
A Comprehensive Investigation on Development of Lightweight Aluminium Miniature Gears by Thermoelectric Erosion Machining Process




Abstract
:1. Introduction
- To manufacture lightweight miniature size gears of aluminium by WTEM process.
- To explore the potential of WTEM to generate good microgeometry and surface quality in gears.
- To study variation in surface roughness with parameters of WTEM in order to understand the mechanism of WTEM gear manufacturing.
- To improve the productivity of WTEM process for manufacturing of bored miniature gear with the hub.
- To do modelling of WTEM parameters for future prediction of gear surface quality and microgeometry.
- To examine and evaluate the microgeometry and surface quality of lightweight aluminium miniature gears.
2. Experimentation
2.1. Material and Specifications
2.2. Procedure of Experiments
2.3. Procedure for Manufacturing of Miniature Spur Gear of Aluminium
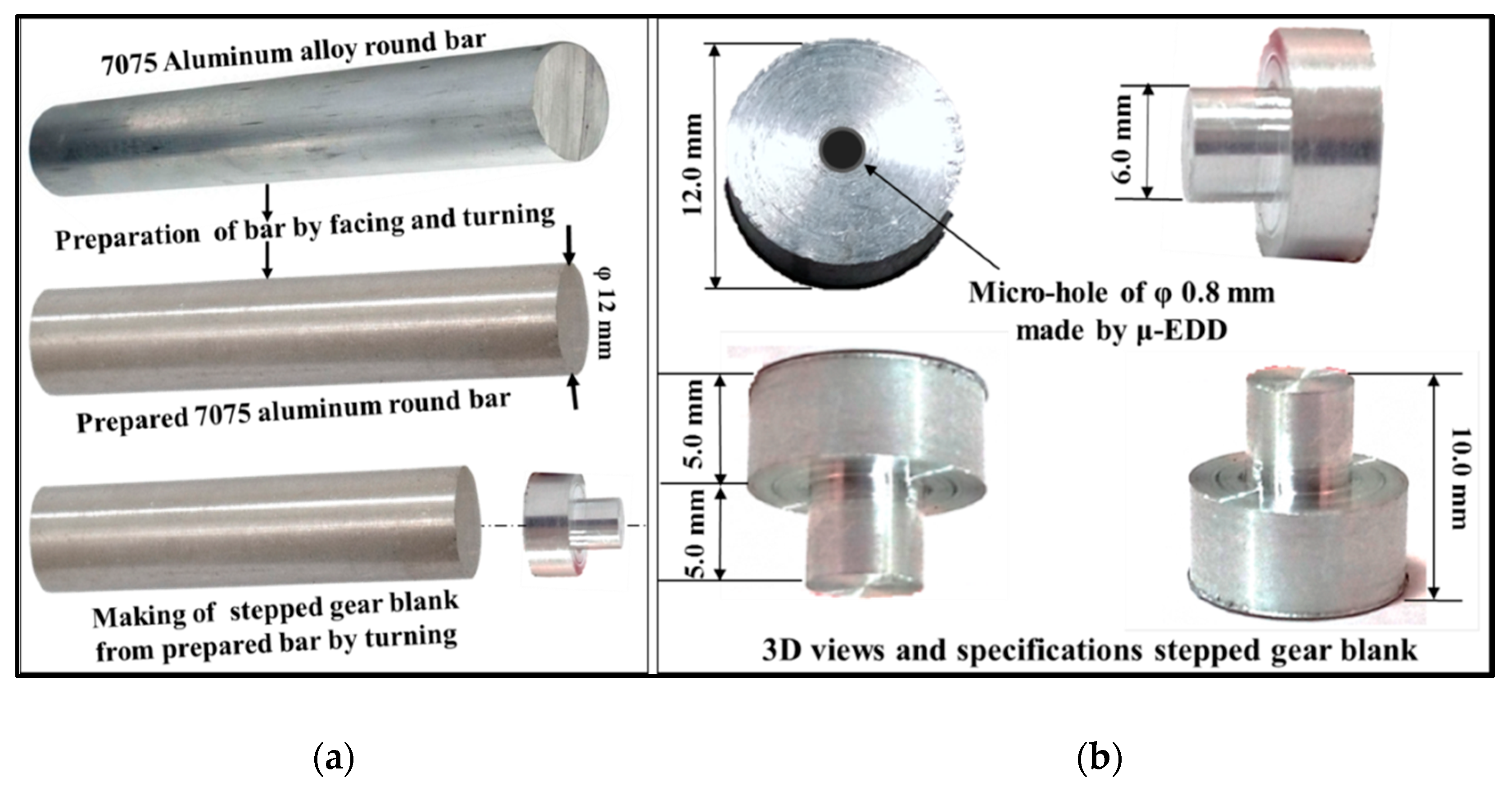
2.3.1. Preparation Phase
- Preparation of the 7075 aluminium alloy bar on CNC lathe.
