Design and Characteristic Analysis of a MEMS Piezo-Driven Recirculating Inkjet Printhead Using Lumped Element Modeling

Abstract
:1. Introduction
2. Materials and Methods
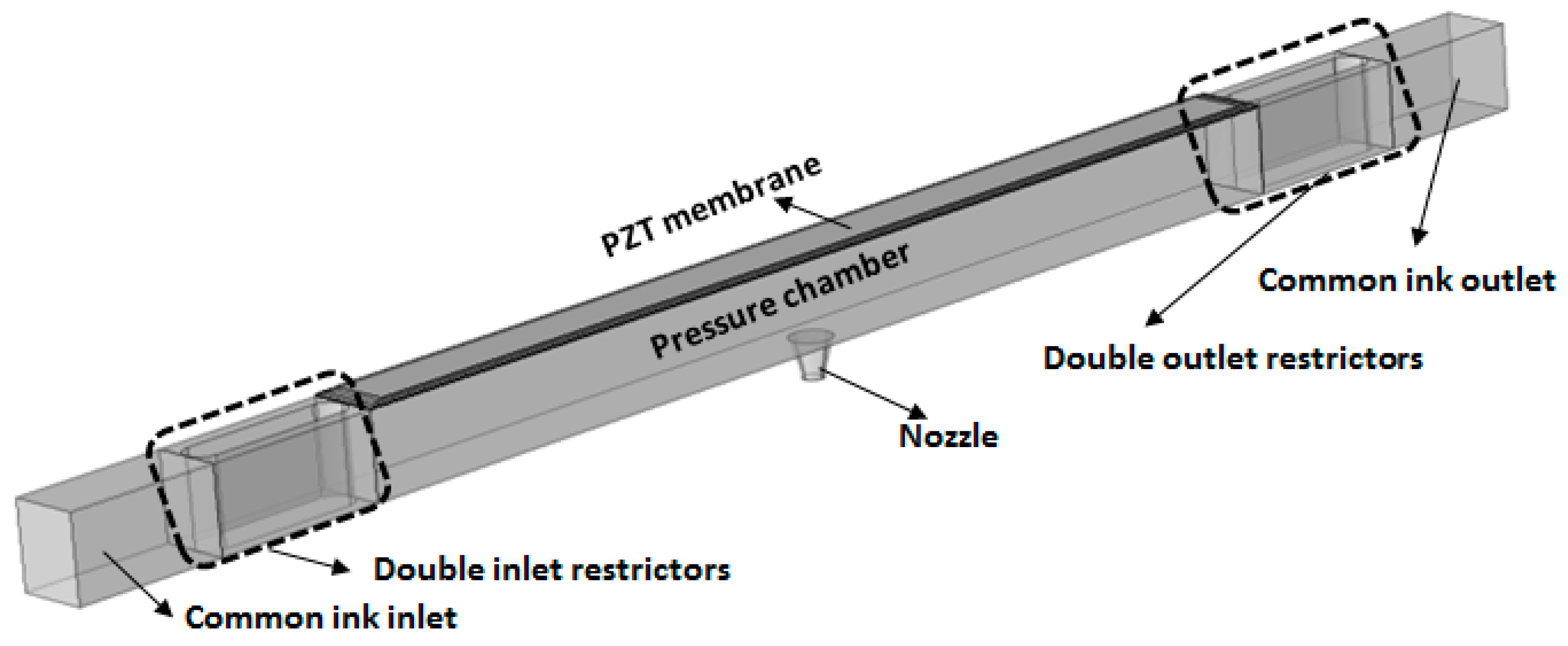
2.1. Proposed Design
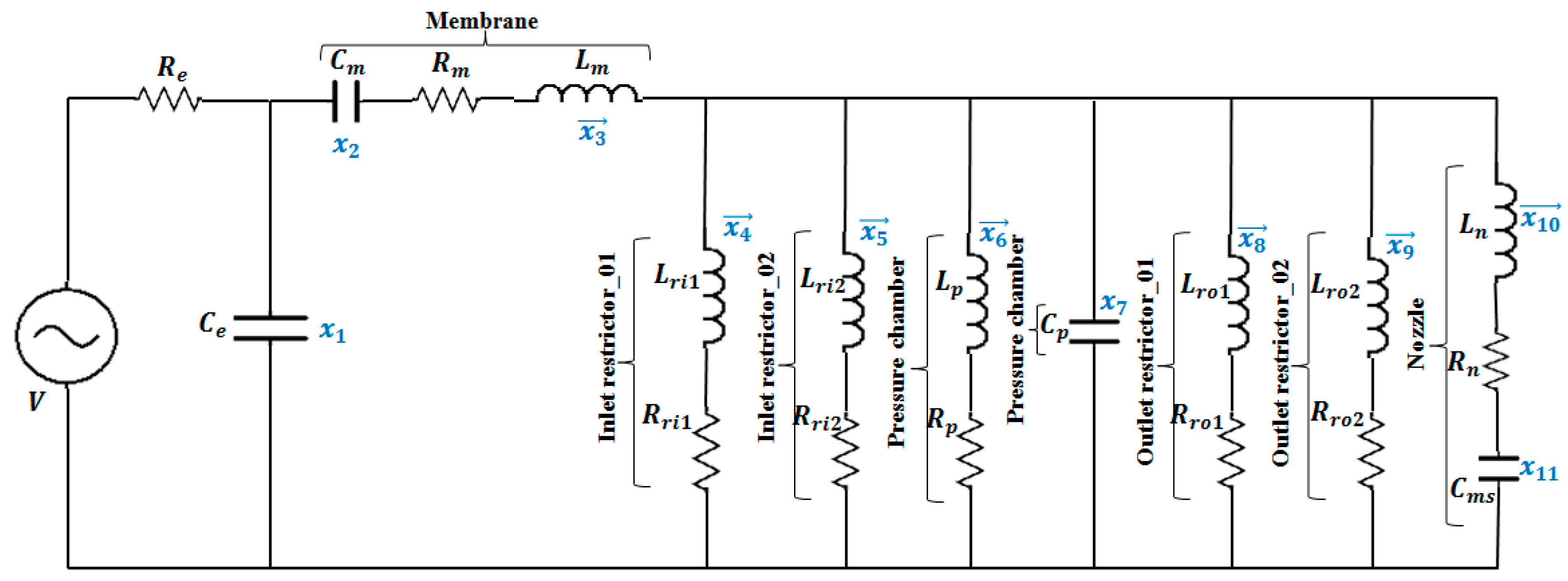
2.2. Lumped Element Model
2.3. FEM Simulations
3. Results and Discussion
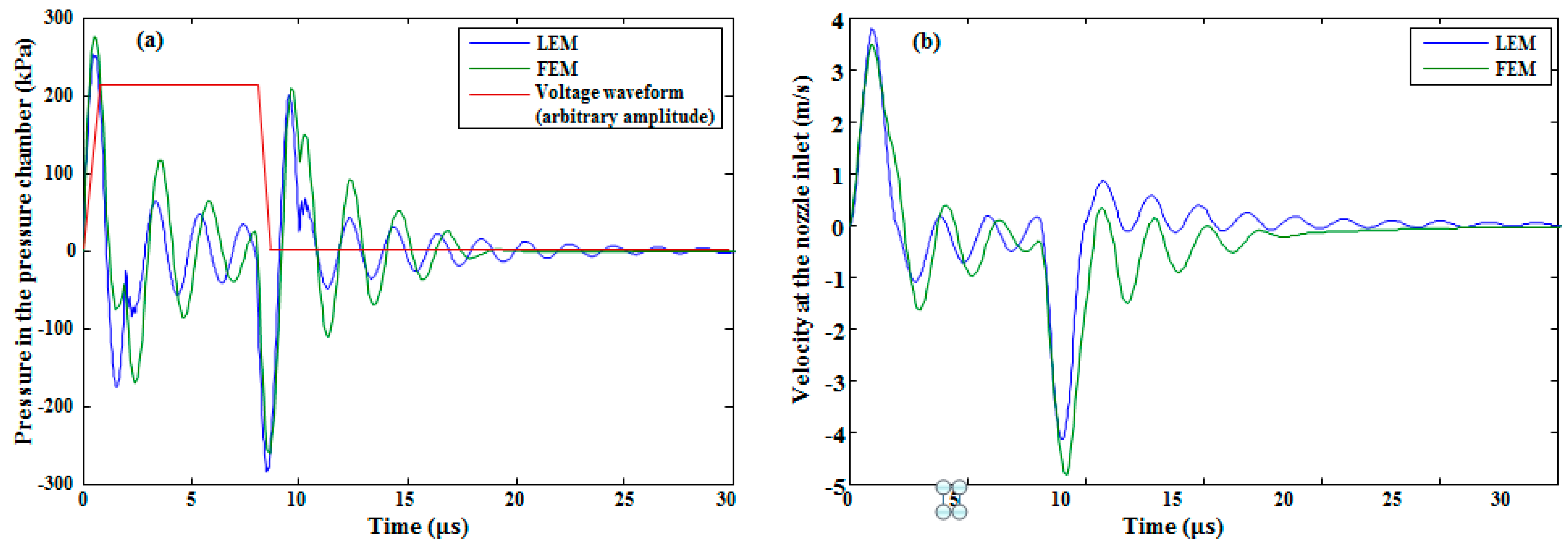
3.1. System Response
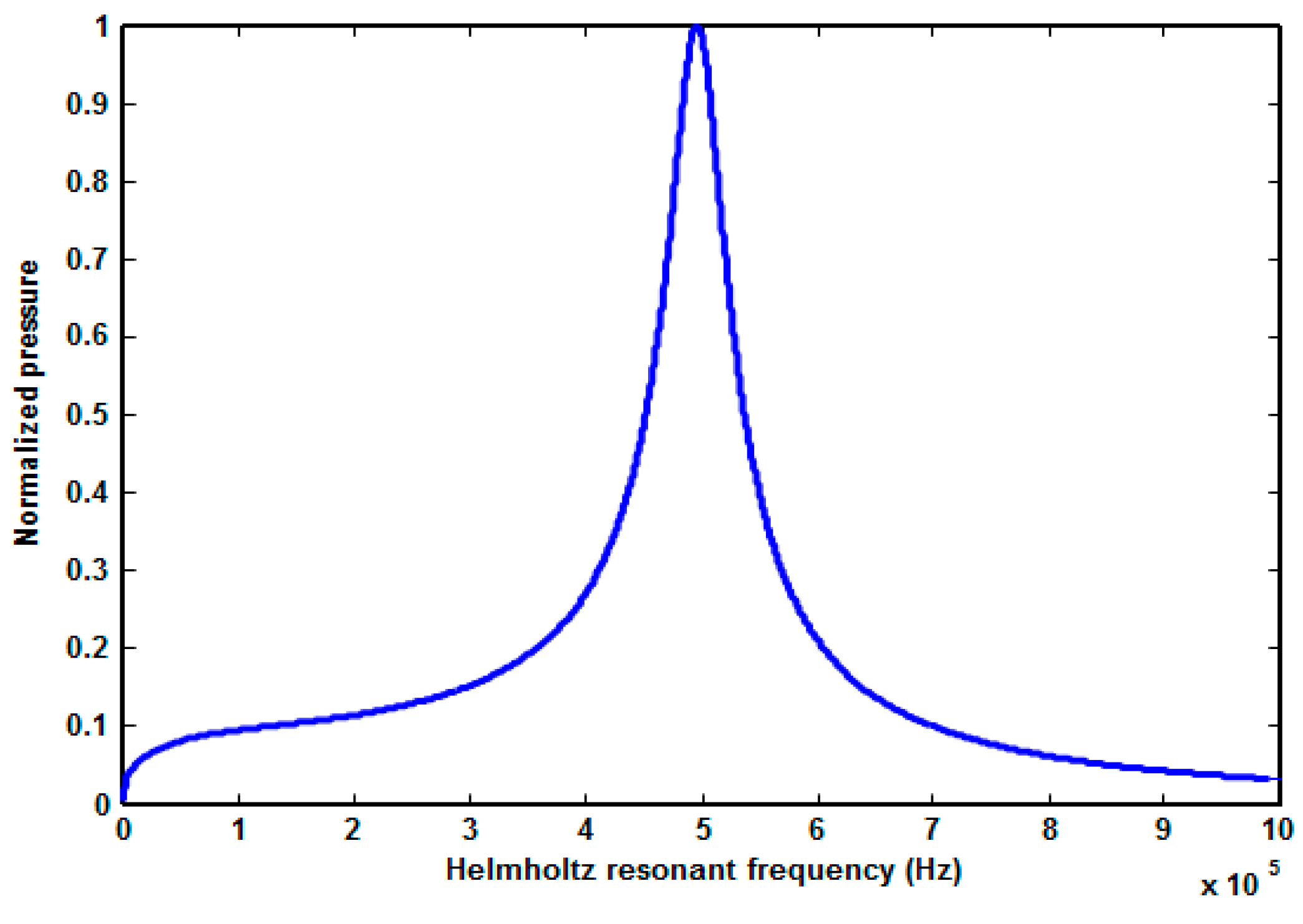
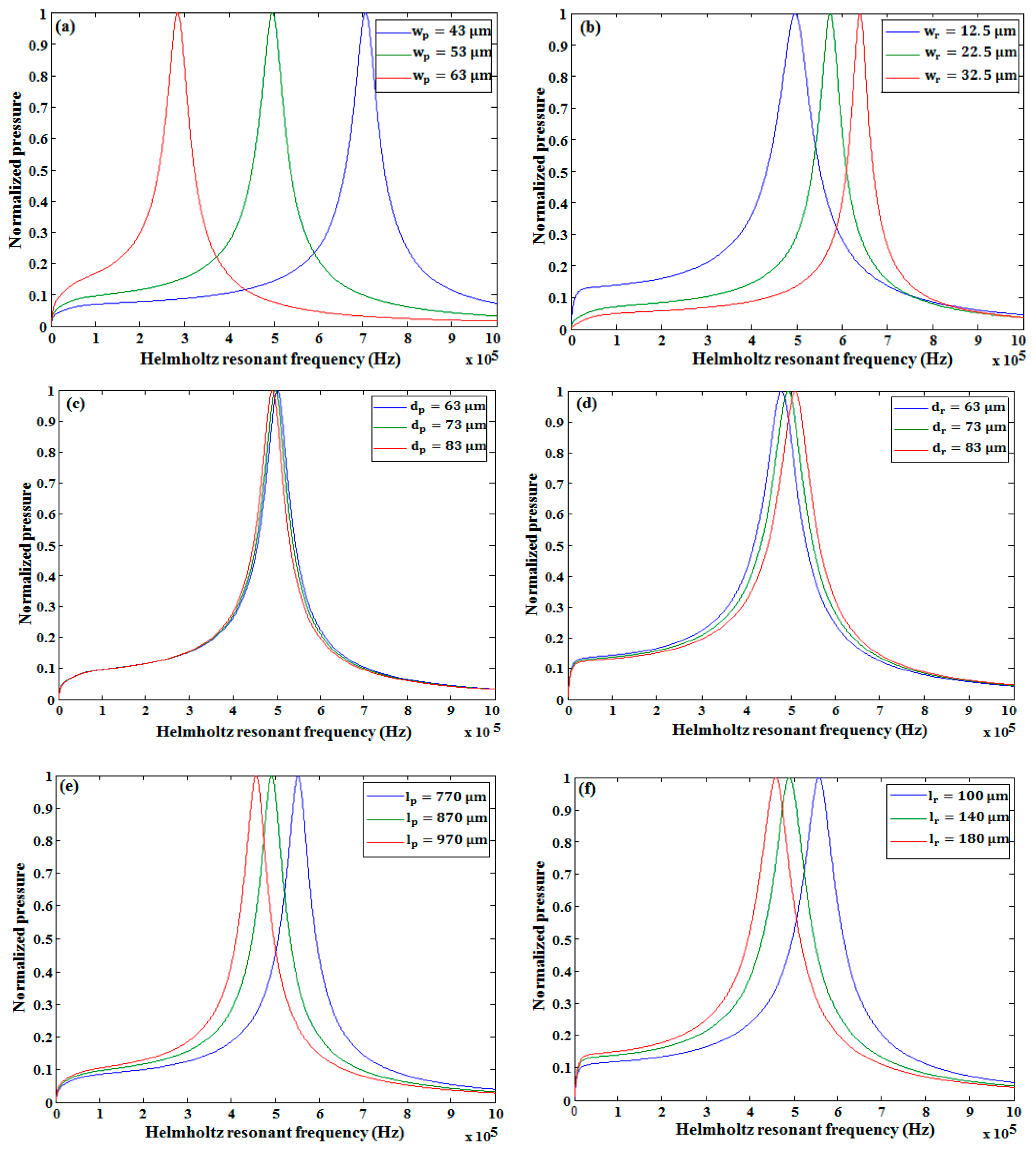
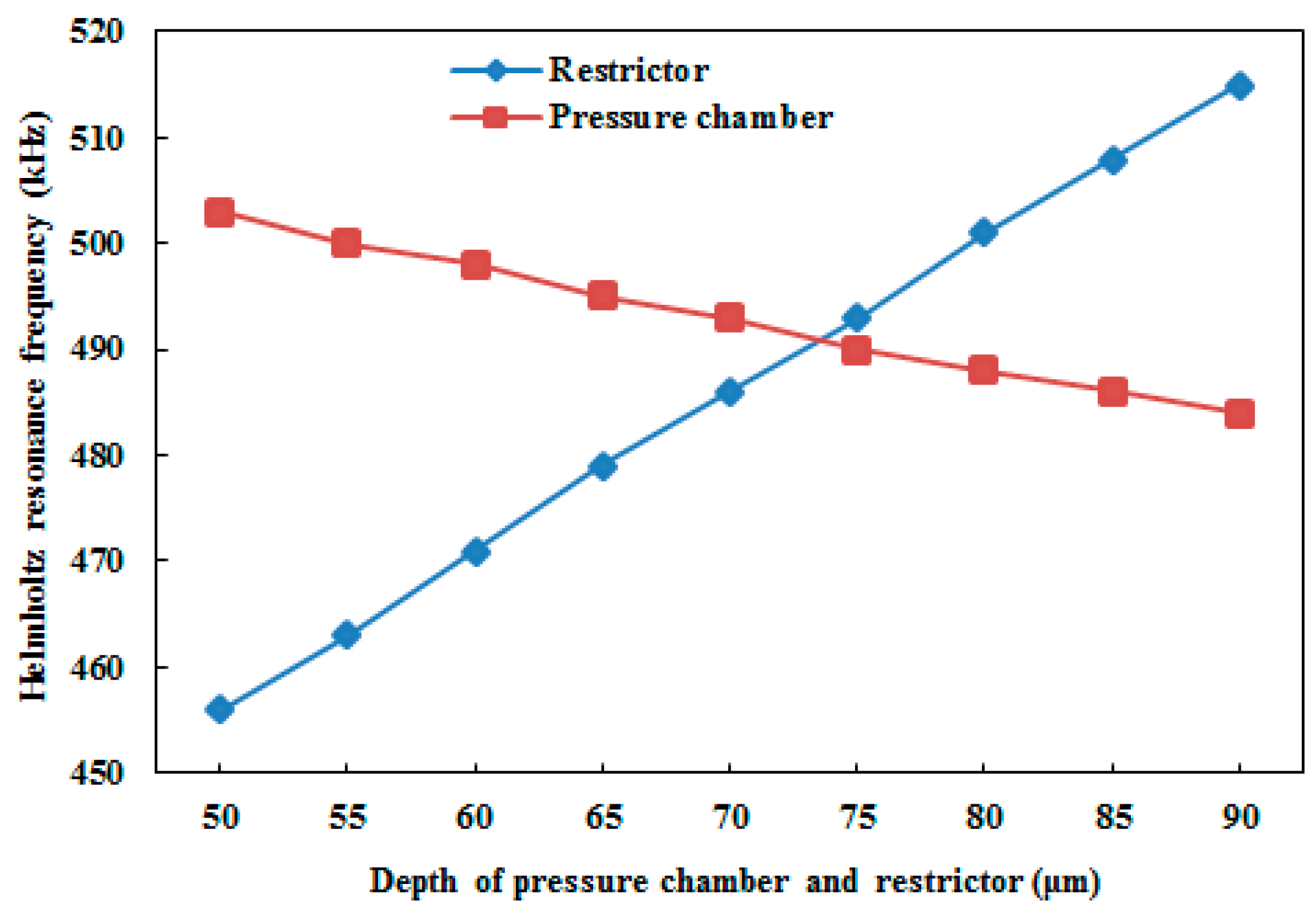
3.2. Analysis of the Helmholtz Resonance Frequency
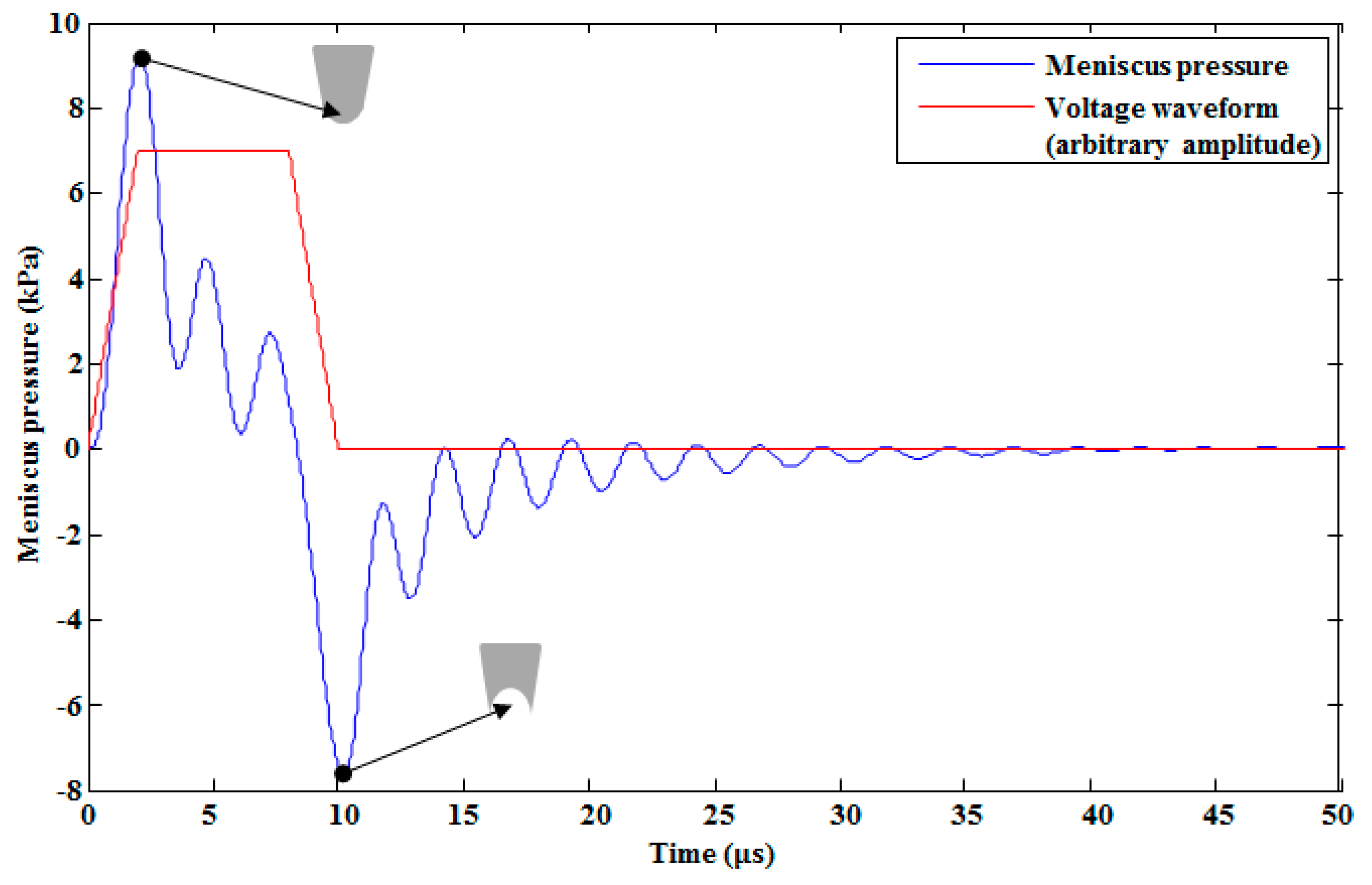
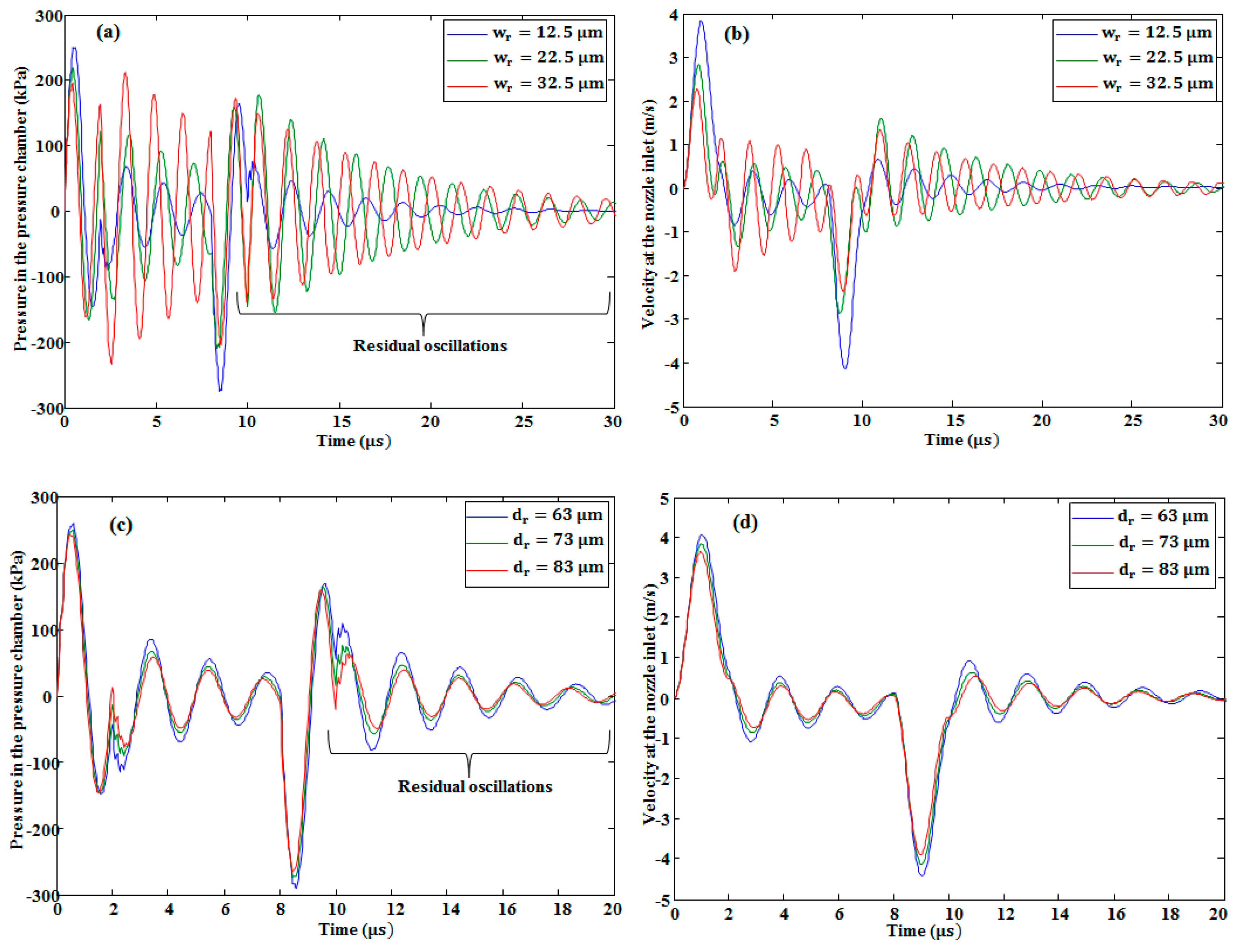
3.3. Analysis of Pressure and Velocity
3.4. Waveform Effect on the System’s Response
3.5. Hydro-Acoustic Cross-Talk Effect
