
Piezoelectric Ultrasonic Biological Microdissection Device Based on a Novel Flexure Mechanism for Suppressing Vibration

 ,
,
Abstract
:1. Introduction
2. Structural Design
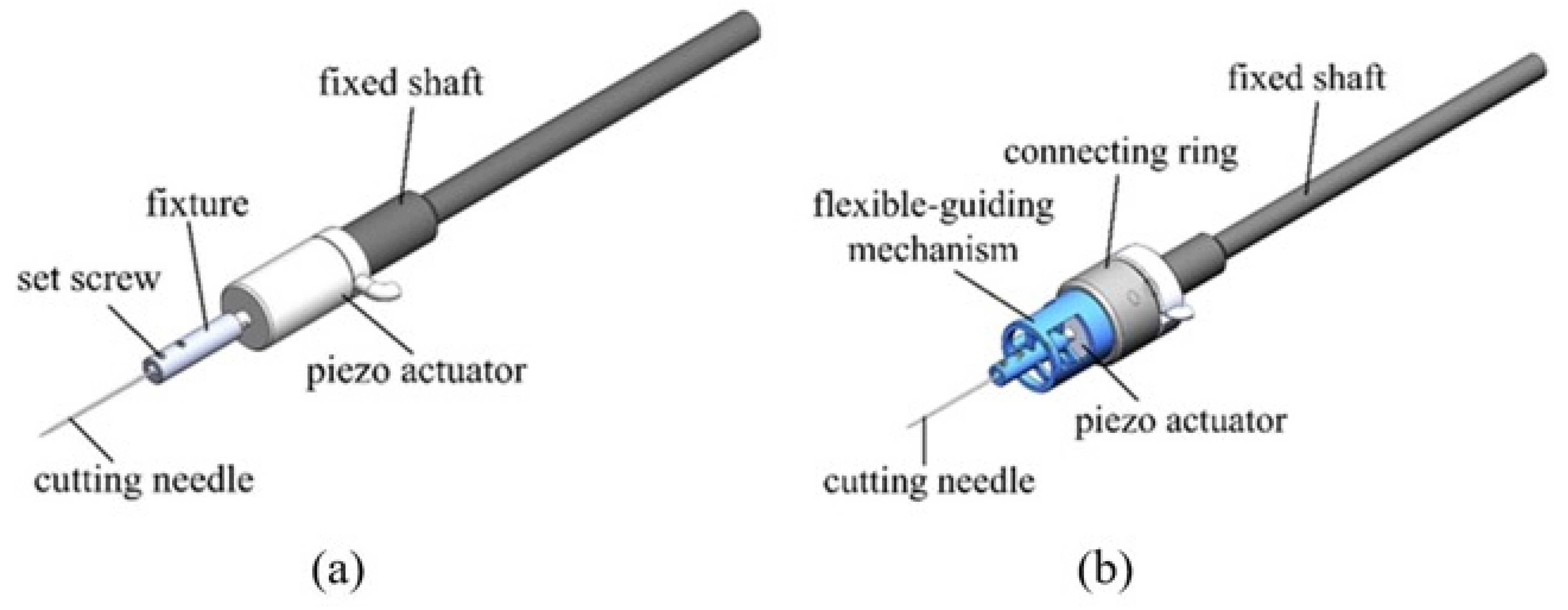
2.1. The Overall Design of the Microdissection Device
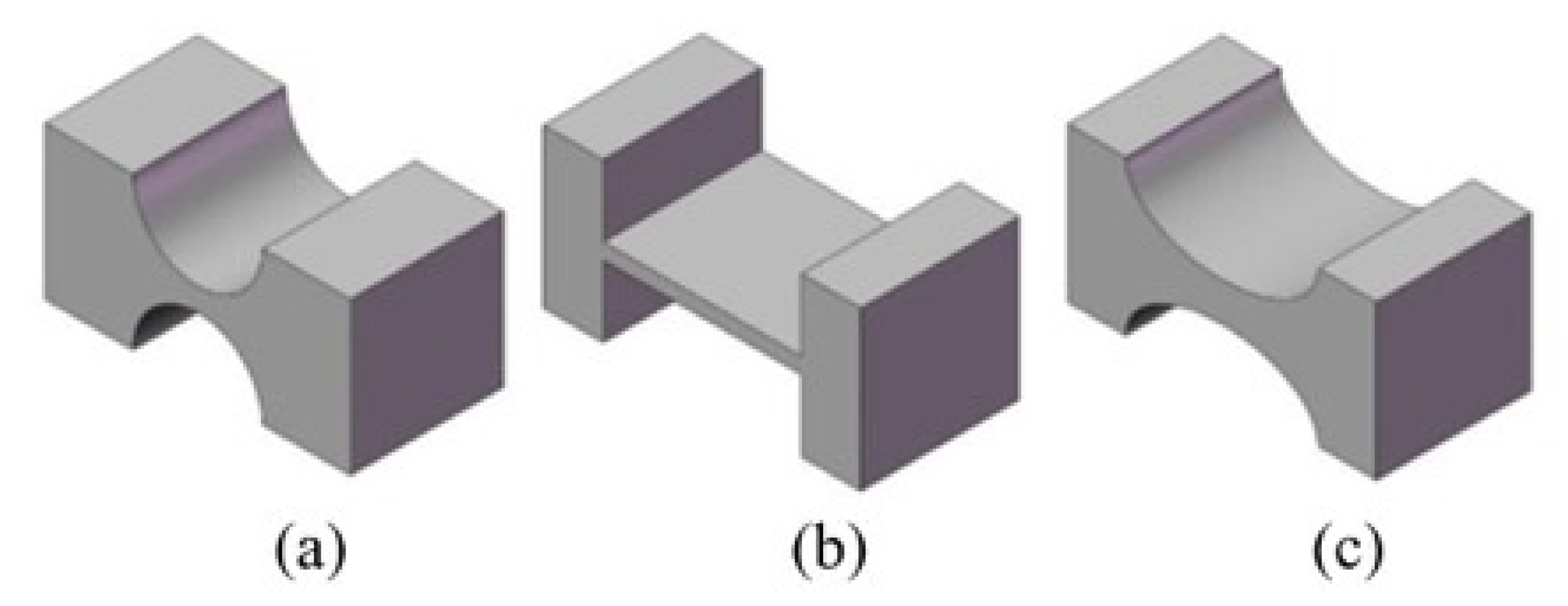
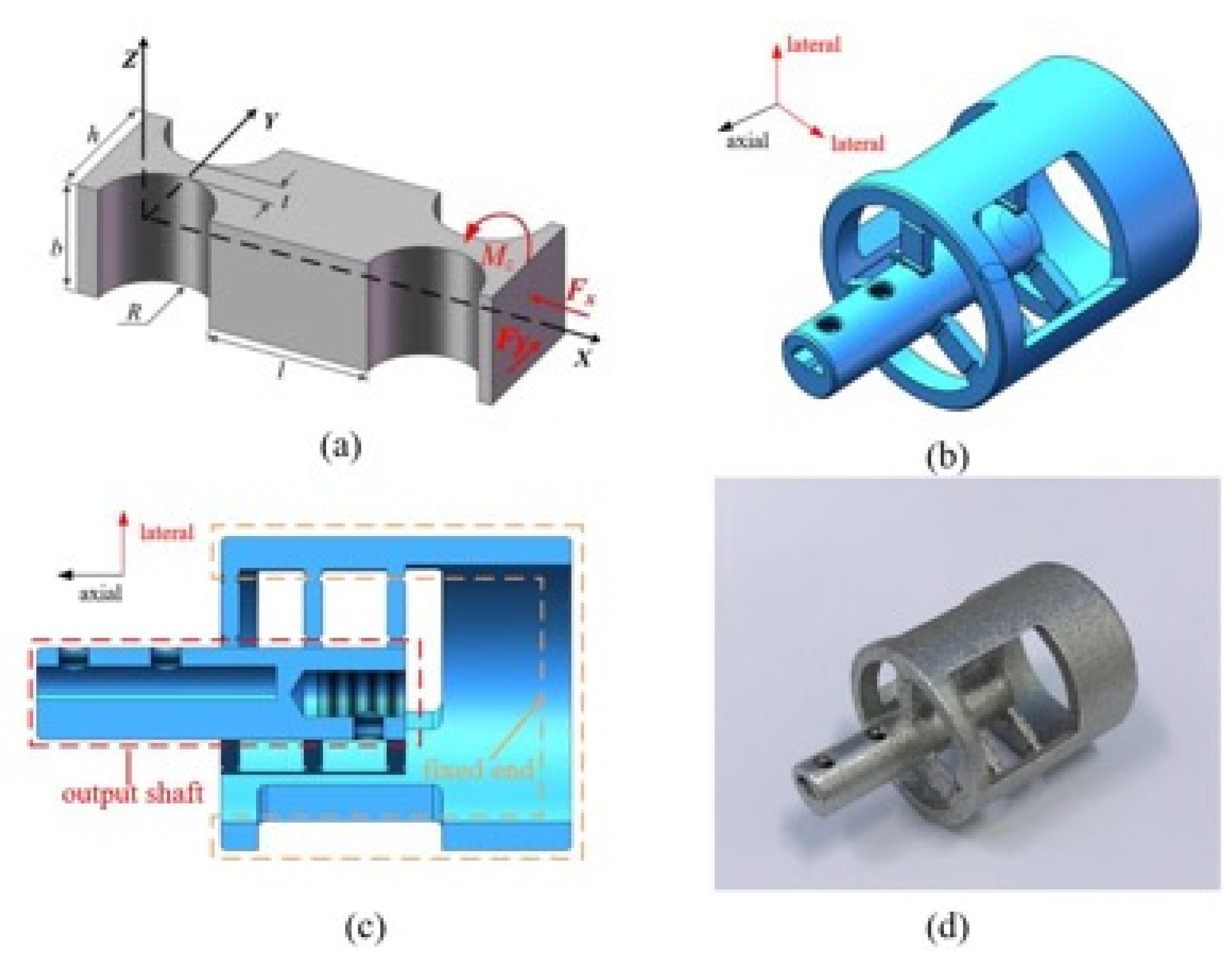
2.2. Design and Analysis of Flexure Hinge
2.3. Overall Design of the Flexure Mechanism
3. Simulation Analysis
3.1. Modal Analysis
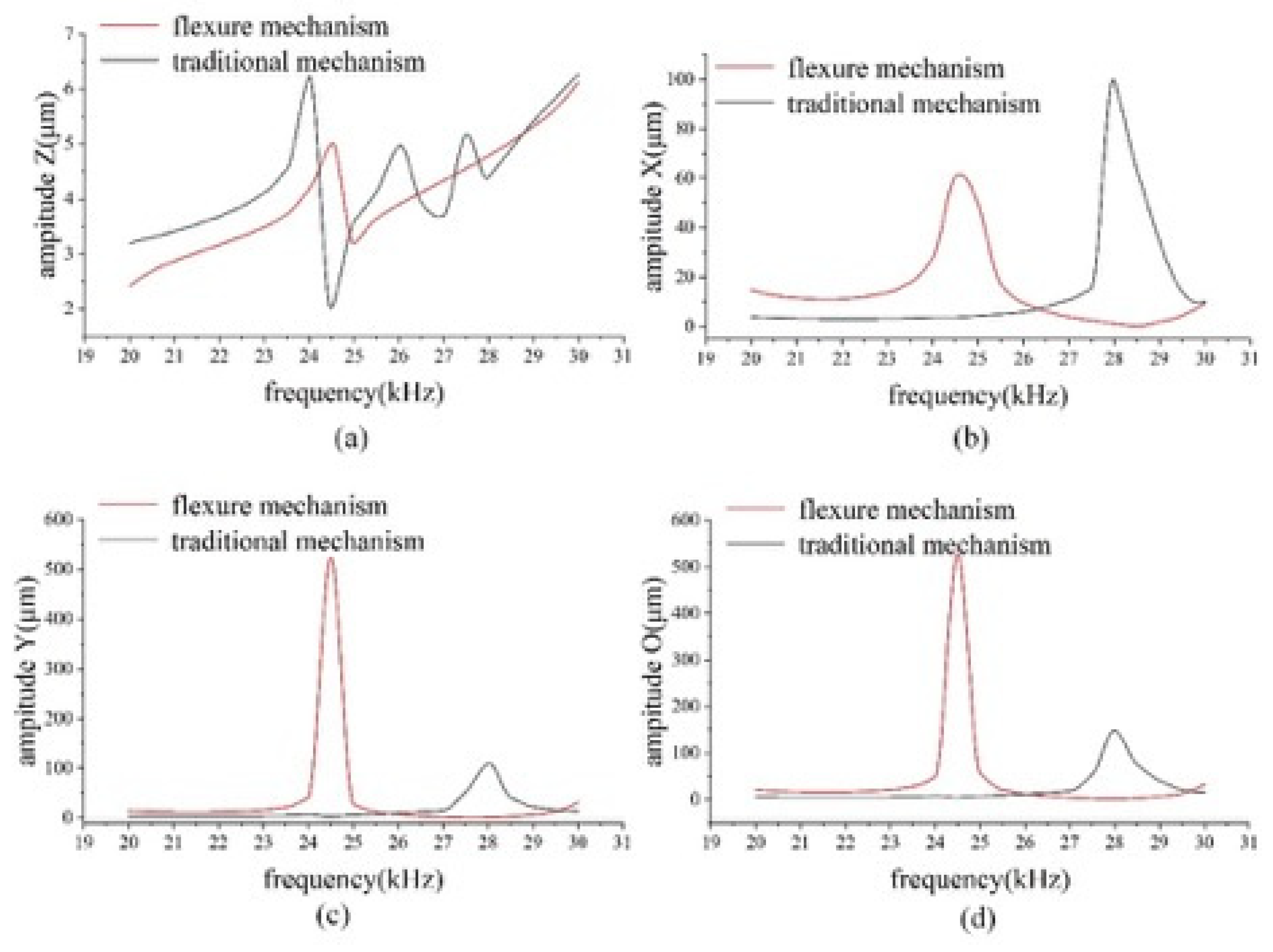
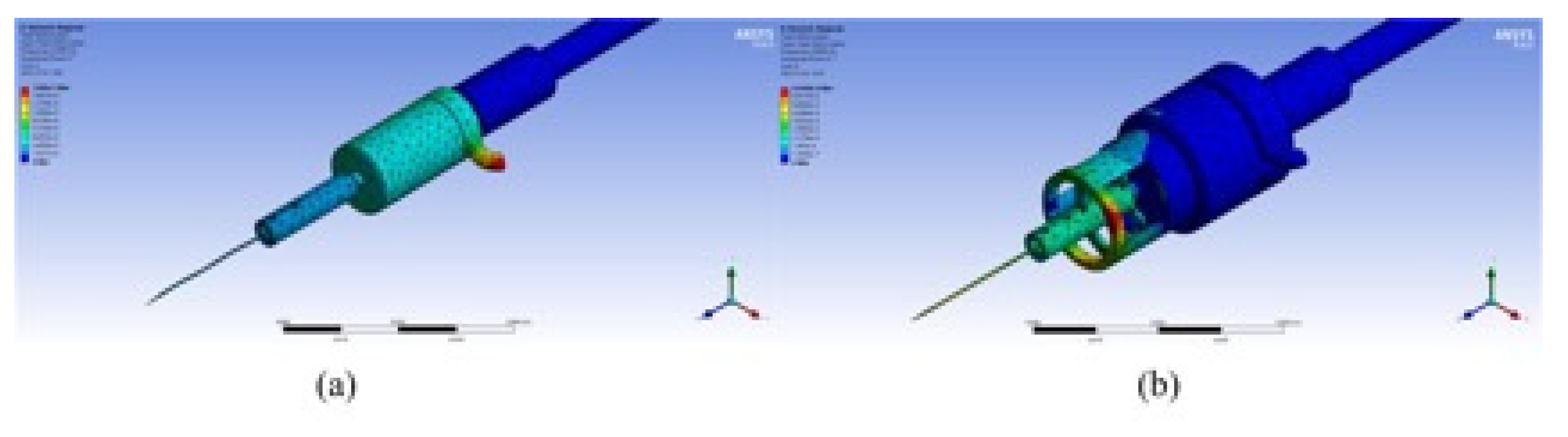
3.2. Harmonic Response Analysis
4. Experiment and Discussion
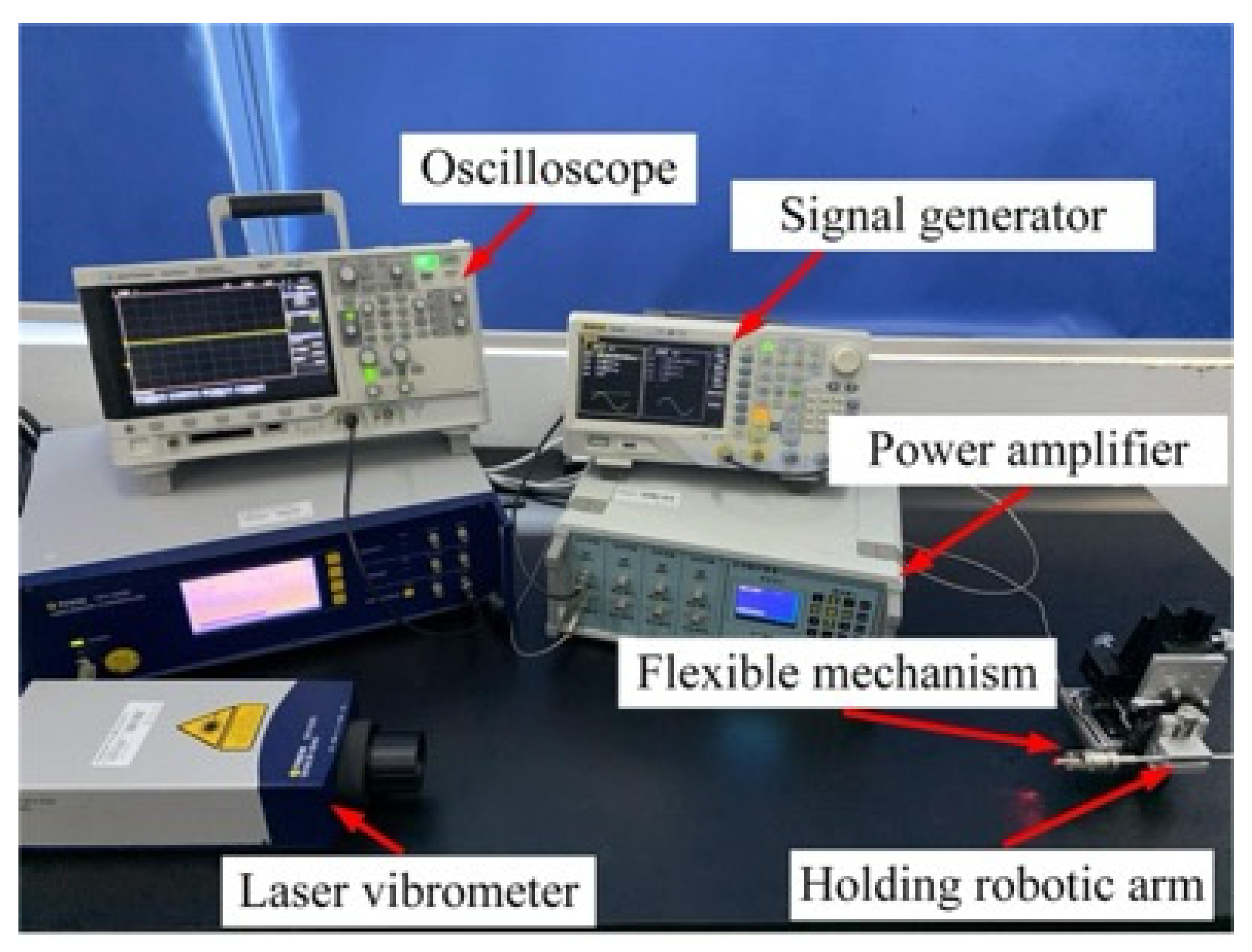
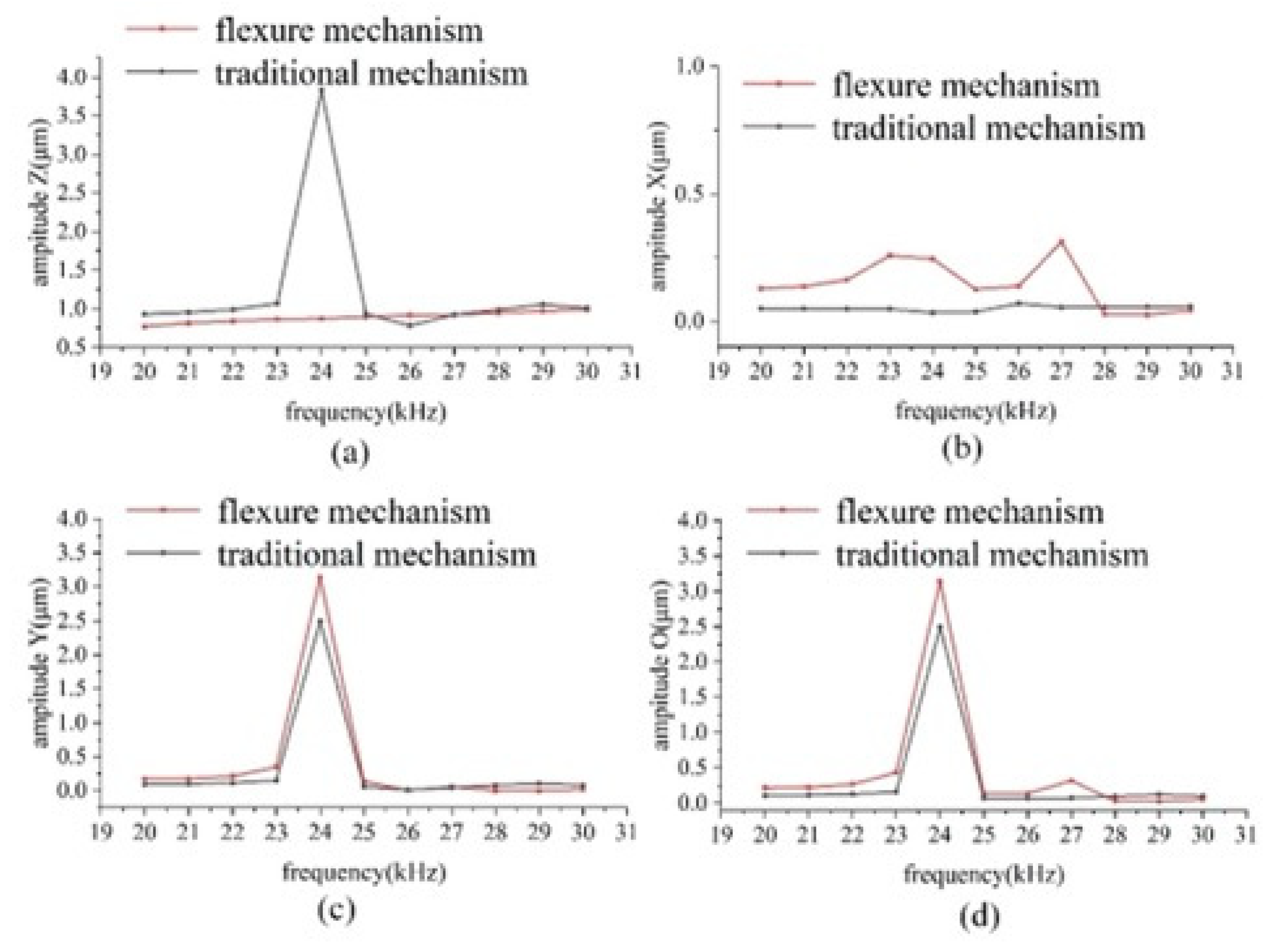
4.1. Flexure Mechanism Vibration Test
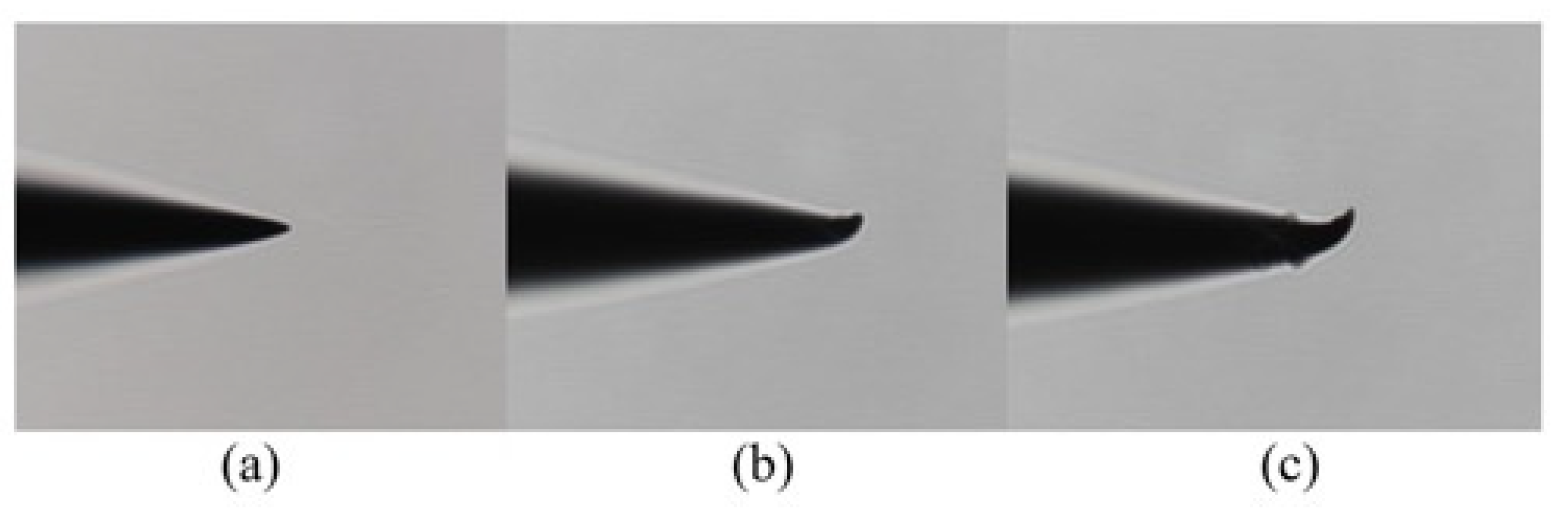
4.2. Dissecting Needle Vibration Test
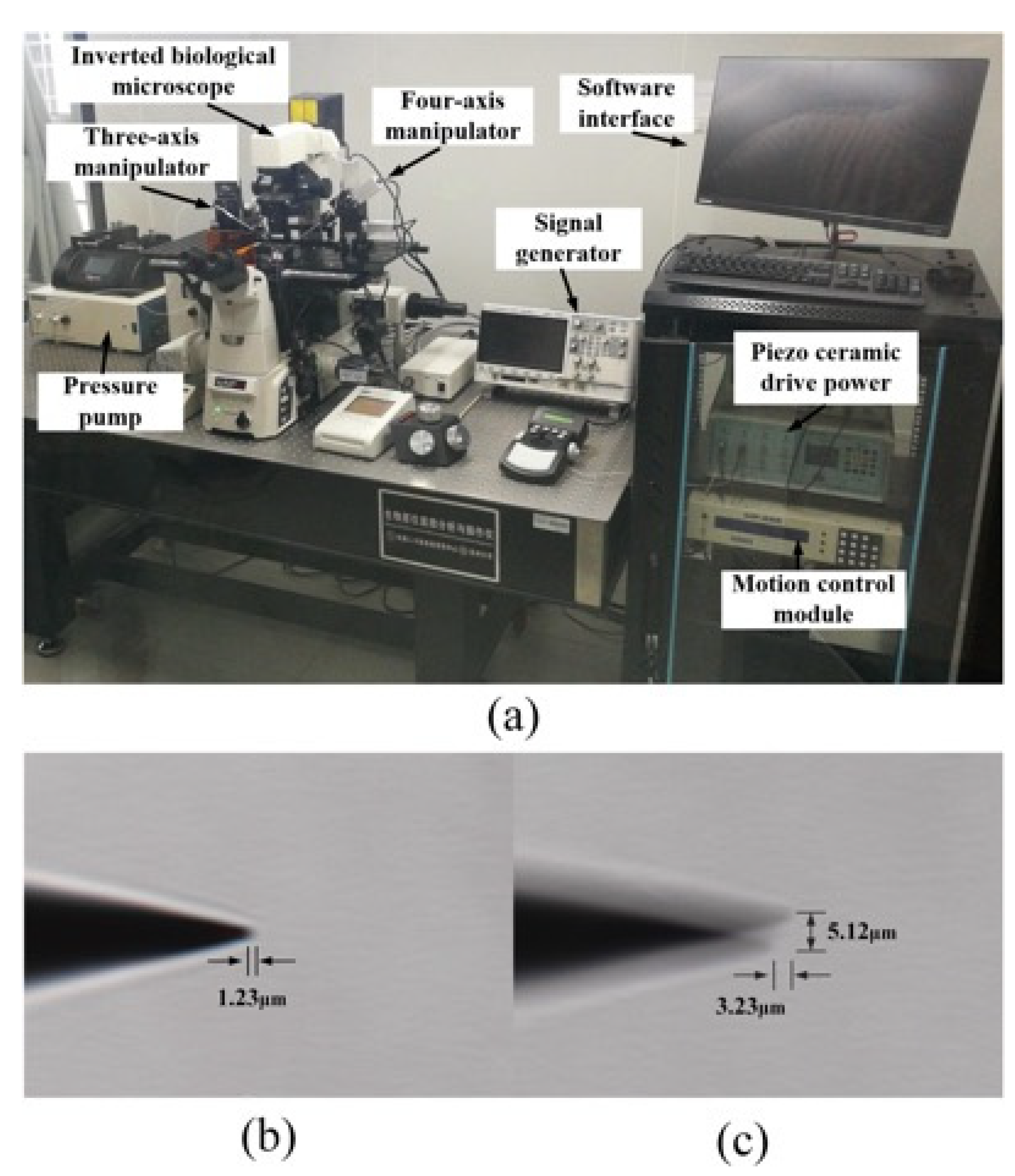
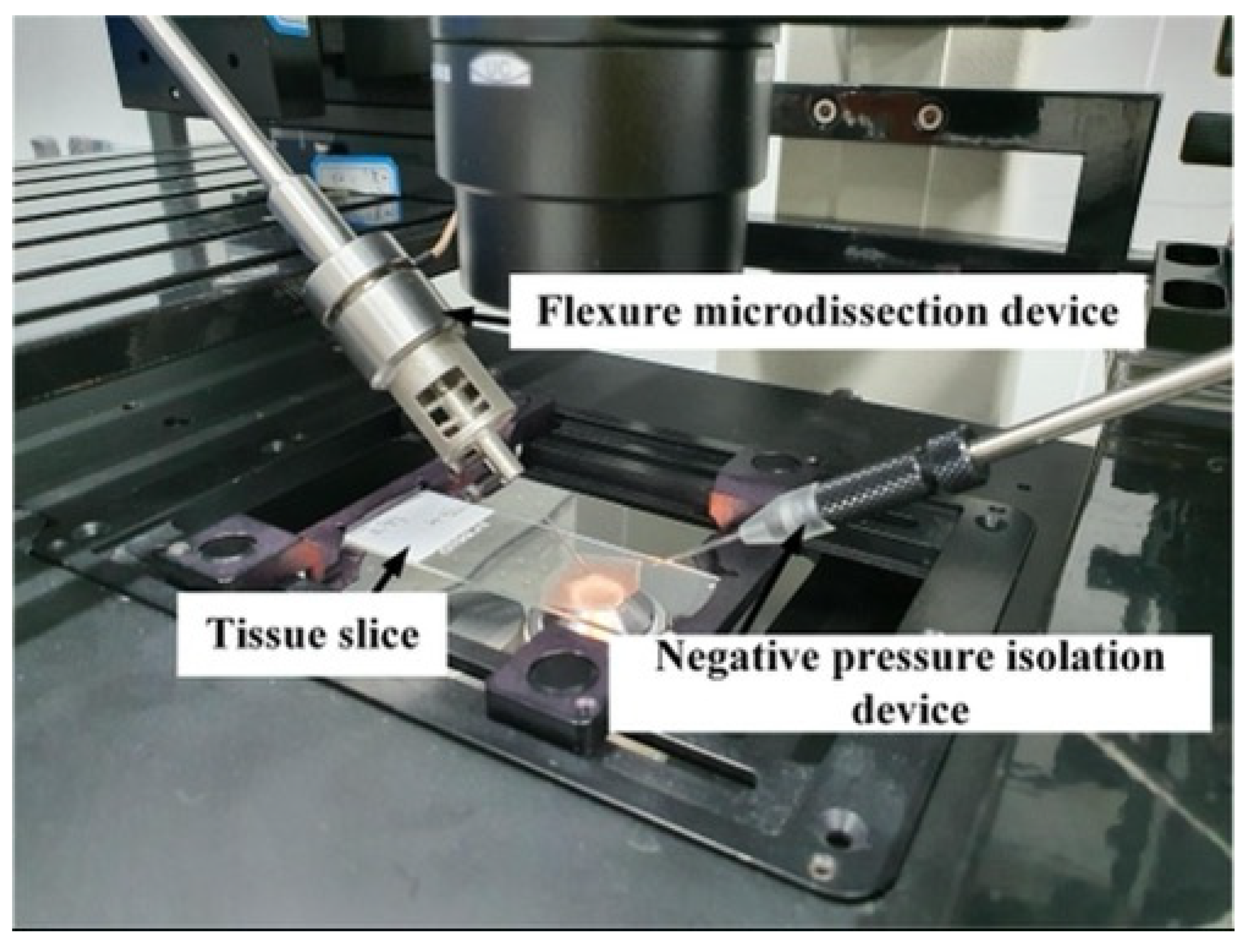
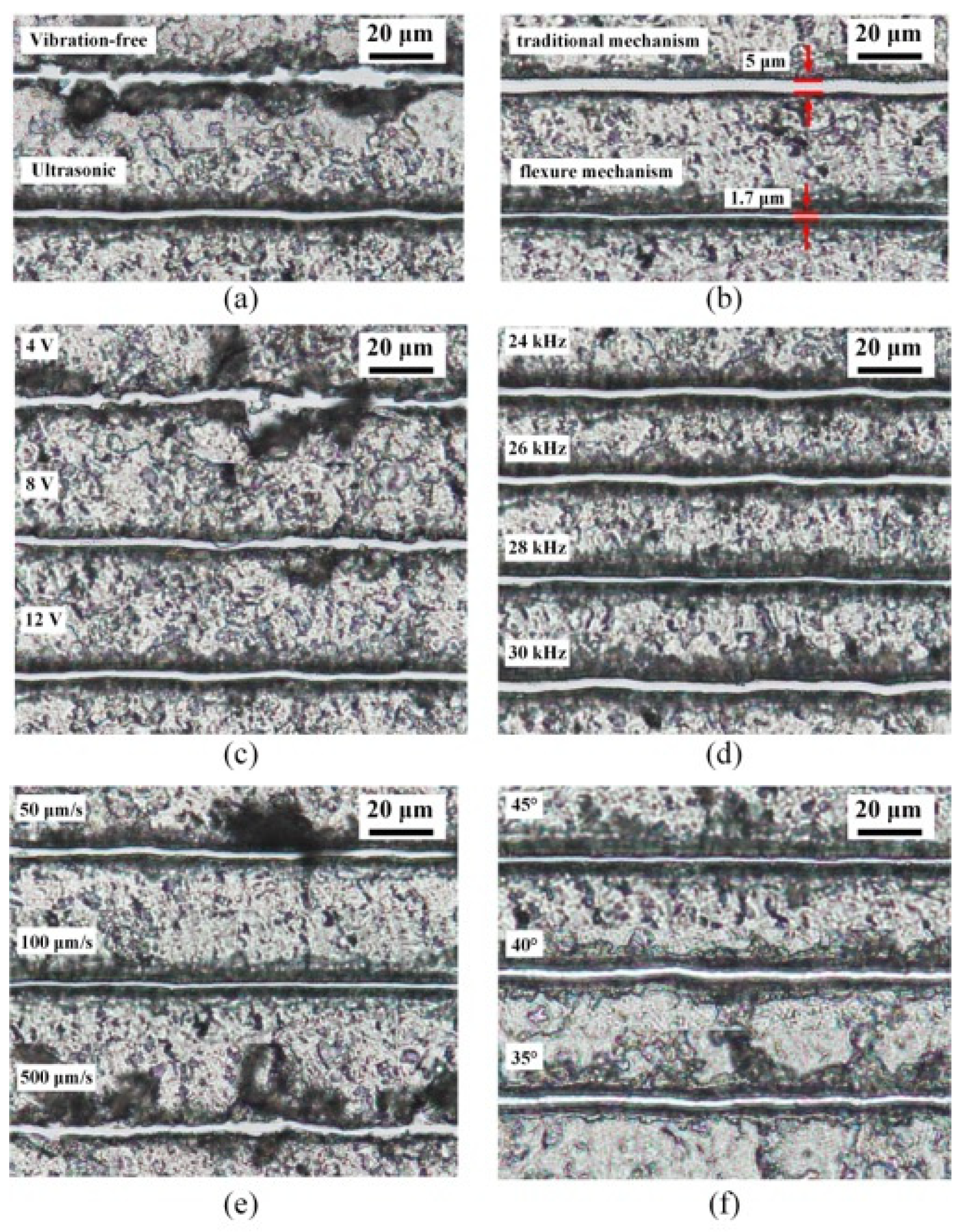
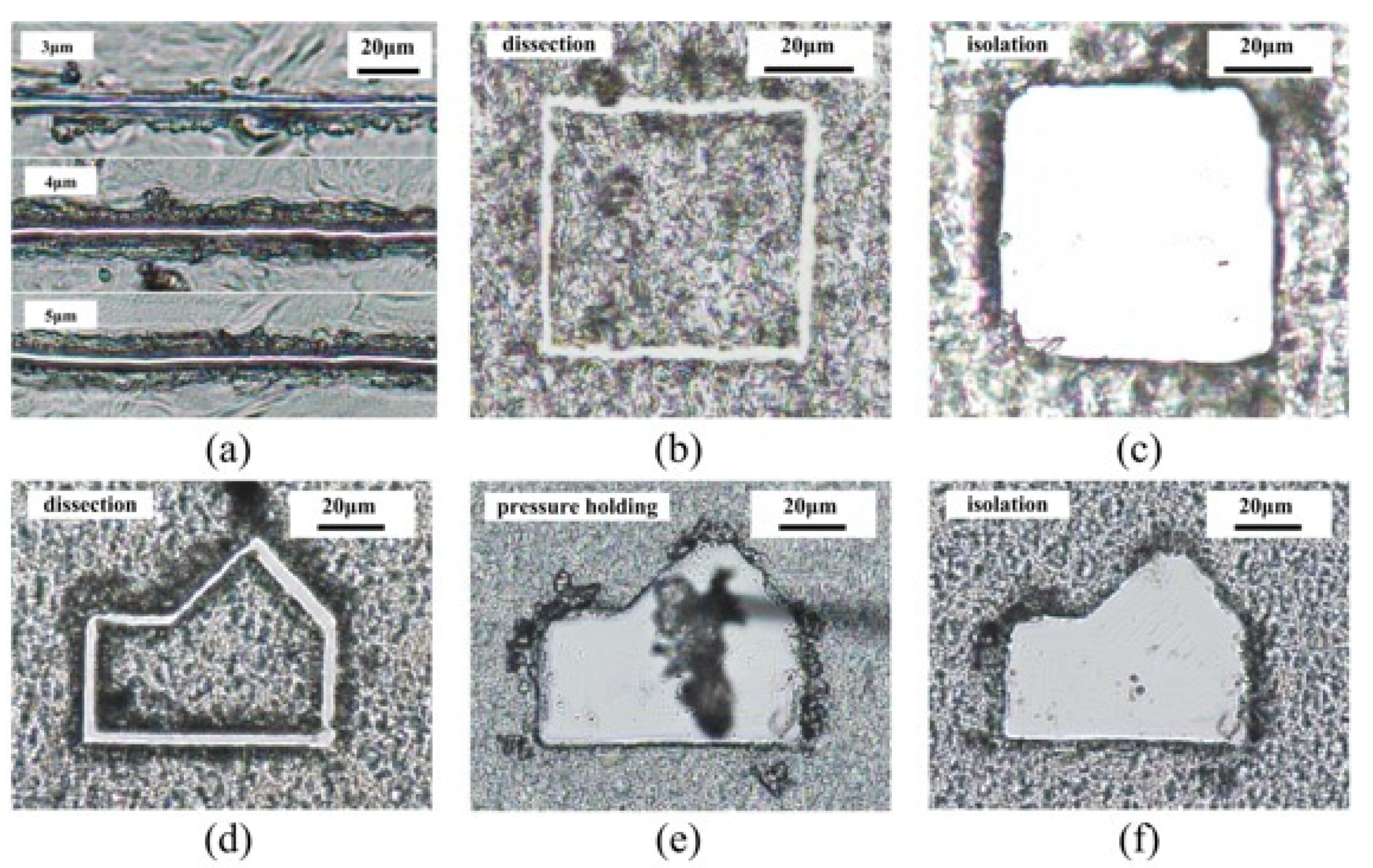
