Slip and Magnetic Attraction Effects in a Microrobot with Magnetic-Wheels and Skid-Steering


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Dynamics of a Skid-Steered Wheeled Microrobot
2.1. Kinematic Theory of a Skid-Steered Wheeled Microrobot
- : mass of link j, : all mass of body and wheels,
- : position of link j,
- : angular velocity of link j,
- : sum of the forces acting on the wheels from the ground.
- : inertial moment of link j,
- : sum of moments acting on the wheels from the ground.
2.2. Friction Force between the Wheel and Ground
2.2.1. Wheel Coordinate System
- : radius of wheel i,
- : x-axis directional speed of wheel i,
- , rotating speed of wheel i,
- : y-axis directional speed of wheel i.
2.2.2. Model of Tire Slip Characteristics
- Kx: driving stiffness,
- Ky: cornering stiffness.
- μ0: maximum coefficient of static friction,
- Ku: decrease in the coefficient when the friction changes from static friction to dynamic friction (= 0.2).
- a: constant to determine the form of the function (= 1.2),
3. Measurement of the Slip Characteristics of a Magnetic Wheel
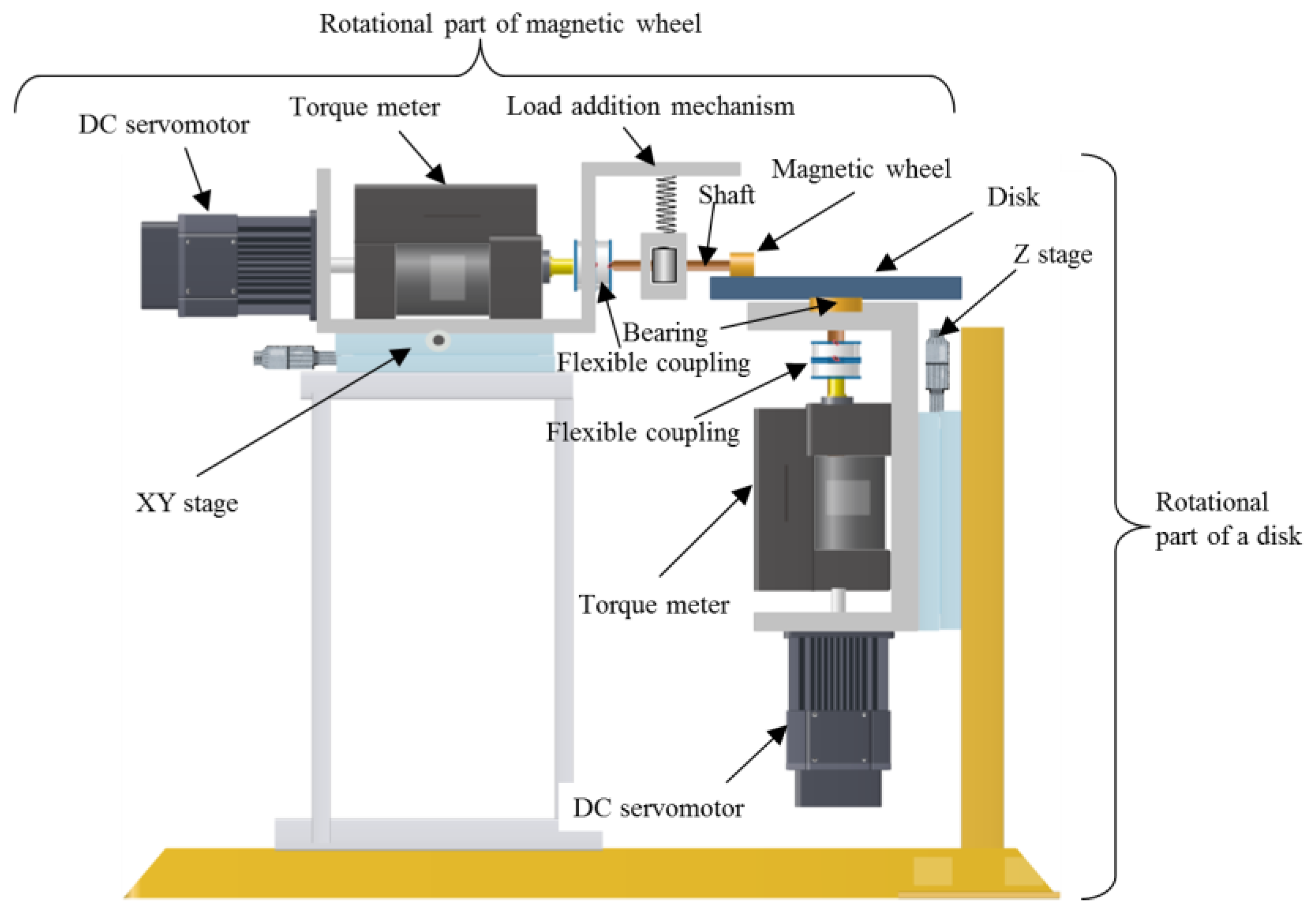
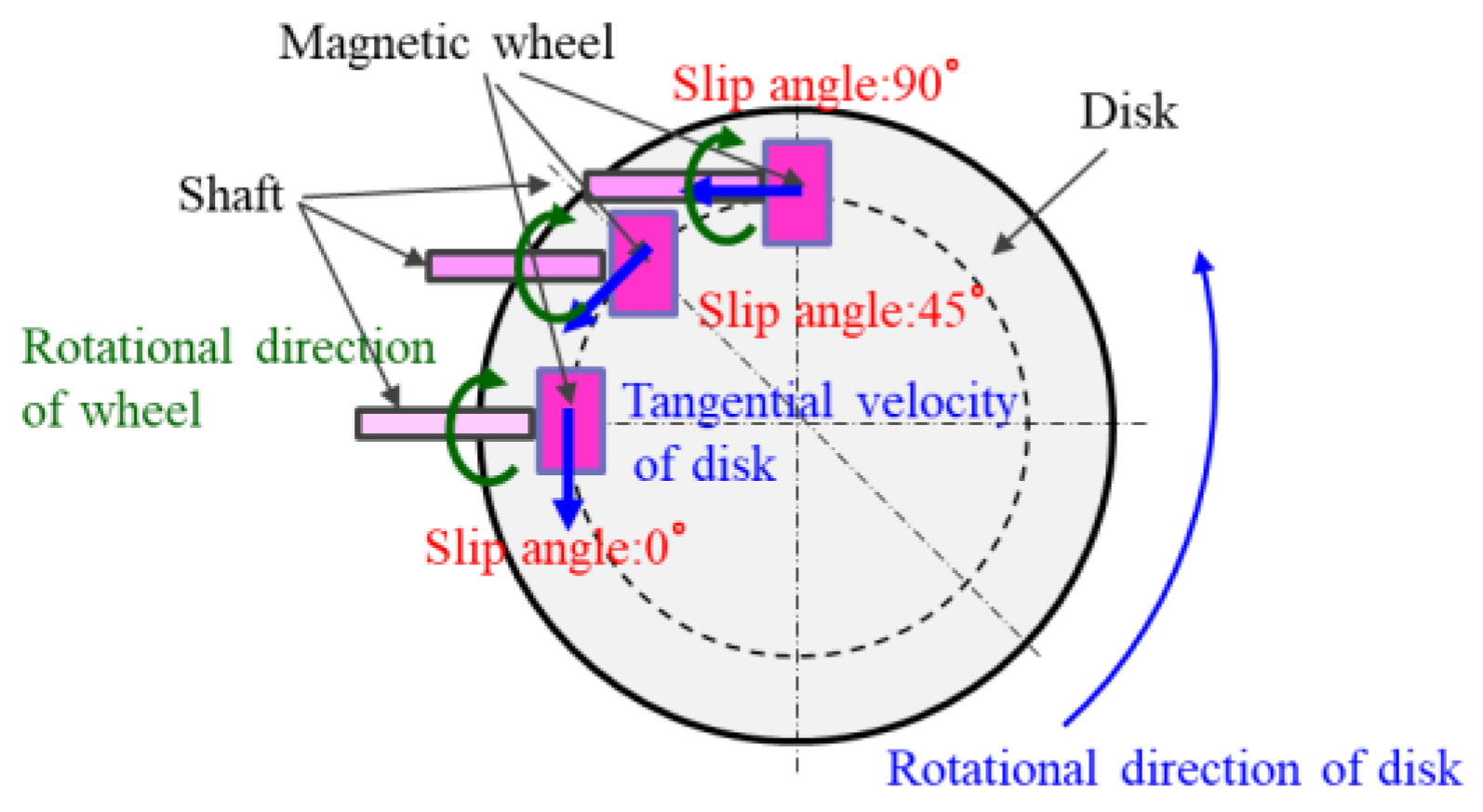
3.1. Apparatus for Evaluation of the Characteristics of a Magnetic Wheel
TD = R(fxcosα − fysinα)
fx = Tw/r
fy = cosecα(TD/R + Tw × cosα/r)
- r: radius of the wheel,
- R: radius of the disk on which the wheel is positioned.
