Enhanced TDMA Based Anti-Collision Algorithm with a Dynamic Frame Size Adjustment Strategy for Mobile RFID Readers

Abstract
:1. Introduction
2. Literature Review on Anti-collision Algorithms
2.1. FDD based anti-collision algorithms
2.2. CSMA based anti-collision algorithms
2.3. TDMA based anti-collision algorithms
2.3.1. DCS and Colorwave
- UpSafe: The safe percentage at which to increase max_colors.
- UpTrig: The trigger percentage at which to increase max colors, if a neighboring reader is also switching to a max_colors, if a neighboring reader is also switching to a max_colors higher than that of this reader.
- DnSafe, DnTrig: analogues of UpSafe, UpTrig, except decreasing max_colors.
- MinTimeInColor: The minimum number of timeslots before the Colorwave algorithm will change max_colors again after initialization or changing max_colors.
2.3.2. Timeslot structure of TDMA based anti-collision algorithms
3. Proposed Anti-collision Algorithm for Mobile RFID Readers
3.1. Description of the algorithm
3.2. Analysis of the algorithm
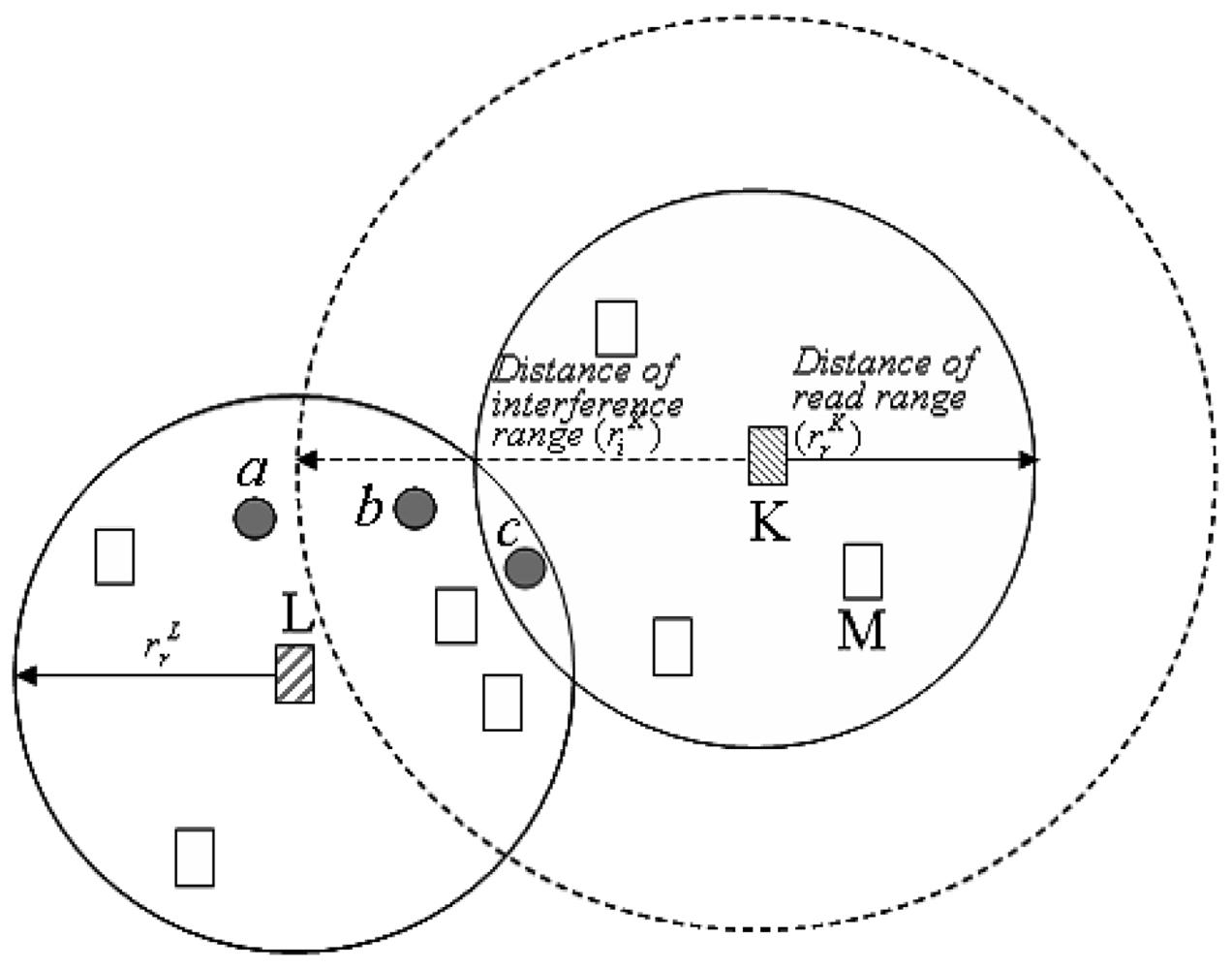
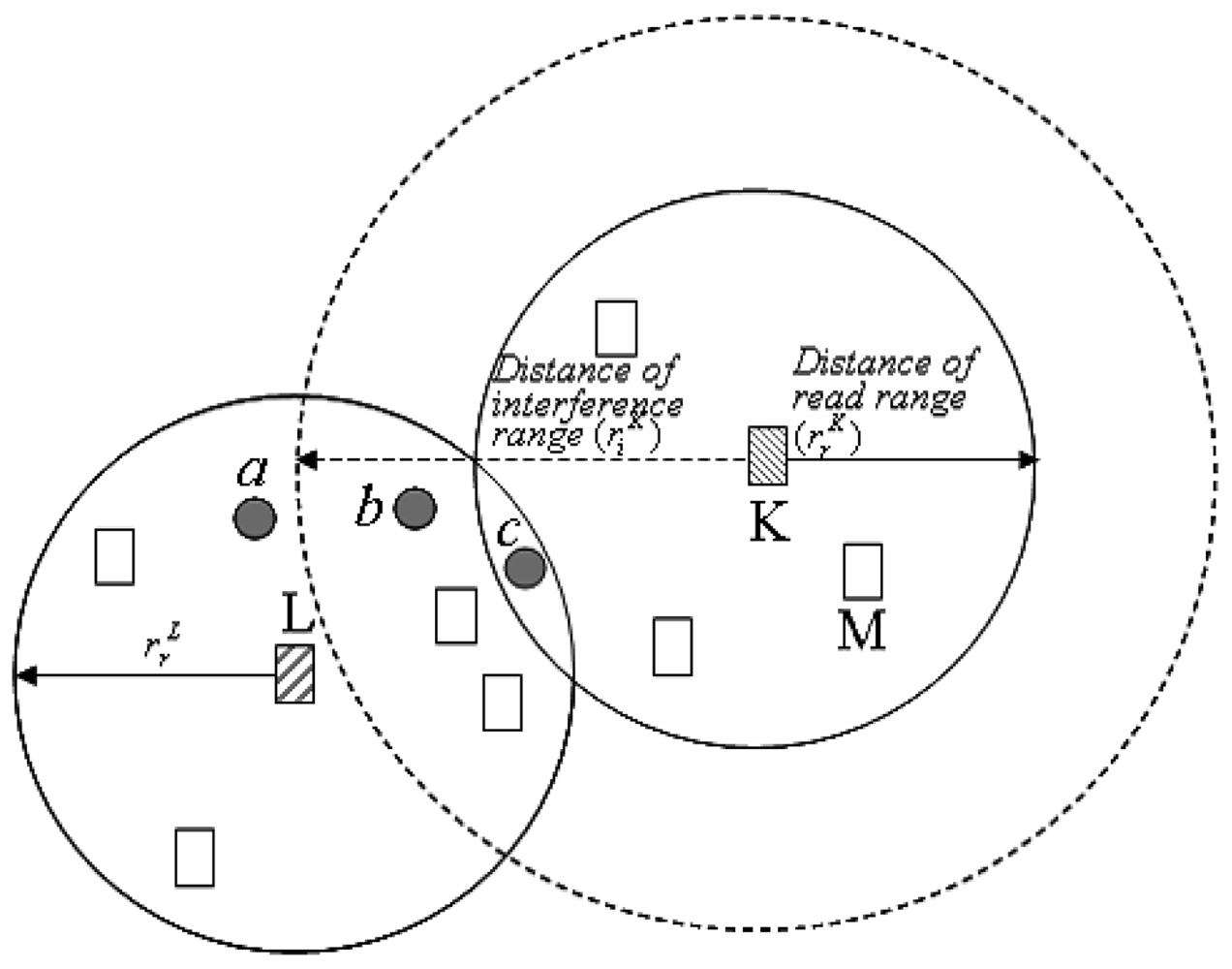
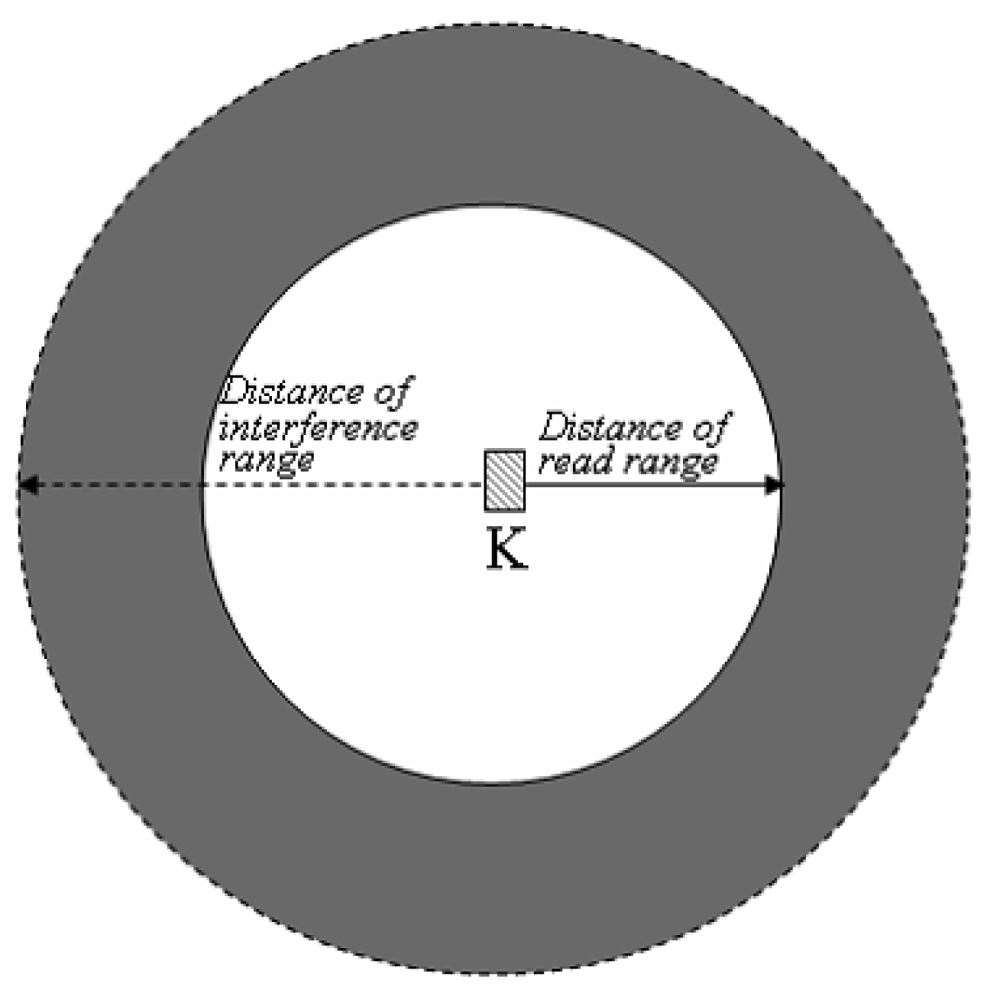
- The estimated number of readers, which located in the range of interference with a reader K, is:
- A frame size of a reader K according to our algorithm is:
- The probability of reader collision in a reader K is:
- The probability of continuous reader collision during δ time period in a reader K is:
- The maximum number of successful transmissions of a reader K during δ time period can be:
- The minimum number of successful transmissions of a reader K during δ time period can be:
4. Environment for Experiments
5. Experimental Results
6. Conclusions
Acknowledgments
References
- McFarlane, D.; Sarma, S.; Chirn, J.L.; Wong, C.Y.; Ashton, K. Auto ID systems and intelligent manufacturing control. Eng. Appl. Artif. Intel. 2003, 16, 365–376. [Google Scholar]
