1. Introduction
Several different grippers for microscopic objects have already been developed for commercial use. For example, the company FemtoTools offers grippers of the electrostatically driven FT-G series [
1] which is presented scientifically by Beyeler [
2]. SmarAct GmbH offers the piezo-driven gripper SG-06 [
3]. In recent scientific works, other grippers with electrostatic [
4] or piezomechanical [
5] actuator principles have been presented. Hoxhold [
6] and Garcés-Schröder et al. [
7] present microgrippers with actuators made of a shape memory alloy (SMA). In particular, the latter design is intended for the handling of biological samples. A comprehensive list of actuation principles for microgrippers is given by Dochshanov et al. [
8], mentioning electrostatic, thermal, electromagnetic, and piezoelectric as the most common examples.
In the context of their application in liquid environments and their use in combination with electrophysiological measurements, the mentioned examples have the disadvantage of being electrically driven. Electromagnetic fields could exert disturbing influences on very weak electrophysiological signals (in the picoampere range) from cells and organoids. Thermomechanical actuator principles, such as the designs described by Hoxhold [
6] and Garcés-Schröder et al. [
7] (SMA), or by Chronis et al. [
9] (thermal expansion) have the additional disadvantage of heat dissipation into their surroundings, which could also influence the samples. If submerged into an electrolyte solution surrounding a sample, some electrically driven actuators can also short circuit. Fluidic actuators, whether pneumatic or hydraulic, are promising because they do not show any heat development worth considering, and do not require electrical components in the vicinity of the sample. A pneumatic microgripper has been developed [
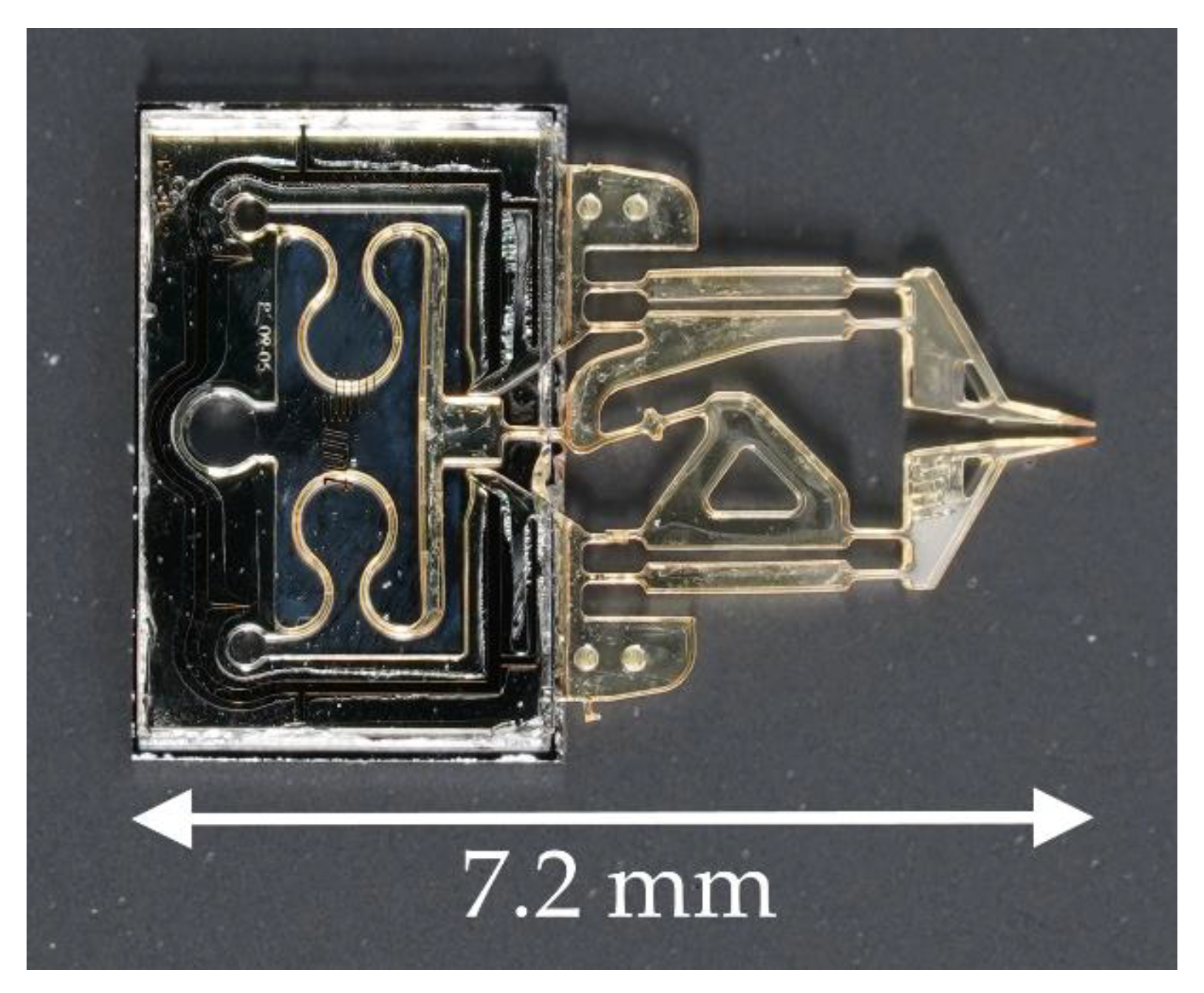
