RIDES: Robust Intrusion Detection System for IP-Based Ubiquitous Sensor Networks


Abstract
:1. Introduction
- We accentuate the need of an IDS specifically tailored for IP-USN environment,
- Identify possible attack models in IP-USN environment,
- Introduce a dynamic creation of attack-signature identifier so that signature based IDS can be implemented on IP-USN,
- Design an anomaly based IDS for IP-USN environment,
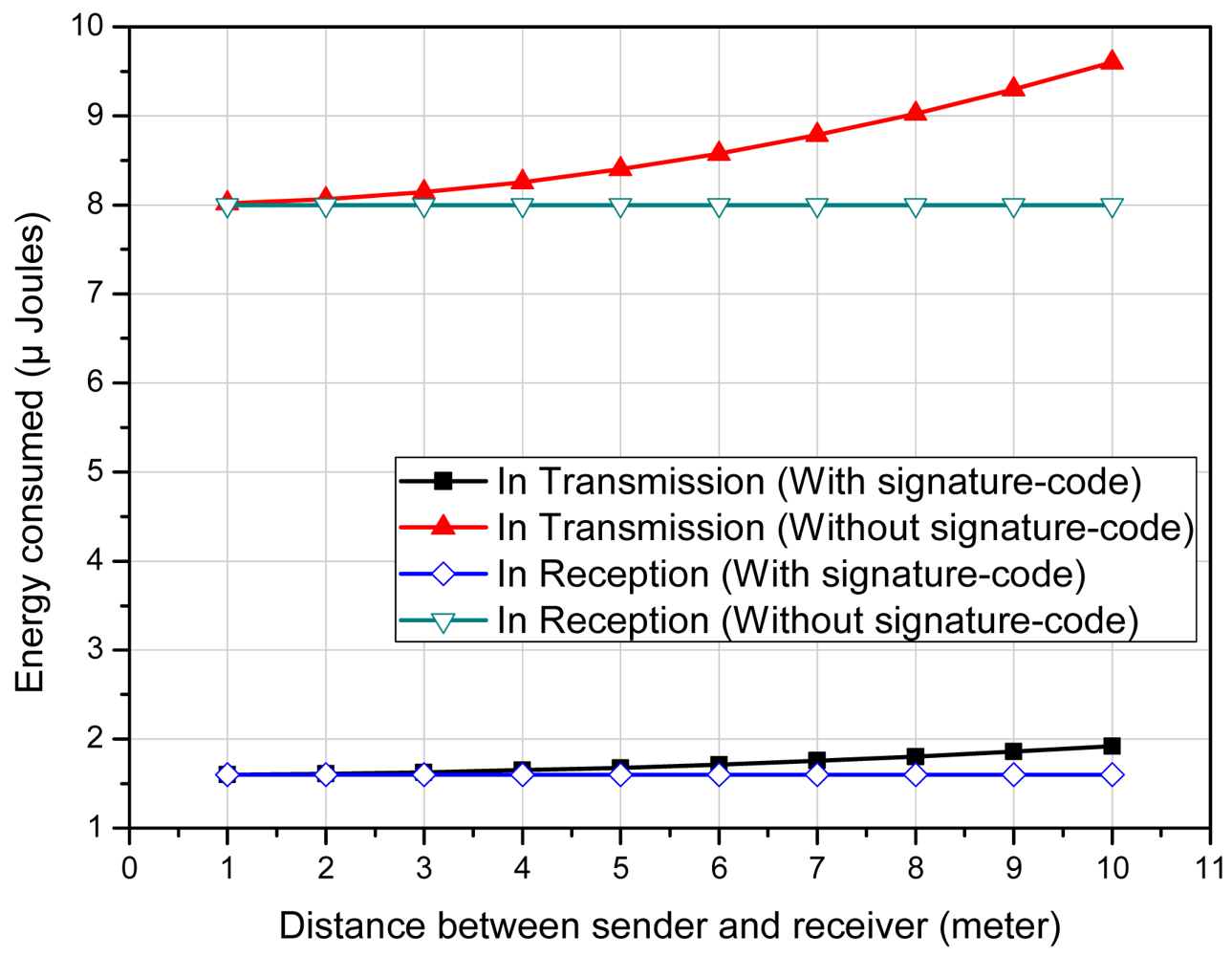
- Provide evaluation results of both coding scheme and anomaly based IDS.
