Interactive Manipulation of Nonconductive Microparticles in Scanning Electron Microscope by a Virtual Nano-Hand Strategy


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Theoretical Modeling Analysis
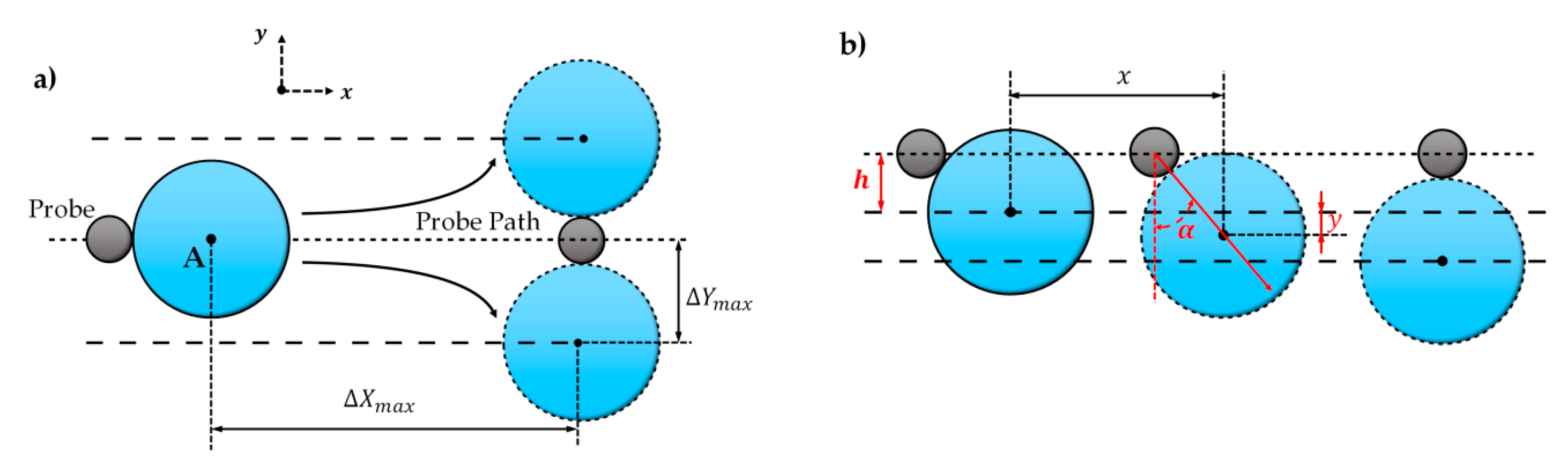
2.1. Theoretical Single-Step Trajectory of a Microparticle
2.2. Virtual Nano-Hand Strategy
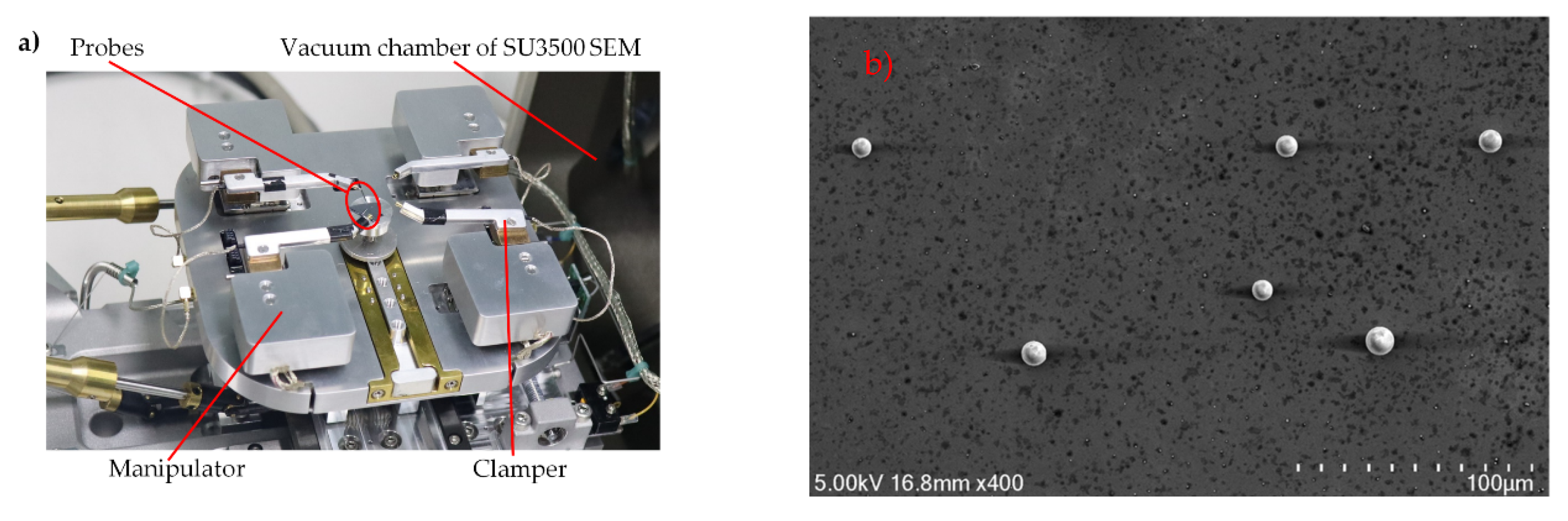
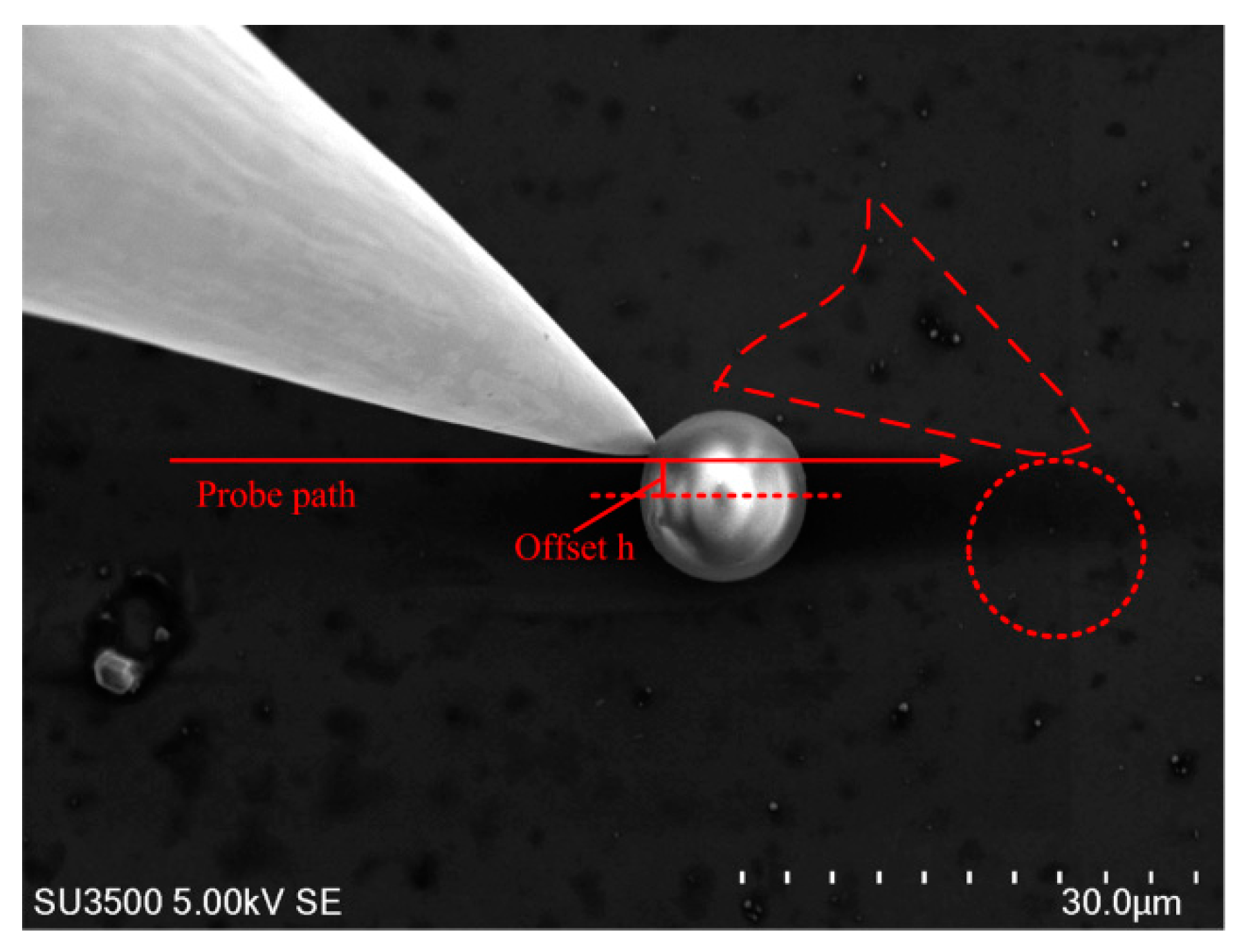
3. Experiments
4. Discussion
4.1. h vs. Microparticle Single-Step Trajectory
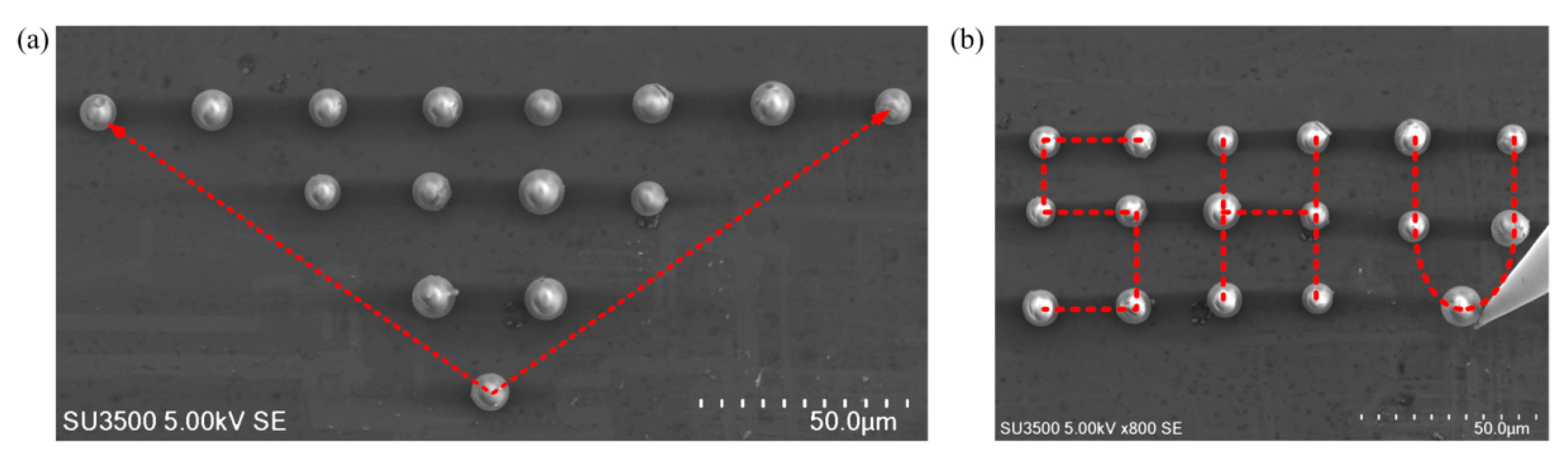
4.2. Virtual Nano-Hand Strategy
4.3. Influencing Factors
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Yuan, S.; Wang, Y.C.; Xi, N.; Yu, H.B.; Jiao, N.D.; Yu, P.; Liu, L.Q. Research progress of robotics based micro/nano-manipulation (in Chinese). Chin. Sci. Bull. 2013, 58, 28–39. [Google Scholar]
- He, B.; Wang, S.; Liu, Y.J. Underactuated robotics: A review. Int. J. Adv. Robot. Syst. 2019, 16, 1–29. [Google Scholar] [CrossRef]
- Junno, T.; Deppert, K.; Montelius, L. Controlled manipulation of nanoparticles with an atomic force microscope. Appl. Phys. Lett. 1995, 66, 3627–3629. [Google Scholar] [CrossRef]
- Guthold, M.; Falvo, M.R.; Matthews, W.G.; Paulson, S.; Washburn, S.; Erie, D.A.; Superfine, R.; Brooks, F.P.; Taylor, R.M. Controlled manipulation of molecular samples with the nanomanipulator. IEEE-ASME Trans. Mech. 2000, 5, 189–198. [Google Scholar] [CrossRef]
- Xie, H.; Régnier, S. High-efficiency automated nanomanipulation with parallel imaging/manipulation force microscopy. IEEE Trans. Nanotechnol. 2012, 11, 21–33. [Google Scholar] [CrossRef]