3.2. Shape of Magnetic Wheel
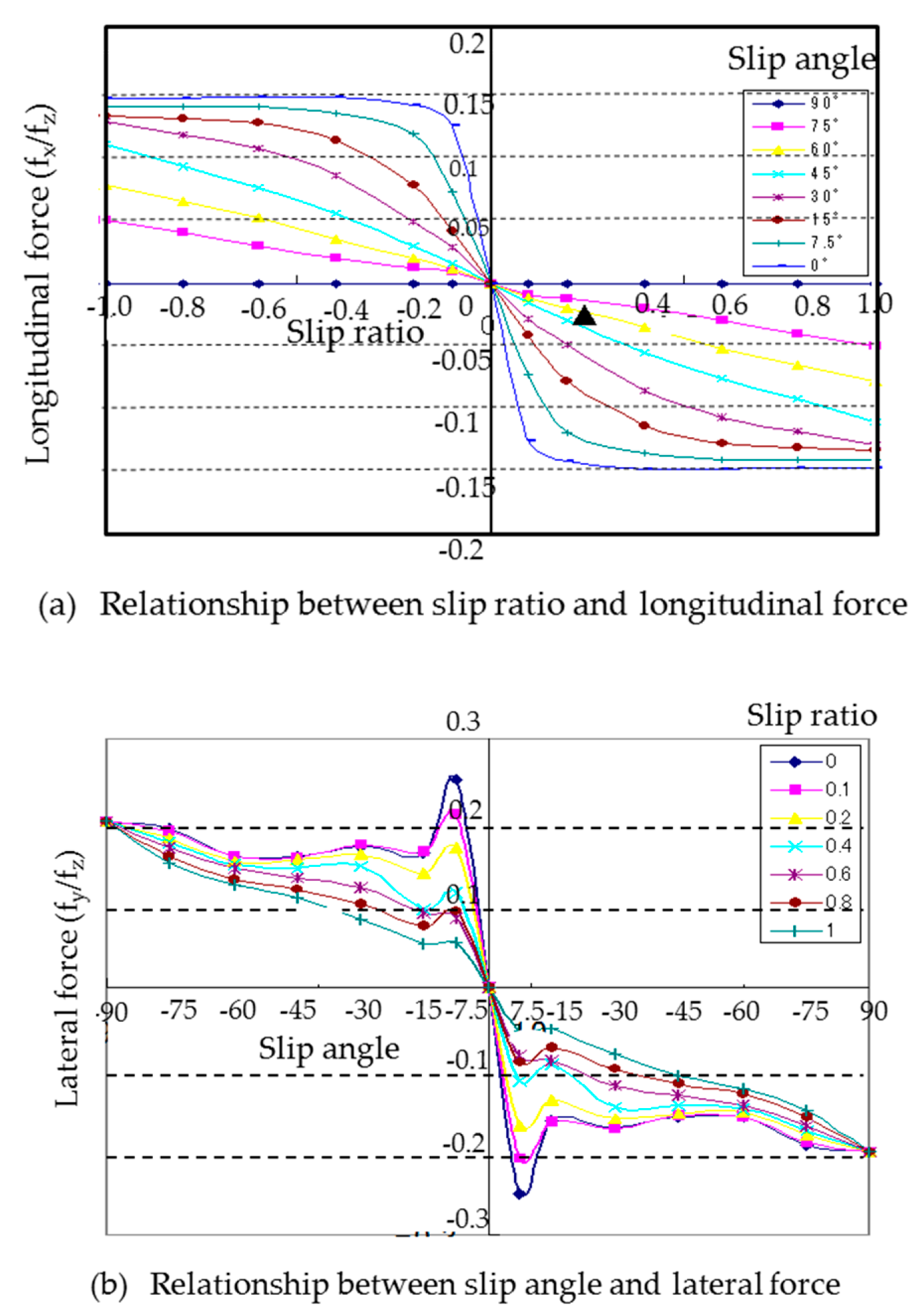
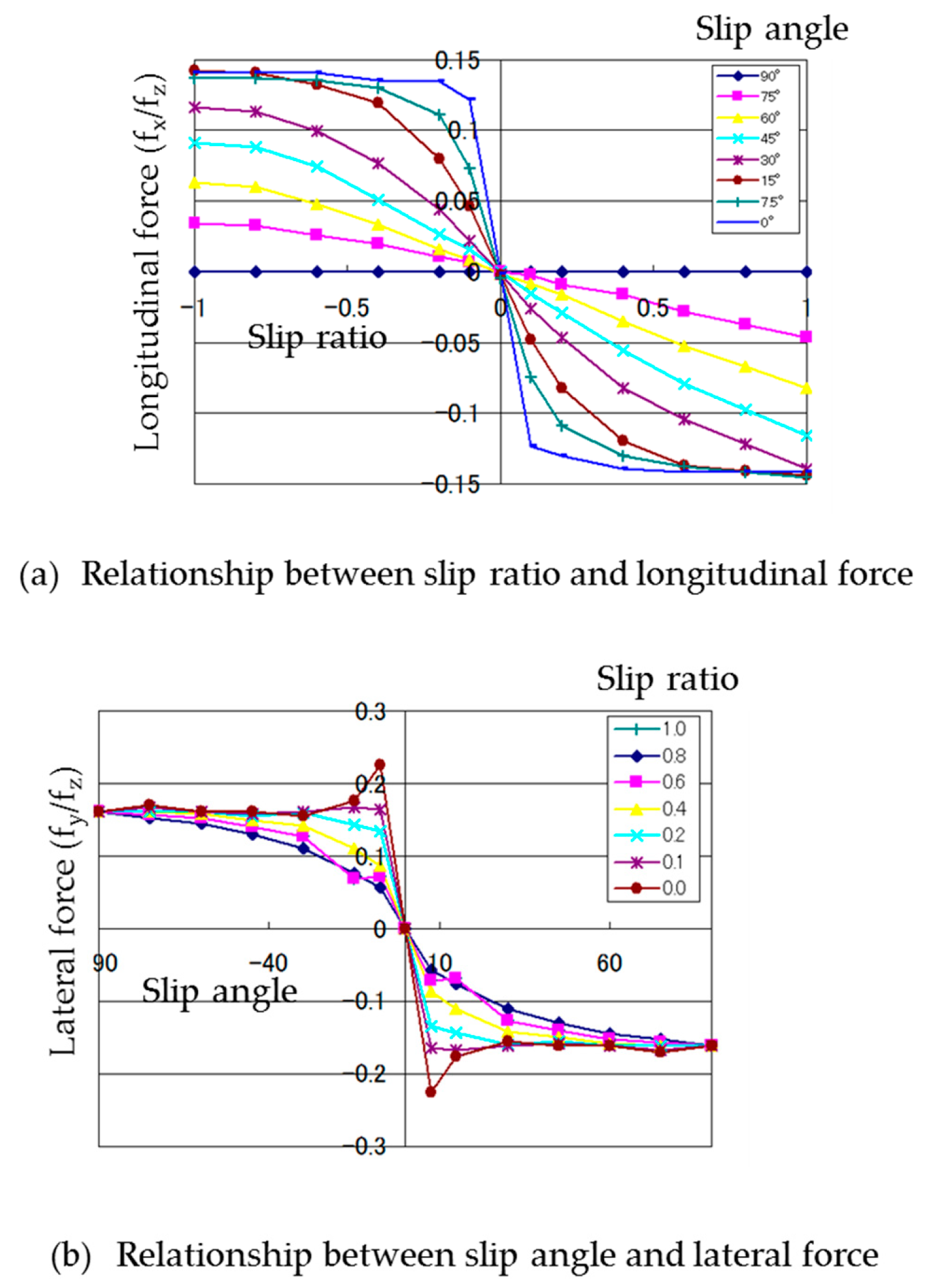
3.3. Measured Slip Characteristics of the Column-Type Magnetic Wheel
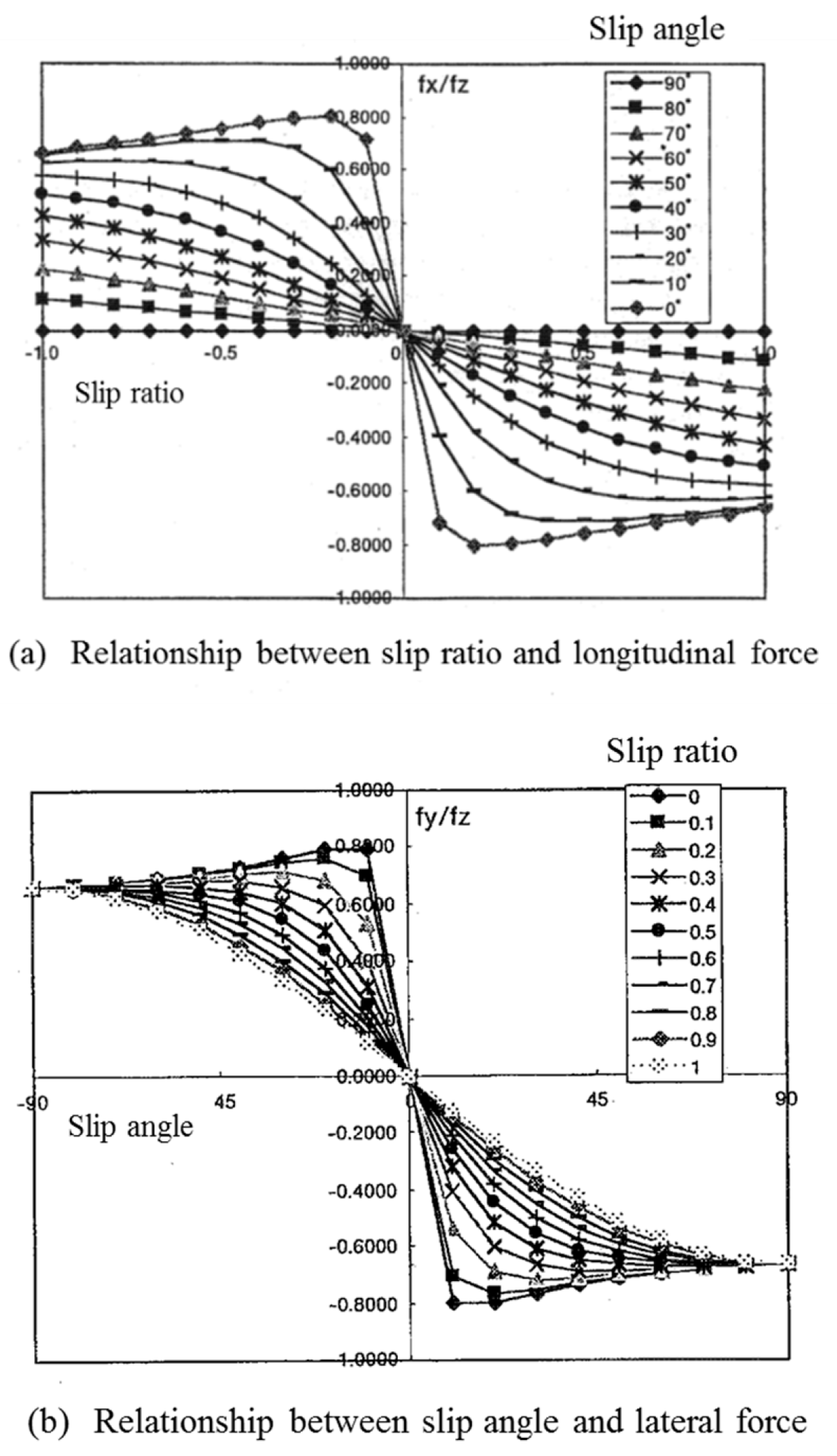
- In the relationship between the slip ratio and longitudinal force, the maximum longitudinal force, normalized by the vertical force of the magnetic wheel, was approximately 0.15, whereas that of the tire was approximately 0.8. The normalized longitudinal force of the magnetic wheel was flat when the slip ratio was more than 0.4 at a slip angle of zero, whereas that of the tire decreased when the slip ratio was more than 0.2 at a slip angle of zero.