4.3. Paraffin Tissue Slice Dissecting Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yamazaki, M.; Hosokawa, M.; Arikawa, K.; Takahashi, K.; Sakanashi, C.; Yoda, T.; Matsunaga, H.; Takeyama, H. Effective microtissue RNA extraction coupled with Smart-seq2 for reproducible and robust spatial transcriptome analysis. Sci. Rep. 2020, 10, 7083. [Google Scholar] [CrossRef]
- Feng, L.; Hagiwara, M.; Ichikawa, A.; Arai, F. On-Chip Enucleation of Bovine Oocytes using Microrobot-Assisted Flow-Speed Control. Micromachines 2013, 4, 272–285. [Google Scholar] [CrossRef]
- Moffitt, R.A.; Marayati, R.; Flate, E.L.; Volmar, K.E.; Loeza, S.G.; Hoadley, K.A.; Rashid, N.U.; Williams, L.A.; Eaton, S.C.; Chung, A.H.; et al. Virtual microdissection identifies distinct tumor- and stroma-specific subtypes of pancreatic ductal adenocarcinoma. Nat. Genet. 2015, 47, 1168–1178. [Google Scholar] [CrossRef] [PubMed]
- Oh, S.; Lee, H. Efficiency of EGFR mutation analysis for small microdissected cytological specimens using multitech DNA extraction solution: Efficiency of EGFR Mutation Analysis. Cancer Cytopathol. 2015, 123. [Google Scholar] [CrossRef] [PubMed]