- Curtin, J.; Kauffman, R.J.; Riggins, F.J. Making the “MOST” out of RFID technology: A research agenda for the study of the adoption, usage, and impact of RFID. Inf. Technol. Manage. 2007, 8, 87–110. [Google Scholar]
- Finkenzeller, K. RFID Handbook: Fundamentals and Applications in Contactless Smart Cards and Identification, 2rd Ed. ed; John Wiley & Sons: New York, NY, USA, 2003. [Google Scholar]
- Seidler, C. RFID Opportunities for mobile telecommunication services; ITU-T Lighthouse Technical Paper; ITU-T; 2005. [Google Scholar]
- Birari, S.M. Mitigating the Reader Collision Problem in RFID Networks in Mobile Readers. Master Thesis, Indian Institute of Technology, Mumbai, India, 2005. [Google Scholar]
- Shih, D-H.; Sun, P-L.; Yen, D.C.; Huang, S-M. Taxonomy and survey of RFID anti-collision protocols. Comput. Commun. 2006, 29, 2150–2166. [Google Scholar]
- Engels, D.W.; Sarma, S.E. The reader collision problem. Proceedings of IEEE International Conference on System, Man and Cybernetics, Hammamet, Tunisia; 2002; pp. 641–646. [Google Scholar]
- Waldrop, J.; Engles, D.W.; Sarma, S.E. Colorwave: A MAC for RFID reader networks. Proceedings of the IEEE International Conference on Communications, Anchorage, AK, USA; 2003; pp. 1701–1704. [Google Scholar]
- Waldrop, J.; Engles, D.W.; Sarma, S.E. Colorwave: An Anticollision Algorithm for the Reader Collision Problem. Proceedings of the IEEE International Conference on Communications, Anchorage, AK, USA; 2003; pp. 1206–1210. [Google Scholar]
- ISO/IEC 18000-6. Information technology – Radio frequency identification for item management – Part 6: Parameters for air interface communications at 806 MHz to 960 MHz; 2005. [Google Scholar]
- EPCglobal. EPC Radio-Frequency Identity Protocols Gen. 2 UHF RFID Tag (Class 1): Protocol for Communications at 860MHz–960MHz. 2004. Available online: http://www.autoid.org/sc31/wg3/sg1/WG3SG1_N0318_Gen2_conformance_V1-0-4_OFFICIAL.pdf.
- ETSI. Final draft ETSI EN 302 208-1 V1.1. 2004. Available online: http://www.autoid.org/sc31/wg3/sg1/WG3SG1_N0322_en_30220801v010101p.pdf.