- Manufacturing of precise stepped gear blanks on CNC lathe to ensure perfect clamping and positioning of gear blank in the V block with respect to the wire on CNC WTEM machine as illustrated in Figure 3.

- Micro-hole (800 μm diameter) drilling at the centre of the prepared stepped gear blank. The micro-hole acts as an entry path to the brass wire of 250 μm diameter for manufacturing of bore of miniature gear.
2.3.2. Programming Phase
- The next step is preparing a layout of the miniature size gear with the bore in the ELCAM software as depicted in Figure 4. Then using this geometric information to make a combined part program for bore diameter and gear as per their specification by window-based part programming ELCAM software incorporated with a workstation of CNC WTEM machine.
- Transferring the part program to the WTEM machine through data exchange cable, floppy disc or pen-drive.
2.3.3. Machining Phase
- The first step of the machining phase is clamping of the V block in a perfectly horizontal position on the worktable of the CNC WTEM machine with the help of a dial gauge.
- Ensure firm and appropriate positioning of the prepared stepped gear blank with respect to the brass wire in the V block with the help of clamp as shown in Figure 3. Even minute variation in perfect positioning of V block on the worktable and the prepared gear blank in V block may cause inaccurate positioning of gear blank with respect to the brass wire that leads to inaccurate or taper bore cutting and thus significantly deteriorate the quality of gear tooth profiles.
- After enlarging the micro-hole, the next step is breaking the brass wire and moving the wire to position it at the entry point of gear which lies between gear blank and V block by running the WTEM machine in dry mode condition as shown in Figure 2c and Figure 4. In dry mode condition, no sparking and flushing take place during machining.
2.3.4. Measurement Phase
- The next step after gear cutting is measurements of volumetric gear cutting speed and surface roughness (Figure 2) of WTEM manufactured miniature spur gear with bore and hub.
- The next step is microgeometry measurements and microstructure examination of the best finish gear made by WTEM. This section may be divided into subheadings. It should provide a concise and precise description of the experimental results, their interpretation, as well as the experimental conclusions that can be drawn.
2.4. Measurement
3. Results and Discussion
4. Validation Experiment for Surface Finish
4.1. Metrological Inspection of the Miniature Gear Having Best Surface Finish
4.2. Microscopic Examination of the Best Finish Miniature Gear
5. Conclusions
- Explored the potential of the WTEM process by successfully manufacturing lightweight (<0.8 g) aluminium miniature spur gears with bore and hub.
- Identified servo-voltage and pulse-on time as the most significant parameters which affect the surface finish of miniature size spur gear and productivity of the WTEM process.
- Achieved surface finish with an average and total height of roughness profile values up to 1.58 μm and 9.37 µm respectively.
- Achieved volumetric gear cutting speed up to 12.83 mm3/min.
- Best finish gear revealed gear quality up to DIN 7 standard number.
- Microscopic investigation revealed accurate and uniform tooth profiles free from burr and sharp edge definition. Moreover, tooth flank surfaces were found free from cracks and contamination.