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hoath, S.D. Fundamentals of Inkjet Printing: The Science of Inkjet and Droplets; Wiley-VCH: Weinheim, Germany, 2016. [Google Scholar]
- Hutchings, I.M.; Martin, G.D. Inkjet Technology for Digital Fabrication; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Wallace, D. Advanced micro and nanosystem. In Inkjet-Based Micromanufacturing; Korvink, J.G., Smith, P.J., Shin, D.-Y., Eds.; Wiley-VCH: Weinheim, Germany, 2012. [Google Scholar]
- Zapka, W. Handbook of Industrial Inkjet Printing: A Full System Approach; Wiley-VCH: Weinheim, Germany, 2018. [Google Scholar]
- Prasad, S.A.; Gallas, Q.; Horowitz, S.B.; Homeijer, B.D.; Sankar, B.V.; Cattafesta, L.N.; Sheplak, M. Analytical electroacoustic model of a piezoelectric composite circular plate. AIAA J. 2006, 44, 2311–2318. [Google Scholar] [CrossRef]
- Berger, S.S.; Recktenwald, G. Development of an improved model for piezo-electric driven ink jets. In 2003 International Conference on Digital Printing Technologies, Proceedings of the NIP and Digital Fabrication Conference; Society of Image Science and Technology: Springfield, VA, USA, 2003; pp. 323–327. [Google Scholar]
- Kim, B.H.; Lee, H.S.; Kim, S.W.; Kang, P.; Park, Y.S. Hydrodynamic responses of a piezoelectric driven MEMS inkjet print-head. Sens. Actuator A Phys. 2014, 210, 131–140. [Google Scholar] [CrossRef]
- Wang, J.; Huang, J.; Peng, J. Hydrodynamic response model of a piezoelectric inkjet print-head. Sens. Actuator A Phys. 2019, 285, 50–58. [Google Scholar] [CrossRef]
- Wei, H.; Xiao, X.; Yin, Z.; Yi, M.; Zou, H. A waveform design method for high DPI piezoelectric inkjet print-head based on numerical simulation. Microsyst. Technol. 2017, 23, 5365–5373. [Google Scholar] [CrossRef]