10] in which the gripper’s arms perform a rotational movement similar to a pair of tweezers. This could be disadvantageous for a gripped cell cluster as it could be forced out of the tilted gripper jaws. This problematic tilting can be eliminated by moving the gripper jaws in parallelogrammatic elastic hinge structures, as demonstrated by Hoxhold [
6]. This pneumatic microgripper design can be seen in
Figure 1. The following article focuses on a successor of that design.
To avoid contamination, everything that comes into contact with a biological sample must be either sterilizable or easily replaceable. In the case of single-use objects, economic mass production should be possible. The previous design [
6] consists of compliant SU-8 structures processed on a silicon wafer with glass adhered to the top. The pneumatic actuator consists of meandering SU-8 structures that are closed off by the silicon at the bottom and by the glass at the top. This forms a bellows structure, where the meandering part of the SU-8 can slide between the silicon and the glass to generate a displacement and/or a force when applied with either pressure or vacuum. Although it should allow batch production, the process could not be reproduced without adjustments that prevent a full batch process. Originally, the bellows structures were closed on wafer level by adhesion of the glass wafer followed by chip separation. The dicing sludge from the separation, however, can restrict the bellows’ movability if the sludge cannot be removed completely. The sludge has to be flushed out of the actuator element, something that is difficult to achieve when the glass cover is already in place. For a better result, dicing and rinsing with ultrasound has to be carried out first. The glass cover must then be positioned and glued on each microgripper individually.
The measurement of the gripping force is another important aspect in a handling system for cell samples. Forces applied to very small samples of muscle tissue were measured for mechanical characterization using a force sensor featuring compliant, parallelogrammatic silicon structures [
