
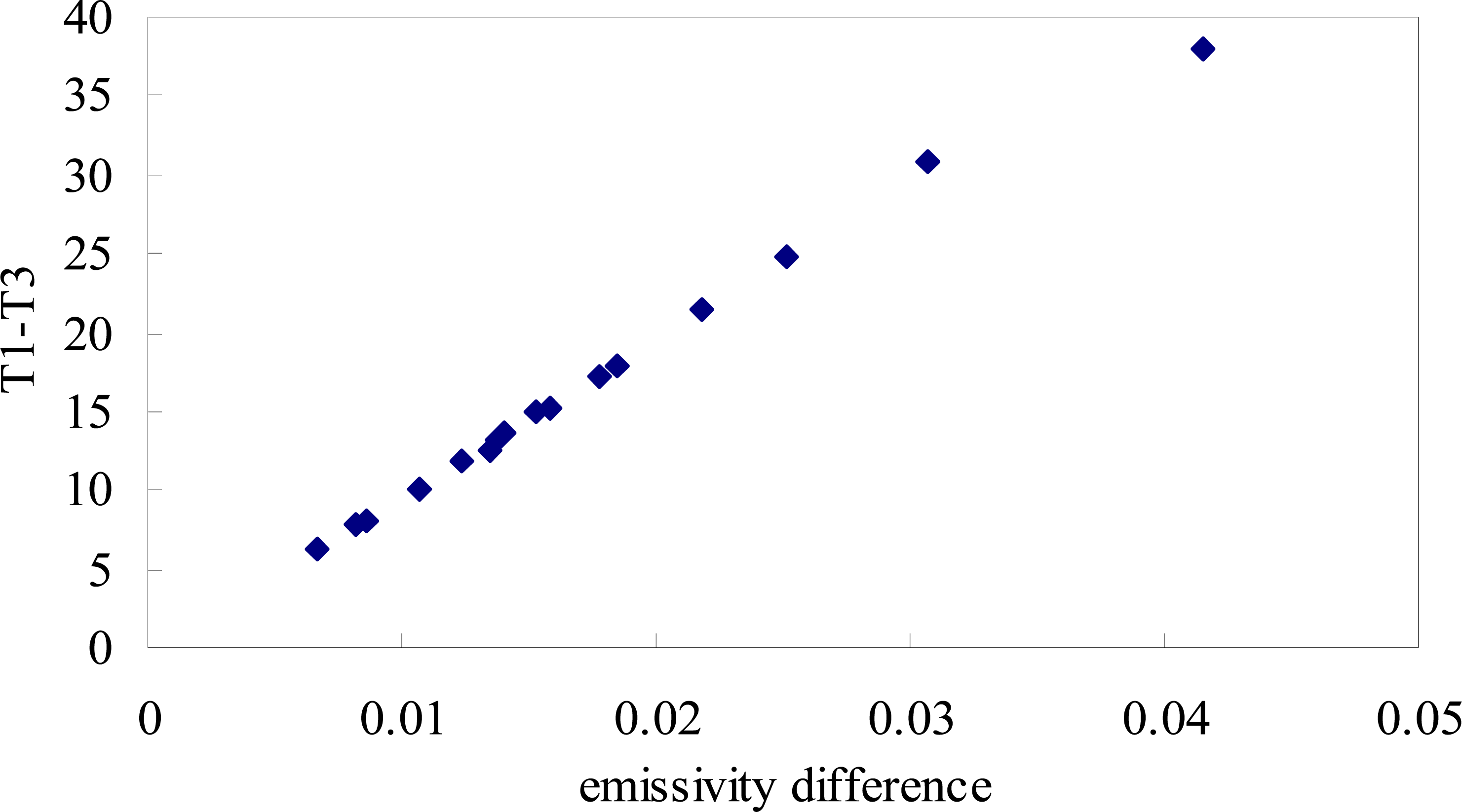
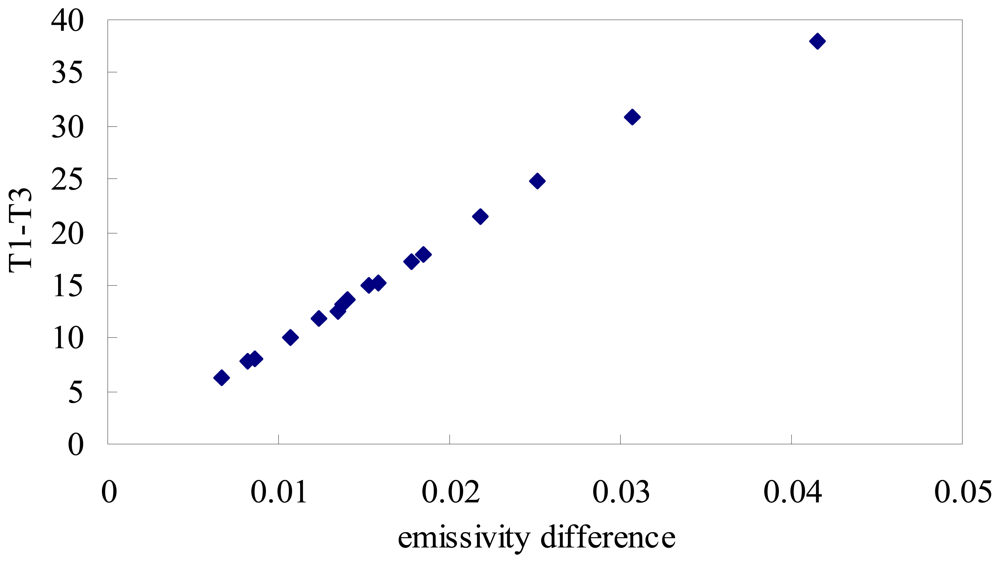
T4. Calculation results show that the magnitude of
Δ ε linearly depends on the temperature difference of sub-pixels (
T1 –
T3). From
figure.7, we can see that
Δε increases with increase of
T1 –
T3. When
T1 –
T3 equals to 38k,
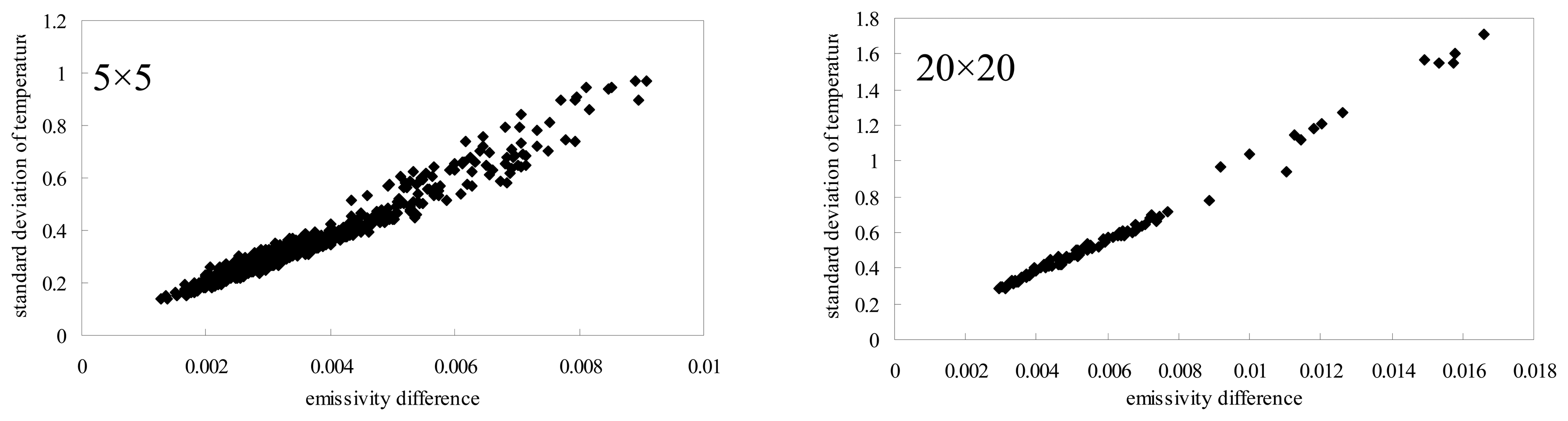
Δ ε can reach 0.04, which will produce large errors in surface temperature retrievals. Furthermore, using the emissivity retrievals of combinations of soils and vegetations, we obtained the similar linear results. There are total 240×180 pixels in a thermal image, correspondingly, there are 240×180 surface emissivity values. By integrating pixels of 5×5, 20×20, respectively, we obtained
figure.8a and figure.8b, where we used standard deviation of surface temperatures to express the heterogeneity of measured objects. Clearly, the more heterogeneity of the surface is, the larger emissivity difference is. 1.0 deviation of temperature results in about 0.01 emissivity difference. Therefore, Δ
ε must be evaluated and be corrected to fulfill the emissivity scaling.