- Zhang, C.L.; Liu, L.Q.; Wang, Y.C.; Wang, W.X.; Dong, Z.L.; Li, G.Y. Method of controllable 3D manipulation for single virus (in Chinese). Chin. Sci. Bull. 2013, 58, 1456–1462. [Google Scholar] [CrossRef]
- Hou, J.; Liu, L.; Wang, Z.; Wang, Z.; Xi, N.; Wang, Y.; Wu, C.; Dong, Z.; Yuan, S. AFM-based robotic nano-hand for stable manipulation at nanoscale. IEEE Trans. Autom. Sci. Eng. 2013, 10, 285–295. [Google Scholar] [CrossRef]
- Garza, H.H.P.; Ghatkesar, M.K.; Basak, S.; Löthman, P.; Staufer, U. Nano-workbench: A combined hollow AFM cantilever and robotic manipulator. Micromachines 2015, 6, 600–610. [Google Scholar] [CrossRef]
- Shi, C.Y.; Luu, D.K.; Yang, Q.M.; Liu, J.; Chen, J.; Ru, C.H.; Xie, S.R.; Luo, J.; Ge, J.; Sun, Y. Recent advances in nanorobotic manipulation inside scanning electron microscopes. Microsyst. Nanoeng. 2016, 2, 16024. [Google Scholar] [CrossRef] [Green Version]
- Zimmermann, S.; Barragan, S.A.G.; Fatikow, S. Nanorobotic processing of graphene: A platform tailored for rapid prototyping of graphene-based devices. IEEE Nanotechnol. Mag. 2014, 8, 14–19. [Google Scholar] [CrossRef]
- Zhang, Y.L.; Li, J.; To, S.; Zhang, Y.; Ye, X.T.; You, L.D.; Sun, Y. Automated nanomanipulation for nanodevice construction. Nanotechnology 2012, 23, 065304. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shen, Y.; Fukuda, T. State of the art: Micro-nanorobotic manipulation in single cell analysis. Robot. Biomim. 2014, 1, 21. [Google Scholar] [CrossRef]