2. Background and Relevant Work
2.1. IP-USN and Related Technologies
2.2. Signature Based Intrusion Detection
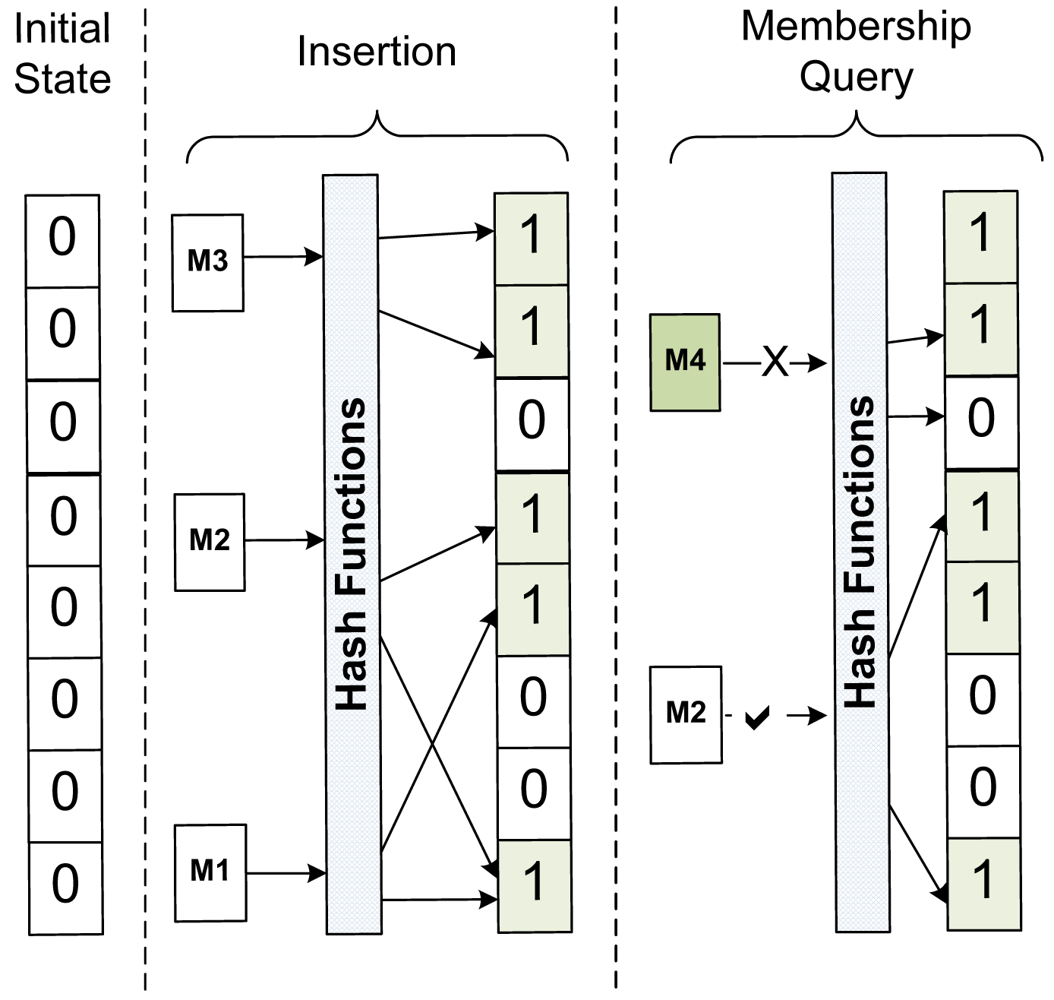
2.2.1. Bloom Filter
2.3. Anomaly Based Intrusion Detection
3. RIDES Architecture
3.1. SCG (Signature-code Generator)
3.1.1. Signature-code
3.1.2. Working of SCG
3.2. NAD (Network Anomaly Detector)
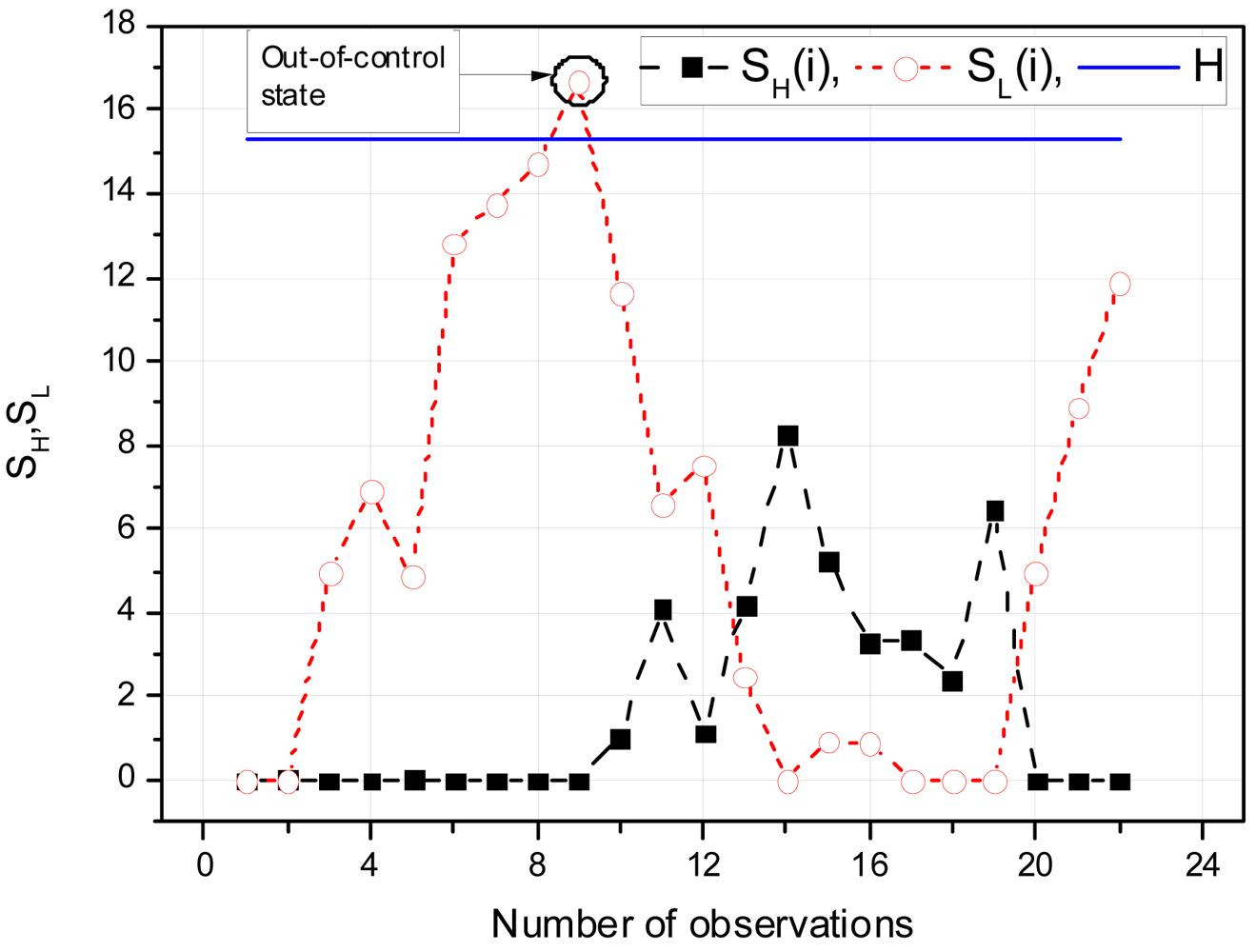
3.2.1. CUSUM Control Charts
3.2.2. Detection Thresholds
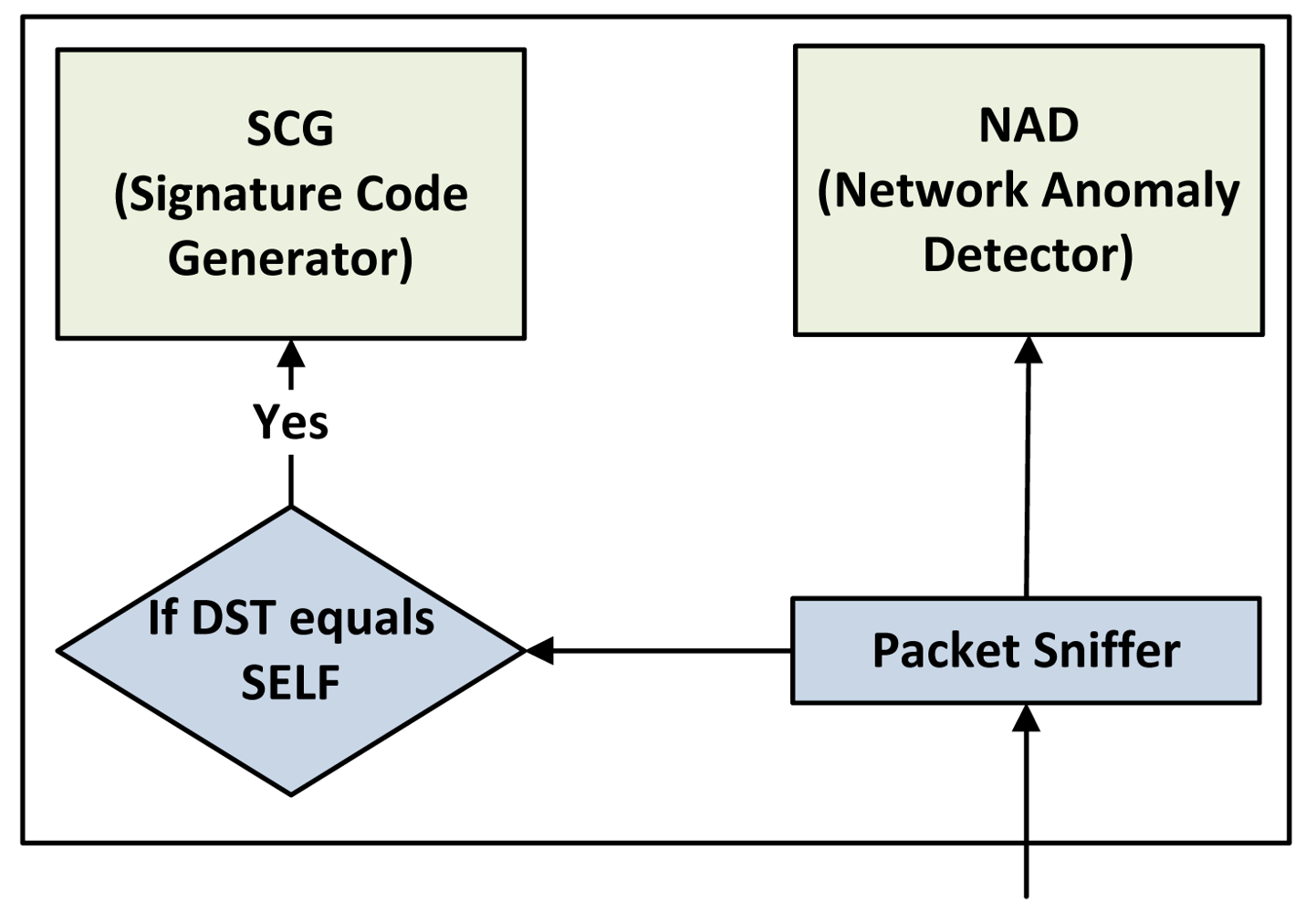
3.2.3. Intrusion Detection and Overall Framework
3.3. Location of Intrusion Detection Components
4. Evaluation of RIDES
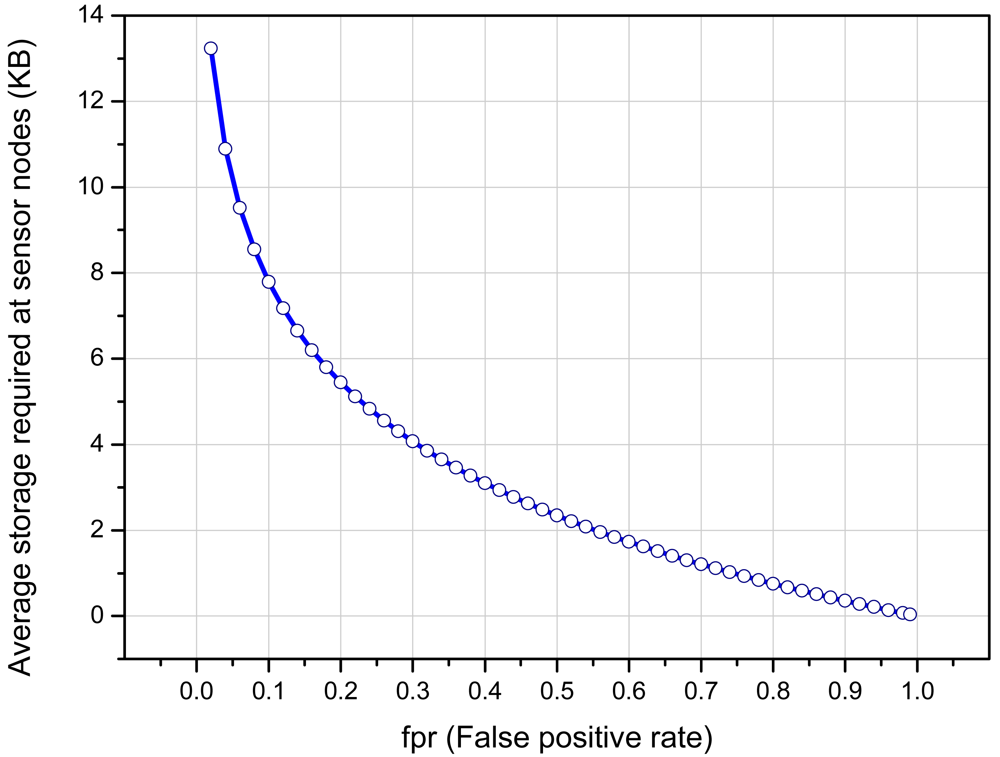
4.1. Performance Evaluation of SCG
4.2. Performance Evaluation of NAD
5. Conclusions
Acknowledgments
References
- Choe, Y.H.; Kelly, T.; Adolph, M. Ubiquitous Sensor Networks; ITU-T Technology Watch Report # 4; ITU: Geneva, Switzerland, 2008. [Google Scholar]