- Birari, S.M.; Lyer, S. PULSE: a MAC protocol for RFID networks. Proceedings 1st International Workshop on RFID and Ubiquitous Sensor Networks, Nagasaki, Japan; 2005; pp. 1036–1046. [Google Scholar]
- Hush, D.R.; Wood, C. Analysis of tree algorithm for RFID arbitration. Proceedings of the IEEE International Symposium on Information Theory, Cambridge, MA, USA; 1998; p. 107. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transmission:: |
| if (timeslot_ID% max_timeslots)==current_timeslot |
| then transmission |
| else idle until (timeslot_ID%max_timeslots)==current_timeslot |
| Collision:: |
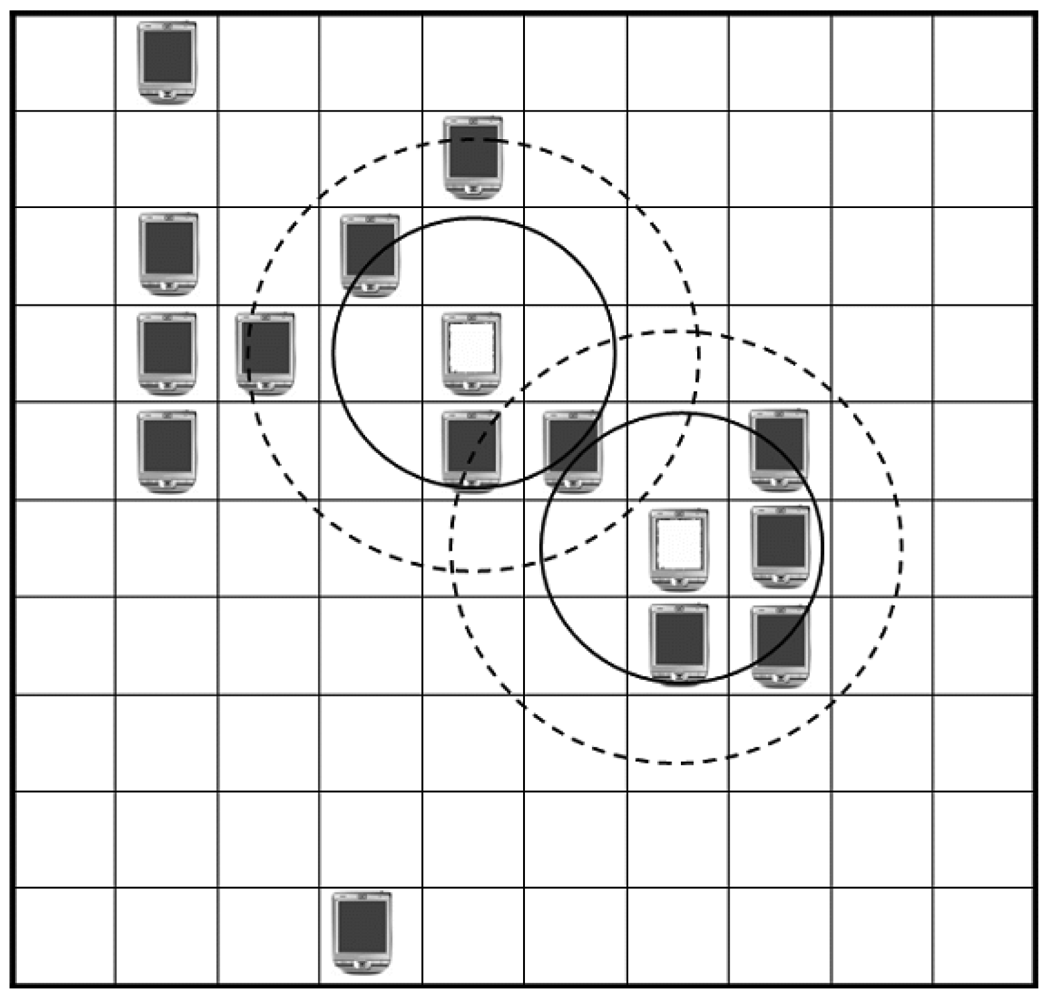
| let α as the number of readers which are in read range |
| let ri and rr as the distances of interference and read range respectively |
| if attempted transmission but experienced collision |
| current_timeslot=random(max_timeslots) |
| broadcast the information stating current_timeslot with synchronization signal |
| Collision Resolution:: |
