Experimental Flight Patterns Evaluation for a UAV-Based Air Pollutant Sensor

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
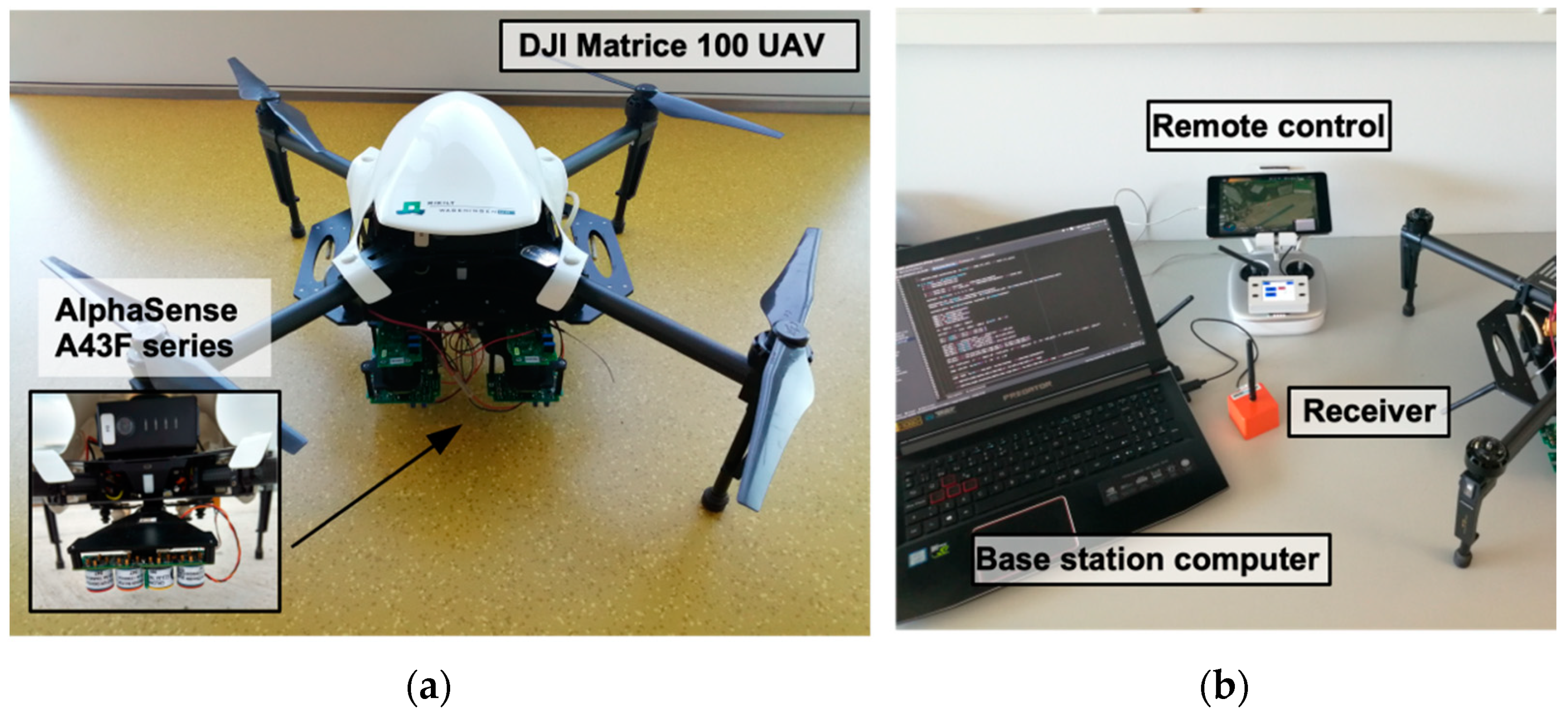
2.1. Unmanned Aerial Vehicle(UAV) Set-up
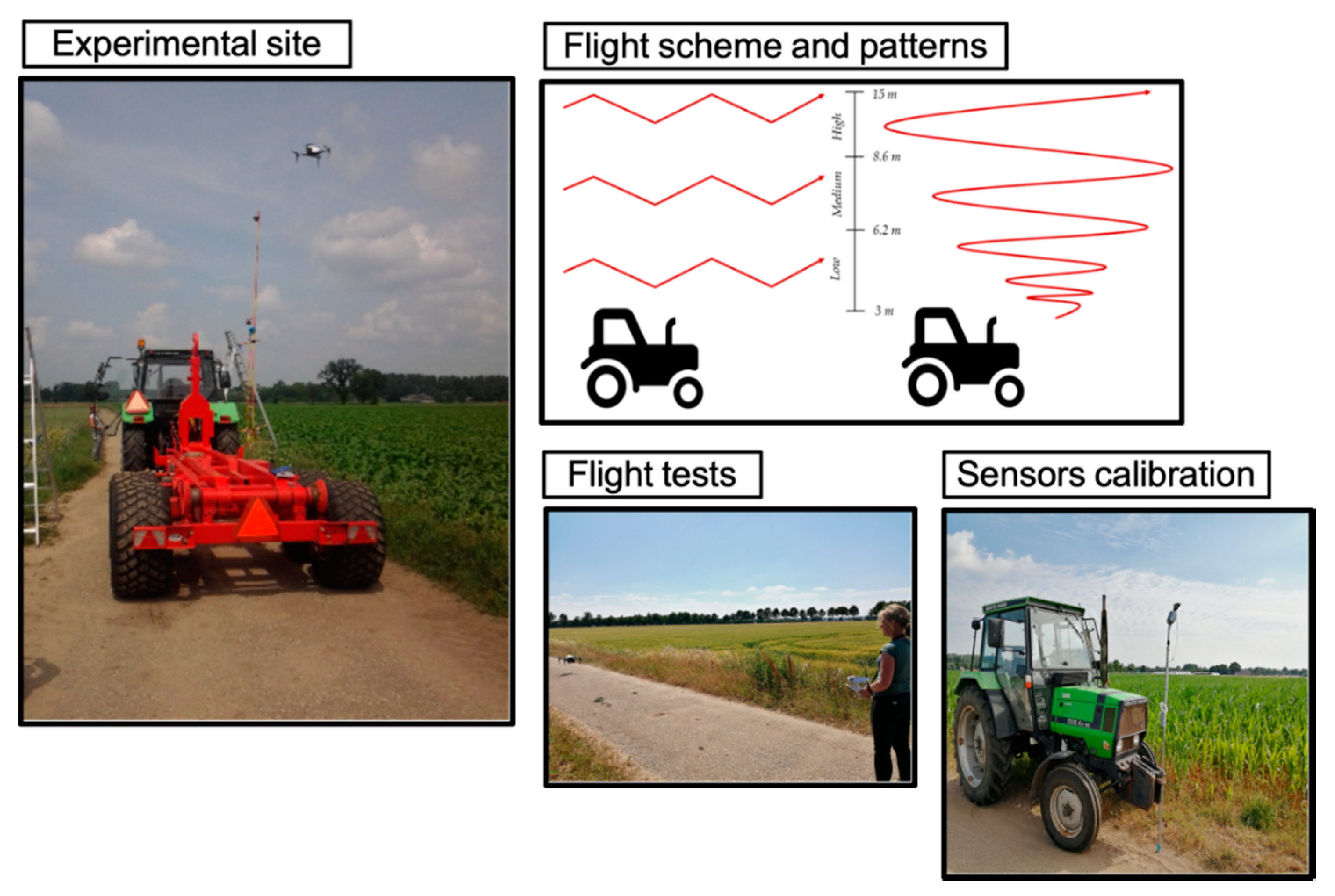
2.2. Experimental Design
2.3. Flight Patterns
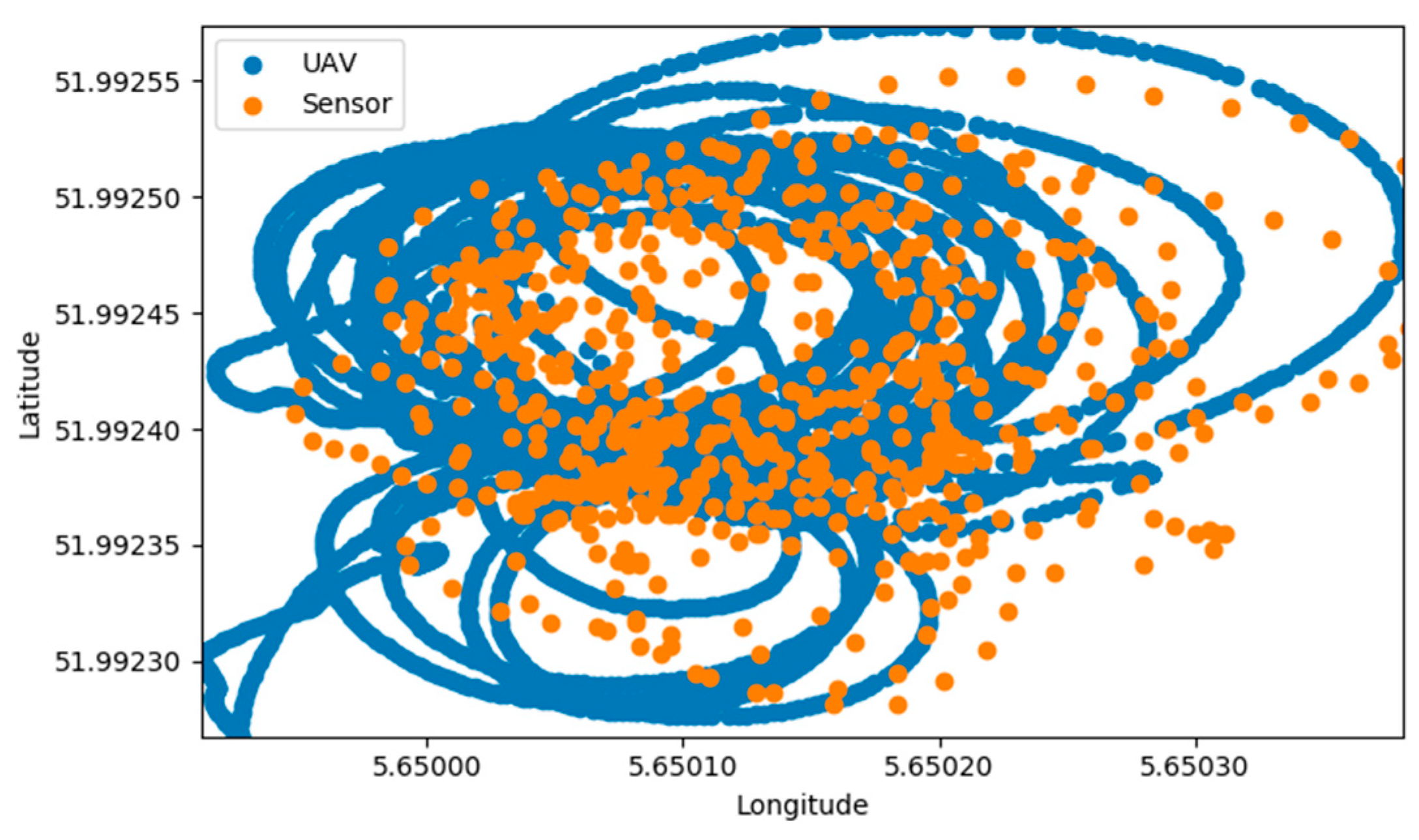
2.4. Data Pre-Processing
3. Results
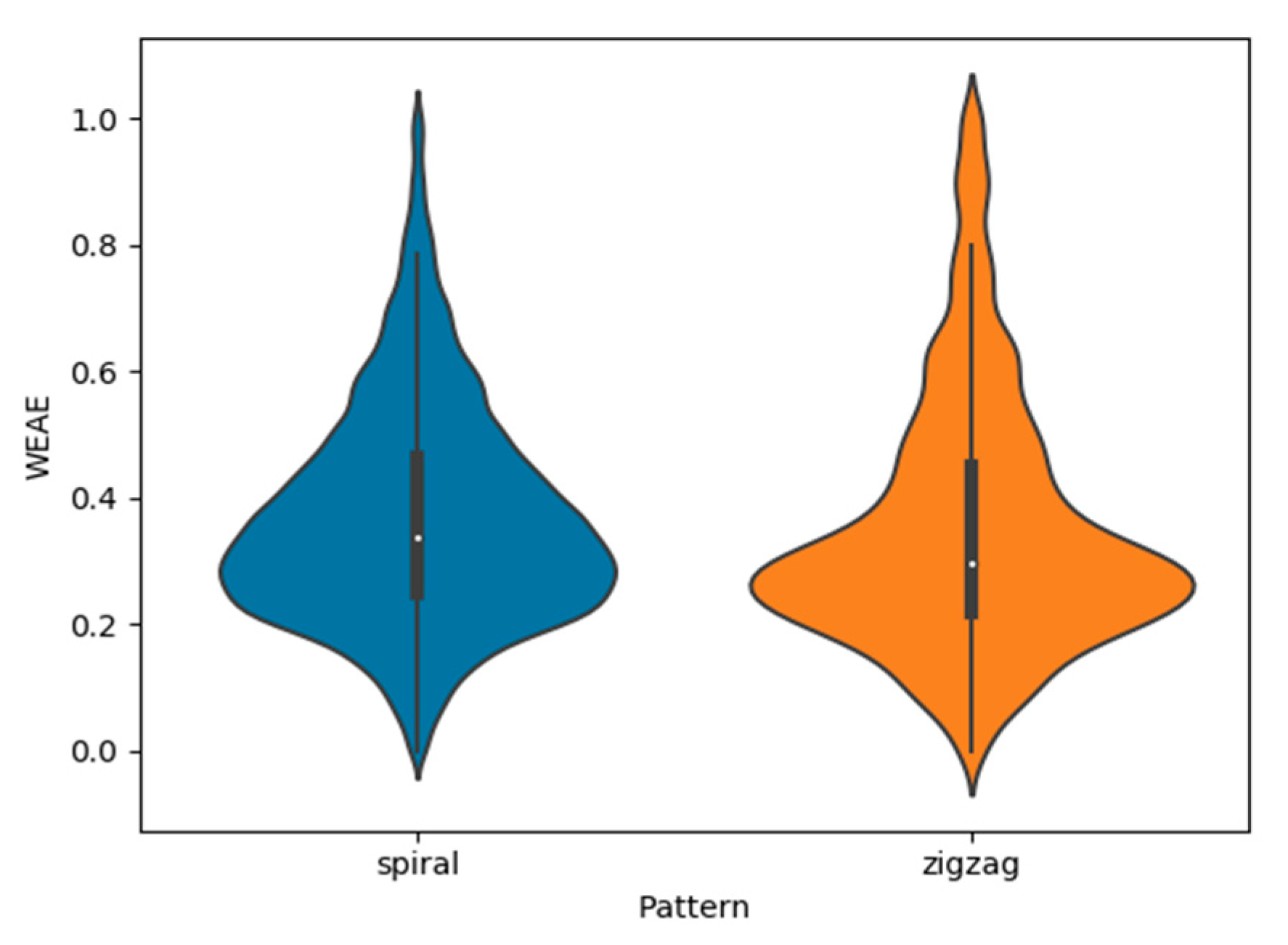
3.1. Flight Pattern
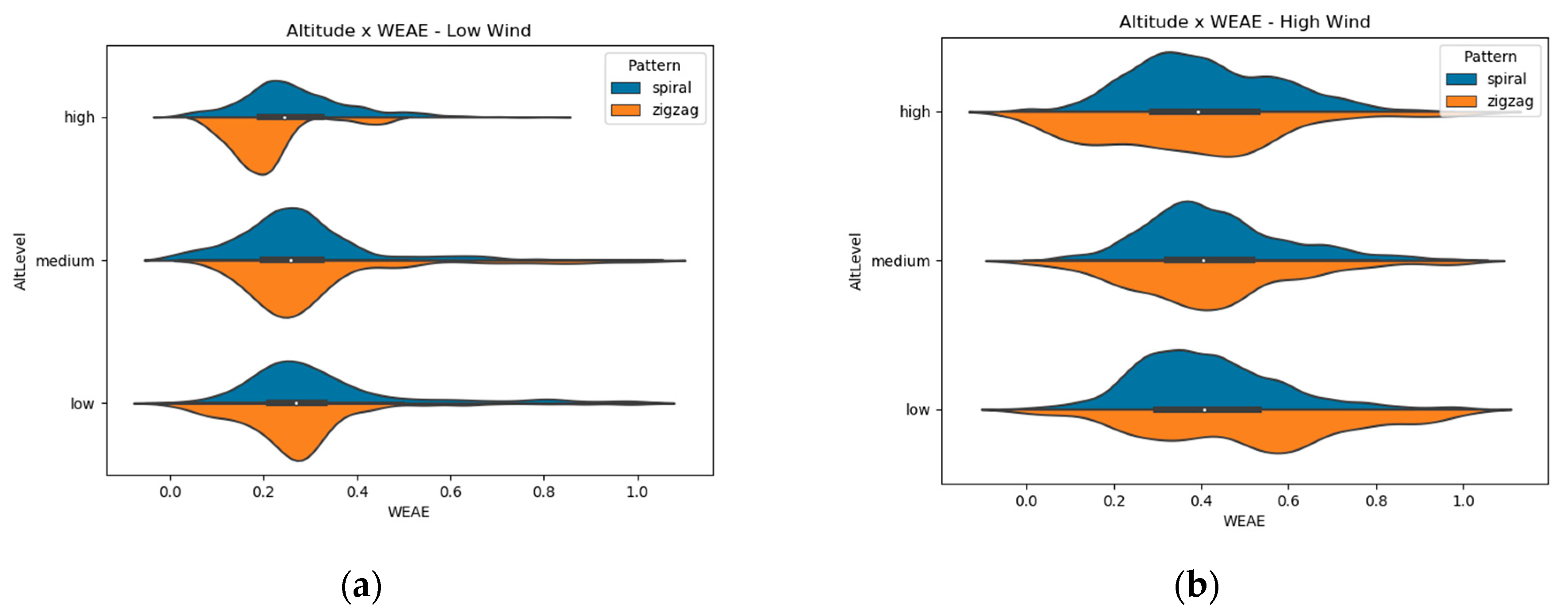
3.2. Wind Speed
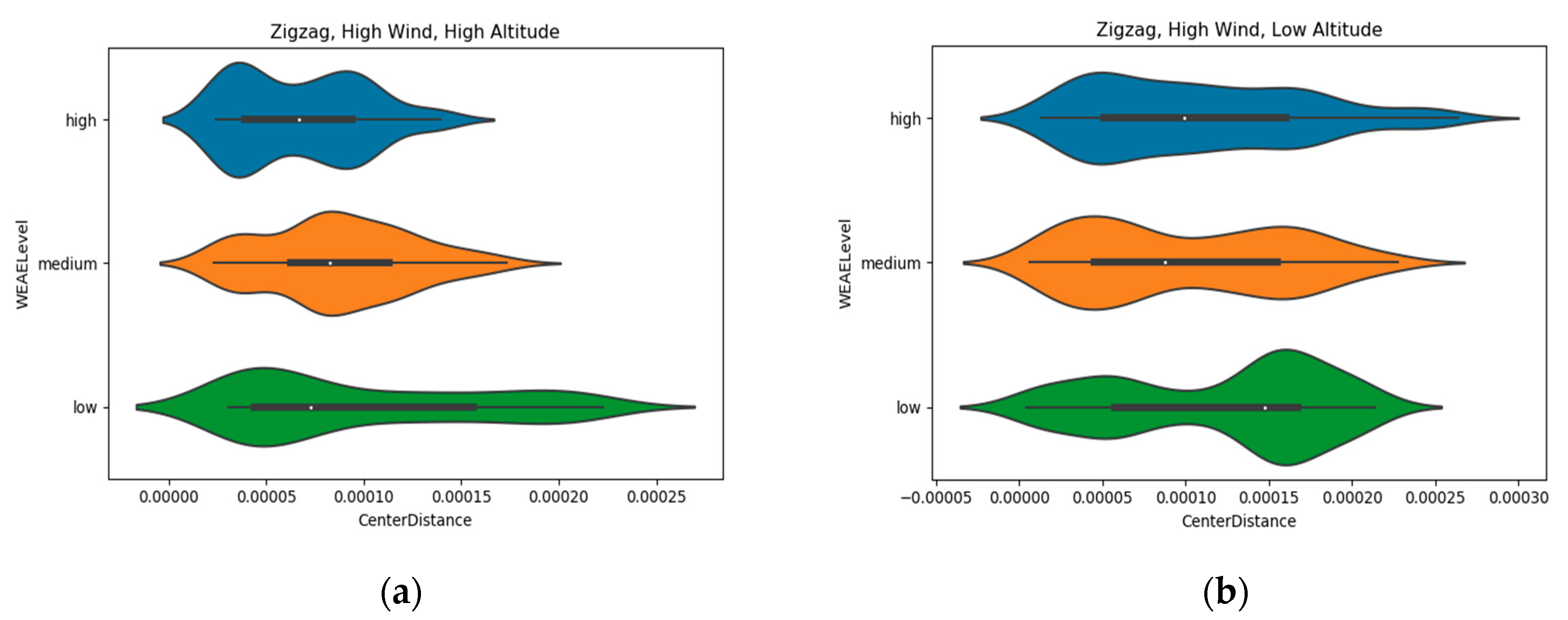
3.3. Altitude
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Existing Legislation-Air Quality-Environment-European Commission. Available online: https://ec.europa.eu/environment/air/quality/existing_leg.htm (accessed on 27 April 2020).