11]. The deflection of those structures was determined via piezo resistors that are doped into the silicon. As with the actuators, a non-electric function is preferable for patch clamping. This means that common principles featuring Wheatstone bridges made of piezo resistors presented in various works [
6,
11,
12,
13] are not suitable. Gripping arms designed as flexible cantilevers are shown by Alogla et al. [
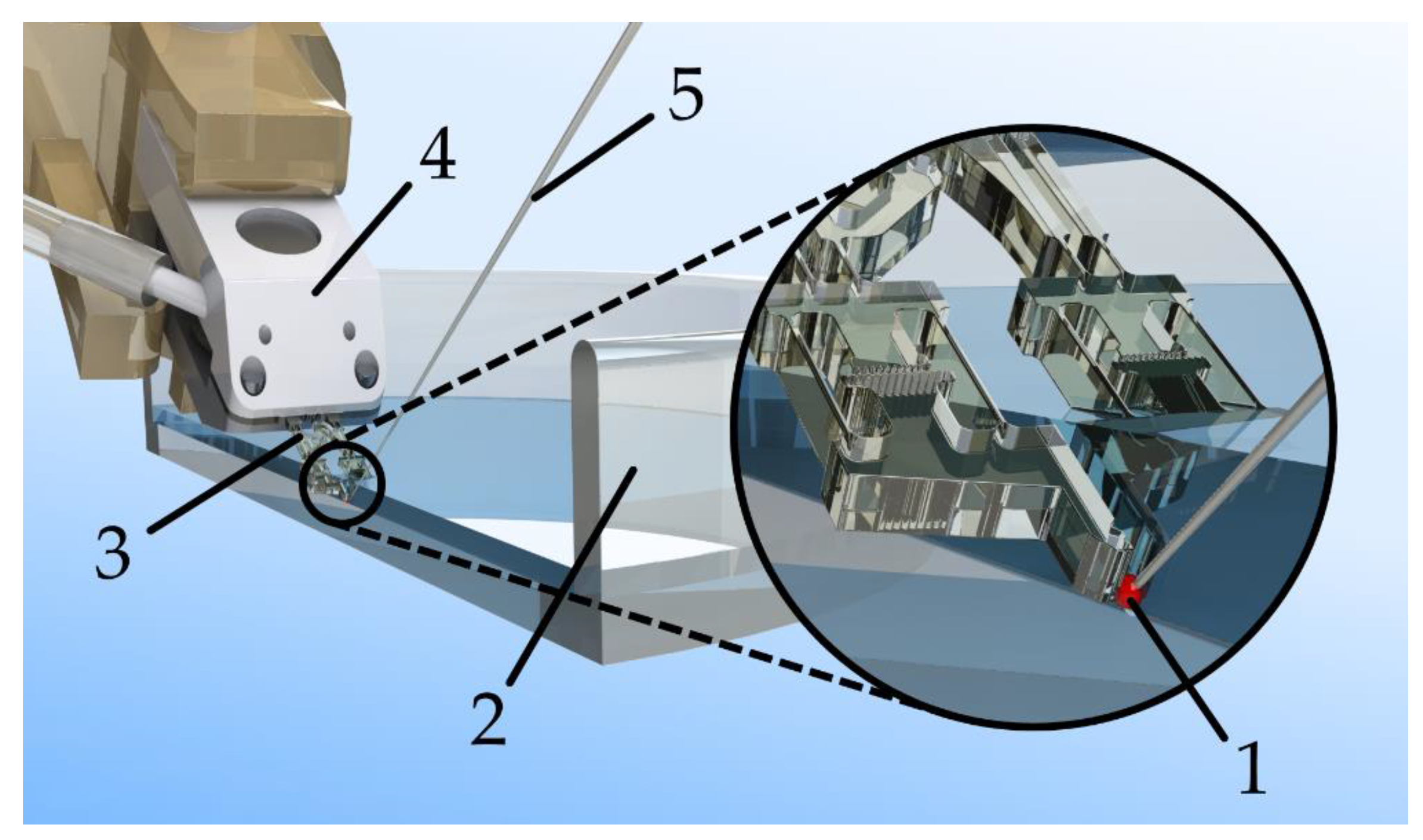
10]. Their deformation can be detected by the reflection of a laser beam and used to determine the momentary gripping force. While this approach keeps electronic components away from the sample, the integration of laser equipment would increase the potential handling system’s overall complexity and, therefore, its cost. This can be avoided as shown below. This article describes a new single-use gripper to be used in a handling system that allows precise positioning and holding of small samples of cell clusters in addition to the patch clamp technique. During patch clamping, the electrical currents through cell membranes are measured in the picoampere range. Common approaches to cell-handling use the suction of a pipette to hold samples, however, prolonged exposure to suction during measurement could affect the sample’s physiology. By contrast, the samples in this new handling system will be held and moved by utilizing a microgripper.
In order to meet these requirements, this article presents a modification of the pneumatic design by Hoxhold [
6], which not only allows batch production, but also greatly simplifies the manufacturing process by shifting much of the recurring complexity of the gripper’s manufacturing process into a reusable fixture. In addition, the new design is equipped with a sensor system that enables the determination of the momentary gripping force utilizing the system’s microscope.