| if the information received stating current_timeslot if I didn't broadcast in this frame |
| then set clock to be synchronized with broadcaster's |
| current_timeslot=random(max_timeslots) |
| Comparative Factors | Definitions |
|---|---|
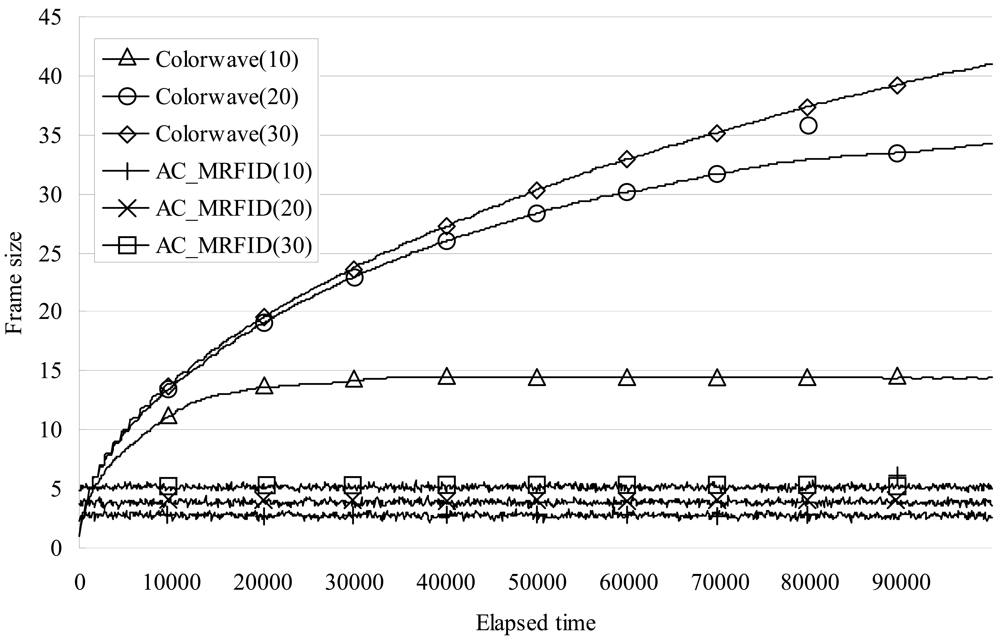
| Frame Size | Average frame size of readers per unit time |
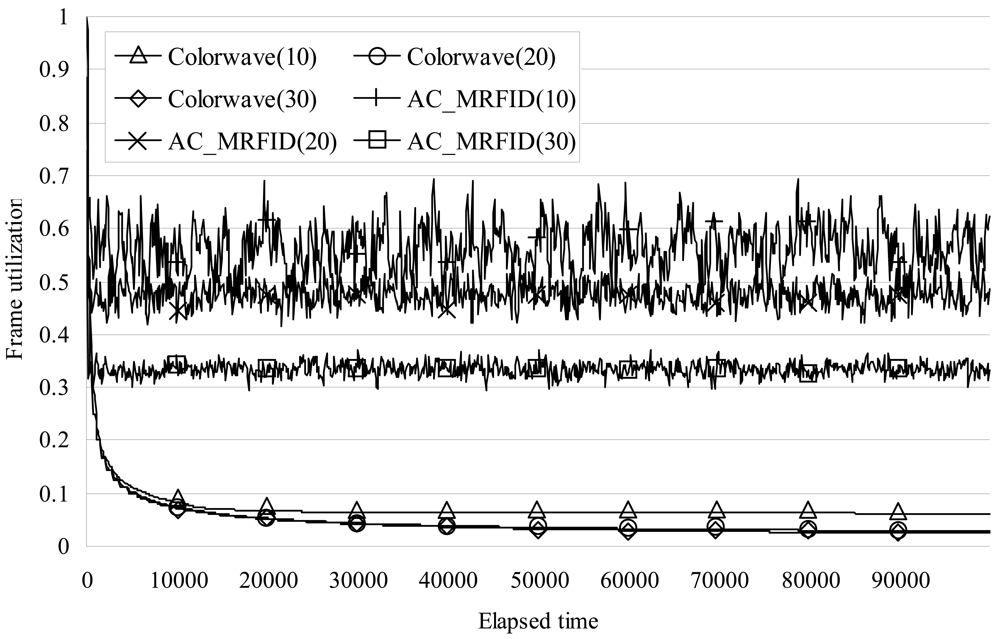
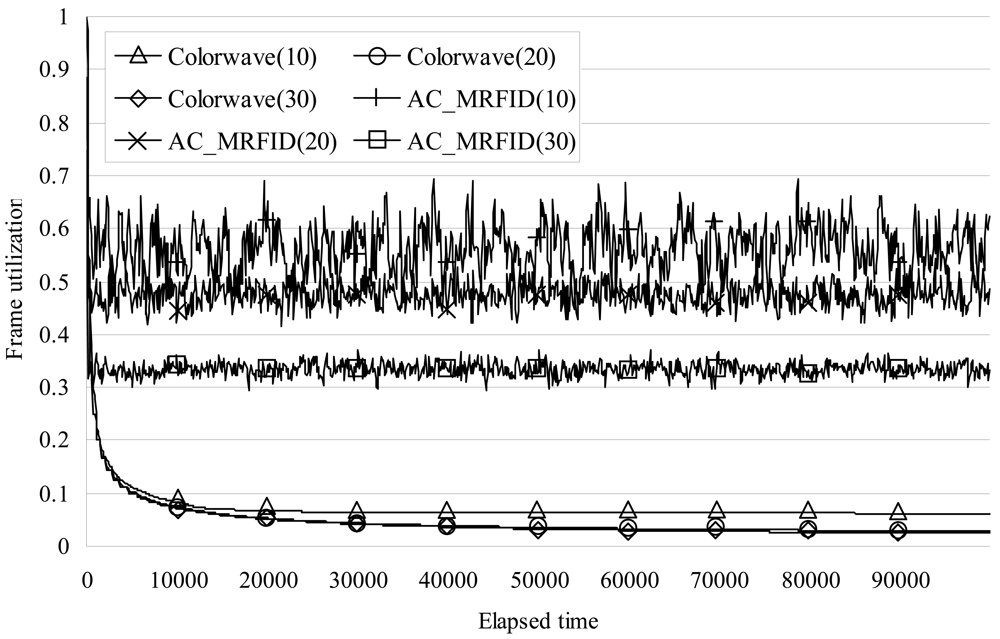
| Frame Utilization | Average ratio of used slots in a frame of readers per unit time (used slots in a frame/the frame size) |
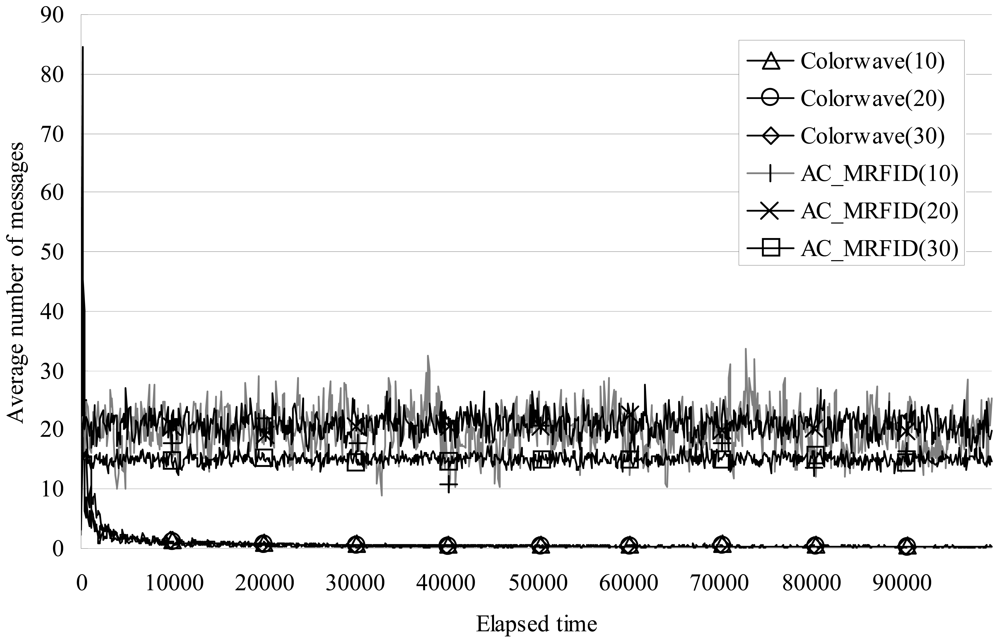
| Broadcasting Messages | Average number of broadcasting messages of a reader for reader to reader communication per unit time |
| Successful Transmissions | Average number of transmissions without collision of readers per unit time |
| Number of Readers | AC_MRFID | Colorwave | Improvements ((AC_MRFID-Colorwave)/Colorwave) |
|---|---|---|---|
| 10 | 26.14 | 6.69 | 290.6% |
| 20 | 14.01 | 4.05 | 245.7% |