- Review of the EU Air Policy-Environment-European Commission. Available online: https://ec.europa.eu/environment/air/clean_air/index.htm (accessed on 27 April 2020).
- EEA. Air Pollution Fact Sheet 2014 Netherlands; EEA: Copenhagen, Denmark, 2014. [Google Scholar]
- Air | RIVM. Available online: https://www.rivm.nl/en/air (accessed on 28 April 2020).
- Air Pollution in Netherlands: Real-Time Air Quality Index Visual Map. Available online: https://aqicn.org/map/netherland/ (accessed on 28 April 2020).
- Nguyen, T.; Duong Bang, D.; Wolff, A. 2019 Novel Coronavirus Disease (COVID-19): Paving the Road for Rapid Detection and Point-of-Care Diagnostics. Micromachines 2020, 11, 306. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Air Quality and COVID-19—European Environment Agency. Available online: https://www.eea.europa.eu/themes/air/air-quality-and-covid19 (accessed on 28 April 2020).
- Han, S.; Bian, H.; Feng, Y.; Liu, A.; Li, X.; Zhang, X. Analysis of the Relationship between O3, NO and NO2 in Tianjin, China. Aerosol Air Qual. Res. 2011, 11, 128–139. [Google Scholar] [CrossRef] [Green Version]
- Valente, J.; de Man, I.; Kooistra, L. Validation of a small flying e-nose system for air pollutants control: A plume detection case study from an agricultural machine. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 1993–1998. [Google Scholar]
- Zhu, S.; Li, X.; Yu, C.; Wang, H.; Wang, Y.; Miao, J. Spatiotemporal Variations in Satellite-Based Formaldehyde (HCHO) in the Beijing-Tianjin-Hebei Region in China from 2005 to 2015. Atmosphere 2018, 9, 5. [Google Scholar] [CrossRef] [Green Version]