The use of such a handling system should enable researchers to work with larger aggregates of cells without damaging them. A conceptual sketch of the gripper in the planned application can be seen in
Figure 2.
3. Experiments
3.1. Mechanical Characterization of the Gripping Sensors
In order to evaluate the gripping force sensors and validate their simulation, dummy grippers with immovable transmissions were manufactured. These dummies allow investigations in the test stand without influence on the force sensors due to the compliance of the transmission or the actuator. A commercially available force sensor (KD78, ME-Meßsysteme, Henningsdorf, Germany) is mounted on a linear drive. The sensor can measure forces in a single direction which is parallel to the movement of the linear drive. By moving the axis, a measuring tip attached to the KD78 can be pushed against the parallelogrammatic structures of the gripping force sensor, causing a deflection of the sample in line with the KD78. Meanwhile, the effective force is measured by the KD78 and the deflection distance is shown by how far the linear axis moves.
To determine the zero point of the displacement, the contact point between the measuring pin and the gripping force sensor is determined by gradually closing the distance between the probing tip and the sample until a small force can be measured. Then, they are moved away from each other until the force vanishes. It is always started without force, and the distance to the maximum applied force is recorded twice in both directions. Since the KD78 itself also has a force-dependent deflection of about 0.181 µm/mN, this has to be mathematically compensated for during the evaluation.
The measured values are shown in
Table 1. Here, it can be seen that the force sensor systems examined have sensitivities of 3.182–3.428 µm/mN with an average of 3.337 µm/mN. The standard deviation is 0.088 µm/mN. Sensitivities close to 3.3 µm/mN are expected from the simulations and confirmed by the samples. The deviations can be explained by fluctuations in the SU-8 layer thickness, at which fluctuations of 6% or more are possible in extreme cases.
With coefficients of determination R² between 0.9932 and 0.9960, the measured values show good linearity between the effective force and the deflection. Offsets of between −0.063 and −1.187 mN can be measured. These are likely induced by the contact process, which can leave a small gap between the measuring pin and the sample.
3.2. Exemplary Microgripper Experiments
In order to demonstrate that the gripping force sensors also function in practical applications, the force sensors of two complete grippers with actuators, transmissions, sensors, and optical readout structures are examined. Since the two gripper jaws of each gripper are symmetrically equipped with force measurement structures, each side (Side 1, Side 2) of the gripper has its own independent measurement.
3.2.1. Force Sensor Calibration
First, the force sensors are calibrated to determine the individual offset and sensitivity of each respective sample. The most crucial aspect is to enable the user to derive the effective gripping force from image recordings of the sensors. For this purpose, the tactile tip on the KD78 force sensor is used again in the setup of the previous measurement. The front part of one of the gripper jaws is touched, and a force is applied to the gripper jaw via the movement of the linear drive. This force is increased until the parallelogrammatic gripping force sensor has reached its maximum deflection. Then, the linear drive returns to the starting position. During the deflection phase, images of the reading structures are recorded and stored at regular intervals. The arms and the transmission of the gripper are also deflected, but in this case, this does not have to be taken into account as the deflection of the gripping force sensor is decoupled from the rest. The camera (Technisch Industrielles Industrie Mikroskop, Scientific Precision Instruments GmbH, Nieder-Olm, Germany) used records with a resolution of 768 × 576. When the recorded images are combined with the measured forces, the relationship between the deflection of the force sensors and the effective force can be read in the image. For this purpose, structures of a known length and the visible deflection of the force sensors are manually measured in the image. From this, the actual deflection can be calculated in µm.
The resulting force–deflection diagrams can be seen in
Figure 9. The force sensors of gripper have sensitivities of 3.650 µm/mN on side 1 and 3.077 µm/mN on side 2. The sensitivities of the sensors of gripper B are 3.241 µm/mN on side 1 and 3.346 µm/mN on side 2. The offsets can also be determined.