- Ru, C.H.; Zhang, Y.; Sun, Y.; Zhong, Y.; Sun, X.L.; Hoyle, D.; Cotton, I. Automated four-point probe measurement of nanowires inside a scanning electron microscope. IEEE Trans. Nanotechnol. 2011, 10, 674–681. [Google Scholar]
- Lu, H.; Shang, W.; Hui, X.; Shen, Y. Ultrahigh-precision rotational positioning under a microscope: nanorobotic system, modeling, control, and applications. IEEE Trans. Robot. 2018, 34, 497–507. [Google Scholar] [CrossRef]
- Gong, Z.; Chen, B.K.; Liu, J.; Sun, Y. Robotic probing of nanostructures inside scanning electron microscopy. IEEE Trans. Robot. 2014, 30, 758–765. [Google Scholar] [CrossRef]
- Chen, B.K.; David, A.; Zheng, G.; Rachel, C.; Ren, L.; Yu, S.; Bazett-Jones, D.P. Gene organization: Nano-dissection and sequencing of DNA at single sub-nuclear structures (small 16/2014). Small 2015, 10, 3267–3274. [Google Scholar] [CrossRef]
- Luu, D.K.; Shi, C.; Sun, Y. A Review of nanomanipulation in scanning electron microscopes. In Nanopositioning Technologies; Ru, C., Liu, X., Sun, Y., Eds.; Springer: Berlin, Germany, 2016. [Google Scholar]
- Zhang, Y.L.; Zhang, Y.; Ru, C.H.; Chen, B.K.; Sun, Y. A load-lock-compatible nanomanipulation system for scanning electron microscope. IEEE-ASME Trans. Mech. 2013, 18, 230–237. [Google Scholar] [CrossRef]
- Mick, U.; Eichhorn, V.; Wortmann, T.; Diederichs, C.; Fatikow, S. Combined Nanorobotic AFM/SEM System as Novel Toolbox for Automated Hybrid Analysis and Manipulation of Nanoscale Objects. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4088–4093. [Google Scholar]