- Zlotina, A.; Kulikova, T.; Kosyakova, N.; Liehr, T.; Krasikova, A. Microdissection of lampbrush chromosomes as an approach for generation of locus-specific FISH-probes and samples for high-throughput sequencing. BMC Genom. 2016, 17, 126. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hoffman, D.; Chaffins, M.; Cankovic, M.; Maeda, K.; Meehan, S. Manual microdissection technique in a case of subcutaneous panniculitis-like T-cell lymphoma: A case report and review. J. Cutan. Pathol. 2012, 39, 769–772. [Google Scholar] [CrossRef] [PubMed]
- De Marchi, T.; Braakman, R.B.; Stingl, C.; van Duijn, M.M.; Smid, M.; Foekens, J.A.; Luider, T.M.; Martens, J.W.; Umar, A. The advantage of laser-capture microdissection over whole tissue analysis in proteomic profiling studies. Proteomics 2016, 16, 1474–1485. [Google Scholar] [CrossRef]
- Dilillo, M.; Pellegrini, D.; Ait-Belkacem, R.; de Graaf, E.L.; Caleo, M.; McDonnell, L.A. Mass Spectrometry Imaging, Laser Capture Microdissection, and LC-MS/MS of the Same Tissue Section. J. Proteome Res. 2017, 16, 2993–3001. [Google Scholar] [CrossRef]