3.2.2. Sample Interaction
After calibration, an object—in this case, a generic rubber piece—is held between the gripper jaws (
Figure 10). The object is intentionally slightly larger than the maximum unloaded distance between the gripper jaws to preload the force-sensing structures and show their reaction to the full scale of the pressure. The system pressure for actuator control is varied: from the measured maximum 0.12 MPa (minimum gripping force) to the measured minimum −0.06 MPa (maximum gripping force) and back. The process is repeated for each gripping force sensor on a gripper, and the microscope camera is always directed at the side to be examined. The air pressure is measured with a pressure sensor (DP-100, Panasonic, Kadoma, Osaka, Japan) along the supply line to the gripper. The actual air pressure in the actuator element is significantly lower as a constant airflow passes through the actuator when pressure is applied. This is due to the leakage of the actuator element, which is an inherent property of the design concept. The deflections of the gripping force sensors can be read out from the image. In order to help the user, specialized recognition structures are integrated into the gripping force sensors. They function like the vernier scale of a caliper: the opposing teeth serve as markers with defined distances and immediately allow a discrete determination of the sensor deflection on the basis of the microscope image without further aids. For comparison, the deflection is also determined by measuring the image as described during calibration. Examples of the values being read out in this way are shown for one of the sides of a gripper against the system pressure in
Figure 11.
With the help of the previously determined sensitivities and offsets, the applied forces can be determined from the read deflections. It is shown that the two microgrippers can build up maximum force differences in a range of 3.0–5.7 mN in the case examined. All values are shown in
Table 2.
The two reading procedures show certain differences with regard to the determined deflections. On average, the absolute differences between the methods are 0.20 mN (gripper A, side 1), −0.21 mN (gripper A, side 2), −1.23 mN (gripper B, side 1), and 0.41 mN (gripper B, side 2). The standard deviations are 0.82 mN (gripper B, side 2) or less. These values appear acceptable in light of the fact that the resolution of the recorded camera images shows approximately 4 µm per pixel which is more than 1 mN with the given sensitivites.
The readout structures divide the maximum deflection range of 100 µm into 20 steps of 5 µm length, each resulting in force differences of about 1.5 mN per step. This discretization can be seen clearly in the values of the reading structures. The values form steps in the graph. With finer structures, it would be possible to increase the resolution of the reading structures, provided that the resolution of the microscope camera is also increased. As SU-8 can be processed with a high aspect ratio, visually distinguishable test structures of 10 µm could be produced in the same process. Vernier scale readout structures in that size should be able to determine displacements of around 1 µm. The sensitivity can also be adjusted by a different dimensioning of the elastic force measurement springs. The existing spring elements are obviously designed for significantly higher forces than the actuator elements can provide. The low forces of the actuators can mainly be attributed to the design-related leakage, which prevents the full system pressure from building up in the actuator. This leakage is intrinsic to the actuation principle where two rigid planes (silicon and glass) have a compliant moving structure (SU-8) in between. The air pressure has to be trapped inside the actuator, but it can escape through the gap between the moving structures and the planes. Removing this gap would impede the actuator’s movement.
4. Conclusions
This paper introduced a new design for an SU-8-based microgripper, which is pneumatically driven and offers the possibility of image-based gripping force measurement. Perhaps most importantly, the gripper is realized by a very simple manufacturing process that allows low-cost batch production. This was achieved by shifting technical functions and, thus, manufacturing complexity into a reusable mounting. This turns the central gripper component into a disposable component that can be produced economically in bulk with just a single photolithography mask.
Simulated and experimental investigations were carried out on the force-measuring structures used in the microgripper. The good linearity of these sensors was confirmed, and the controllability of the design parameters was ascertained. Even if the gripping force of the gripper is quite low, the functionality of the present design could be demonstrated in practice. For illustration,
Figure 12 shows the gripping procedure on a rubber test body. The application of novel image-based force measurement structures was also successfully demonstrated.
In future works, the actuator element of the gripper will be further improved to allow greater gripping forces and to avoid design-dictated leakage. It would also be useful to further improve the readout process of the force measurement structures.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}