- Weber, K.; Heweling, G.; Fischer, C.; Lange, M. The use of an octocopter UAV for the determination of air pollutants—A case study of the traffic induced pollution plume around a river bridge in Duesseldorf, Germany. Int. J. Environ. Sci. 2017, 2, 63–68. [Google Scholar]
- Fahlstrom, P.G.; Gleason, T.J. Introduction to UAV Systems, 4th ed.; John Wiley and Sons: Chichester, UK, 2012; ISBN 9781119978664. [Google Scholar]
- Rüdiger, J.; Tirpitz, J.-L.; de Moor, J.M.; Bobrowski, N.; Gutmann, A.; Liuzzo, M.; Ibarra, M.; Hoffmann, T. Implementation of electrochemical, optical and denuder-based sensors and sampling techniques on UAV for volcanic gas measurements: Examples from Masaya, Turrialba and Stromboli volcanoes. Atmos. Meas. Tech. 2018, 11, 2441–2457. [Google Scholar] [CrossRef] [Green Version]
- Valente, J.; Almeida, R.; Kooistra, L. A Comprehensive Study of the Potential Application of Flying Ethylene-Sensitive Sensors for Ripeness Detection in Apple Orchards. Sensors 2019, 19, 372. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Riley, E.A.; Schaal, L.N.; Sasakura, M.; Crampton, R.; Gould, T.R.; Hartin, K.; Sheppard, L.; Larson, T.; Simpson, C.D.; Yost, M.G. Correlations between short-term mobile monitoring and long-term passive sampler measurements of traffic-related air pollution. Atmos. Environ. 2016, 132, 229–239. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karion, A.; Sweeney, C.; Pétron, G.; Frost, G.; Michael