Fundamental Perceptual Characterization of an Integrated Tactile Display with Electrovibration and Electrical Stimuli


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
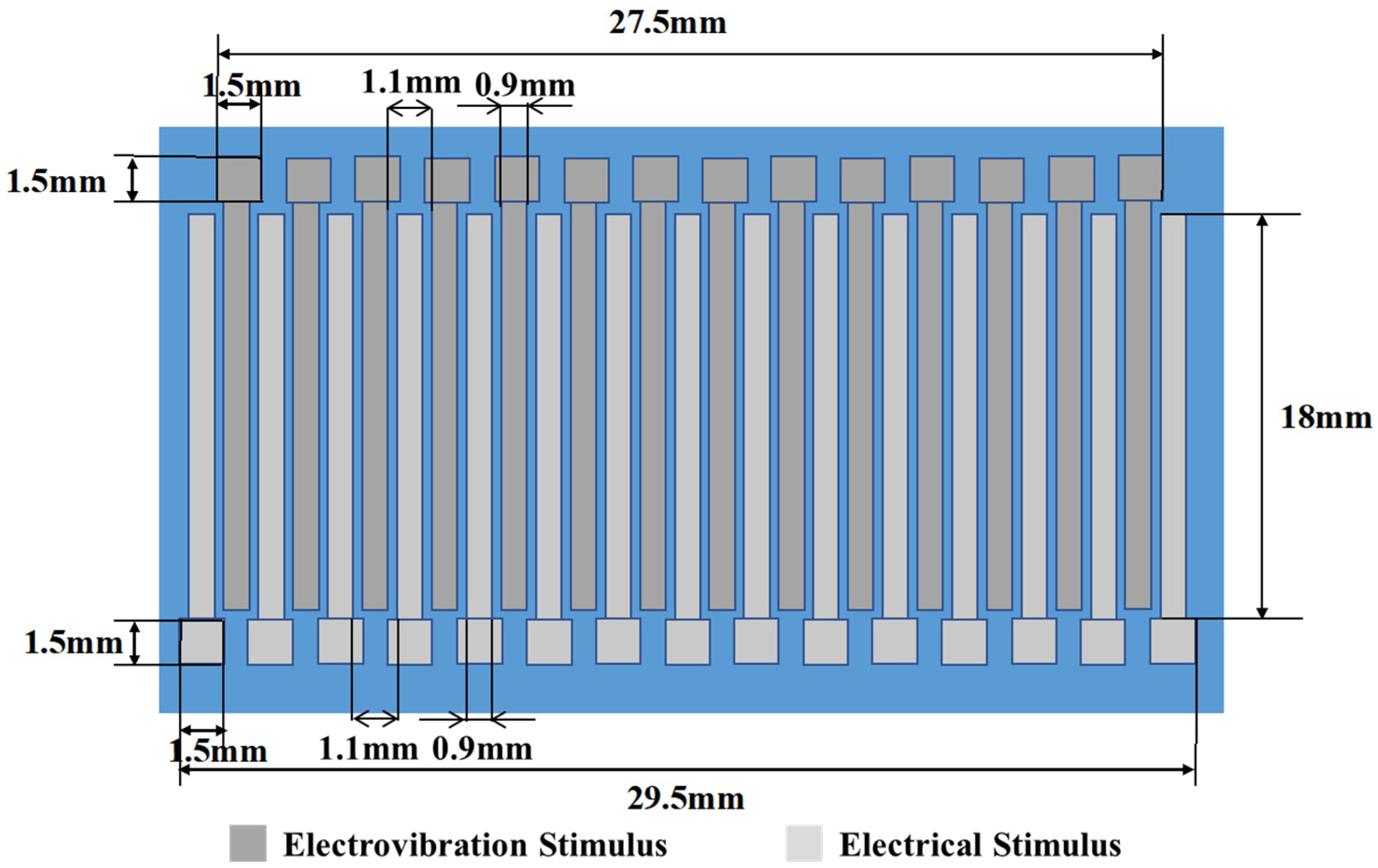
2. Principle and Design
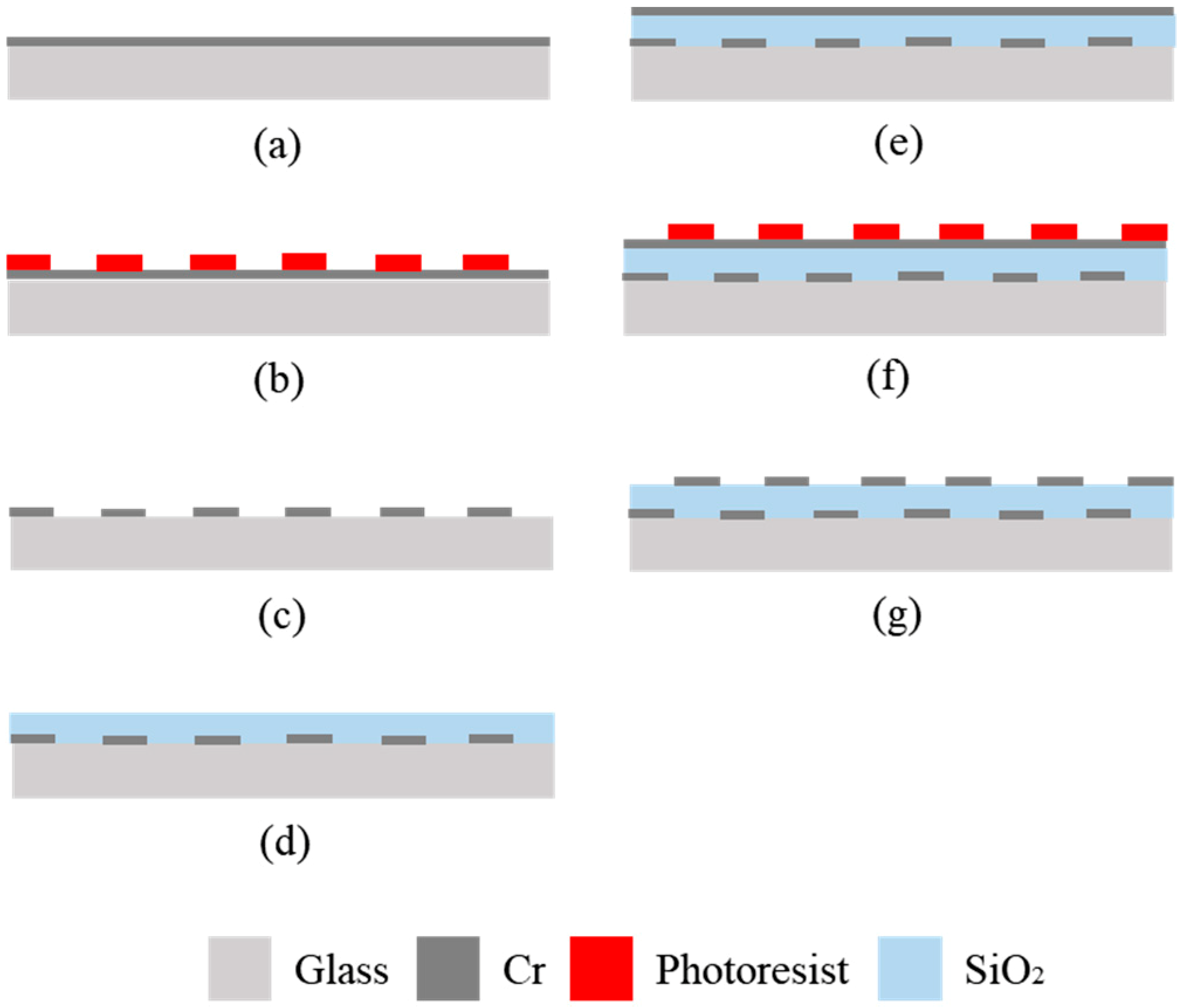
3. Fabrication Process
4. Experimental Procedure
4.1. Experimental Setup
4.2. Evaluation for a Single Tactile Stimulus
4.3. Evaluation for Multiple Tactile Stimuli
5. Experimental Results
5.1. Evaluation for a Single Tactile Stimulus
5.2. Evaluation for Multiple Tactile Stimuli
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fukumoto, M.; Sugimura, T. Active Click: Tactile Feedback for Touch Panels. In Proceedings of the 2001 CHI Conference on Human Factors in Computer Systems, Seattle, WA, USA, 31 March–5 April 2003; pp. 121–122. [Google Scholar] [CrossRef]
- Kang, J.; Lee, J.; Kim, H.; Cho, K.; Wang, S.; Ryu, J. Smooth vibrotactile flow generation using two piezoelectric actuators. IEEE Trans. Haptics 2012, 5, 21–32. [Google Scholar] [CrossRef]
- Yem, V.; Kajimoto, H. Wearable Tactile Device using Mechanical and Electrical Stimulation for Fingertip Interaction with Virtual World. In Proceedings of the 2017 IEEE Virtual Reality (VR), Los Angeles, CA, USA, 18–22 March 2017; pp. 99–104. [Google Scholar] [CrossRef]
- Jiao, J.; Zhang, Y.; Wang, D.; Visell, Y.; Cao, D.; Guo, X.; Sun, X. Data-driven rendering of fabric textures on electrostatic tactile displays. In Proceedings of the 2018 IEEE Haptics Symposium, San Francisco, CA, USA, 25–28 March 2018; pp. 169–174. [Google Scholar] [CrossRef]
- Lévesque, V.; Pasquero, J.; Hayward, V.; Legault, M. Display of virtual braille dots by lateral skin deformation: Feasibility study. ACM Trans. Appl. Percept. 2005, 2, 132–149. [Google Scholar] [CrossRef]