- Culler, D. Embedded Web Services: Making Sense out of Diverse Sensors. 2007. Available online: http://www.sensorsmag.com/sensors/article/articleDetail.jsp?id=430624, accessed April 11, 2009.
- Hui, J.; Culler, D. Extending IP to low-power, wireless personal area networks. IEEE Internet Comput. 2008, 12, 37–45. [Google Scholar]
- Garber, L. Denial-of-service attacks rip the Internet. Computer 2000, 33, 12–17. [Google Scholar]
- CERT Advisory CA-1996-01 UDP Port Denial-of-Service Attack. Available online: http://www.cert.org/advisories/CA-1996-01.html, accessed February 22, 2009.
- Korea Internet Security Center (In Korean). Available online: http://www.krcert.or.kr/, accessed February 22, 2009.
- Axelsson, S. Intrusion detection systems: A survey and taxonomy; Tech. Rep. 99-15; Chalmers University: Göteborg, Sweden, 2000. [Google Scholar]
- Kendall, K. A database of computer attacks for the evaluation of intrusion detection systems. Ph.D. dissertation, Massachusetts Institute of Technology, Massachusetts, USA, 1999. [Google Scholar]
- Montenegro, G.; Kushalnagar, N.; Hui, J.; Culler, D. IPv6 over Low-Power Wireless Personal Area Networks (6LoWPANs): Overview, assumptions, problem statement and goals (RFC 4919); IETF Trust: AMS: Fremont, CA, USA, August 2007. [Google Scholar]
- Dharmapurikar, S.; Lockwood, J. Fast and scalable pattern matching for network intrusion detection systems. IEEE JSAC 2006, 24, 1781–1792. [Google Scholar]
- Anderson, D.; Frivold, T.; Valdes, A. Next-generation intrusion detection expert system (NIDES): A summary; Tech. Rep. SRI-CSL-97-07; SRI International: Menlo Park, CA, USA, 1995. [Google Scholar]
- Vigna, G.; Eckmann, S.; Kemmerer, R. The STAT tool suite. Proceedings of DARPA Information Survivability Conference and Exposition, Hilton Head, SC, USA; IEEE Computer Society, 2000; pp. 46–55. [Google Scholar]
- Kumar, S. Classification and detection of computer intrusions. Ph.D. dissertation, Department of Computer Science: Purdue University, Indiana, USA, 1995. [Google Scholar]
- Lee, W; Stolfo, S.J.; Mok, K. Mining in a data-flow environment: Experience in network intrusion detection. Proceedings of 5th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Diego, CA, USA, August 15-18, 1999; 1999; pp. 114–124. [Google Scholar]
- Ye, N.; Li, X. A scalable clustering technique for intrusion signature recognition. Proceedings of the 2001 IEEE Workshop on Information Assurance and Security, West Point, NY, USA; United States Military Academy, 2001; pp. 5–6. [Google Scholar]
- Stephen, D.L. String Searching Algorithms; In Lectures Notes Series on Computing; World Scientific Publishing Co.: Hackensack, NJ, USA, 1994; Volume 3, pp. 1–256. [Google Scholar]
- Snort – the de facto standard for intrusion detection/prevention. Available online: http://www.snort.org/, accessed February 22, 2009.