- Xiao, X.; Wang, X.; Chen, D.; Dou, J.; Wang, S.; Zou, H. A waveform design method for piezoelectric inkjet printhead with Doppler vibration test and numerical simulation. Microelectron. Eng. 2018, 196, 13–19. [Google Scholar] [CrossRef]
- Liou, T.M.; Chan, C.Y.; Shih, K.C. Effects of actuating waveform, ink property, and nozzle size on piezoelectrically driven inkjet droplets. Microfluid. Nanofluid. 2010, 8, 575–586. [Google Scholar] [CrossRef]
- Liu, Y.F.; Pai, Y.F.; Tsai, M.H.; Hwang, W.S. Investigation of driving waveform and resonance pressure in piezoelectric inkjet printing. Appl. Phys. A Mater. Sci. Process. 2012, 109, 323–329. [Google Scholar] [CrossRef]
- Zhong, Y.; Fang, H.; Ma, Q.; Dong, X. Analysis of droplet stability after ejection from an inkjet nozzle. J. Fluid Mech. 2018, 845, 378–391. [Google Scholar] [CrossRef]
- Arango, I.; Cañas, M. Dynamic analysis of a recirculation system of micro functional fluids for ink-jet applications. Microsyst. Technol. 2017, 23, 1485–1494. [Google Scholar] [CrossRef]
- Hamano, H.; Shimizu, T.; Shibata, T.; Suetomi, Y.; Hiejima, K.; Kuramochi, Y. Shear-mode piezo inkjet head with two recirculating paths. In Printing for Fabrication 2019, Proceedings of NIP and Digital Fabrication Conference; Society of Image Science and Technology: Springfield, VA, USA, 2019; pp. 173–17. [Google Scholar]
- Tanaka, Y.; Gofuku, A.; Nakamura, K. Analysis of electric-fluid analogy of pressure transmission through an electro-rheological-fluid in annuli. In Proceedings of the Fourth Annual Conference on Mechatronics and Machine Vision in Practice, Queensland, Australia, 23–25 September 1997. [Google Scholar]
- Ingard, U. On the theory and design of acoustic resonators. J. Acoust. Soc. Am. 1954, 25, 1037–1061. [Google Scholar] [CrossRef]
