
Characterization of an Electrode-Type Tactile Display Using Electrical and Electrostatic Friction Stimuli


Abstract
:1. Introduction
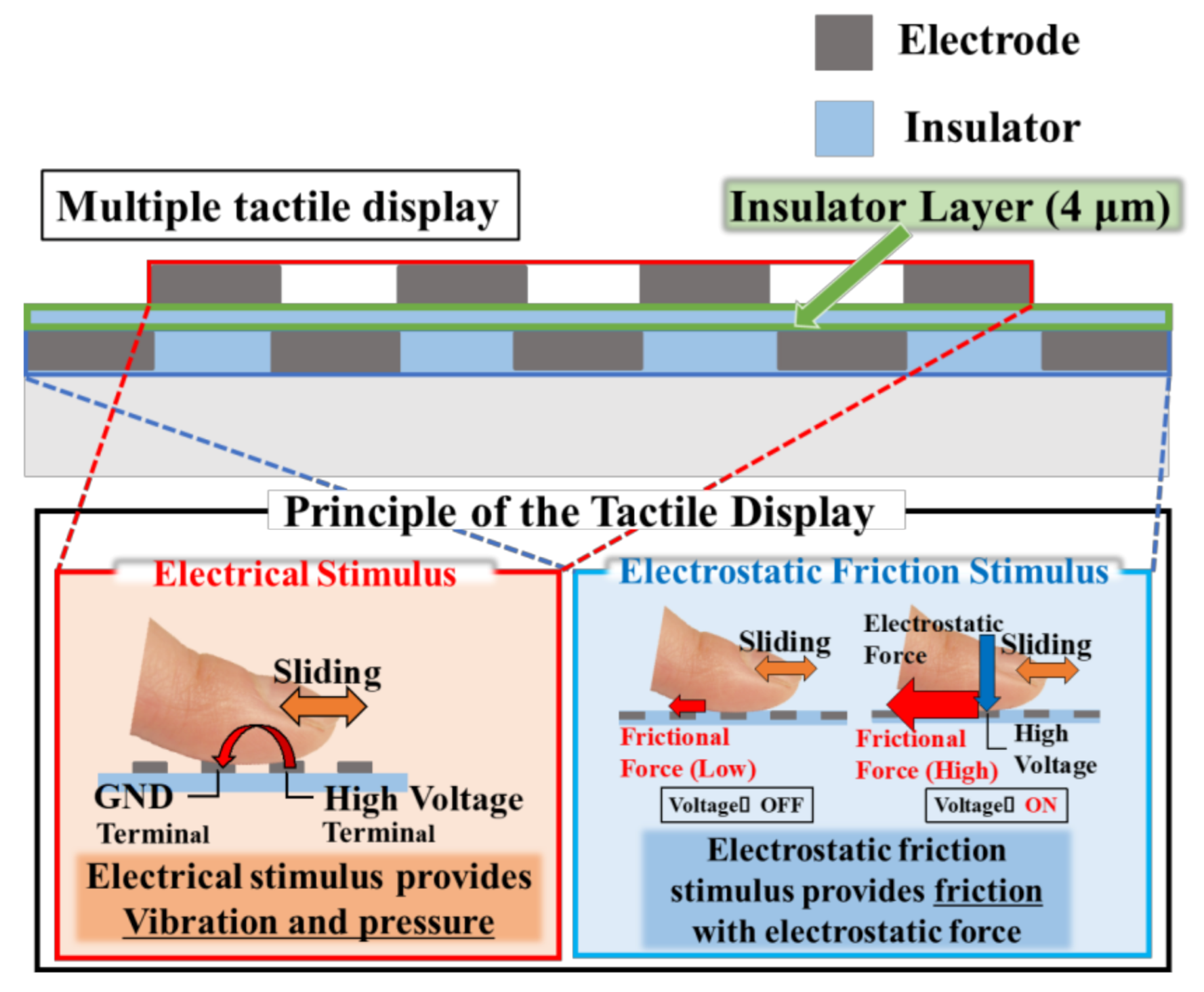
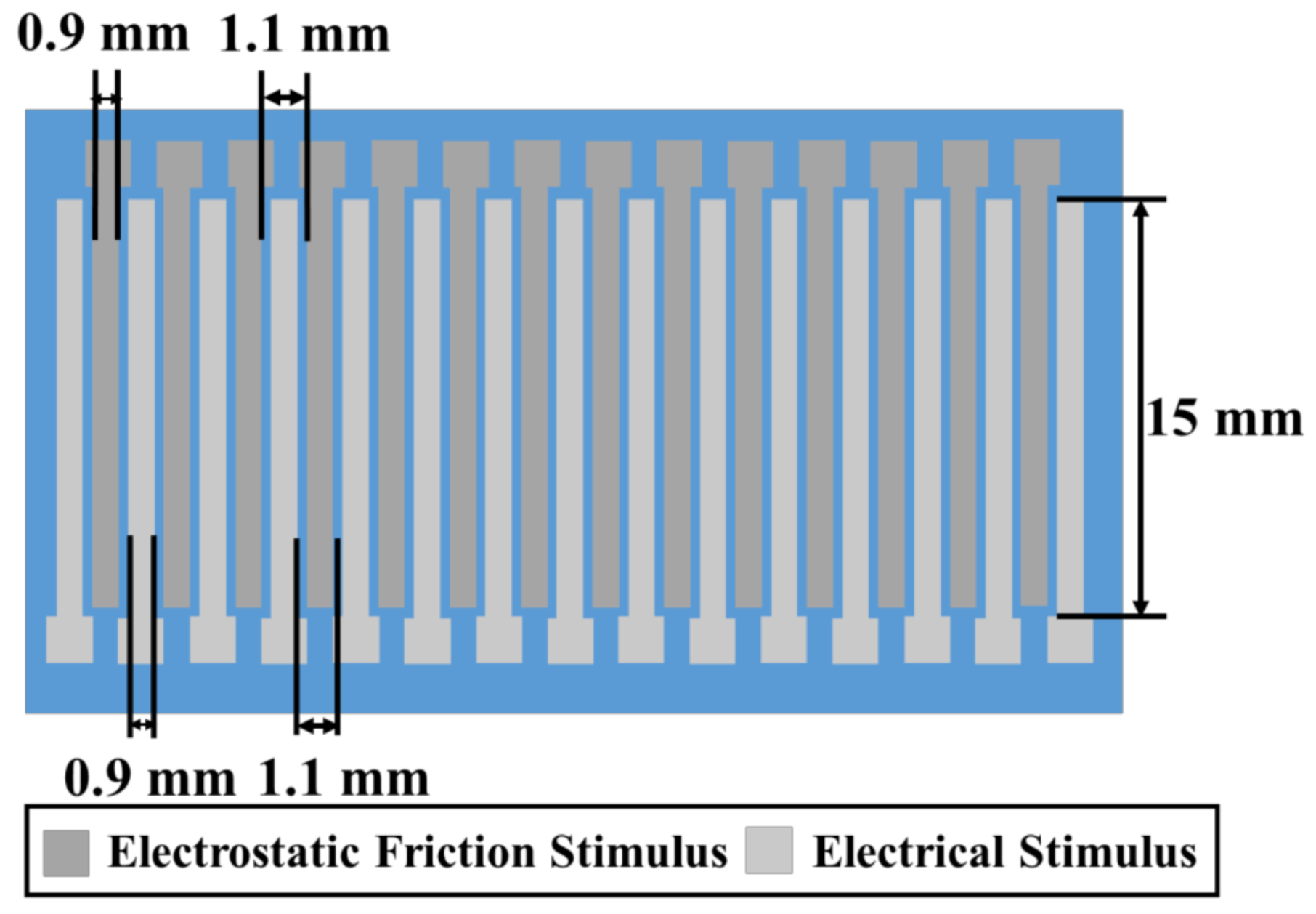
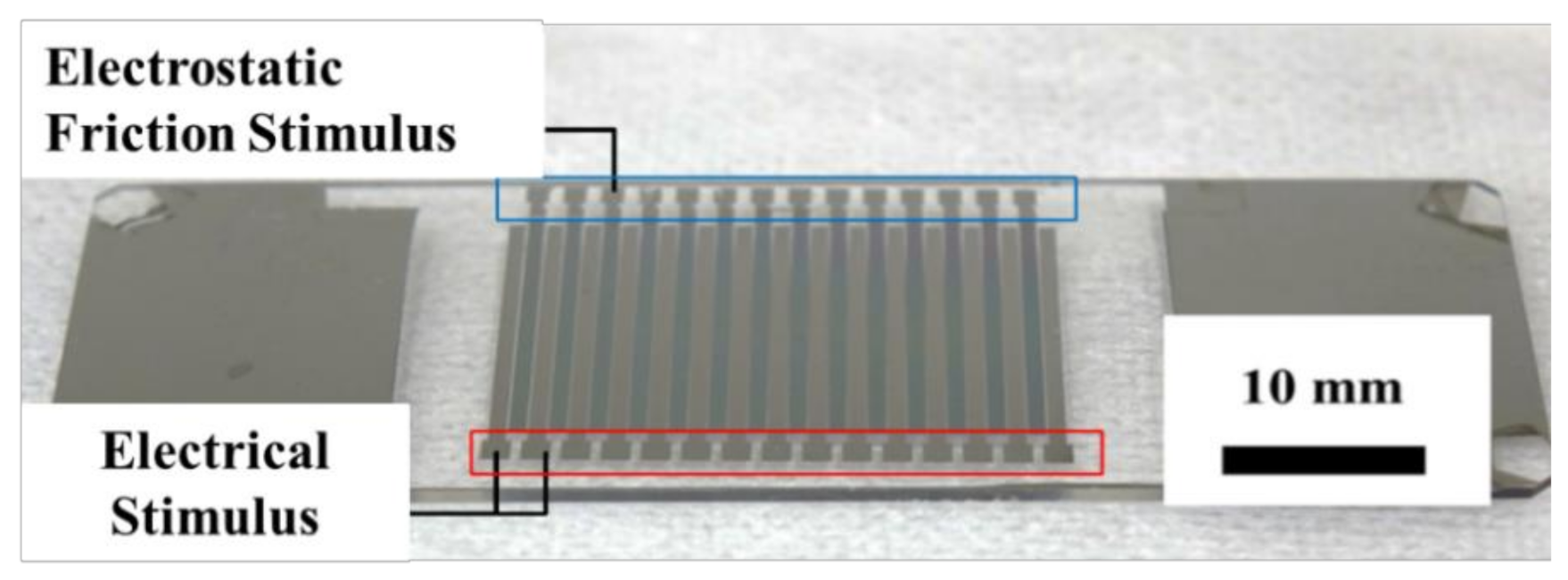
2. Design and Principle
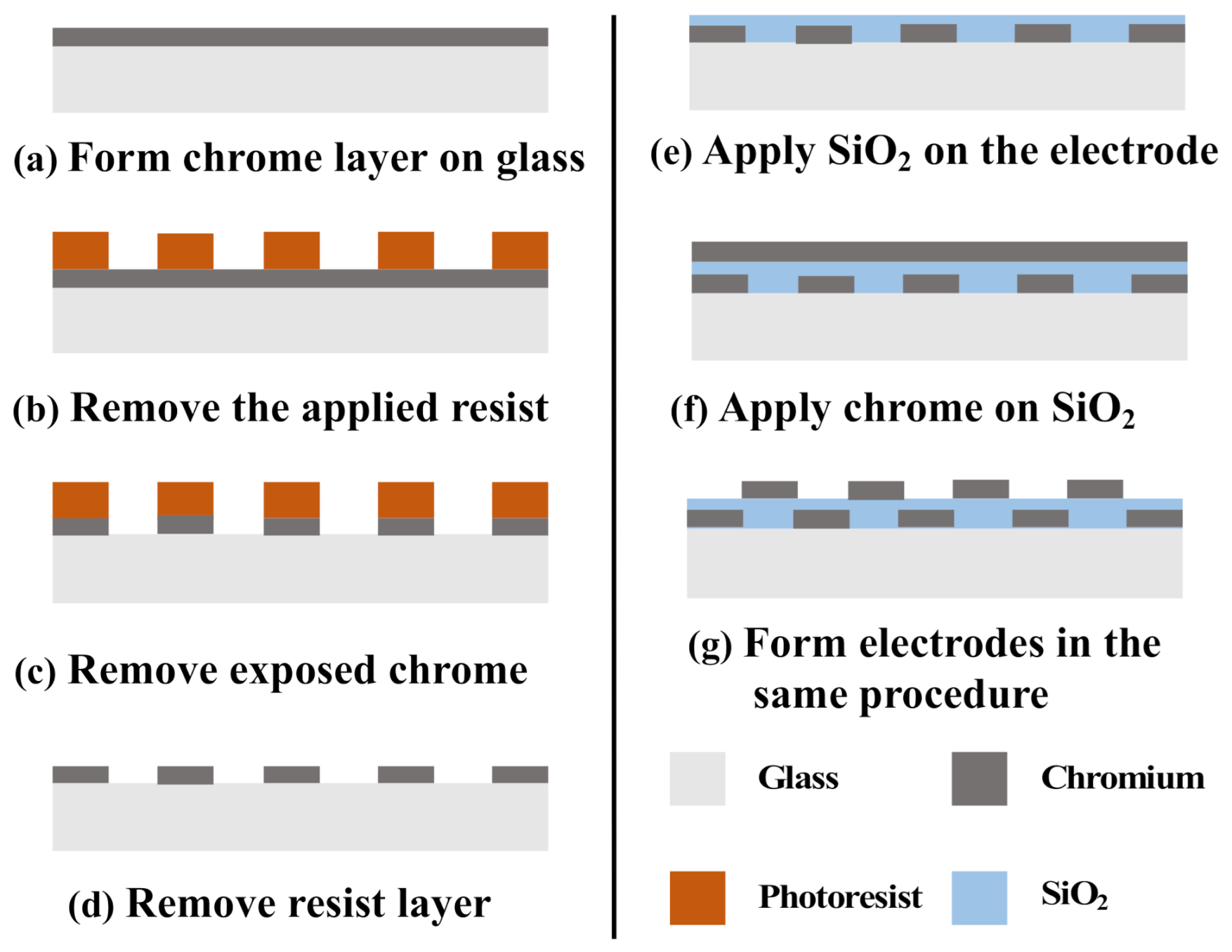
3. Fabrication Process
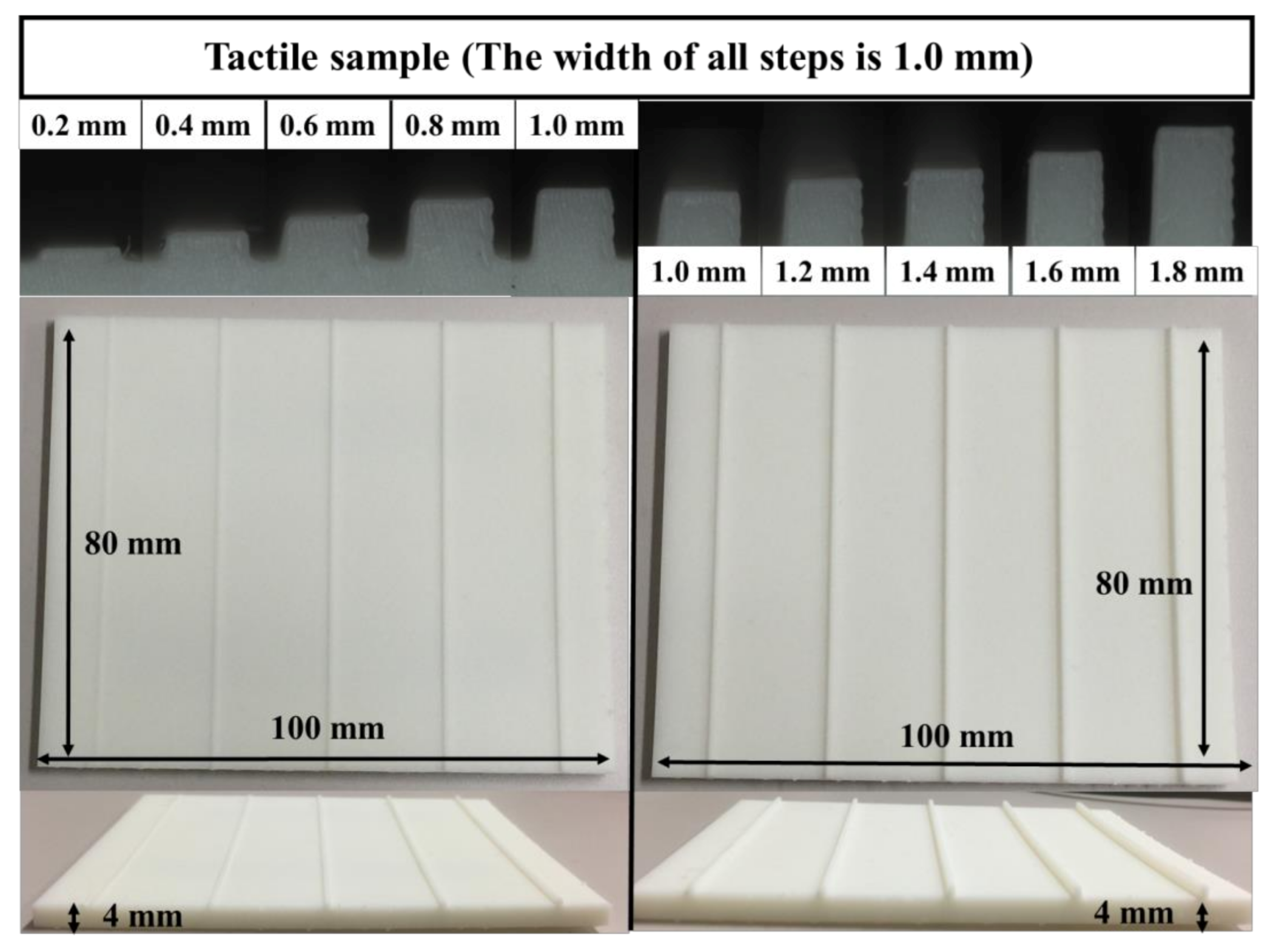
4. Experimental Procedure
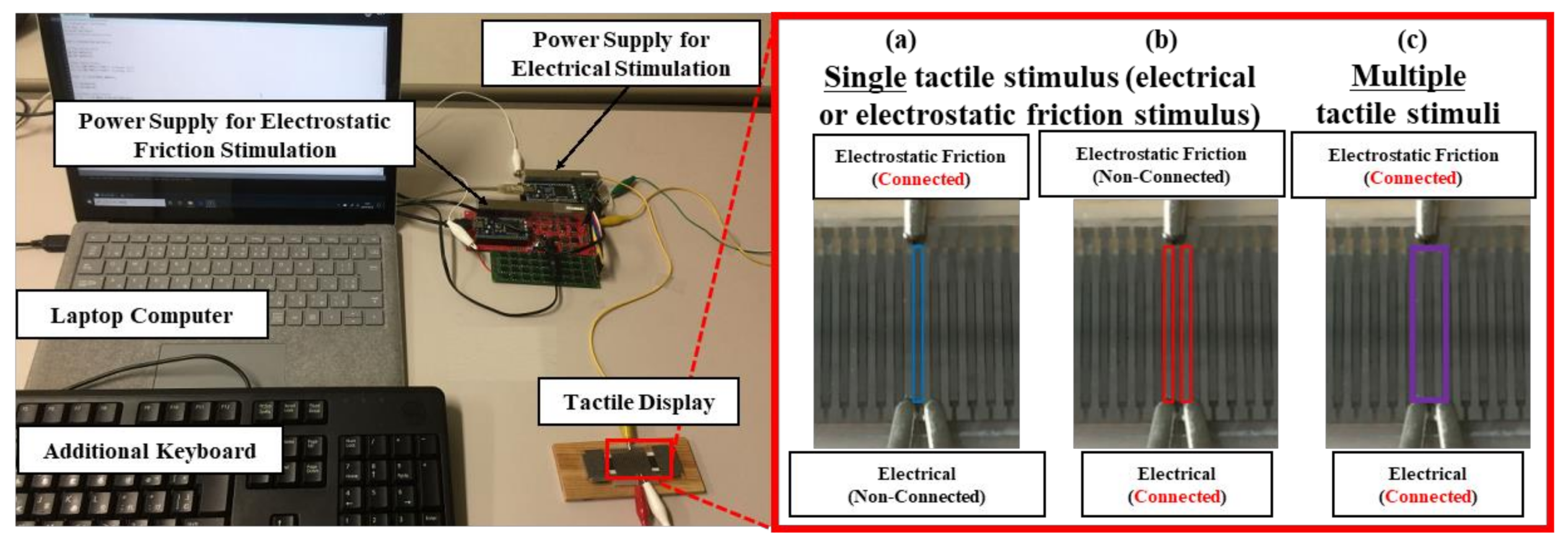
4.1. Experimental Setup
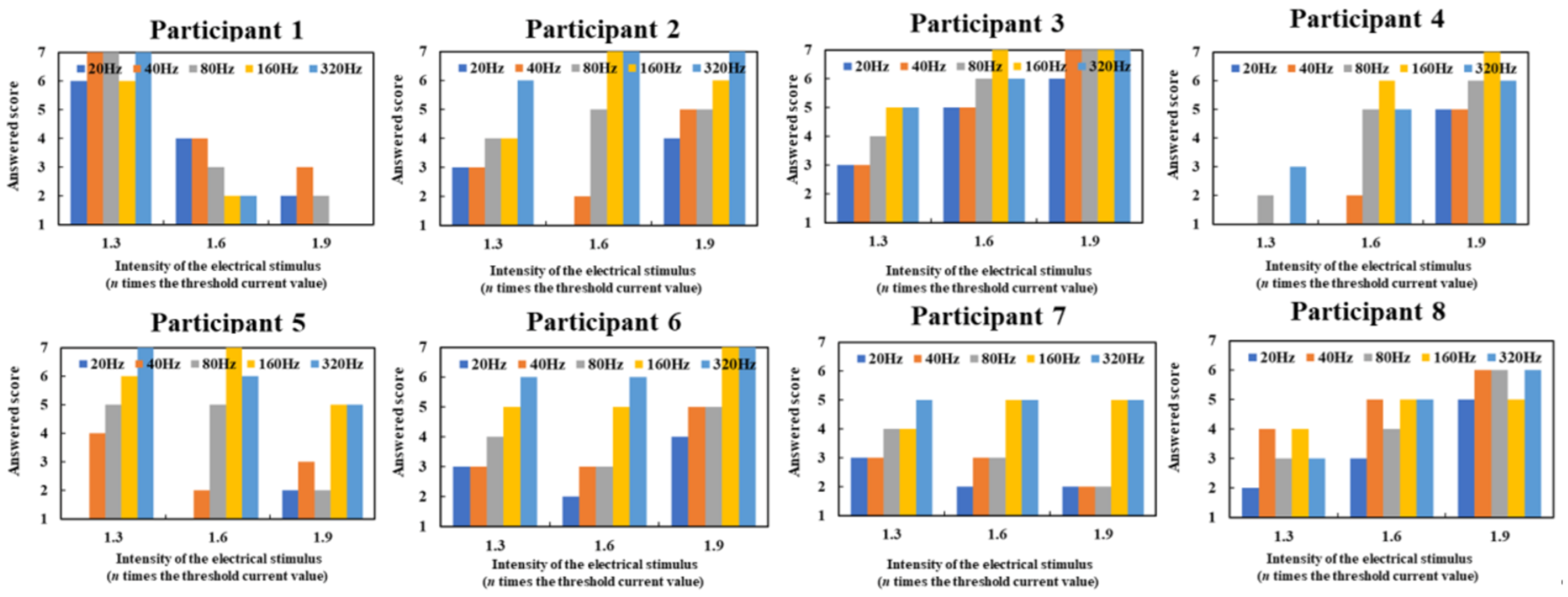
4.2. Evaluation of Electrical Stimulus
4.3. Evaluation of Electrostatic Friction Stimulus
4.4. Evaluation of Multiple Stimuli
5. Results and Discussion
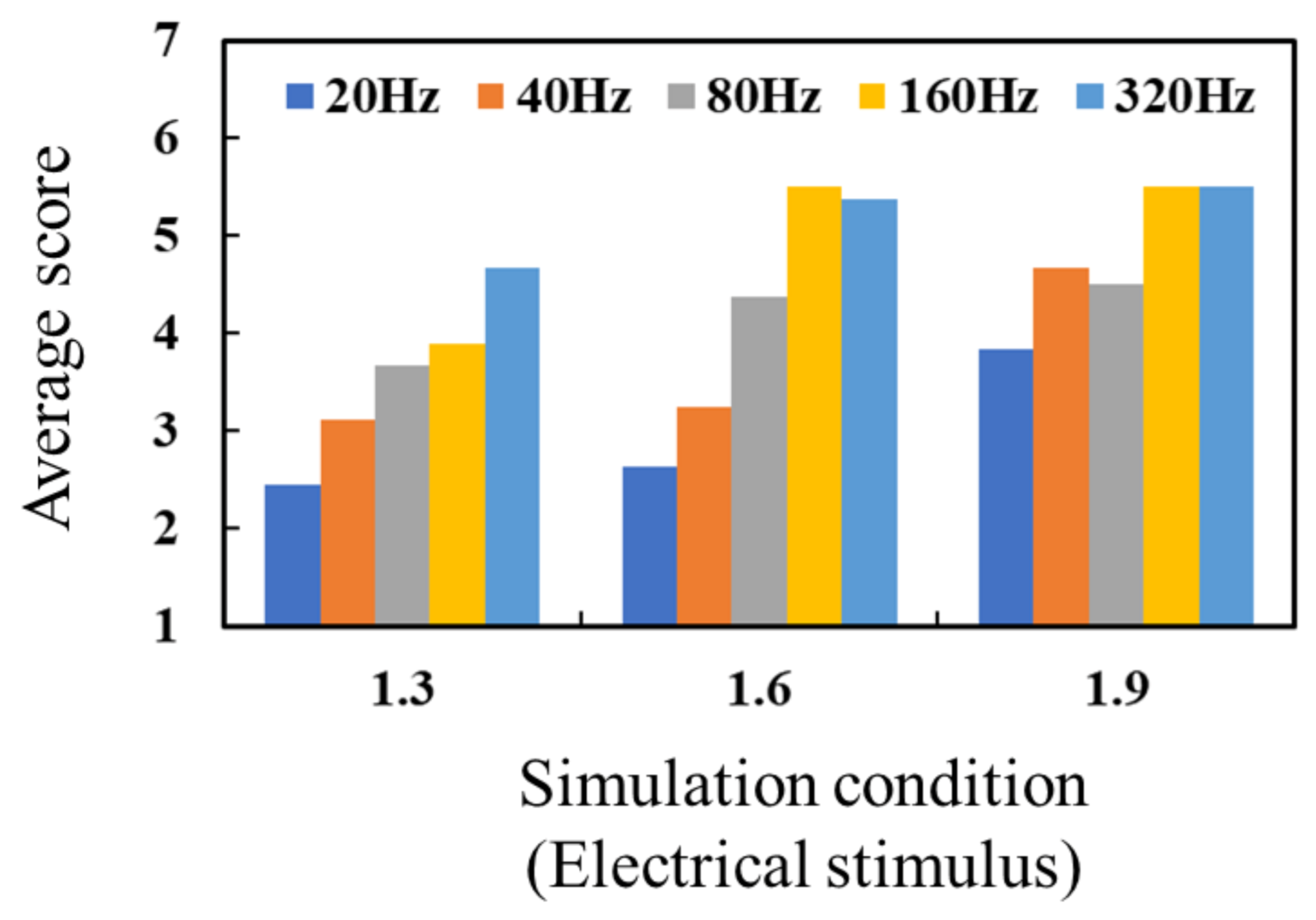
5.1. Evaluation of the Electrical Stimulus
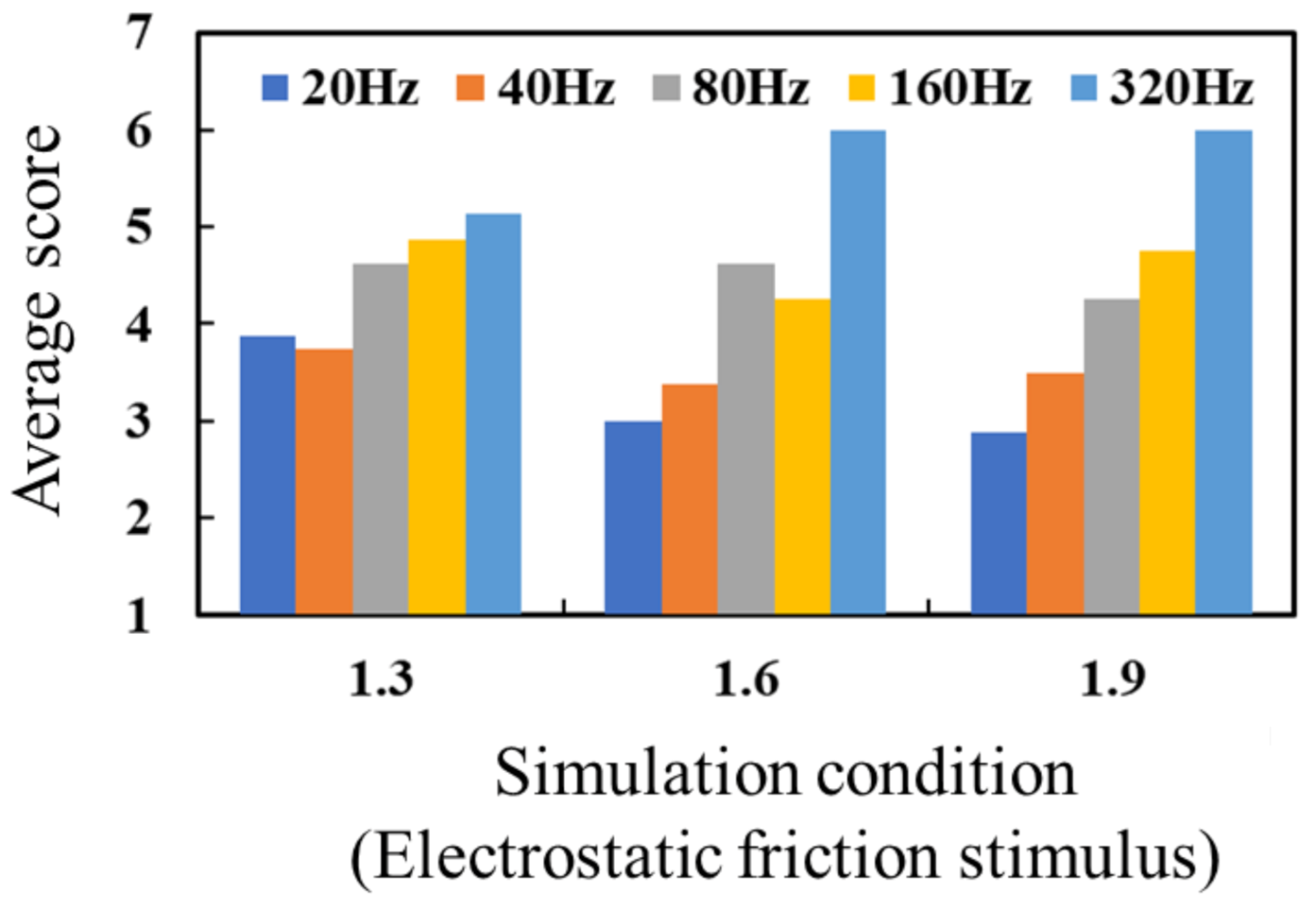
5.2. Evaluation of Electrostatic Friction Stimulus
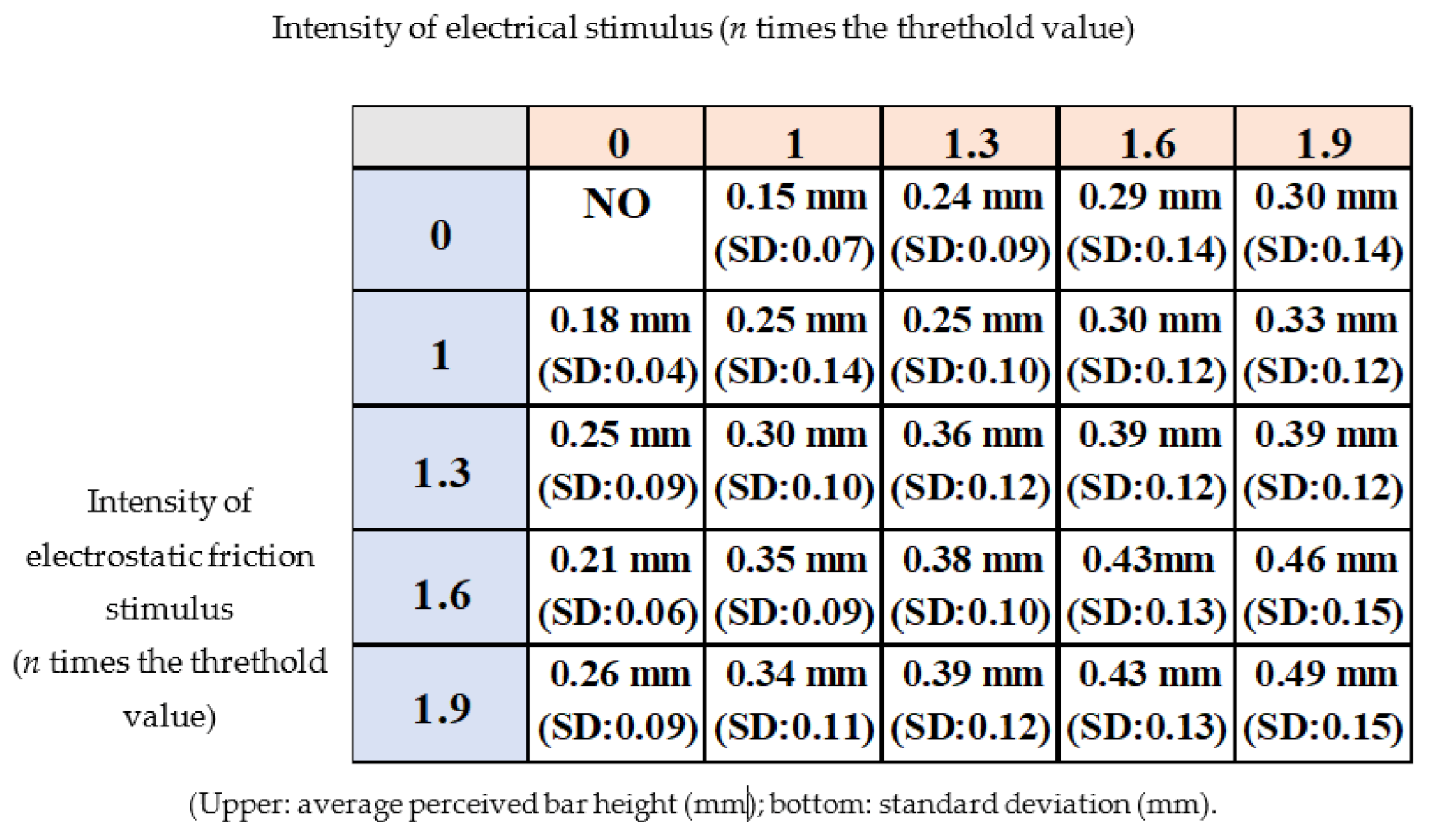
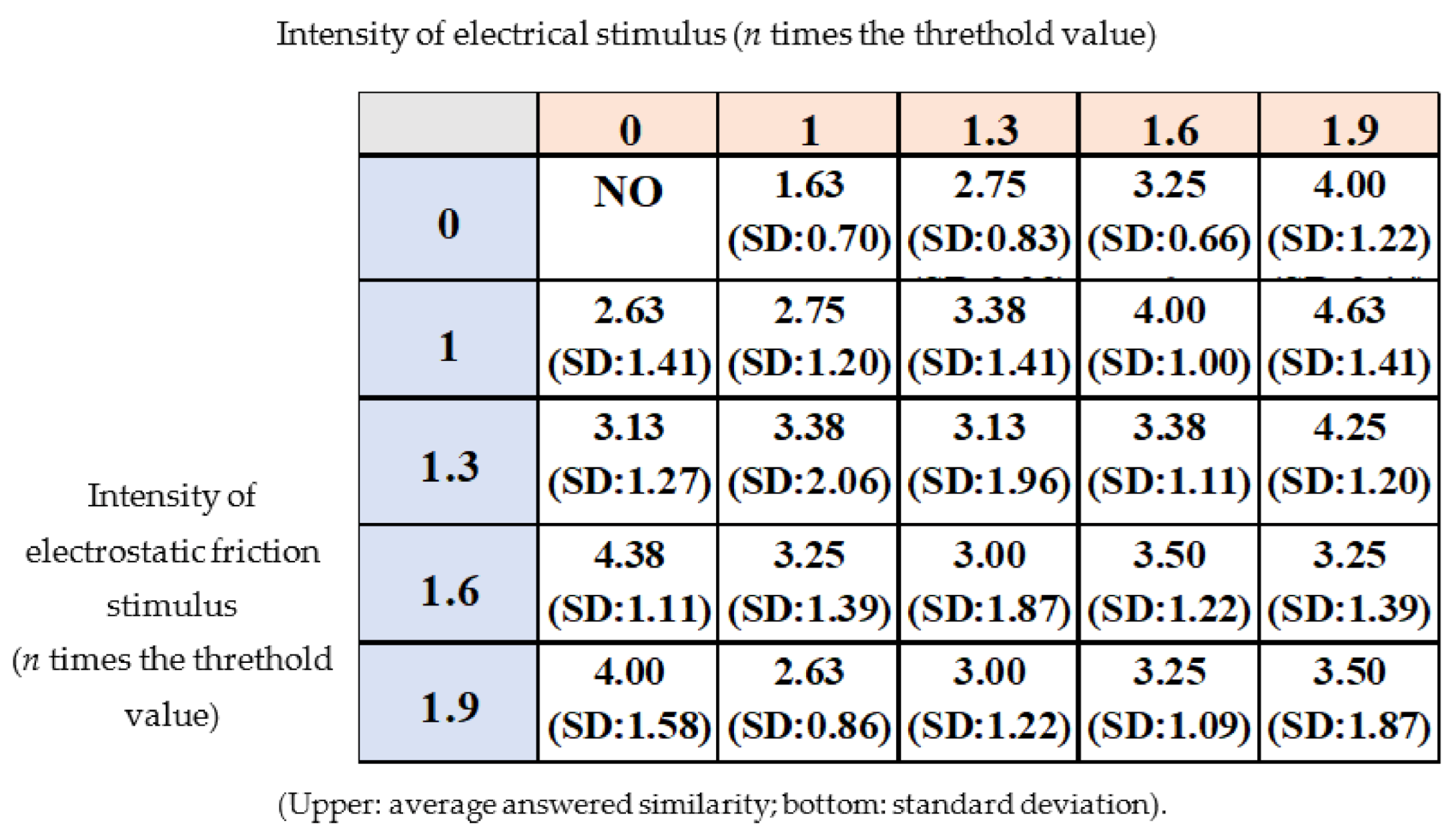
5.3. Evaluation of Multiple Stimuli
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A

Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Participant A | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 0.10 mm | 0.10 mm | 0.20 mm | 0.20 mm |
| 1 | 0.10 mm | 0.10 mm | 0.10 mm | 0.10 mm | 0.10 mm |
| 1.3 | 0.10 mm | 0.20 mm | 0.40 mm | 0.40 mm | 0.40 mm |
| 1.6 | 0.10 mm | 0.30 mm | 0.40 mm | 0.40 mm | 0.60 mm |
| 1.9 | 0.20 mm | 0.30 mm | 0.40 mm | 0.50 mm | 0.60 mm |
| Participant B | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 0.20 mm | 0.30 mm | 0.40 mm | 0.40 mm |
| 1 | 0.20 mm | 0.30 mm | 0.40 mm | 0.50 mm | 0.50 mm |
| 1.3 | 0.30 mm | 0.40 mm | 0.40 mm | 0.50 mm | 0.50 mm |
| 1.6 | 0.30 mm | 0.50 mm | 0.50 mm | 0.60 mm | 0.60 mm |
| 1.9 | 0.40 mm | 0.50 mm | 0.60 mm | 0.60 mm | 0.70 mm |
