1. Introduction
In power electronics, DC-DC power converters are essential components in both industrial and day-to-day applications, for instance, fuel and photovoltaic cells [
1,
2], hybrid vehicles [
3], mobile devices [
4,
5], and many others (see [
6] for a review on recent applications).
In particular, the step-down or buck converter is of special interest for the power supply of electronic devices. For this reason, a wide variety of controllers have been proposed for this converter [
7], which provide suitable solutions for a particular design purpose: for instance, sliding mode control [
8] allows for the robust operation of the converter to unmodeled dynamics, PID based controllers in averaged models [
9] enables the use of well-established linear feedback theory and controllers designed using contraction theory can guarantee global stability of the converter [
10], just to mention few. However, several modern applications of the buck converter have the specific requirement of fast dynamic response, which is not always guaranteed with the designs that are mentioned above. For example, in Dynamic Voltage Scaling (DVS) [
11] and RF amplification [
12], it is essential that the output of the converter is reached as fast as possible.
The problem of driving the system towards a desired operation point in minimum time is regarded as the Time-optimal control problem. Time optimal problems can be solved using the Pontryagin’s maximum principle [
13,
14] and this approach has been extensively used in order to minimize transient behavior in power converters, allowing to find optimal switching surfaces in the boost converter [
15], the buck-boost [
16], and the buck converter itself in some particular conditions of operation [
11,
17]. An important question in the time-optimal problem is: given an initial condition, is the system able to reach the target state with a single-switching in optimal time (SSOT for short), before shifting to the use of the high-frequency controller to maintain the system in the vicinity of the desired point?. Indeed, a comprehensive analytic study on the conditions under which the buck, boost, and buck-boost topologies are able to evolve their dynamics in a single switch was first investigated in [
18]. However, it was only possible to draw conclusions on the number of switches required to reach the desired output for the buck converter in a low resistance (high load) regime where the dynamics of the buck converter behaves as an overdamped system and the Pontryagin’s maximum principle allows for a straightforward analysis.
Nevertheless, any important applications of the buck converter are associated with low output currents where the dynamics of the buck converter may behave as an underdamped oscillator [