- Nathan, A. Matrix analysis of constrained networks. Proc. IEE Part C Monogr. 1961, 108, 98–106. [Google Scholar] [CrossRef]
- Prasad, S.; Sankar, B.; Cattafesta, L.; Horowitz, S.; Gallas, Q.; Sheplak, M. Two-port electroacoustic model of a piezoelectric circular composite plate. In Proceedings of the 43rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Denver, CO, USA, 22–25 April 2002. [Google Scholar]
- Khalate, A.A.; Bombois, X.; Babuška, R.; Wijshoff, H.; Waarsing, R. Performance improvement of a drop-on-demand inkjet printhead using an optimization-based feedforward control method. Control Eng. Pract. 2011, 19, 771–781. [Google Scholar] [CrossRef]
- Dijksman, J. Design of Piezo Inkjet Print Heads: From Acoustics to Applications; Wiley-VCH: Weinheim, Germany, 2019. [Google Scholar]
- Wijshoff, H. The dynamics of the piezo inkjet printhead operation. Phys. Rep. 2010, 491, 77–177. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pressure Chamber | Restrictor | Nozzle | ||||||
|---|---|---|---|---|---|---|---|---|
| Length (μm) | Width (μm) | Depth (μm) | Length (μm) | Width (μm) | Depth (μm) | Length (μm) | Inlet Radius (μm) | Outlet Radius (μm) |
| 870 | 53 | 73 | 140 | 12.5 | 73 | 33 | 16 | 8 |
| PZT | Platinum | Silicon | SiO2 | |||||
|---|---|---|---|---|---|---|---|---|
| Width (μm) | Thickness (μm) | Width (μm) | Thickness (μm) | Width (μm) | Thickness (μm) | Width (μm) | Thickness (μm) | |
| Upper | Lower | |||||||
| 44 | 2 | 44 | 0.11 | 0.15 | 53 | 1.1 | 53 | 0.5 |
| Parameters | Formulas and Simulations | Values | |
|---|---|---|---|
| Pressure chamber | |||
| FEM | |||
| Nozzle | |||
| FEM | |||
| Restrictor | |||
| FEM | |||
| Density (kg·m−3) | Surface Tension (N/m) | Viscosity (Pa·s) |
|---|---|---|
| 1102 | 34.68 × 10−3 | 5.95 × 10−3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shah, M.A.; Lee, D.-G.; Hur, S. Design and Characteristic Analysis of a MEMS Piezo-Driven Recirculating Inkjet Printhead Using Lumped Element Modeling. Micromachines 2019, 10, 757. https://doi.org/10.3390/mi10110757
Shah MA, Lee D-G, Hur S. Design and Characteristic Analysis of a MEMS Piezo-Driven Recirculating Inkjet Printhead Using Lumped Element Modeling. Micromachines. 2019; 10(11):757. https://doi.org/10.3390/mi10110757
Chicago/Turabian StyleShah, Muhammad Ali, Duck-Gyu Lee, and Shin Hur. 2019. "Design and Characteristic Analysis of a MEMS Piezo-Driven Recirculating Inkjet Printhead Using Lumped Element Modeling" Micromachines 10, no. 11: 757. https://doi.org/10.3390/mi10110757