- In the relationship between the slip angle and lateral force, the maximum lateral force, normalized by the vertical force of the magnetic wheel, was approximately 0.25 and decreased to approximately 0.15–0.2 afterwards, but varied with the slip angle, whereas that of the tire was approximately 0.8 and decreased when the slip angle was more than 10 degrees at a slip ratio of zero.
3.4. Measured Slip Characteristics of the Barrel-Type Magnetic Wheel
4. Simulation Results
- The driving performance of a skid-steered microrobot could be simulated in straight or turning movements.
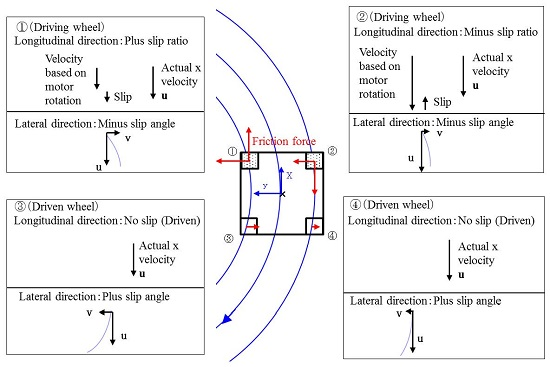
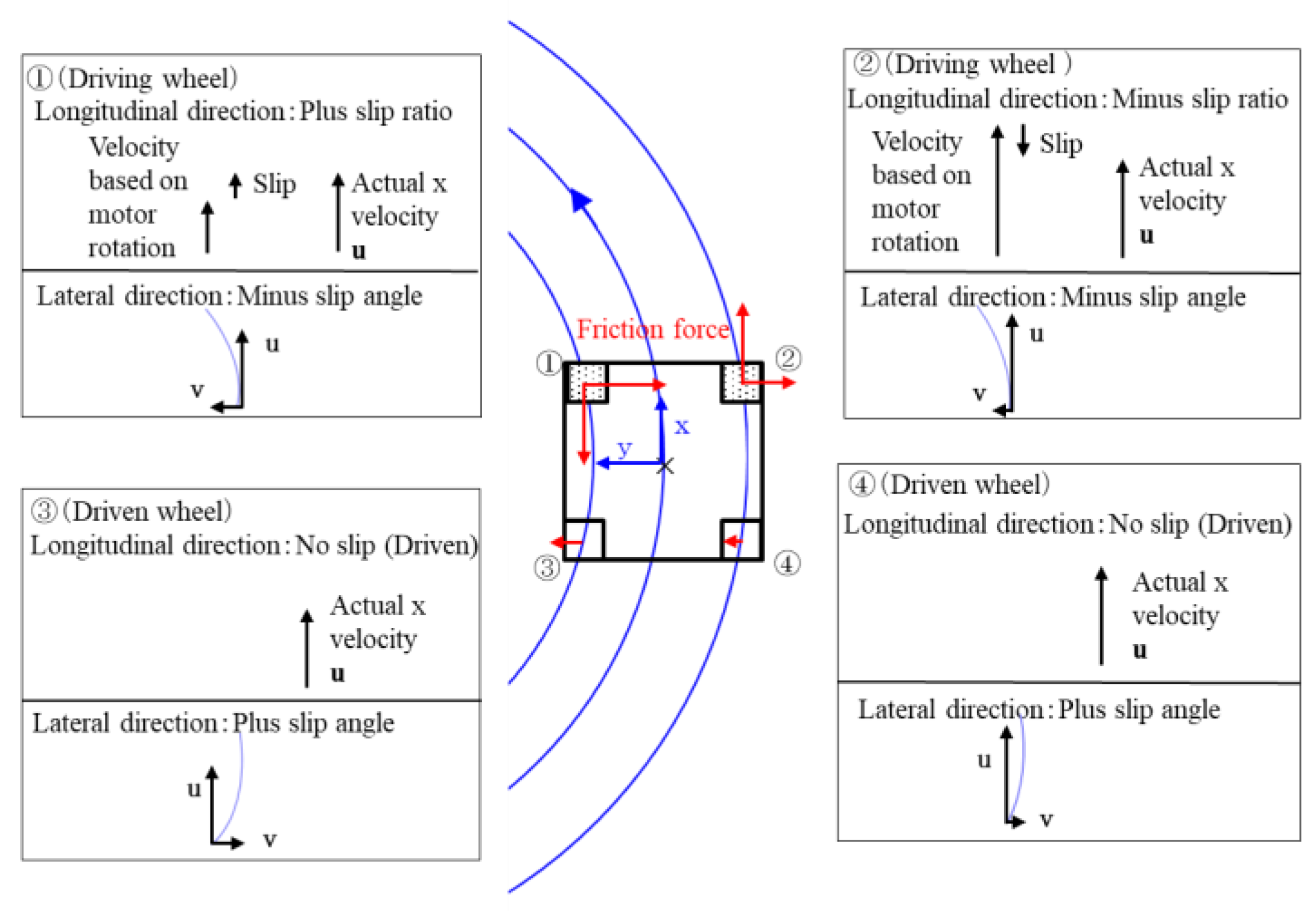
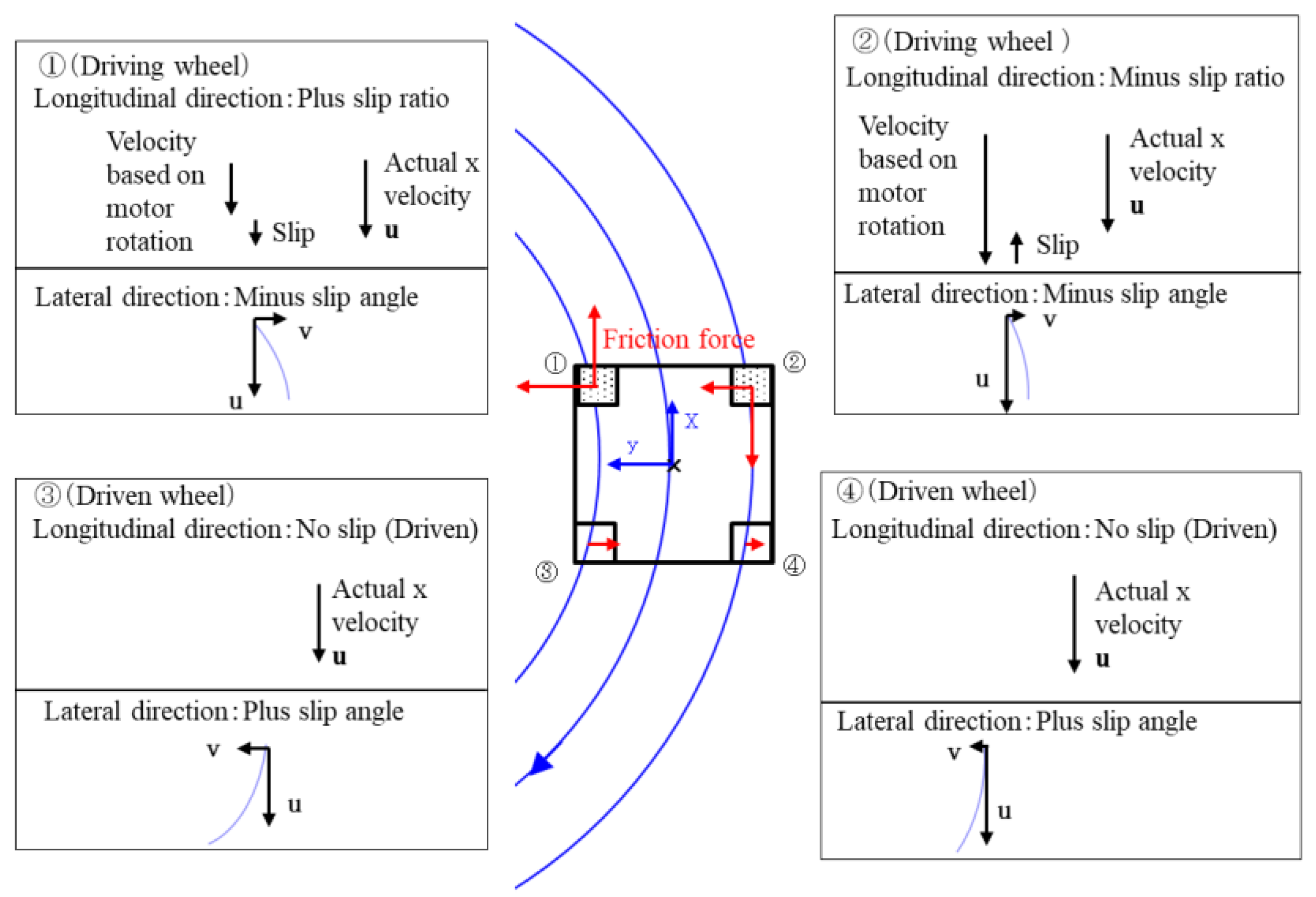