19]. The voltage specifications of mobile devices working in stand by mode is a prominent example of an application of the buck converter in the light load regime, where the efficiency of the converter is of utter importance for minimizing the battery drain [
20,
21,
22,
23].
The problem of constructing a-priori the subset of the state space that guarantees SSOT transitions remains an open problem for the buck power converter in the low load regime. In this paper, we aim to construct such a subset based on the knowledge of the dynamical properties of the system, that can be easily exploited in canonically transformed coordinates. For this purpose, the paper is organized as follows: in
Section 2, we present the mathematical preliminaries associated to time-optimal control and the description of the synchronous buck power converter. In
Section 3, we formalize the statement of the problem and develop a geometrical framework to find the region of the state space where it is possible to reach output in optimal time with a single switching action. Moreover, in
Section 4, we present some practical implementation examples where we make use of the derived expressions for time optimal regions. Additionally, we present numerical simulations showing the performance of the proposed control in
Section 5 and discuss some final remarks in
Section 6.
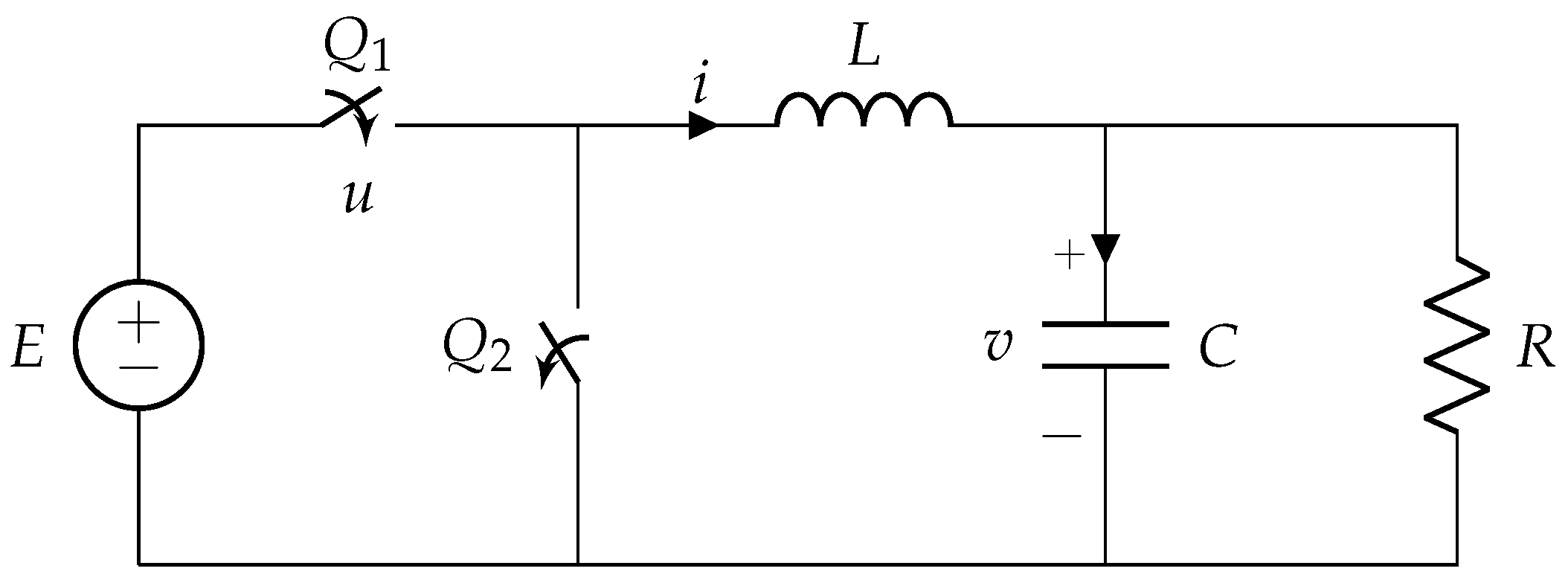
3. Single-Switching in Optimal Time (SSOT) Region in the Buck Converter
In a buck power converter, we are interested in driving the system towards an operation point given by:
with
.
is such that
From a practical point of view,
, the values that are outside this range are usually not desired. Moreover, we are only interested in values of
, leading to a focus-type of dynamics. To this end, we shall define the area of the state space that include the set of all possible desired points given the restrictions above as
:
An schematic illustration of
is shown in
Figure 2a.
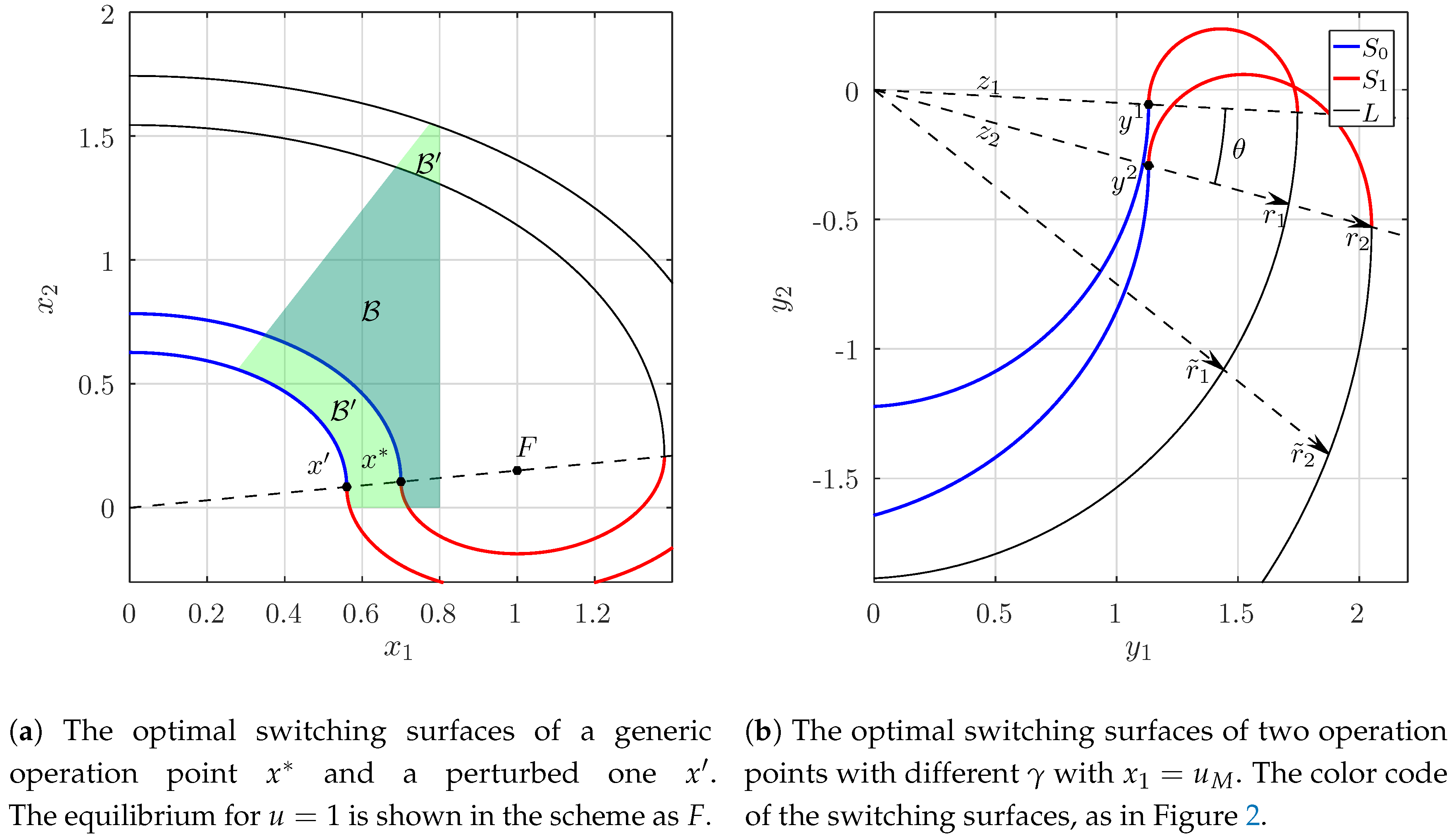
We will focus on the case in which the system is operating at a given point and, due to a variation in the system’s parameters, we need to drive the dynamics towards a new operation point in a single switching action. With this, we are effectively disregarding far from equilibrium dynamics and restricting our analysis to the subset which can be time-optimally driven into itself with a single commutation ( or viceversa). This subset will depend on the changes of and .
Let us focus on
Figure 2b and the generic operation point denoted by
. This point can only be reached via a trajectory with
or with
. The parts of the trajectories that reach
in less than
define indeed the optimal switching surface composed by the trajectory segments
and
.
In order to construct the
set, let us integrate backwards in time during
starting from
and
. This generates the switching surface