- Yong, Y.K.; Moheimani, S.O.; Kenton, B.J.; Leang, K.K. High-speed flexure-guided nanopositioning: Mechanical design and control issues. Rev. Sci. Instrum. 2012, 83, 121101. [Google Scholar] [CrossRef]
- Li, G.Y.; Xi, N.; Chen, H.P.; Pomeroy, C.; Prokos, M. “Videolized” atomic force microscopy for interactive nanomanipulation and nanoassembly. IEEE Trans. Nanotechnol. 2005, 4, 605–615. [Google Scholar] [CrossRef]
- Liu, L.Q.; Luo, Y.L.; Xi, N.; Wang, Y.C.; Zhang, J.B.; Li, G.Y. Sensor referenced real-time videolization of atomic force microscopy for nanomanipulations. IEEE-ASME Trans. Mech 2008, 13, 76–85. [Google Scholar] [CrossRef]
- Song, B.; Sun, Z.Y.; Xi, N.; Yang, R.G.; Cheng, Y.; Chen, L.L.; Dong, L.X. Enhanced non-vector space approach for nanoscale motion control. IEEE Trans. Nanotechnol. 2018, 17, 994–1005. [Google Scholar] [CrossRef]
- Yuan, S.; Wang, Z.D.; Liu, L.Q.; Xi, N.; Wang, Y.C. Stochastic approach for feature-based tip localization and planning in nanomanipulations. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1643–1654. [Google Scholar] [CrossRef]
- Kong, D.D.; Chen, Y.J.; Li, N.; Duan, C.Q.; Lu, L.X.; Chen, D.X. Relevance vector machine for tool wear prediction. Mech. Syst. Signal. Pr. 2019, 127, 573–594. [Google Scholar] [CrossRef]
- Ari, R. Nanomanipulation with the Atomic Force Microscope. In Nanotechnology; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Kim, S.; Ratchford, D.C.; Li, X.Q. Atomic force microscope nanomanipulation with simultaneous visual guidance. ACS Nano 2009, 3, 2989–2994. [Google Scholar] [CrossRef]