- Zhang, K.; Follmer, S. Electrostatic Adhesive Brakes for High Spaital Resolution Refreshable 2.5D Tactile Shape Displays. In Proceedings of the 2018 IEEE Haptics Symposium, San Francisco, CA, USA, 25–28 March 2018; pp. 319–326. [Google Scholar] [CrossRef]
- Kosemura, Y.; Ishikawa, H.; Watanabe, J.; Miki, N. Characterization of surfaces virtually created using MEMS tactile display. Jpn. J. Appl. Phys. 2014, 53, 06JM11. [Google Scholar] [CrossRef]
- Zhao, F.; Fukuyama, K.; Sawada, H. Compact Braille display using SMA wire array. In Proceedings of the 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 28–33. [Google Scholar] [CrossRef]
- Singh, H.; Suthar, B.; Mehdi, S.Z.; Ryu, J.H. Ferro-Fluid Based Portable Fingertip Haptic Display and Its Preliminary Experimental Evaluation. In Proceedings of the 2018 IEEE Haptics Symposium, San Francisco, CA, USA, 25–28 March 2018; pp. 14–19. [Google Scholar] [CrossRef]
- Hoshi, T.; Takahashi, M.; Iwamoto, T.; Shinoda, H. Noncontact tactile display based on radiation pressure of airborne ultrasound. IEEE Trans. Haptics 2010, 3, 155–165. [Google Scholar] [CrossRef] [PubMed]
- Hasegawa, K.; Shinoda, H. Aerial Vibrotactile Display Based on Multiunit Ultrasound Phased Array. IEEE Trans. Haptics 2018, 11, 367–377. [Google Scholar] [CrossRef] [PubMed]
- Strong, R.M.; Troxel, D.E. An Electrotactile Display. IEEE Trans. Man-Mach. Syst. 1970, 11, 72–79. [Google Scholar] [CrossRef]
- Bau, O.; Poupyrev, I.; Israr, A.; Harrison, C. TeslaTouch: Electrovibration for touch surfaces. In Proceedings of the 23nd Annual ACM Symposium on User Interface Software and Technology, New York, NY, USA, 3–6 October 2010; pp. 283–292. [Google Scholar] [CrossRef]
- Bau, O.; Poupyrev, I. Revel. ACM Trans. Graph. 2012, 31, 1–11. [Google Scholar] [CrossRef]
- Kajimoto, H.; Kawakami, N.; Maeda, T.; Tachi, S. Tactile Feeling Display using Functional Electrical Stimulation. In Proceedings of the 9th International Conference on Artificial Reality and Telexistance, Tokyo, Japan, 16–18 December 1999. [Google Scholar] [CrossRef]