| Participant C | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 0.20 mm | 0.20 mm | 0.20 mm | 0.20 mm |
| 1 | 0.20 mm | 0.20 mm | 0.20 mm | 0.30 mm | 0.30 mm |
| 1.3 | 0.20 mm | 0.20 mm | 0.30 mm | 0.30 mm | 0.30 mm |
| 1.6 | 0.20 mm | 0.30 mm | 0.30 mm | 0.40 mm | 0.30 mm |
| 1.9 | 0.20 mm | 0.30 mm | 0.30 mm | 0.30 mm | 0.40 mm |
| Participant D | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 0.20 mm | 0.20 mm | 0.20 mm | 0.20 mm |
| 1 | 0.20 mm | 0.20 mm | 0.20 mm | 0.30 mm | 0.30 mm |
| 1.3 | 0.30 mm | 0.40 mm | 0.40 mm | 0.40 mm | 0.40 mm |
| 1.6 | 0.20 mm | 0.50 mm | 0.50 mm | 0.50 mm | 0.60 mm |
| 1.9 | 0.20 mm | 0.50 mm | 0.50 mm | 0.60 mm | 0.60 mm |
| Participant E | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 0.00 mm | 0.40 mm | 0.60 mm | 0.60 mm |
| 1 | 0.20 mm | 0.60 mm | 0.40 mm | 0.40 mm | 0.40 mm |
| 1.3 | 0.40 mm | 0.40 mm | 0.60 mm | 0.60 mm | 0.60 mm |
| 1.6 | 0.20 mm | 0.40 mm | 0.40 mm | 0.60 mm | 0.60 mm |
| 1.9 | 0.40 mm | 0.20 mm | 0.40 mm | 0.40 mm | 0.60 mm |
| Participant F | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 0.20 mm | 0.20 mm | 0.20 mm | 0.20 mm |
| 1 | 0.20 mm | 0.20 mm | 0.20 mm | 0.40 mm | 0.40 mm |
| 1.3 | 0.20 mm | 0.20 mm | 0.20 mm | 0.20 mm | 0.20 mm |
| 1.6 | 0.20 mm | 0.20 mm | 0.20 mm | 0.20 mm | 0.20 mm |
| 1.9 | 0.20 mm | 0.20 mm | 0.20 mm | 0.20 mm | 0.20 mm |
| Participant G | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 0.20 mm | 0.30 mm | 0.30 mm | 0.40 mm |
| 1 | 0.20 mm | 0.20 mm | 0.30 mm | 0.20 mm | 0.40 mm |
| 1.3 | 0.30 mm | 0.40 mm | 0.40 mm | 0.40 mm | 0.40 mm |
| 1.6 | 0.30 mm | 0.40 mm | 0.40 mm | 0.40 mm | 0.40 mm |
| 1.9 | 0.30 mm | 0.30 mm | 0.30 mm | 0.40 mm | 0.40 mm |
| Participant H | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 0.10 mm | 0.20 mm | 0.20 mm | 0.20 mm |