- Zhao, W.; Xu, K.M.; Qian, X.P.; Wang, R. Tip based nanomanipulation through successive directional push. J. Manuf. Sci. E-T. Asme 2010, 132, 030909. [Google Scholar] [CrossRef]
- Xu, K.M.; Kalantari, A.; Qian, X.P. Efficient AFM-based nanoparticle manipulation via sequential parallel pushing. IEEE.Trans. Nanotechnol. 2012, 11, 666–675. [Google Scholar] [CrossRef]
- Yuan, S.; Liu, L.Q.; Wang, Z.D.; Wang, Z.Y.; Hou, J. Atomic force microscope nano-operation virtual fixture implementation based on probe positioning. J. Mech. Eng. 2014, 50, 142–147. [Google Scholar] [CrossRef]
- Ye, X.T.; Zhang, Y.; Ru, C.H.; Luo, J.; Xie, S.R.; Sun, Y. Automated pick-place of silicon nanowires. IEEE Trans. Autom. Sci. Eng. 2013, 10, 554–561. [Google Scholar] [CrossRef]
- Yang, Q.; Ma, L.; Yang, B.; Ding, H.Y.; Chen, T.; Yang, Z.; Sun, L.N.; Fukuda, T. Method of picking up carbon nanotubes inside scanning electron microscope. Acta Phys. Sin. 2018, 67, 136801. [Google Scholar]
- Decossas, S.; Mazen, F.; Baron, T.; Bremond, G.; Souifi, A. Atomic force microscopy nanomanipulation of silicon nanocrystals for nanodevice fabrication. Nanotechnology 2003, 14, 1272–1278. [Google Scholar] [CrossRef]
- Cao, N.; Xie, S.R.; Wu, Z.Z.; Liu, M.; Li, H.Y.; Pu, H.Y.; Luo, J.; Gong, Z.B. Interactive micromanipulation of picking and placement of nonconductive microsphere in scanning electron microscope. Micromachines 2017, 8, 257. [Google Scholar] [CrossRef] [PubMed]