- Slip and skid occurred in turning because of four fixed-direction wheels. The dynamics model for slips and skids was installed.
- The rotational frequency for a driving wheel could be input instead of torque.
- A driven wheel rotated around its shaft without slipping, following the motion of the main body of the machine. Therefore, a frictional force on the driven wheel in the driving direction did not occur.
- Magnetic attraction could be added in addition to weight as the z-axis force.
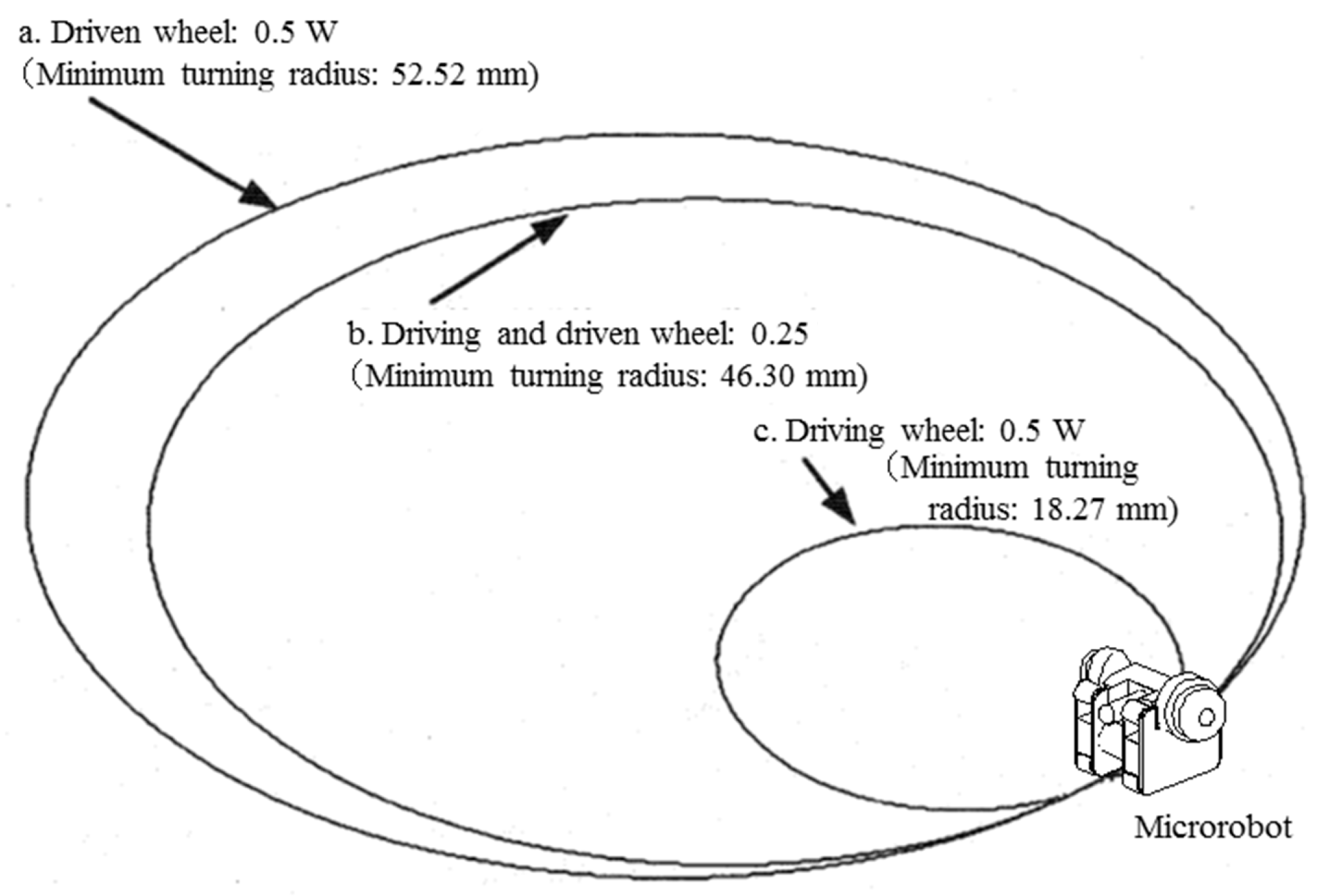
4.1. Effect of Magnetic Attraction (Distribution of Magnetic Attraction to Driving and Driven Wheels)
- a
- Each driven wheel had a magnetic attraction of 0.5 W, and the driving wheels had no magnetic attraction.