| 1 | 0.10 mm | 0.20 mm | 0.20 mm | 0.20 mm | 0.20 mm |
| 1.3 | 0.20 mm | 0.20 mm | 0.20 mm | 0.30 mm | 0.30 mm |
| 1.6 | 0.20 mm | 0.30 mm | 0.30 mm | 0.30 mm | 0.40 mm |
| 1.9 | 0.20 mm | 0.40 mm | 0.40 mm | 0.40 mm | 0.40 mm |
Appendix C
| Participant A | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 1 | 2 | 2 | 3 |
| 1 | 1 | 2 | 4 | 4 | 4 |
| 1.3 | 1 | 2 | 1 | 3 | 4 |
| 1.6 | 4 | 3 | 1 | 5 | 2 |
| 1.9 | 3 | 4 | 4 | 4 | 5 |
| Participant B | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 2 | 4 | 4 | 5 |
| 1 | 4 | 2 | 3 | 4 | 6 |
| 1.3 | 4 | 5 | 5 | 4 | 5 |
| 1.6 | 5 | 4 | 5 | 2 | 3 |
| 1.9 | 2 | 2 | 2 | 4 | 1 |
| Participant C | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 1 | 2 | 4 | 5 |
| 1 | 1 | 3 | 4 | 4 | 6 |
| 1.3 | 3 | 2 | 4 | 4 | 5 |
| 1.6 | 5 | 1 | 2 | 2 | 3 |
| 1.9 | 5 | 2 | 3 | 2 | 1 |
| Participant D | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 1 | 2 | 3 | 6 |
| 1 | 4 | 2 | 4 | 4 | 5 |
| 1.3 | 2 | 4 | 2 | 3 | 6 |
| 1.6 | 6 | 3 | 1 | 3 | 1 |
| 1.9 | 6 | 2 | 1 | 2 | 6 |
| Participant E | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 1 | 2 | 3 | 3 |
| 1 | 4 | 4 | 3 | 4 | 5 |
| 1.3 | 4 | 5 | 3 | 5 | 5 |
| 1.6 | 2 | 6 | 6 | 5 | 6 |
| 1.9 | 2 | 3 | 4 | 4 | 3 |
| Participant F | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 2 | 3 | 3 | 4 |
| 1 | 2 | 3 | 2 | 2 | 2 |
| 1.3 | 4 | 1 | 1 | 1 | 2 |
| 1.6 | 4 | 3 | 2 | 3 | 4 |
| 1.9 | 3 | 2 | 3 | 3 | 3 |
| Participant G | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 2 | 3 | 3 | 2 |
| 1 | 1 | 1 | 1 | 4 | 3 |
| 1.3 | 2 | 1 | 2 | 4 | 4 |
| 1.6 | 4 | 2 | 2 | 3 | 3 |
| 1.9 | 5 | 2 | 2 | 2 | 3 |
| Participant H | |||||
| 0 | 1 | 1.3 | 1.6 | 1.9 | |
| 0 | NO | 3 | 4 | 4 | 4 |
| 1 | 4 | 5 | 6 | 6 | 6 |
| 1.3 | 5 | 7 | 7 | 3 | 3 |