- Emmert-Buck, M.R.; Bonner, R.F.; Smith, P.D.; Chuaqui, R.F.; Zhuang, Z.; Goldstein, S.R.; Weiss, R.A.; Liotta, L.A. Laser capture microdissection. Science 1996, 274, 998–1001. [Google Scholar] [CrossRef]
- Liu, Y.; Zhong, M. A Novel Piezoelectric Micro-Dissection Tool with Ultrasonic Vibration. Adv. Mater. Res. 2011, 239-242, 1343–1348. [Google Scholar] [CrossRef]
- Ru, C.; Liu, J.; Pang, M.; Sun, Y. Controlled ultrasonic micro-dissection of thin tissue sections. Biomed. Microdevices 2014, 16, 567–573. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, X.; Huang, H.; Chen, L.; Pan, M.; Sun, L. Design and Simulation Optimization of a Novel Oocyte Ultrasonic Micro-dissection Instrument. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 18–21 November 2018. [Google Scholar]
- Gao, X.; Huang, H.; Chen, L.; Yan, S.; Li, Y.; Sun, L. Research on Single Cell Precision Cutting Technology Based on Piezoelectric Ultrasonic Vibration. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 21–26. [Google Scholar]
- Harsch, M.; Bendrat, K.; Hofmeier, G.; Branscheid, D.; Niendorf, A. A New Method for Histological Microdissection Utilizing an Ultrasonically Oscillating Needle. Am. J. Pathol. 2001, 158, 1985–1990. [Google Scholar] [CrossRef]
- Moelans, C.B.; de Weger, R.A.; Ezendam, C.; van Diest, P.J. HER-2/neu amplification testing in breast cancer by Multiplex Ligation-dependent Probe Amplification: Influence of manual- and laser microdissection. BMC Cancer 2009, 9, 4. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Küppers, R.; Schneider, M.; Hansmann, M.L. Laser-based microdissection of single cells from tissue sections and PCR analysis of rearranged immunoglobulin genes from isolated normal and malignant human B cells. Methods Mol. Biol. (Clifton, NJ, USA) 2013, 971, 49–63. [Google Scholar] [CrossRef]
- McLachlan, J.L.; Smith, A.J.; Cooper, P.R. Piezo-power microdissection of mature human dental tissue. Arch. Oral Biol. 2003, 48, 731–736. [Google Scholar] [CrossRef]
- Sun, L.; Wang, H.; Chen, L.; Liu, Y. A novel ultrasonic micro-dissection technique for biomedicine. Ultrasonics 2006, 44 (Suppl. 1), e255–e260. [Google Scholar] [CrossRef]