- b
- Each driven wheel and each driving wheel had a magnetic attraction of 0.25 W.
- c
- Each driving wheel had a magnetic attraction of 0.5 W, and the driven wheels had no magnetic attraction.
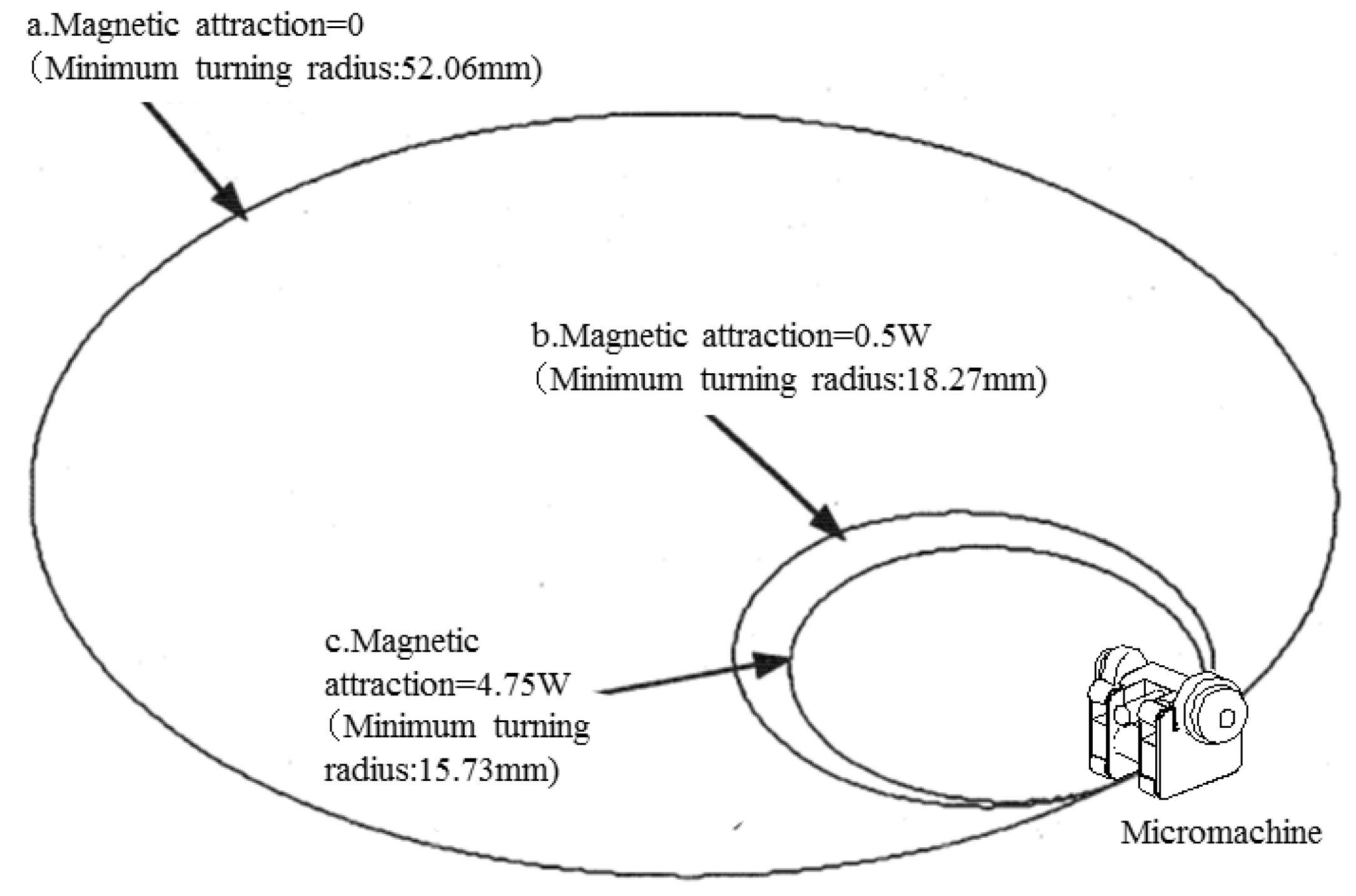
4.2. Effect of the Magnitude of Magnetic Attraction
- a
- The driving and driven wheels had no magnetic attraction.
- b
- Each driving wheel had a magnetic attraction of 0.5 W, and the driven wheels had no magnetic attraction.
- c
- Each driving wheel had a magnetic attraction of 4.75 W, and the driven wheels had no magnetic attraction.