. For the trajectory to be time optimal, the control action cannot be active for more than
, therefore, further backward integration has to be made with
leading to the trajectory segment
L, as stated in
Section 2.2. A similar construction can be performed starting with
, which generates the switching surface
by backwards integration during
. Nevertheless, it turns out that the furthest point of
, denoted in the scheme as
P will always lay in the third quadrant for any operation point
in
. For this reason, the construction described before, divides the set
in three sets:
(see
Figure 2b). The set
turns out to be empty for some operation points
, and will be of interest later.
Now, starting from any point of the region , the point can be reached with a control sequence (i.e., with a single switching). Every trajectory initiated by starting at any point in will intersect the switching surface in time and, consequently, reach in optimal time . In a similar way, if an initial point lays within the set then the optimal control is the sequence .
The last set
contains the points that require
two switches to reach
in optimal time in the following way:
with some positive
. To any operation point
x we define the corresponding set
as depicted in the Figure (note, that the set
could be empty for some
x). Our task now is to calculate the union
which define the inadmissible set. The
admissible set
will then be
.
With the aim of finding
, we will apply the following canonical transformation to the system (
3) with a properly calculated matrix
P:
in such a way to represent the system in the canonical form
where
and
. With this transformation, it is easy to see that, for
(corresponding to the case in which equilibrium is at the origin), the radial distance of the points along any trajectory of the system can be expressed in polar coordinates as
Similarly, when
, the equilibrium is now translated to the point
and radius of each point in the trajectory is also given by (
17) measured from
F.
As stated before, the switching surface
is also a trajectory with a focus in
F. Since the equilibrium point
lays along the line
it can be expressed as
(see
Figure 3a). Now, let us define the new operation point
with
, with polar coordinates
and
. With these considerations the following quotient is always guaranteed to be larger than 1:
This implies that the switching surface
, which corresponds to the optimal surface for
, is always at the interior (respect to the focus
F) of the switching surface
. Let us build the sets
and
, which correspond to the operation point
in the same manner as
were built for
(see
Figure 3a). From (
18) we deduce that
and, consequently,
.
Using this fact, and recalling Equation (
14) we obtain:
This means that we are able to construct the set
only by making use of the operation points laying on the line
.