- Meng, Z.; Hai, R.C. Automated and depth-controlled system for tissue dissection. In Proceedings of the 2012 IEEE-EMBS Conference on Biomedical Engineering and Sciences, Langkawi, Malaysia, 17–19 December 2012. [Google Scholar]
- Xu, Q. Precision Motion Control of Piezoelectric Nanopositioning Stage With Chattering-Free Adaptive Sliding Mode Control. IEEE Trans. Autom. Sci. Eng. 2017, 14, 238–248. [Google Scholar] [CrossRef]
- Wang, D.; Bai, Y.; Liu, Y.; Li, Z.; Tan, J. Test mass alignment using overlapped-flexure hinge in NIM-2 joule balance. Measurement 2020, 158, 107685. [Google Scholar] [CrossRef]
- Zhang, C.; Song, Y.; Ehmann, K. Design and Experimental Investigation of a Parallel Flexure Hinge-Based 3D Elliptical Vibration-Assisted Cutting Mechanism. J. Micromech. Microeng. 2020, 30. [Google Scholar] [CrossRef]
- Johnson, W.; Dai, C.; Liu, J.; Wang, X.; Luu, D.K.; Zhang, Z.; Ru, C.; Zhou, C.; Tan, M.; Pu, H.; et al. A Flexure-Guided Piezo Drill for Penetrating the Zona Pellucida of Mammalian Oocytes. IEEE Trans. Biomed. Eng. 2018, 65, 678–686. [Google Scholar] [CrossRef]