Author Contributions
Funding
Conflicts of Interest
Appendix A



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Exp. Runs | Variable WTEM Parameters | Weight (g) | Mat. Lost (WL) | M/C Time ‘t’ (min.) | Responses | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SV (Volts) | Ton (μs) | WS (m/min) | WT (g) | Gear Blank (W = WB + WA) | Gear (Wg) | Bore Bar (Wb) | WA + Wg + Wb | VGCS (mm3/min) | Surface Roughness (μm) | |||||
| Before | After | Avg. Values Ra (R1 + R2) | Avg. Values Rt (R1 + R2) | |||||||||||
| 1 | 10 | 0.9 | 3 | 1140 | 1.84 | 0.69 | 0.74 | 0.11 | 1.54 | 0.31 | 17:30 | 6.30 | 1.65 | 9.48 |
| 2 | 10 | 1.1 | 5 | 1380 | 1.98 | 0.72 | 0.77 | 0.11 | 1.60 | 0.38 | 14:36 | 9.26 | 1.68 | 9.8 |
| 3 | 10 | 1.3 | 7 | 1620 | 1.87 | 0.68 | 0.76 | 0.12 | 1.56 | 0.31 | 09:21 | 12.21 | 1.70 | 10.2 |
| 4 | 15 | 0.9 | 5 | 1620 | 1.92 | 0.73 | 0.75 | 0.1 | 1.58 | 0.34 | 16:40 | 7.26 | 1.58 | 9.37 |
| 5 | 15 | 1.1 | 7 | 1140 | 1.95 | 0.73 | 0.76 | 0.11 | 1.60 | 0.35 | 12:42 | 9.81 | 1.71 | 11.2 |
| 6 | 15 | 1.3 | 3 | 1380 | 1.92 | 0.69 | 0.79 | 0.11 | 1.59 | 0.33 | 10:15 | 11.47 | 1.81 | 12 |
| 7 | 20 | 0.9 | 7 | 1380 | 1.92 | 0.7 | 0.76 | 0.1 | 1.56 | 0.36 | 15:30 | 8.28 | 1.62 | 10.12 |
| 8 | 20 | 1.1 | 3 | 1620 | 1.91 | 0.73 | 0.72 | 0.1 | 1.55 | 0.36 | 13:17 | 9.65 | 1.79 | 11.4 |
| 9 | 20 | 1.3 | 5 | 1140 | 1.96 | 0.74 | 0.76 | 0.11 | 1.61 | 0.35 | 11:30 | 12.83 | 1.83 | 12.4 |
| Regression Analysis: VGCS Versus SV, Ton, WS, and WT | |||||
| Predictor | Coefficient | SE Coefficient | TTest | pValue | |
| Constant | −6.6406 | 0.8449 | −7.86 | 0.001 | |
| Servo-voltage ‘SV’ | 0.09967 | 0.01898 | 5.25 | 0.006 | |
| Pulse-on time ‘Ton’ | 12.2250 | 0.4746 | 25.76 | 0.001 | |
| Wire speed ‘WS’ | 0.24000 | 0.04746 | 5.06 | 0.007 | |
| Wire tension ‘WT’ | 0.0001250 | 0.0003955 | 0.32 | 0.768 | |
| Standard Error (S) = 0.232516 R-Square = 99.4% Adjusted R-Square = 98.9% | |||||
| Analysis of Variance (ANOVA) | |||||
| Source | Degree of Freedom | Sum of Square | Mean Square | F Test | pValue |
| Regression | 4 | 38.7460 | 9.6865 | 179.17 | 0.000 |
| Residual Error | 4 | 0.2163 | 0.0541 | ||
| Total | 8 | 38.9622 | |||
| Regression Analysis: Ra Versus SV, Ton, WS, and WT | |||||
| Constant | 1.36028 | 0.09125 | 14.91 | 0.001 | |
| Servo-voltage ‘SV’ | 0.007000 | 0.002050 | 3.41 | 0.027 | |
| Pulse-on time ‘Ton’ | 0.40833 | 0.05126 | 7.97 | 0.001 | |
| Wire speed ‘WS’ | −0.018333 | 0.005126 | −3.58 | 0.023 | |
| Wire tension ‘WT’ | −0.00008333 | 0.00004271 | −1.95 | 0.123 | |
| Standard Error (S) = 0.0251109 R-Square = 95.8% Adjusted R-Square = 91.6% | |||||
| Analysis of Variance (ANOVA) | |||||
| Source | Degree of Freedom | Sum of Square | Mean Square | F Test | pValue |
| Regression | 4 | 0.057833 | 0.014458 | 22.93 | 0.005 |
| Residual Error | 4 | 0.002522 | 0.000631 | ||
| Total | 8 | 0.060356 | |||
| Regression Analysis: Rt Versus SV, Ton, WS, and WT | |||||
| Constant | 5.871 | 1.604 | 5.52 | 0.005 | |
| Servo-voltage ‘SV’ | 0.14800 | 0.02391 | 6.19 | 0.003 | |
| Pulse-on time ‘Ton’ | 4.6917 | 0.5977 | 7.85 | 0.001 | |
| Wire speed ‘WS’ | −0.11333 | 0.05977 | −1.90 | 0.131 | |
| Wire tension ‘WT’ | −0.0014653 | 0.0004980 | −2.94 | 0.042 | |
| Standard Error (S) = 0.292788 R-Square = 96.6% Adjusted R-Square = 93.1% | |||||
| Analysis of Variance | |||||
| Source | Degree of Freedom | Sum of Square | Mean Square | F Test | pValue |
| Regression | 4 | 9.6187 | 2.4047 | 28.05 | 0.003 |