Next, we show that
can be calculated by making use of a single operation point on the line
, corresponding to the smallest value of the load, namely
. To do this, we need to demonstrate that given two points
of
, it turns out that
Let
and
be chosen as from Equation (
20). Let us pass to the canonically transformed system via the matrix
according to Equation (
15). We now prove that, for every ray from
O, the radial distance
to the point of the trajectory
L of
is always smaller than
—that of
(see
Figure 3b). Since
, and so
, we can estimate the quotient between those two distances, as follows:
where
are the initial radii and
the angle, see
Figure 3b. Accordingly, it is sufficient to show
.
Secondly, we define the vector
, which points to the focus that generates the switching surface
. Under the canonical transformation
is mapped to
. Therefore, the radial distance
to the endpoint of
can be expressed as
Here, we used the fact that the vectors to the endpoints of the surfaces
and corresponding vectors
are colinear. Similarly, for the vector
, which points to the focus generating the switching surface
, is mapped to
and the radial distance
is:
where
is the angle between
and
:
and
Therefore, we have:
After the application of the mean value theorem and some straightforward algebra it can be seen that for every
, the r.h.s of Equation (
25) leads to
. From this inequality, it is concluded that the set
constructed with the operation point with the smallest possible
contains all of the inadmissible regions of operation points with larger
:
Hence, the set
(see Equation (
19)) is built using the optimal trajectory passing through
:
Now, we are left with approximating the admissible region
which can be made calculating the intersection of
L with the boundaries of the region
, which we denote with the points
and
(see
Figure 4a). Let us start with
the intersection between
L and the segment
with
. One can verify that the coordinate
can be expressed as:
Similarly,
can be obtained by solving the angle
, when the
coordinate of the point in the trajectory
L reaches
. This can be found by solving the following equation with respect to
:
where
. Substituting the expressions for
and
P we obtain:
Let the solution of
in Equation (
31) be
, this allows for us to express the coordinates of
as
Once
and
have been obtained, a linear fit can be performed between these two points to straightforwardly approximate the curved segment of the trajectory. The resulting
region after this procedure is shown in the red shaded area in
Figure 4a.
4. Examples with Predefined Design Criteria
Now, we make use of the analytic approximation to the SSOT region to describe some applications in the design of a buck converter. Very often, a power converter is designed with nominal specifications of maximum or minimum working load. A useful question that the geometrical methodology that we proposed here can answer is: given that there is a predefined maximum (or minimum) load, what is the smallest (largest) variation of the load such that the system is still able to reach the operation point in SSOT?
Let us first focus on the case in which a load increase is presented to the system. If the converter is working at minimum nominal load, which we denote as
, what is the
region if the system is allowed to vary its load to the maximum allowed
? Here, both
and
are given, and we are only left with calculating the points
and
as explained in
Section 3. For instance, introducing the values of
and
in Equations (
28) and (
32), leads to the coordinates
and
which is precisely the case that is depicted in
Figure 4a.
Similarly, the second problem refers to the case in which the converter is working with the maximum nominal load, which we will set to
and we want to calculate the minimum allowed change in the load
such that the region bounded by
and
leads to the SSOT region. Here,
is known and
is unknown. However from
Figure 4b, it can be seen that set-up corresponds to the case in which
. For this case we only need to set
in Equation (
28) and solve with respect to
:
For
and
, this results in
, as can depicted in
Figure 4b. Of course, this last calculation depends on the maximum output voltage
. In
Figure 5, we can see the variation of
with respect to
at different
. Note, that for
,
results in
, in other words, the corresponding region
(the inadmissible region of
) is indeed empty. An alternative derivation of the
region of these two sample design criteria using the original formulation of the system without canonical transformations can be found in the
Appendix A.
6. Conclusions and Final Remarks
In this paper we made use of the Pontryagin’s maximum principle to derive the admissible region in the state space of a synchronous buck DC/DC converter, which can be reached in optimal time with a single commutation (SSOT) from any point within the same region. In doing so, we made use of a geometric analysis of the trajectories described by the buck converter in canonical coordinates to better understand the admissible subset of the phase plane fulfilling the SSOT condition. Furthermore, we studied two different design set-ups of the buck converter, and used the results obtained previously in order to illustrate the usage of our calculations. Finally, we showed, by means of numerical simulations, that the proposed time optimal control performs adequately under voltage and load variations, both independently and simultaneous.
The most critical procedure in the design of the optimal control studied here is the ability to calculate on-line the proper commutation time, i.e., the time in which the trajectory hits the optimal switching surface, which strongly depends on parameter variations, as explained throughout the text. This problem has been previously identified and several solutions proposed in the form of look-up tables [
11], near-time optimal solutions [
25] and raster surfaces [
26]. These methodologies can be used as a complement to the theoretical derivations presented here.