- Bloom, B. Space/time trade-offs in hash coding with allowable errors. ACM Commun. 1970, 13, 422–426. [Google Scholar]
- Park, Y. A statistical process control approach for network intrusion detection. Ph.D. dissertation, School of Industrial and Systems Engineering: Georgia Institute of Technology, Atlanta, Georgia, USA, 2005. [Google Scholar]
- Ye, N; Vilbert, S; Chen, Q. Computer intrusion detection through EWMA for autocorrelated and uncorrelated data. IEEE Trans. Reliab. 2003, 52, 75–82. [Google Scholar]
- Stakhanova, N.; Basu, S.; Wong, J. A taxonomy of intrusion response systems. Int. J. Inf. Comput. Secur. 2007, 1, 169–184. [Google Scholar]
- Amin, S.O.; Siddiqui, M.S.; Hong, C.S. A novel IPv6 traceback architecture using COPS protocol. Ann. Telecommun. 2008, 63, 207–221. [Google Scholar]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. Proceedings of the Hawaii International Conference on System Sciences, Maui, Hawaii, USA; 2000; pp. 1–10. [Google Scholar]
- Rabin-Karp string search algorithm. Available online: http://en.wikipedia.org/w/index.php?title=Rabin-Karp_string_search_algorithm&oldid=278622749, accessed April 11, 2009.
- Montgomery, D.C.; Runger, G.C. Applied Statistics and Probability for Engineers, 3rd Ed. ed; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2004. [Google Scholar]