- Wu, Y.; Zhou, Z. Design of flexure hinges. Eng. Mech. 2002, 19, 136–140. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| R (mm) | t (mm) | l (mm) | b (mm) | h (mm) | Flexure Number |
|---|---|---|---|---|---|
| 0.2 | 0.6 | 2 | 2 | 1 | 9 (3 × 3) |
| Components | Material | Density ρ (g/cm3) | Young’s Modulus E (GPa) | Poisson’s Ratio |
|---|---|---|---|---|
| Dissecting needle | Tungsten | 19.35 | 405 | 0.28 |
| Flexure mechanism | 316L SS | 7.89 | 206 | 0.3 |
| Packaging Housing, Outer shell | 304 SS | 7.93 | 194.02 | 0.3 |
| Modal | 1 | 2 | 3 |
|---|---|---|---|
| Frequency (kHz) | 22.304 | 22.557 | 29.633 |
| Modal | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Frequency (kHz) | 21.64 | 23.012 | 23.648 | 27.646 | 27.936 | 28.923 | 29.017 |
| Frequency (kHz) | AZ (μm) | Ax (μm) | Ay (μm) | Ao (μm) | |
|---|---|---|---|---|---|
| Traditional mechanism | 26 | 0.779 | 0.009 | 0.069 | 0.070 |