- Dietzel, D.; Feldmann, M.; Herding, C.; Schwarz, U.D.; Schirmeisen, A. Quantifying pathways and friction of nanoparticles during controlled manipulation by contact-mode atomic force microscopy. Tribol. Lett 2010, 39, 273–281. [Google Scholar] [CrossRef]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Cheng, K.; Qin, X.; Wei, Z.; Borom, B.; Su, W.; Chen, J.; Feng, Y.; Wang, T.; Rao, J. Interactive Manipulation of Nonconductive Microparticles in Scanning Electron Microscope by a Virtual Nano-Hand Strategy. Micromachines 2019, 10, 670. https://doi.org/10.3390/mi10100670
Liu M, Cheng K, Qin X, Wei Z, Borom B, Su W, Chen J, Feng Y, Wang T, Rao J. Interactive Manipulation of Nonconductive Microparticles in Scanning Electron Microscope by a Virtual Nano-Hand Strategy. Micromachines. 2019; 10(10):670. https://doi.org/10.3390/mi10100670
Chicago/Turabian StyleLiu, Mei, Kai Cheng, Xiangzheng Qin, Zhenzhong Wei, Brandon Borom, Weilin Su, Jinbo Chen, Yunpeng Feng, Tao Wang, and Jinjun Rao. 2019. "Interactive Manipulation of Nonconductive Microparticles in Scanning Electron Microscope by a Virtual Nano-Hand Strategy" Micromachines 10, no. 10: 670. https://doi.org/10.3390/mi10100670
APA StyleLiu, M., Cheng, K., Qin, X., Wei, Z., Borom, B., Su, W., Chen, J., Feng, Y., Wang, T., & Rao, J. (2019). Interactive Manipulation of Nonconductive Microparticles in Scanning Electron Microscope by a Virtual Nano-Hand Strategy. Micromachines, 10(10), 670. https://doi.org/10.3390/mi10100670