| 30 | 9.03 | 3.63 | 148.9% |
| Average | 16.40 | 4.79 | 228.4% |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Shin, K.C.; Park, S.B.; Jo, G.S. Enhanced TDMA Based Anti-Collision Algorithm with a Dynamic Frame Size Adjustment Strategy for Mobile RFID Readers. Sensors 2009, 9, 845-858. https://doi.org/10.3390/s90200845
Shin KC, Park SB, Jo GS. Enhanced TDMA Based Anti-Collision Algorithm with a Dynamic Frame Size Adjustment Strategy for Mobile RFID Readers. Sensors. 2009; 9(2):845-858. https://doi.org/10.3390/s90200845
Chicago/Turabian StyleShin, Kwang Cheol, Seung Bo Park, and Geun Sik Jo. 2009. "Enhanced TDMA Based Anti-Collision Algorithm with a Dynamic Frame Size Adjustment Strategy for Mobile RFID Readers" Sensors 9, no. 2: 845-858. https://doi.org/10.3390/s90200845
APA StyleShin, K. C., Park, S. B., & Jo, G. S. (2009). Enhanced TDMA Based Anti-Collision Algorithm with a Dynamic Frame Size Adjustment Strategy for Mobile RFID Readers. Sensors, 9(2), 845-858. https://doi.org/10.3390/s90200845