- Kaczmarek, K.A.; Haase, S.J. Pattern identification and perceived stimulus quality as a function of stimulation waveform on a fingertip-scanned electrotactile display. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 9–16. [Google Scholar] [CrossRef] [PubMed]
- Kajimoto, H. Design of Cylindrical Whole-Hand Haptic Interface Using Electrocutaneous Display. In Proceedings of the EuroHaptics 2012, Tampere, Finland, 12–15 June 2012; pp. 67–72. [Google Scholar] [CrossRef]
- Kitamura, N.; Chim, J.; Miki, N. Electrotactile display using microfabricated micro-needle array. J. Micromech. Microeng. 2015, 25, 025016. [Google Scholar] [CrossRef]
- Yoshioka, T.; Gibb, B.; Dorsch, K.D.; Hsiao, S.S.; Johnson, K.O. Neural coding mechanisms underlying perceived roughness of finely textured surfaces. J. Neurosci. 2001, 21, 6905–6916. [Google Scholar] [CrossRef] [PubMed]
- Pyo, D.; Ryu, S.; Kim, S.C.; Kwon, D.S. A New Surface Display for 3D Haptic Rendering. In Proceedings of the EuroHaptics 2014, Versailles, France, 24–27 June 2014; pp. 487–495. [Google Scholar] [CrossRef]
- Ryu, S.; Pyo, D.; Lim, S.; Kwon, D. Mechanical Vibration Influences the Perception of Electrovibration. Sci. Rep. 2018, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Cho, I.; Lee, H.J.; Bleuler, H.; Gallo, S.; Son, C. A flexible multimodal tactile display for delivering shape and material information. Sens. Actuators A Phys. 2015, 236, 180–189. [Google Scholar] [CrossRef]
- Ishizuka, H.; Hatada, R.; Cortes, C.; Miki, N. Development of a fully flexible sheet-type tactile display based on electrovibration stimulus. Micromachines 2018, 9, 230. [Google Scholar] [CrossRef] [PubMed]
- Kato, K.; Ishizuka, H.; Kajimoto, H.; Miyashita, H. Double-sided printed tactile display with electrical stimuli and electrostatic forces and its assessment. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems 2018, Montreal, QC, Canada, 21–26 April 2018. No. 450. [Google Scholar] [CrossRef]