- Montgomery, D.C. Introduction to Statistical Quality Control; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Broder, A.; Mitzenmacher, M. Network applications of bloom filters: A survey. Internet Math. 2004, 1, 485–509. [Google Scholar]
- Fan, L.; Cao, P.; Almeida, J.; Broder, A. Summary cache: A scalable wide-area web cache sharing protocol. IEEE/ACM TON 2000, 8, 281–293. [Google Scholar]
- McCanne, S.; Floyd, S.; Fall, K.; Varadhan, K. Network Simulator – ns-2. Available online: http://www.isi.edu/nsnam/ns/, accessed February 22, 2009.
- Fawcett, T. An introduction to ROC analysis. Pattern Recognition Lett. 2006, 27, 861–874. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gateway/Sink | Rules and Signatures Database |
| Anomaly based Analyzer | |
| IP-based sensor nodes | SCG (Signature-code Generator), Bloom filters |
| NAD (Network Anomaly Detector) |
| Symbols | Meaning |
|---|---|
| m | Size of Bloom filter's bit array |
| n | Number of attack-signatures to be added |
| k | Number of hash functions |
| ρi | Range of the hash function Hi in bits |
| r | Controlled range of the hash functions in bits |
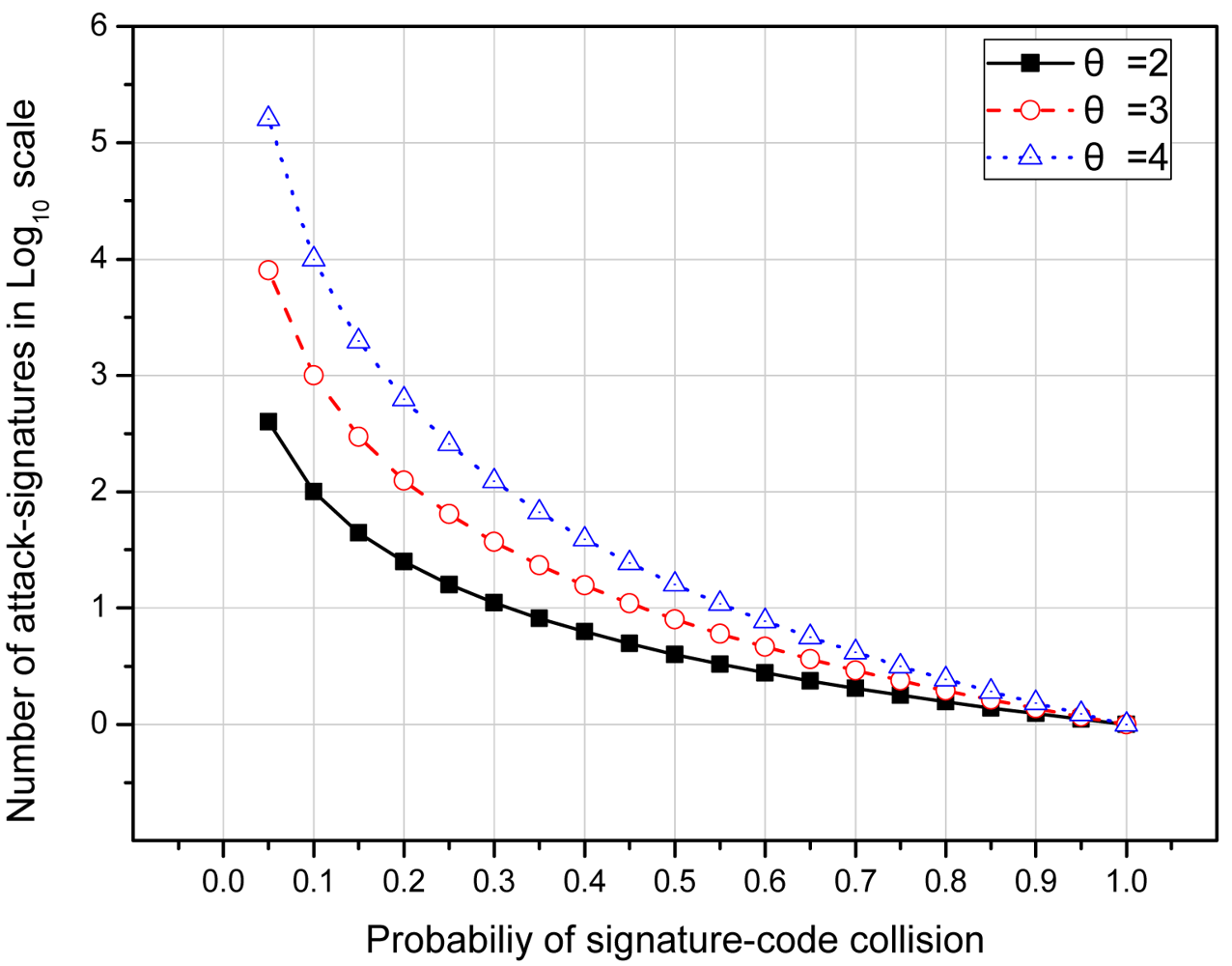
| ⊖ | Number of hash functions used in signature-code generation |
| fpr | False positive rate of Bloom filters |
| pHi | Probability of experiencing a collision in hash function Hi |
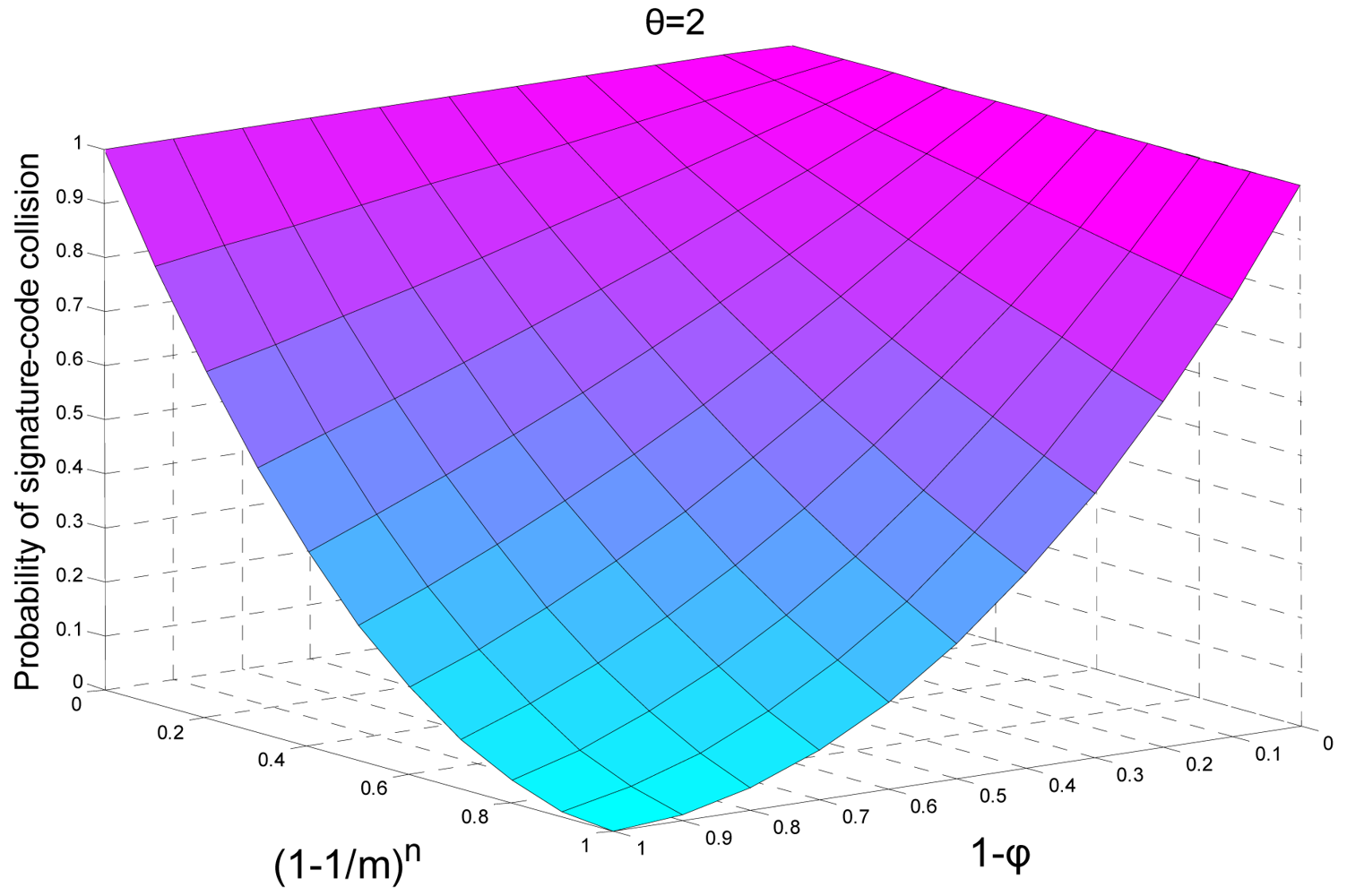
| pS | Probability of signature-code collision |
| PX(x) | Probability of experiencing a collision in a signature-set |