| 1.6 | 5 | 4 | 5 | 5 | 4 |
| 1.9 | 6 | 4 | 5 | 5 | 6 |
References
- Chouvardas, V.G. Tactile displays: A short overview and recent developments. In Proceedings of the 5th International Conference on Technology and Automation, Thessaloniki, Greece, 15–16 October 2005; pp. 246–251. [Google Scholar]
- Ishizuka, H.; Miki, N. MEMS-based tactile displays. Displays 2015, 37, 25–32. [Google Scholar] [CrossRef]
- Pacchierotti, C.; Sinclair, S.; Solazzi, M.; Frisoli, A.; Hayward, V.; Prattichizzo, D. Wearable haptic systems for the fingertip and the hand: Taxonomy, review, and perspectives. IEEE Trans. Haptics 2017, 10, 580–600. [Google Scholar] [CrossRef] [Green Version]
- Yamamoto, A.; Nagasawa, S.; Yamamoto, H.; Higuchi, T. Electrostatic tactile display with thin film slider and its application to tactile telepresentation systems. IEEE Trans. Vis. Comput. Graph. 2006, 12, 168–177. [Google Scholar] [CrossRef]
- Tzemanaki, A.; Al, G.A.; Melhuish, C.; Dogramadzi, S. Design of a wearable fingertip haptic device for remote palpation: Characterisation and interface with a virtual environment. Front. Robot. AI 2018, 5, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Okamura, A.M.; Dennerlein, J.T.; Howe, R.D. Vibration feedback models for virtual environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Leuven, Belgium, 20 May 1998; pp. 674–679. [Google Scholar]
- Jang, S.; Kim, L.H.; Tanner, K.; Ishii, H.; Follmer, S. Haptic edge display for mobile tactile interaction. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 7–12 May 2016; pp. 3706–3716. [Google Scholar]
- Lévesque, V.; Pasquero, J.; Hayward, V.; Legault, M. Display of virtual braille dots by lateral skin deformation: Feasibility study. ACM Trans. Appl. Percept. 2005, 2, 132–149. [Google Scholar] [CrossRef]