Hardesty, R.; Kofler, J.; Miller, B.R.; Newberger, T.; Wolter, S.; Banta, R.; et al. Methane emissions estimate from airborne measurements over a western United States natural gas field. Geophys. Res. Lett. 2013, 40, 4393–4397. [Google Scholar] [CrossRef]
- Van der A., R. Tropospheric Emission Monitoring Internet Service. Available online: https://ui.adsabs.harvard.edu/abs/2010EGUGA..12.9953V/abstract (accessed on 16 July 2020).
- Rizzato, S.; Leo, A.; Monteduro, A.G.; Chiriacò, M.S.; Primiceri, E.; Sirsi, F.; Milone, A.; Maruccio, G. Advances in the development of innovative sensor platforms for field analysis. Micromachines 2020, 11, 491. [Google Scholar] [CrossRef] [PubMed]
- Neumann, P.P.; Bennetts, V.H.; Lilienthal, A.J.; Bartholmai, M. From insects to micro air vehicles—A comparison of reactive plume tracking strategies. In Advances in Intelligent Systems and Computing; Springer: New York, NY, USA, 2015; Volume 302, pp. 1533–1548. [Google Scholar]
- Berg, N.; Mellqvist, J.; Jalkanen, J.P.; Balzani, J. Ship emissions of SO 2 and NO 2: DOAS measurements from airborne platforms. Atmos. Meas. Tech. 2012, 5, 1085–1098. [Google Scholar] [CrossRef] [Green Version]
- Malaver, A.; Gonzalez, F.; Motta, N.; Depari, A.; Corke, P. Towards the Development of a Gas Sensor System for Monitoring Pollutant Gases in the low Troposphere Using Small Unmanned Aerial Vehicles. Available online: https://eprints.qut.edu.au/52042/1/Malaver_A_Gas_sensor_system_for_a_UAV_environmental_monitoring_WREM_Sidney_11072012.pdf (accessed on 10 July 2020).