| K | Reference value of CUSUM chart |
| H | Decision interval of CUSUM chart |
| FPP | False positive probability of scoring classifier |
| TPP | True positive probability of scoring classifier |
| Parameter | Value |
|---|---|
| Number of nodes | 25 |
| Number of data generating nodes | 11 |
| Terrain | 50 m × 50 m |
| Topology | Mesh |
| Traffic model | cbr/poisson |
| Beaconing mode | No |
| Maximum data rate | 250 kbps |
| Routing protocol | AODV |
| MAC protocol | 802.15.4 |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Amin, S.O.; Siddiqui, M.S.; Hong, C.S.; Lee, S. RIDES: Robust Intrusion Detection System for IP-Based Ubiquitous Sensor Networks. Sensors 2009, 9, 3447-3468. https://doi.org/10.3390/s90503447
Amin SO, Siddiqui MS, Hong CS, Lee S. RIDES: Robust Intrusion Detection System for IP-Based Ubiquitous Sensor Networks. Sensors. 2009; 9(5):3447-3468. https://doi.org/10.3390/s90503447
Chicago/Turabian StyleAmin, Syed Obaid, Muhammad Shoaib Siddiqui, Choong Seon Hong, and Sungwon Lee. 2009. "RIDES: Robust Intrusion Detection System for IP-Based Ubiquitous Sensor Networks" Sensors 9, no. 5: 3447-3468. https://doi.org/10.3390/s90503447
APA StyleAmin, S. O., Siddiqui, M. S., Hong, C. S., & Lee, S. (2009). RIDES: Robust Intrusion Detection System for IP-Based Ubiquitous Sensor Networks. Sensors, 9(5), 3447-3468. https://doi.org/10.3390/s90503447