- Vardar, Y.; Guclu, B.; Basdogan, C. Effect of Waveform on Tactile Perception by Electrovibration Displayed on Touch Screens. IEEE Trans. Haptics 2017, 10, 488–499. [Google Scholar] [CrossRef] [PubMed]
- Ishizuka, H.; Suzuki, K.; Takao, H.; Terao, K.; Shimokawa, F.; Kajimoto, H. Evaluation of Multi-Electrode Effects on Electrovibration Tactile Stimulation. Trans. Jpn. Inst. Electron. Packag. 2017, 10, E17-004-1–E17-004-8. [Google Scholar] [CrossRef]
- Kajimoto, H. Electrotactile display with real-time impedance feedback using pulse width modulation. IEEE Trans. Haptics 2012, 5, 184–188. [Google Scholar] [CrossRef] [PubMed]
- Yem, V.; Kajimoto, H. Comparative Evaluation of Tactile Sensation by Electrical and Mechanical Stimulation. IEEE Trans. Haptics 2017, 10, 130–134. [Google Scholar] [CrossRef] [PubMed]
- Muniak, M.A.; Ray, S.; Hsiao, S.S.; Dammann, J.F.; Bensmaia, S.J. The Neural Coding of stimulus intensity: Linking the population response of mechanoreceptive afferents with psychophysical behavior. J. Neurosci. 2007, 27, 11687–11699. [Google Scholar] [CrossRef] [PubMed]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Komurasaki, S.; Kajimoto, H.; Ishizuka, H. Fundamental Perceptual Characterization of an Integrated Tactile Display with Electrovibration and Electrical Stimuli. Micromachines 2019, 10, 301. https://doi.org/10.3390/mi10050301
Komurasaki S, Kajimoto H, Ishizuka H. Fundamental Perceptual Characterization of an Integrated Tactile Display with Electrovibration and Electrical Stimuli. Micromachines. 2019; 10(5):301. https://doi.org/10.3390/mi10050301
Chicago/Turabian StyleKomurasaki, Seiya, Hiroyuki Kajimoto, and Hiroki Ishizuka. 2019. "Fundamental Perceptual Characterization of an Integrated Tactile Display with Electrovibration and Electrical Stimuli" Micromachines 10, no. 5: 301. https://doi.org/10.3390/mi10050301