- Zhao, F.; Fukuyama, K.; Sawada, H. Compact Braille display using SMA wire array. In Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 28–33. [Google Scholar]
- Kajimoto, H.; Jones, L.A. Wearable tactile display based on thermal expansion of nichrome wire. IEEE Trans. Haptics 2019, 12, 257–268. [Google Scholar] [CrossRef] [PubMed]
- Shao, Y.; Ma, S.; Yoon, S.H.; Visell, Y.; Holbery, J. SurfaceFlow: Large area haptic display via compliant liquid dielectric actuators. In Proceedings of the IEEE Haptics Symposium, HAPTICS, Crystal City, VA, USA, 28–31 March 2020; pp. 815–820. [Google Scholar]
- Tomita, H.; Saga, S.; Takahashi, S.; Kajimoto, H. A proposal and investigation of displaying method by passive touch with electrostatic tactile display. In Proceedings of the Eurohaptics, Leiden, The Netherlands, 6–9 September 2020; pp. 353–361. [Google Scholar]
- Sonar, H.A.; Gerratt, A.P.; Lacour, S.P.; Paik, J. Closed-loop haptic feedback control using a self-sensing soft pneumatic actuator skin. Soft Robot. 2020, 7, 22–29. [Google Scholar] [CrossRef] [PubMed]
- Kajimoto, H.; Kawakami, N.; Tachi, S. Electro-Tactile Display with Tactile Primary Color Approach. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; p. 6. [Google Scholar]
- Yem, V.; Kajimoto, H. Comparative evaluation of tactile sensation by electrical and mechanical stimulation. IEEE Trans. Haptics 2016, 1–6. [Google Scholar] [CrossRef]
- Kajimoto, H. Electrotactile display with real-time impedance feedback using pulse width modulation. IEEE Trans. Haptics 2012, 5, 184–188. [Google Scholar] [CrossRef]
- Biet, M.; Giraud, F.; Lemaire-Semail, B. Squeeze film effect for the design of an ultrasonic tactile plate. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 2678–2688. [Google Scholar] [CrossRef] [Green Version]