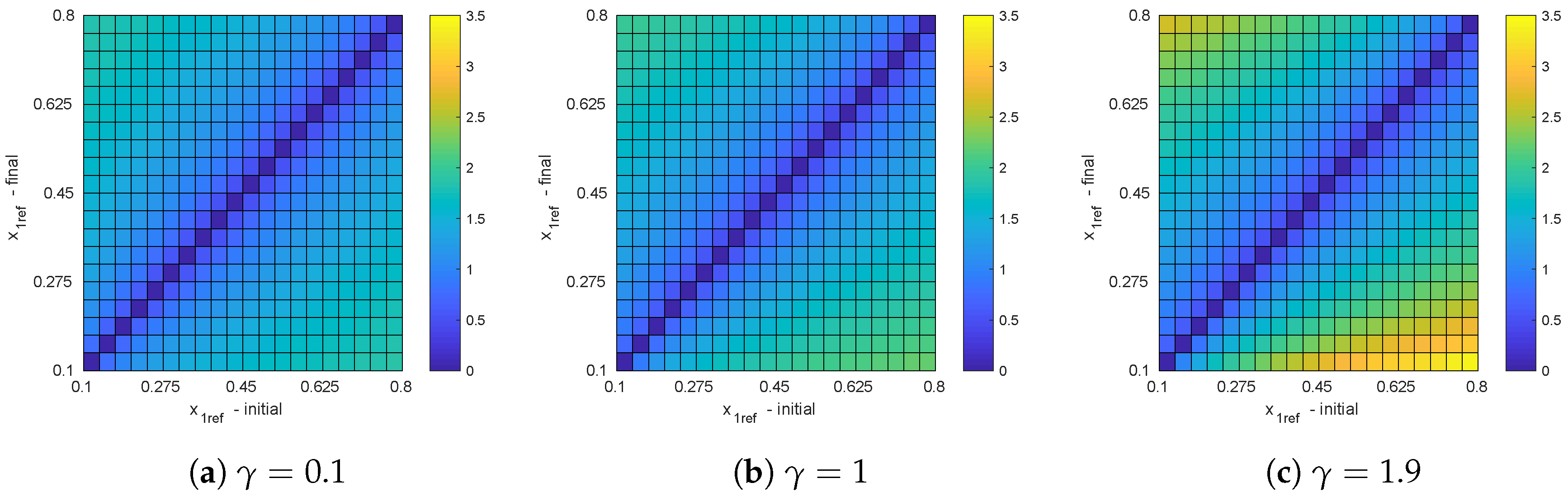
The difficulty of calculating the switching times online is nonetheless compensated with a significant reduction in the settling times of the system. In the simulations shown here, we have shown settling times
t∼3 time units (less than 1 ms in real time units). As a comparison, the same buck converter model with similar parameter values has been recently used to design a globally stable controller [
10]. The settling times reported there are 10 times larger than those shown here. It shall be noticed that
contains the information of the system’s parameters in a single value. This amounts to say that different combinations of
L and
C can be chosen in such a way to modify the time scale of the system’s response and the ranges of
R in which the buck converter can operate under the damped conditions studied here.
It is also worth noticing that the optimal control presented here is useful during the transient behavior following a perturbation from the usual operation point. After the trajectory has reached the neighborhood of this point, we are constrained to use high frequency regulation in order to maintain the trajectory within the neighborhood. Indeed, we saw that the system’s performance in steady state strongly depends on the commutation frequency of the MOSFET. Limitations of the commutation frequency produces undesired oscillations around the operation point and effectively increases the settling times. Additional controllers, such as P or PIs in the high frequency steady operation, can be used in order to better handle undesired oscillations and/or reject disturbances. Additionally, further optimization can be performed during this high frequency regime, which we expect to explore in the future.
Throughout this manuscript, we have chosen to study the buck converter as a proof-of-concept to extend the ideas of estimating the SSOT regions in other physical problems of interest. We predict that such an estimation can be also performed in other piece-wise linear converters, such as boost, buck-boost, and boost-flyback converters by making use of a similar geometrical approach shown here. However, it shall be noticed that most power converters (boost, buck-boost, and flyback) are different from the buck converter from a mathematical perspective. For instance in the buck converter the action of the switching action amounts to shift the equilibrium without changing its properties. Meanwhile, the commuting action in the other converters produce changes in the topology of the system (different eigenvalues), a property that may require additional calculations.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