| Flexure mechanism | 28 | 0.947 | 0.002 | 0.027 | 0.027 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Pan, Y.; Pang, Y.; Shen, H.; Gao, X.; Zhu, Y.; Chen, L.; Sun, L. Piezoelectric Ultrasonic Biological Microdissection Device Based on a Novel Flexure Mechanism for Suppressing Vibration. Micromachines 2021, 12, 196. https://doi.org/10.3390/mi12020196
Huang H, Pan Y, Pang Y, Shen H, Gao X, Zhu Y, Chen L, Sun L. Piezoelectric Ultrasonic Biological Microdissection Device Based on a Novel Flexure Mechanism for Suppressing Vibration. Micromachines. 2021; 12(2):196. https://doi.org/10.3390/mi12020196
Chicago/Turabian StyleHuang, Haibo, Yifan Pan, Yan Pang, Hao Shen, Xiwei Gao, Yichen Zhu, Liguo Chen, and Lining Sun. 2021. "Piezoelectric Ultrasonic Biological Microdissection Device Based on a Novel Flexure Mechanism for Suppressing Vibration" Micromachines 12, no. 2: 196. https://doi.org/10.3390/mi12020196
APA StyleHuang, H., Pan, Y., Pang, Y., Shen, H., Gao, X., Zhu, Y., Chen, L., & Sun, L. (2021). Piezoelectric Ultrasonic Biological Microdissection Device Based on a Novel Flexure Mechanism for Suppressing Vibration. Micromachines, 12(2), 196. https://doi.org/10.3390/mi12020196