- Mallinckrodt, E.; Hughes, A.L.; Sleator, W. Perception by the skin of electrically induced vibrations. Science 1953, 118, 277–278. [Google Scholar] [CrossRef] [PubMed]
- Strong, R.M.; Troxel, D.E. An electrotactile display. IEEE Trans. Man Mach. Syst. 1970, 11, 72–79. [Google Scholar] [CrossRef]
- Bergmann Tiest, W.M. Tactual perception of material properties. Vis. Res. 2010, 50, 2775–2782. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Okamoto, S.; Nagano, H.; Yamada, Y. Psychophysical dimensions of tactile perception of textures. IEEE Trans. Haptics 2013, 6, 81–93. [Google Scholar] [CrossRef] [PubMed]
- Ballesteros, S.; Reales, J.M.; De Leon, L.P.; Garcia, B. The perception of ecological textures by touch: Does the perceptual space change under bimodal visual and haptic exploration? In Proceedings of the World Haptics Conference, Pisa, Italy, 18–20 March 2005; pp. 635–638. [Google Scholar]
- Shirado, H.; Maeno, T. Modeling of human texture perception for tactile displays and sensors. In Proceedings of the World Haptics Conference, Pisa, Italy, 18–20 March 2005; pp. 629–630. [Google Scholar]
- Guest, S.; Dessirier, J.M.; Mehrabyan, A.; McGlone, F.; Essick, G.; Gescheider, G.; Fontana, A.; Xiong, R.; Ackerley, R.; Blot, K. The development and validation of sensory and emotional scales of touch perception. Atten. Percept. Psychophys. 2011, 73, 531–550. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoshioka, T.; Bensmaïa, S.J.; Craig, J.C.; Hsiao, S.S. Texture perception through direct and indirect touch: An analysis of perceptual space for tactile textures in two modes of exploration. Somatosens. Mot. Res. 2007, 24, 53–70. [Google Scholar] [CrossRef] [PubMed]