7. Summary and Conclusions
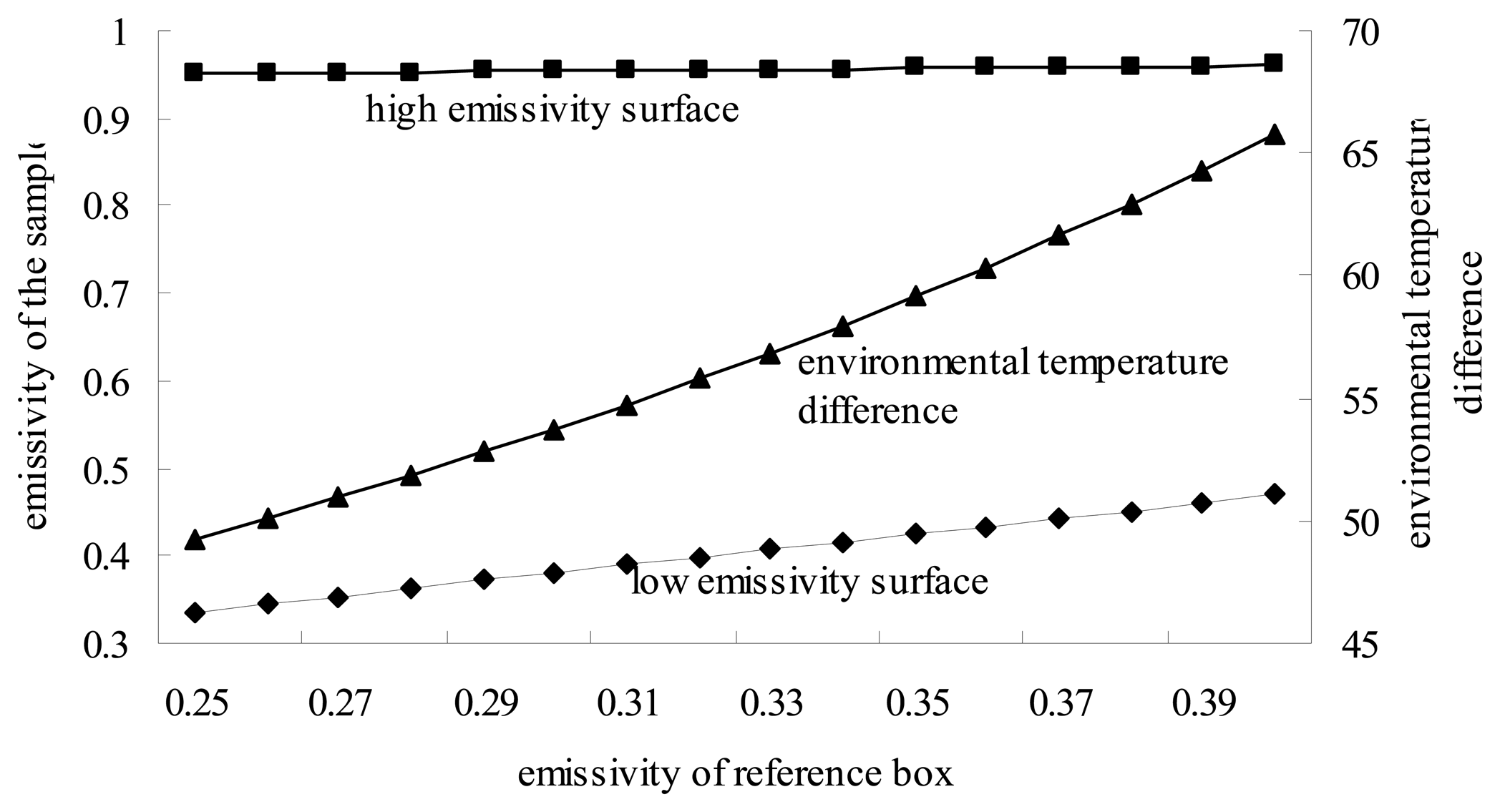
For measuring spatial distribution of surface emissivty and studying scaling effects of it, at same time, providing theoretical and practical foundations for the implement of measuring surface emissivty on airborne or spaceborne, an automatic instument for studying scaling effects of emissivity is designed, with which, the emissivity of various samples has been measured and the sensitivities of four important factors to emissivity calculation: M, the measured apparent radiance; Tenvi, environmental temperature; εr, the emissivity of reference box; Ts, the true temperature of the sample, have been analyzed. It showed that for the sample of low emissivity, small variances of Tenvi and εr would cause large changes in calculated emissivity, therefore, in such cases, more attentions should be paid. Whereas, for the sample of high emissivity (higher than 0.9), the magnitude of variances caused by Tenvi and εr is about 10-3, which often can be ignored in common applications. By means of taking additional measurement outside the cloth chamber, the errors caused by the change of sample's temperature itself was estimated and corrected. According to our experimental data, in some cases, large errors can be generated. At last, the analysis about the effects of resolution on emissivity results showed that emissivity difference linearly depends on the temperature difference of sub-pixels and the more heterogeneity of the surface is, the larger emissivity difference is. Therefore, for the surface of high heterogeneity, emissivity difference must be evaluated and be corrected to fulfill the emissivity scaling.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}