4.3. Comparison of Slip Characteristics between the Tire and Magnetic Wheel
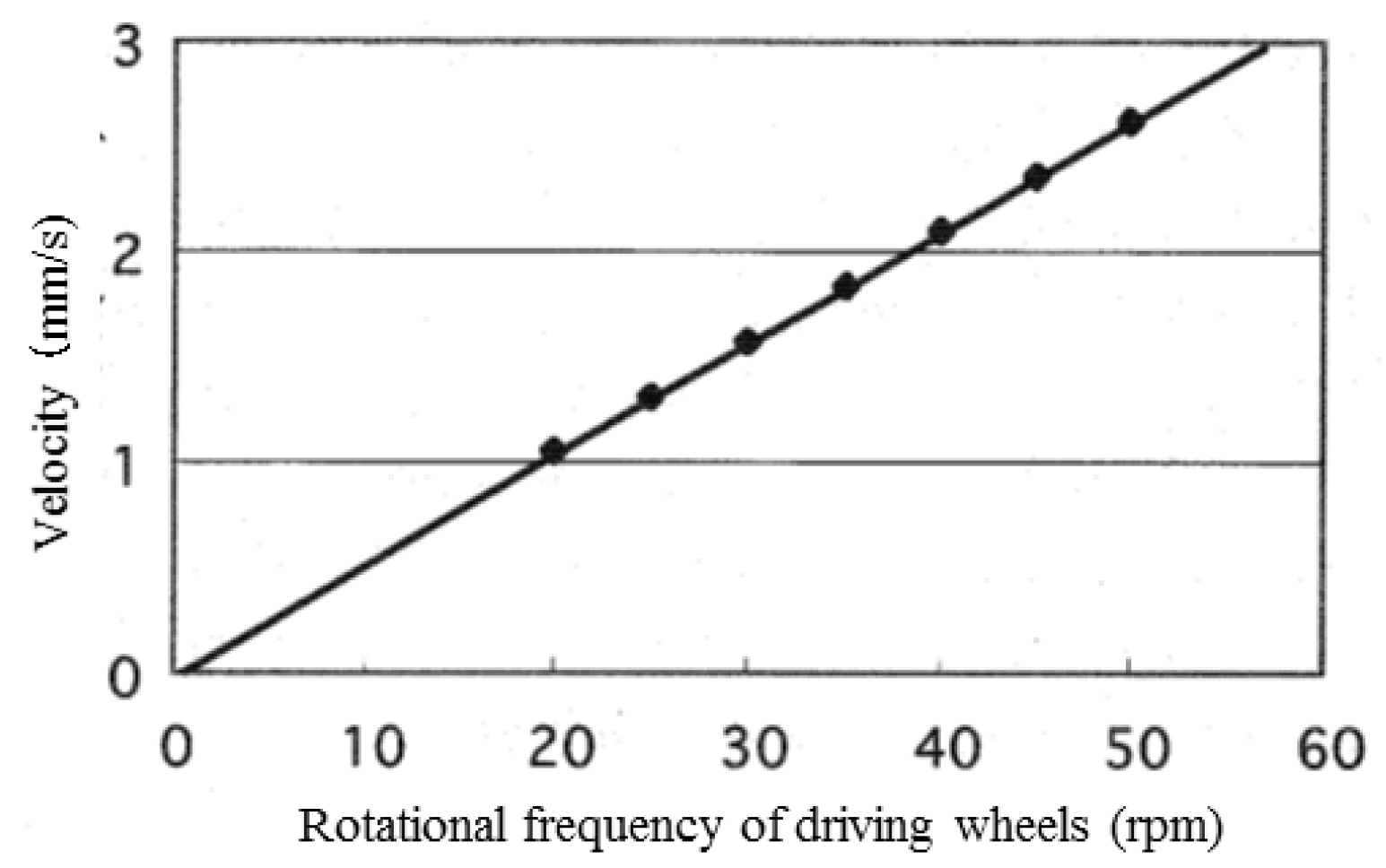
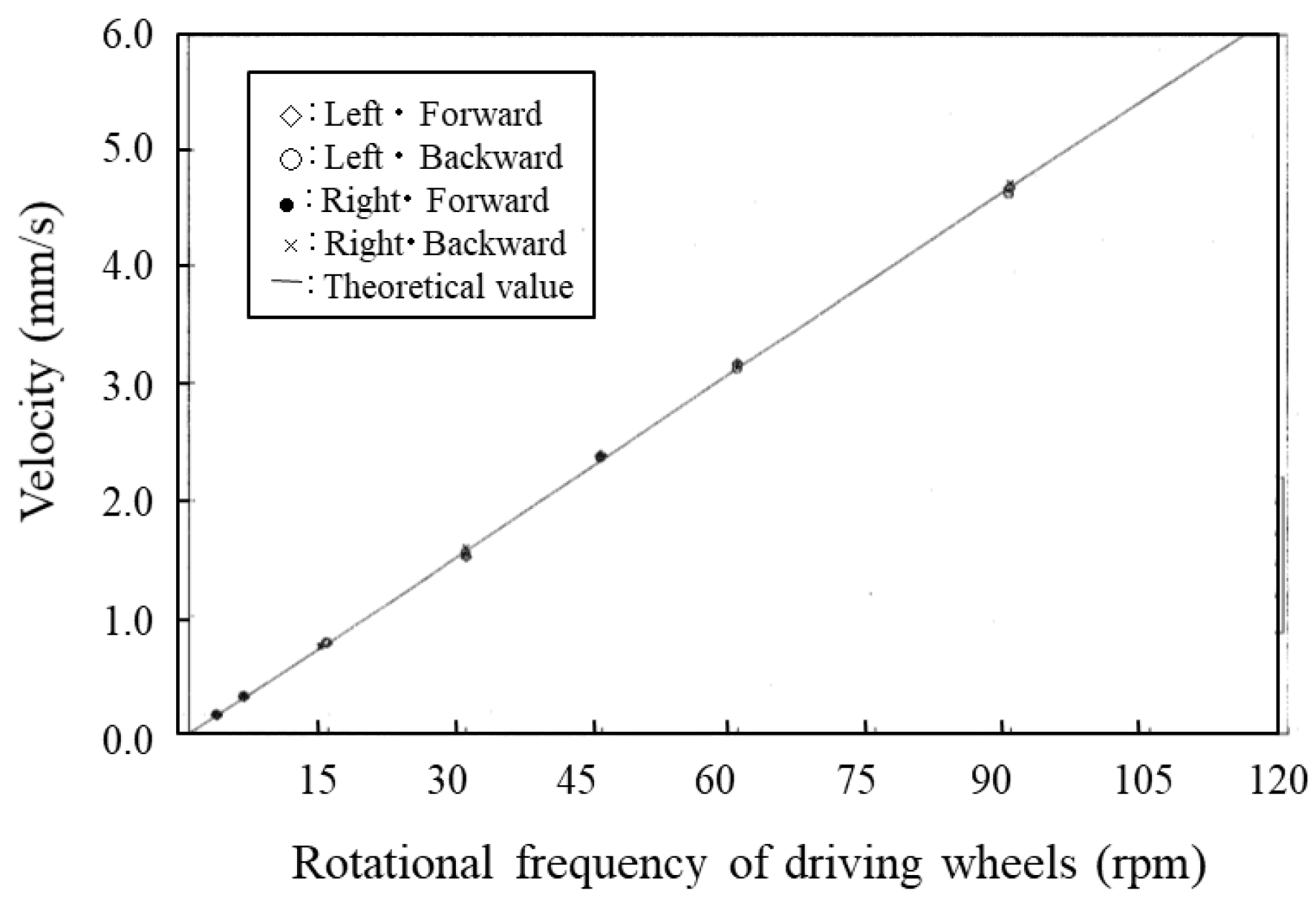
4.4. The Relationship between Microrobot Speed and Rotational Frequency of Driving Wheel
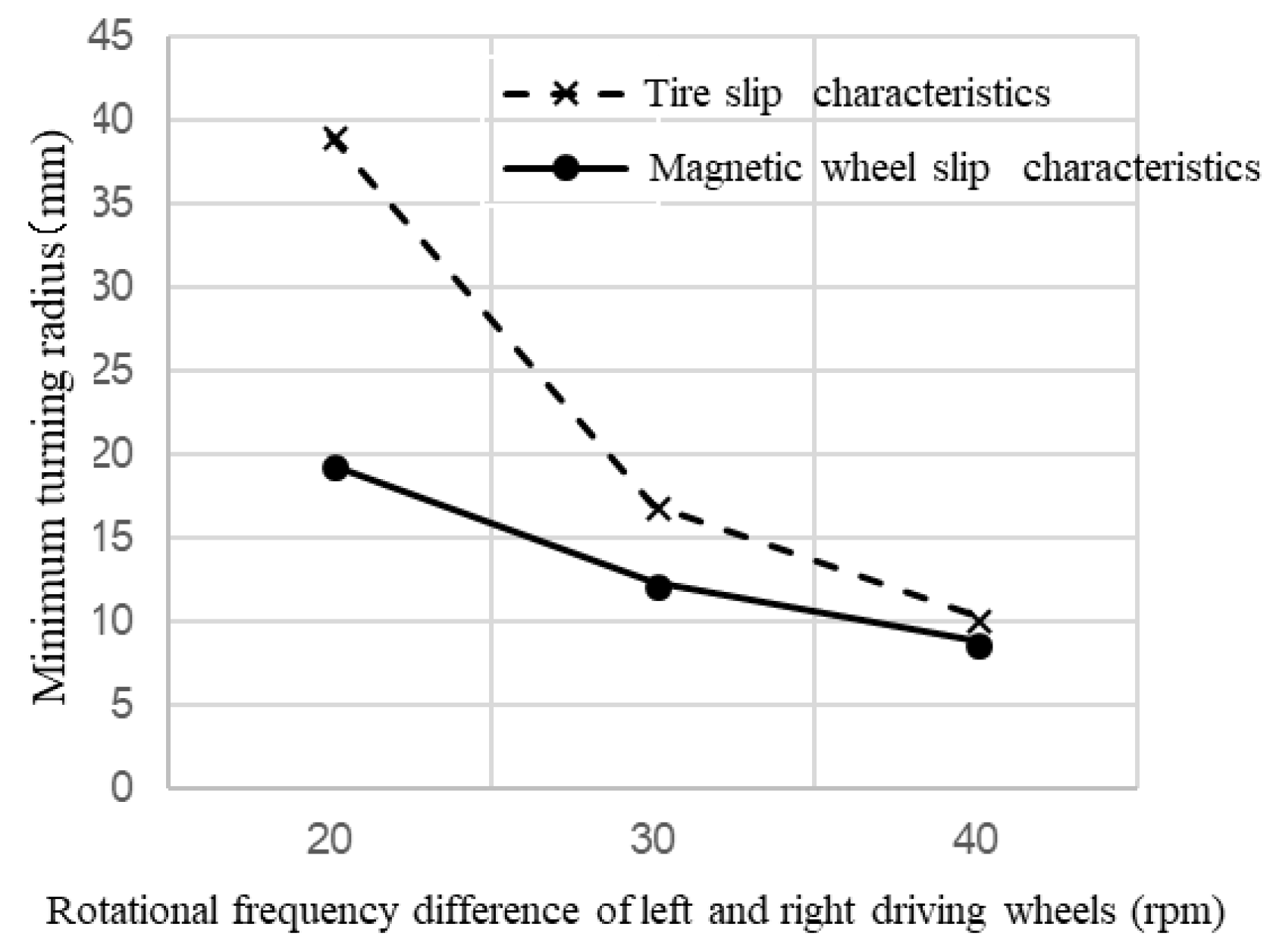
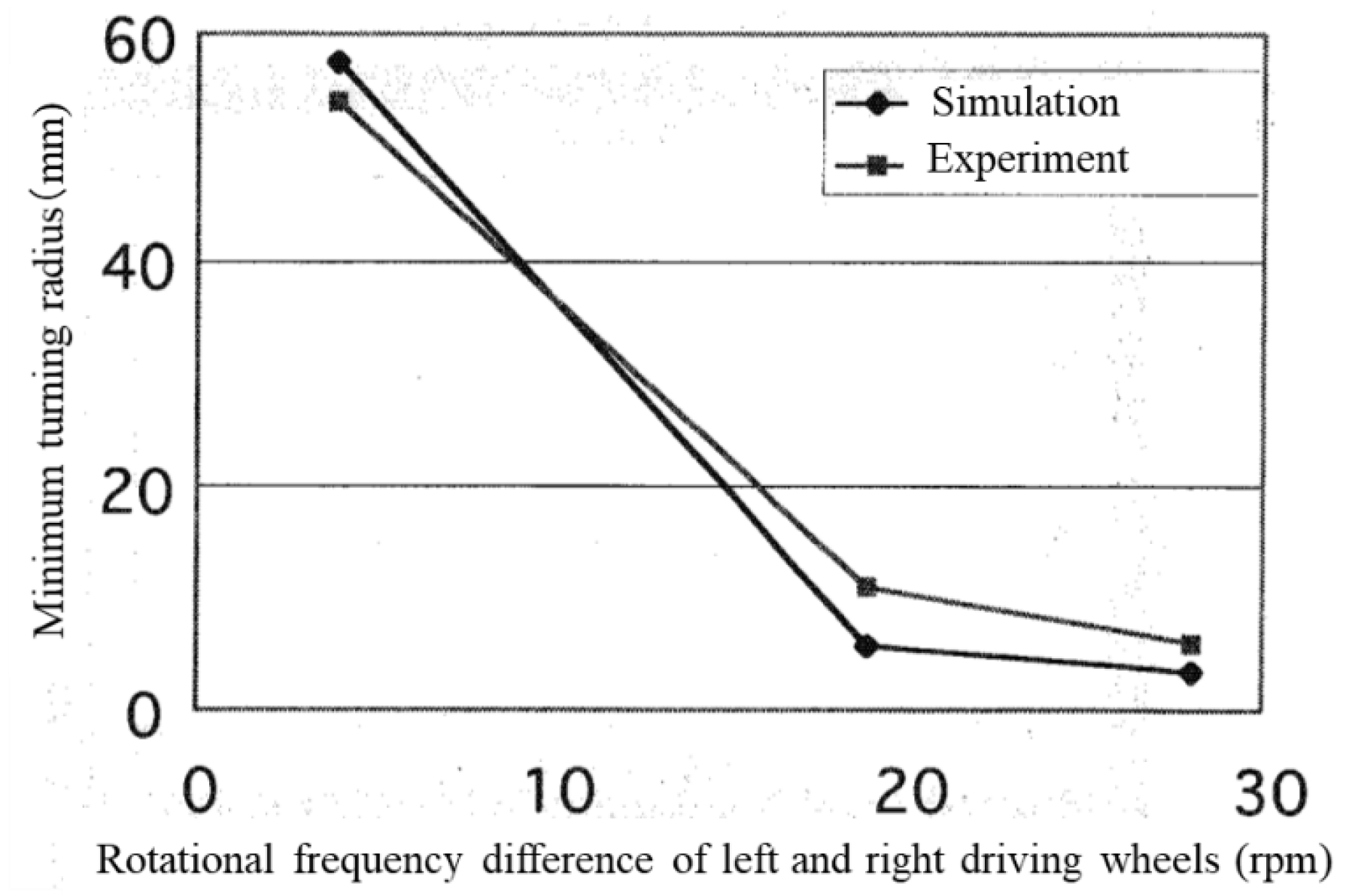
4.5. The Relationship between Minimum Turning Radius and Difference in Rotational Frequency of the Left and Right Driving Wheels
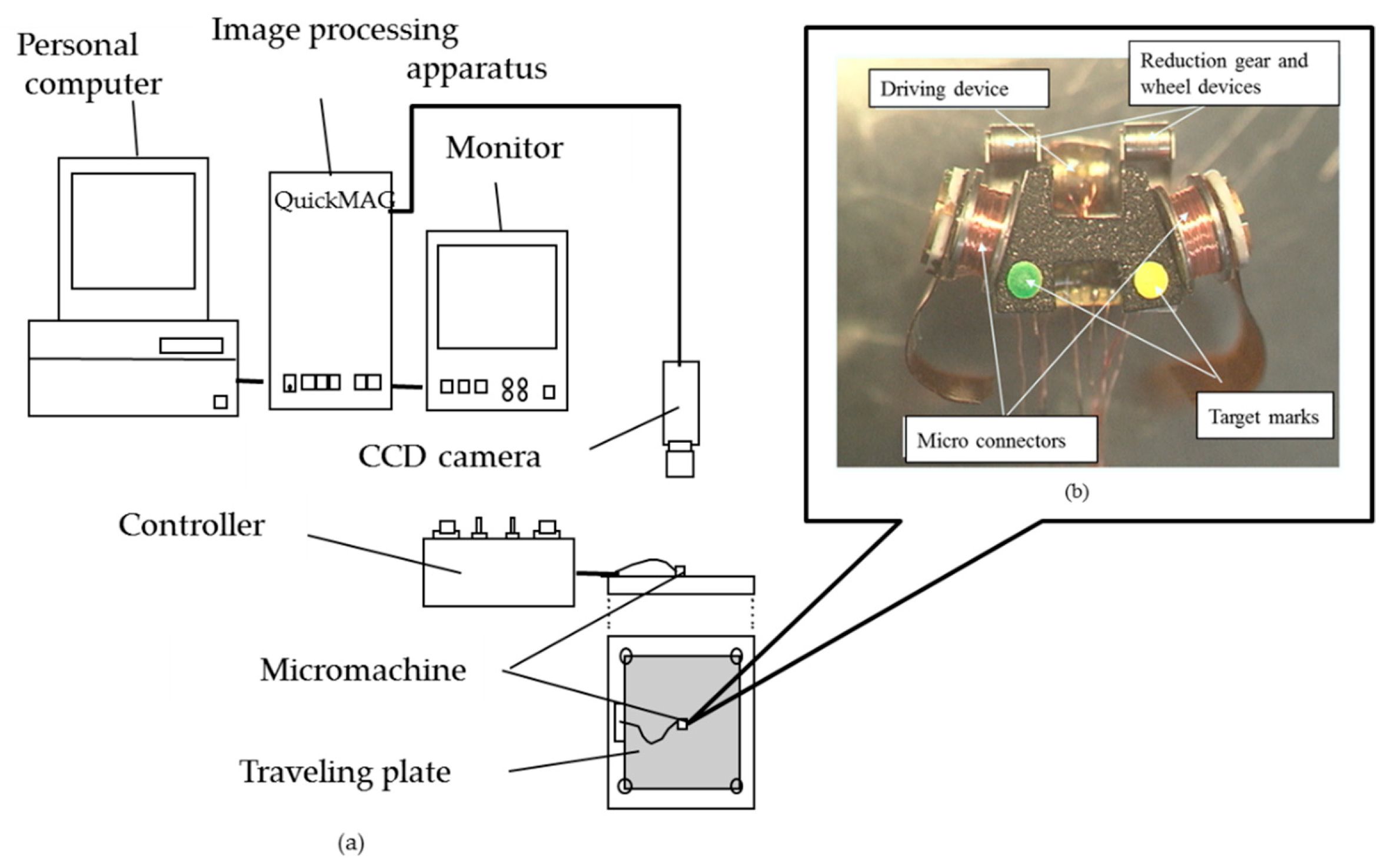
5. Prototype and Evaluation of a Magnetic-Wheeled Microrobot
5.1. Outline of the Prototype
5.2. Horizontal Driving Performance Evaluation System
5.3. Performance-Measurement Results for Straight-Line Movement
5.4. Comparison of Turning Performance between Experiment and Simulation
6. Discussion
6.1. Measurement Results of Forward and Backward Turning Movement
6.2. Comparison of Turning Performance between Column-Type and Barrel-Type Magnetic Wheels
7. Conclusions
- We clarified that driving performance can be improved by using magnetic wheels and giving magnetic attraction equivalent to self-weight to the driving wheels.