- Roldán, J.J.; Joossen, G.; Sanz, D.; del Cerro, J.; Barrientos, A. Mini-UAV based sensory system for measuring environmental variables in greenhouses. Sensors 2015, 15, 3334–3350. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Villa, T.F.; Salimi, F.; Morton, K.; Morawska, L.; Gonzalez, F. Development and validation of a UAV based system for air pollution measurements. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, H.S.; Song, C.H.; Park, R.S.; Huey, G.; Ryu, J.Y. Investigation of ship-plume chemistry using a newly-developed photochemical/dynamic ship-plume model. Atmos. Chem. Phys. 2009, 9, 7531–7550. [Google Scholar] [CrossRef] [Green Version]
- Neumann, P.P.; Hernandez Bennetts, V.; Lilienthal, A.J.; Bartholmai, M.; Schiller, J.H. Gas source localization with a micro-drone using bio-inspired and particle filter-based algorithms. Adv. Robot. 2013, 27, 725–738. [Google Scholar] [CrossRef]
- Villalobos, F.J.; Fereres, E. Principles of Agronomy for Sustainable Agriculture; Springer: New York, NY, USA, 2016; ISBN 978-3-319-46115-1. [Google Scholar]
- Cabreira, T.M.; Brisolara, L.B.; Ferreira, P.R., Jr. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Mijling, B.; Jiang, Q.; de Jonge, D.; Bocconi, S. Field calibration of electrochemical NO2 sensors in a citizen science context. Atmos. Meas. Tech. 2018, 11, 1297–1312. [Google Scholar] [CrossRef] [Green Version]
- Peng, Z.R.; Wang, D.; Wang, Z.; Gao, Y.; Lu, S. A study of vertical distribution patterns of PM2.5 concentrations based on ambient monitoring with unmanned aerial vehicles: A case in Hangzhou, China. Atmos. Environ. 2015, 123, 357–369. [Google Scholar] [CrossRef]
- Khaliq, A.A. Gas Dispersal Simulation in ROS. Master’s Thesis, Orebro University, Orebro, Sweden, 2011. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Day | Start | End | Temperature | Humidity | Wind Speed | Wind Direction |
|---|---|---|---|---|---|---|
| June 15 | 09:54 | 14:01 | 24 °C | 70% | 0.0–2.9 m s−1 | NE |
| June 20 | 09:35 | 13:06 | 20 °C | 79% | 2.1–5.3 m s−1 | NE |
| Trial | Wind Level (m·s−1) | WEAE Level (0–1) | Altitude Level (m) | ||||
|---|---|---|---|---|---|---|---|
| Low | Medium | High | Low | Medium | High | ||
| Spiral 1 | Low (0.0–2.9) | 0.0–0.26 | 0.27–0.38 | 0.39–1.0 | 3.0–6.2 | 6.3–8.6 | 8.7–15.0 |
| Spiral 2 | 0.0–0.23 | 0.23–0.29 | 0.29–1.0 | ||||
| Spiral 3 | 0.0–0.19 | 0.19–0.25 | 0.26–1.0 | ||||
| Zigzag 1 | 0.0–0.17 | 0.17–0.25 | 0.26–1.0 | ||||
| Zigzag 2 | 0.0–0.26 | 0.26–0.30 | 0.30–1.0 | ||||
| Spiral 1 | High (2.1–5.3) | 0.0–0.35 | 0.35–0.48 | 0.48–1.0 | |||
| Spiral 2 | 0.0–0.28 | 0.28–0.38 | 0.38–1.0 | ||||
| Spiral 3 | 0.0–0.41 | 0.41–0.54 | 0.54–1.0 | ||||
| Zigzag 1 | 0.0–0.30 | 0.30–0.50 | 0.51–1.0 | ||||
| Zigzag 2 | 0.0–0.25 | 0.25–0.35 | 0.39–1.0 | ||||
| Zigzag 3 | 0.0–0.44 | 0.44–0.62 | 0.63–1.0 | ||||
| Average | 0.0–0.28 | 0.29–0.39 | 0.40–1.0 | ||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Araujo, J.O.; Valente, J.; Kooistra, L.; Munniks, S.; Peters, R.J.B. Experimental Flight Patterns Evaluation for a UAV-Based Air Pollutant Sensor. Micromachines 2020, 11, 768. https://doi.org/10.3390/mi11080768
Araujo JO, Valente J, Kooistra L, Munniks S, Peters RJB. Experimental Flight Patterns Evaluation for a UAV-Based Air Pollutant Sensor. Micromachines. 2020; 11(8):768. https://doi.org/10.3390/mi11080768
Chicago/Turabian StyleAraujo, João Otávio, João Valente, Lammert Kooistra, Sandra Munniks, and Ruud J. B. Peters. 2020. "Experimental Flight Patterns Evaluation for a UAV-Based Air Pollutant Sensor" Micromachines 11, no. 8: 768. https://doi.org/10.3390/mi11080768
APA StyleAraujo, J. O., Valente, J., Kooistra, L., Munniks, S., & Peters, R. J. B. (2020). Experimental Flight Patterns Evaluation for a UAV-Based Air Pollutant Sensor. Micromachines, 11(8), 768. https://doi.org/10.3390/mi11080768