| Residual Error | 4 | 0.3429 | 0.0857 | ||
| Total | 8 | 9.9616 | |||
References
- Li, J.; Liu, H.; Shen, Z.; Qian, Q.; Zhang, H.; Wang, X. Formability of micro-gears fabrication in laser dynamic flexible punching. J. Mater. Process. Technol. 2016, 234, 131–142. [Google Scholar] [CrossRef]
- Donga, X.; Chenb, F.I.; Chen, S.; Liu, Y.; Huang, Z.; Chen, H.; Feng, S.; Zhao, L.; Wu, Z.; Zhang, X. Microstructure and microhardness of hot extruded 7075 Aluminium alloy micro-gear. J. Mater. Process. Technol. 2014, 219, 199–208. [Google Scholar] [CrossRef]
- Phokane, T.; Gupta, K.; Gupta, M. Investigations on surface roughness and tribology of miniature brass gears manufactured by abrasive water jet machining. Proc. IMechE Part B J. Eng. Manuf. 2017, 232, 1–10. [Google Scholar] [CrossRef]
- Radzevich, S.P. Dudley’s Handbook of Practical Gear Design and Manufacture, 2nd ed.; CRC Press: New York, NY, USA, 2012; ISBN 9781439866016. [Google Scholar]
- Pathak, S.; Jain, N.K.; Palani, I.A. On Use of Pulsed Electrochemical Honing to Improve Micro-geometry of Bevel Gears. Mater. Manuf. Process. 2014, 29, 1461–1469. [Google Scholar] [CrossRef]
- Imran, M.; Khan, A.R.A. Characterization of Al-7075 metal matrix composites: A review. J. Mater. Res. Technol. 2019, 8, 3347–3356. [Google Scholar] [CrossRef]
- Ali, M.Y.; Mohammad, A.S. Experimental study of conventional WEDM for micro-fabrication. Mater. Manuf. Process. 2008, 23, 641–645. [Google Scholar] [CrossRef]
- Bralla, J.G. Design for Manufacturability Handbook, 2nd ed.; Tata McGraw-Hill: New York, NY, USA, 1998; ISBN 9780070071391. [Google Scholar]
- Benedict, G.F. Nontraditional Manufacturing Processes; Marcel Dekker Inc.: New York, NY, USA, 1987; ISBN 0-8247-7352-7. [Google Scholar]
- Chaubey, S.K.; Jain, N.K. Capabilities evaluation of WSEM, milling and hobbing for meso-gear manufacturing. Mater. Manuf. Process. 2018, 33, 1539–1548. [Google Scholar] [CrossRef]
- Wanga, Y.; Chena, J.; Wang, Z.; Dong, S. Fabrication of micro gear with intact tooth profile by micro wire electrical discharge machining. J. Mater. Process. Technol. 2018, 252, 137–147. [Google Scholar] [CrossRef]
- Ali, M.Y.; Karim, A.N.M.; Adesta, E.Y.T.; Ismail, A.F.; Abdullah, A.A.; Idris, M.N. Comparative study of conventional and micro-WEDM based on machining of meso/microsized spur gear. Int. J. Precision. Eng. Manuf. 2010, 11, 779–784. [Google Scholar] [CrossRef]
- Gupta, K.; Jain, N.K. Comparative study of wire-EDM and hobbing for manufacturing high quality miniature gears. Mater. Manuf. Process. 2014, 29, 1470–1476. [Google Scholar] [CrossRef]
- Chaubey, S.K.; Jain, N.K. Investigation on surface quality of WEDM-manufactured meso bevel and helical gears. Mater. Manuf. Process. 2018, 33, 1568–1577. [Google Scholar] [CrossRef]
- Petare, A.C.; Mishra, A.; Palani, I.A.; Jain, N.K. Study of laser texturing assisted abrasive flow finishing for enhancing surface quality and microgeometry of spur gears. Int. J. Adv. Manuf. Technol. 2019, 101, 785–799. [Google Scholar] [CrossRef]
- Gupta, K.; Jain, N.K. Analysis and Optimization of Surface Finish of Wire Electrical Discharge Machined Miniature Gears. Proc. IMechE Part B J. Eng. Manuf. 2014, 228, 673–681. [Google Scholar] [CrossRef]
- Chaubey, S.K.; Jain, N.K. Analysis and multi-response optimization of gear quality and surface finish of meso-sized helical and bevel gears manufactured by WSEM process. Precis. Eng. 2019, 55, 293–309. [Google Scholar] [CrossRef]