- Hollins, M.; Risner, S.R. Evidence for the duplex theory of tactile texture perception. Percept. Psychophys. 2000, 62, 695–705. [Google Scholar] [CrossRef] [Green Version]
- Ito, K.; Okamoto, S.; Yamada, Y. Tactile texture display with vibrotactile and electrostatic friction stimuli mixed at appropriate ratio presents better. ACM Trans. Appl. Percept. 2019, 16, 20. [Google Scholar] [CrossRef]
- Komurasaki, S.; Kajimoto, H.; Ishizuka, H. Fundamental perceptual characterization of an integrated tactile display with electrovibration and electrical stimuli. Micromachines 2019, 10, 301. [Google Scholar] [CrossRef] [Green Version]
- Kajimoto, H.; Kawakami, N.; Tachi, S.; Inami, M. SmartTouch: Electric skin to touch the untouchable. IEEE Comput. Graph. Appl. 2004, 24, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Haghighi Osgouei, R.; Kim, J.R.; Choi, S. Data-driven texture modeling and rendering on electrovibration display. IEEE Trans. Haptics 2020, 13, 298–311. [Google Scholar] [CrossRef] [Green Version]
- Jiao, J.; Member, S.; Zhang, Y.; Member, S.; Wang, D.; Member, S.; Visell, Y.; Cao, D.; Guo, X.; Sun, X. Data-driven rendering of fabric textures on electrostatic tactile displays. In Proceedings of the 2018 IEEE Haptics Symposium (HAPTICS), San Francisco, CA, USA, 25–28 March 2018; pp. 169–174. [Google Scholar]
- Vardar, Y.; Guclu, B.; Basdogan, C. Effect of waveform on tactile perception by electrovibration displayed on touch screens. IEEE Trans. Haptics 2017, 10, 488–499. [Google Scholar] [CrossRef] [PubMed]
- Kaczmarek, K.A.; Webster, J.G.; Bach-y-Rita, P.; Tompkins, W.J. Electrotactile and vibrotactile displays for sensory substitution systems. IEEE Trans. Biomed. Eng. 1991, 38, 1–16. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ara, J.; Hwang, S.H.; Song, T.; Khang, G. Effects of the stimulus parameters on the tactile sensations elicited by single-channel transcutaneous electrical stimulation. Int. J. Precis. Eng. Manuf. 2014, 15, 305–313. [Google Scholar] [CrossRef]