- The slip characteristics of column-type and barrel-type magnetic wheels were measured; the results revealed that magnetic wheels do not have the nonlinearity of rubber (tires) because of their hard surfaces.
- A simulator was developed for the slip characteristics of a magnetic wheel and magnetic attraction. The simulation results were consistent with the experimental results.
- Driving performance was different between forward movement and backward movement when turning. It was clarified that the reason was the difference between front-wheel drive and rear-wheel drive.
- The barrel-type wheel had better drive performance than the column-type wheel because of smoother slip characteristics. This tendency was large with a small difference of rotational frequencies of the left and right wheels and decreased with a large difference.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lee, D.; Kim, S.; Park, Y.L.; Wood, R. Design of centimeter-scale inchworm robots with bidirectional claws. In Proceedings of the IEEE International Conference on Robotic and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 3197–3204. [Google Scholar]
- Hariri, H.H.; Soh, G.S.; Foong, H.; Wood, H.L.; Otto, K. Miniature piezoelectric mobile robot driven by standing wave. In Proceedings of the 14th IFToMM World Congress, Taipei, Taiwan, 25–30 October 2015. [Google Scholar]
- Nguyen, A.T.; Martel, S. Locomotion of a miniature robot based on synchronized vibrating actuation mechanisms. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatoronics, Zurich, Germany, 4–7 September 2007. [Google Scholar]
- SRI International. MicroFactory Platform for Smart Manufacturing. 2014. Available online: https://www.sri.com/work/projects/microfactories-for-smart-manufacturing (accessed on 3 June 2019).
- Yu, C.; Kim, J.; Choi, H.; Choi, J.; Jeong, S.; Cha, K.; Park, J.; Park, S. Novel electromagnetic actuation system for three-dimensional locomotion and drilling of intravascular microrobot. Sens. Actuat. A Phys. 2010, 161, 297–304. [Google Scholar] [CrossRef]
- Xie, H.; Sun, M.; Fan, X.; Lin, Z.; Chen, W.; Wang, L.; Dong, L.; He, Q. Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation. Sci. Robot. 2019, 4, eaav8006. [Google Scholar] [CrossRef]
- Saito, K.; Takato, M.; Sekine, Y.; Uchikoba, F. Biomimetics micro robot with active hardware neural networks locomotion control and insect-like switching behavior. Int. J. Adv. Robot. Syst. 2012, 9, 226. [Google Scholar] [CrossRef]
- Dario, P.; Carrozza, M.C.; Stefanini, C.; D’Attanasio, S. A mobile microrobot actuated by a new electromagnetic wobble micromotor. IEEE/ASME Trans. Mechatron. 1998, 3, 9–16. [Google Scholar] [CrossRef]
- Caprari, G.; Balmer, P.; Piguet, R.; Siegwart, R. The autonomous micro robot “alice”: A platform for scientific and commercial applications. In Proceedings of the International Symposium on Micromechatronics and Human Science, Nagoya, Japan, 25–28 November 1998; pp. 231–235. [Google Scholar]
- Kim, J.Y.; Kashino, A.; Colaco, T.; Nejat, G.; Benhabib, B. Design and Implementation of a Millirobot for Swarm Studies- mROBerTO. Robotica 2018, 36, 1591–1612. [Google Scholar] [CrossRef]
- Jin, Y.; Chen, J.; Li, Z. A magnetic wheel structure for an Omni-directional microrobot to limit slip effect. Int. J. Adv. Robot. Syst. 2009, 6, 277–284. [Google Scholar] [CrossRef]
- Tang, X.; Zhang, D.; Li, Z.; Chen, J. An Omni-directional wall-climbing microrobot with magnetic wheels directly integrated with electromagnetic micromotors. Int. J. Adv. Robot. Syst. 2012, 9, 1–9. [Google Scholar] [CrossRef]
- Takeda, M.; Namura, K.; Nakamura, K.; Shibaike, N.; Haga, T.; Takada, H. Development of chain-type micromachine for inspection on outer tube surfaces (basic performance of the 1st prottype). In Proceedings of the 13th IEEE International Conference of Mems, Miyazaki, Japan, 27 January 2000; pp. 90–91. [Google Scholar]
- Wong, J.Y.; Chiang, C.F. A general theory for skid steering of tracked vehicles on firm ground. Proc. Inst. Mechan. Eng. Part D J. Automob. Eng. 2001, 215, 343–355. [Google Scholar] [CrossRef]
- Yi, J.; Song, D.; Zhang, J.; Goodwin, Z. Adaptive trajectory tracking control of skid-steered mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 2605–2610. [Google Scholar]
- Sidek, N.; Sarkar, N. Dynamic modeling and control of nonholonomic mobile robot with lateral slip. In Proceedings of the 7th WSEAS International Conference on Signal Processing, Robotics and Automation, Cancun, Mexico, 13–18 April 2008; pp. 66–74. [Google Scholar]
- Williams, R.L.; Carter, B.E.; Gallina, P.; Rosati, G. Dynamic model with slip for wheeled omnidirectional robots. IEEE Trans. Robot. Automat. 2002, 18, 285–293. [Google Scholar] [CrossRef]
- Ordonez, C.; Gupta, N.; Reese, B.; Seegmiller, N.; Kelly, A.; Collins, E.G., Jr. Learning of skid-steered kinematic and dynamic models for motion planning. Robot. Autonom. Syst. 2017, 95, 207–221. [Google Scholar] [CrossRef]
- Matraji, I.; Al-Durr, A.; Haryono, A.; Al-Wahedi, K.; Abou-Khousa, M. Trajectory tracking control of Skid-Steered Mobile Robot based on adaptive Second Order Sliding Mode Control. Control Eng. Pract. 2018, 73, 167–176. [Google Scholar] [CrossRef]
- Dogru, S.; Marques, L. Improving Dead-Reckoning Performance of Skid-Steered Wheeled Robots Using an Improved Kinematic Model. In Proceedings of the Third Iberian Robotics Conference, Seville, Spain, 12 November 2017; pp. 228–239. [Google Scholar]
- Pacejka, H.B.; Bakker, E. The MAGIC formula tire model. In Proceedings of the of the 1st International Colloquium on Tire Models for Vehicle Dynamics Analysis, Supplement to Vehicle System Dynamics, Delft, The Netherlands, 21–22 October 1992; Volume 21, pp. 1–18. [Google Scholar]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takeda, M.; Shimoyama, I. Slip and Magnetic Attraction Effects in a Microrobot with Magnetic-Wheels and Skid-Steering. Micromachines 2019, 10, 379. https://doi.org/10.3390/mi10060379
Takeda M, Shimoyama I. Slip and Magnetic Attraction Effects in a Microrobot with Magnetic-Wheels and Skid-Steering. Micromachines. 2019; 10(6):379. https://doi.org/10.3390/mi10060379
Chicago/Turabian StyleTakeda, Munehisa, and Isao Shimoyama. 2019. "Slip and Magnetic Attraction Effects in a Microrobot with Magnetic-Wheels and Skid-Steering" Micromachines 10, no. 6: 379. https://doi.org/10.3390/mi10060379