| Variable Parameters | Constant Parameters | |||
|---|---|---|---|---|
| WTEM Parameters (Units) | Levels | |||
| A | B | C | ||
| Pulse-on time ‘Ton’ (µs) | 0.9 | 1.1 | 1.3 | Peak current (IP): 12 A; Cutting speed (CS): 100 %; Pulse-off time ‚Toff: 44.5 μs; Wire material: soft plain brass (Tensile strength: 470–510 N/mm2); Wire diameter: 0.25 mm; Dielectric: deionized water; and Dielectric pressure (WP): 7 kg/cm2 |
| Servo-voltage ‘Sv’ (Volts) | 10 | 15 | 20 | |
| Wire speed ‘WS’ (m/min) | 3 | 5 | 7 | |
| Wire tension ‘WT’ (g) | 1140 | 1380 | 1620 | |
| Composition of gear material (% weight): 0.4% Si; 2.1% Mg; 0.15% Mn; 1.2% Cu; 0.18% Cr; 0.2% Si; 5.3% Zn; 0.1% Ti, and balance Aluminium | ||||
| Detailed gear specifications: Outside diameter: 9.8 mm; Bore diameter: 3.0 mm; Hub diameter: 6.0 mm; Pitch circle diameter: 8.4 mm; module: 0.7 mm; Root diameter: 6.65 mm; Face width: 5.0 mm; Hub length: 5.0 mm; Number of tooth: 12; Gear material: Aluminium alloy (7075) | ||||
| Specification of WTEM Machine Resolution: 0.0005 mm; Table size: 440 × 650 mm; Taper angle: ±300 Max. workpiece height : 200 mm; Max. workpiece weight: 300 kg Max. jog speed: 900 mm/min; Max. wire spool capacity/dia: 6 kg/ 0.25 mm standard, 0.15, and 0.2 optional | ||||
| Values of Variable WTEM Parameters | Surface Roughness Parameters (μm) | Difference (% Error) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Ra | Rt | Avg. | |||||||||
| SV (Volts) | Ton (µs) | WS (m/min) | WT (g) | R1 | R2 | Avg. | R1 | R2 | Ra | Rt | |
| 15 | 0.9 | 5 | 1620 | - | - | - | - | - | - | - | - |
| Validation | 1.54 | 1.56 | 1.55 | 9.61 | 8.85 | 9.23 | 0.02 (1.9) | 0.14 (1.5) | |||
| Experimental | 1.58 | 9.37 | |||||||||
| Criteria for Evaluation | Best Quality Meso Helical Gear of Al | |||
|---|---|---|---|---|
| Value | Quality | |||
| Microgeometry Parameters | RHF | LHF | Average | |
| Total profile error ‘Fa’ (µm) | 12.4 | 10.5 | 11.45 | DIN 7 |
| Total lead error ‘Fß’ (µm) | 6.4 | 6.7 | 6.55 | DIN 7 |
| Single pitch error ‘fp’ (µm) | 11.0 | 8.7 | 9.85 | DIN 6 |
| Successive pitch error ‘fu’ (µm) | 13.5 | 16.5 | 15.00 | DIN 8 |
| Total pitch error ‘Fp’ (µm) | 12.1 | 13.7 | 12. 9 | DIN 6 |
| Radial runout ‘Fr’ (µm) | 13.7 | DIN 8 | ||
| Macrogeometry parameters | Deviation | |||
| Tooth thickness deviation (µm) | 3 | |||
| Span deviation (µm) | 6 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaubey, S.K.; Jain, N.K.; Gupta, K. A Comprehensive Investigation on Development of Lightweight Aluminium Miniature Gears by Thermoelectric Erosion Machining Process. Micromachines 2021, 12, 1230. https://doi.org/10.3390/mi12101230
Chaubey SK, Jain NK, Gupta K. A Comprehensive Investigation on Development of Lightweight Aluminium Miniature Gears by Thermoelectric Erosion Machining Process. Micromachines. 2021; 12(10):1230. https://doi.org/10.3390/mi12101230
Chicago/Turabian StyleChaubey, Sujeet Kumar, Neelesh Kumar Jain, and Kapil Gupta. 2021. "A Comprehensive Investigation on Development of Lightweight Aluminium Miniature Gears by Thermoelectric Erosion Machining Process" Micromachines 12, no. 10: 1230. https://doi.org/10.3390/mi12101230
APA StyleChaubey, S. K., Jain, N. K., & Gupta, K. (2021). A Comprehensive Investigation on Development of Lightweight Aluminium Miniature Gears by Thermoelectric Erosion Machining Process. Micromachines, 12(10), 1230. https://doi.org/10.3390/mi12101230