- Ishizuka, H.; Suzuki, K.; Terao, K.; Takao, H.; Shimokawa, F.; Kajimoto, H. Development of a multi-electrode electrovibration tactile display with 1 mm resolution. In Proceedings of the 2017 IEEE World Haptics Conference, Munich, Germany, 6–9 June 2017; pp. 653–658. [Google Scholar]
- Muniak, M.A.; Ray, S.; Hsiao, S.S.; Dammann, J.F.; Bensmaia, S.J. The neural coding of stimulus intensity: Linking the population response of mechanoreceptive afferents with psychophysical behavior. J. Neurosci. 2007, 27, 11687–11699. [Google Scholar] [CrossRef] [PubMed]
- Bau, O.; Poupyrev, I.; Israr, A.; Harrison, C. TeslaTouch: Electrovibration for touch surfaces. In Proceedings of the ACM Symposium on User Interface Software and Technology, New York, NY, USA, 3–6 October 2010; pp. 283–292. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Komurasaki, S.; Kajimoto, H.; Shimokawa, F.; Ishizuka, H. Characterization of an Electrode-Type Tactile Display Using Electrical and Electrostatic Friction Stimuli. Micromachines 2021, 12, 313. https://doi.org/10.3390/mi12030313
Komurasaki S, Kajimoto H, Shimokawa F, Ishizuka H. Characterization of an Electrode-Type Tactile Display Using Electrical and Electrostatic Friction Stimuli. Micromachines. 2021; 12(3):313. https://doi.org/10.3390/mi12030313
Chicago/Turabian StyleKomurasaki, Seiya, Hiroyuki Kajimoto, Fusao Shimokawa, and Hiroki Ishizuka. 2021. "Characterization of an Electrode-Type Tactile Display Using Electrical and Electrostatic Friction Stimuli" Micromachines 12, no. 3: 313. https://doi.org/10.3390/mi12030313