
Multi-Directional Universal Energy Harvesting Ball


Abstract
:1. Introduction
2. Materials and Methods
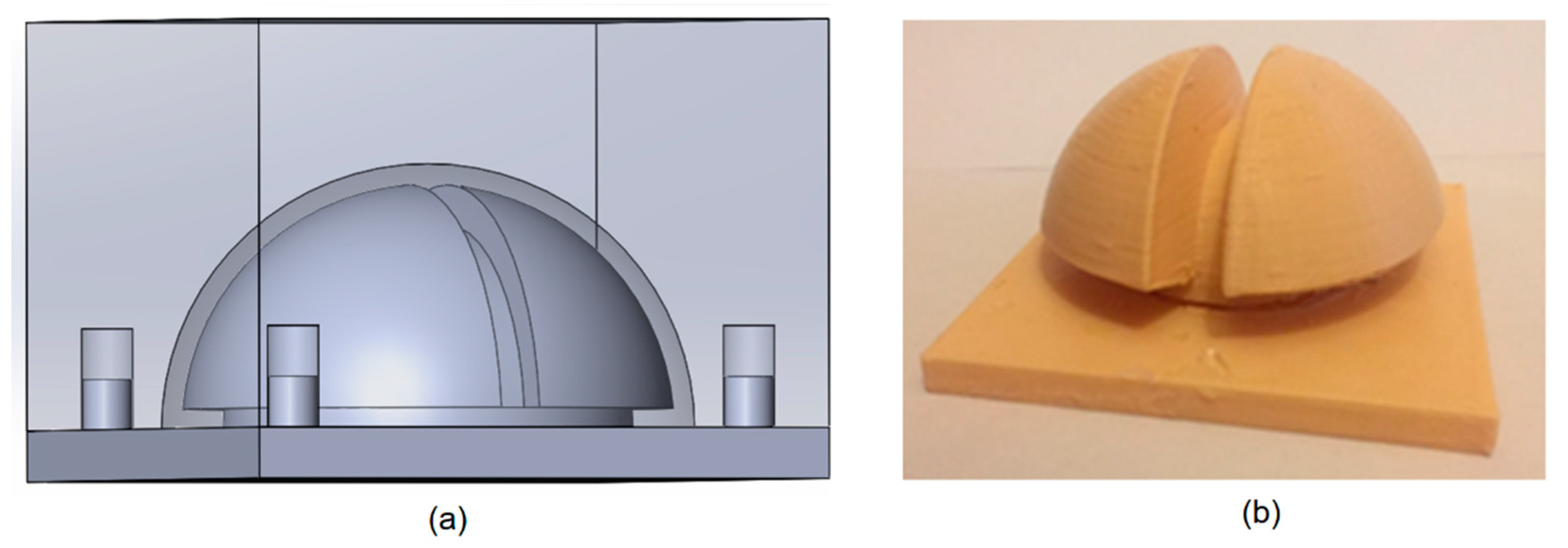
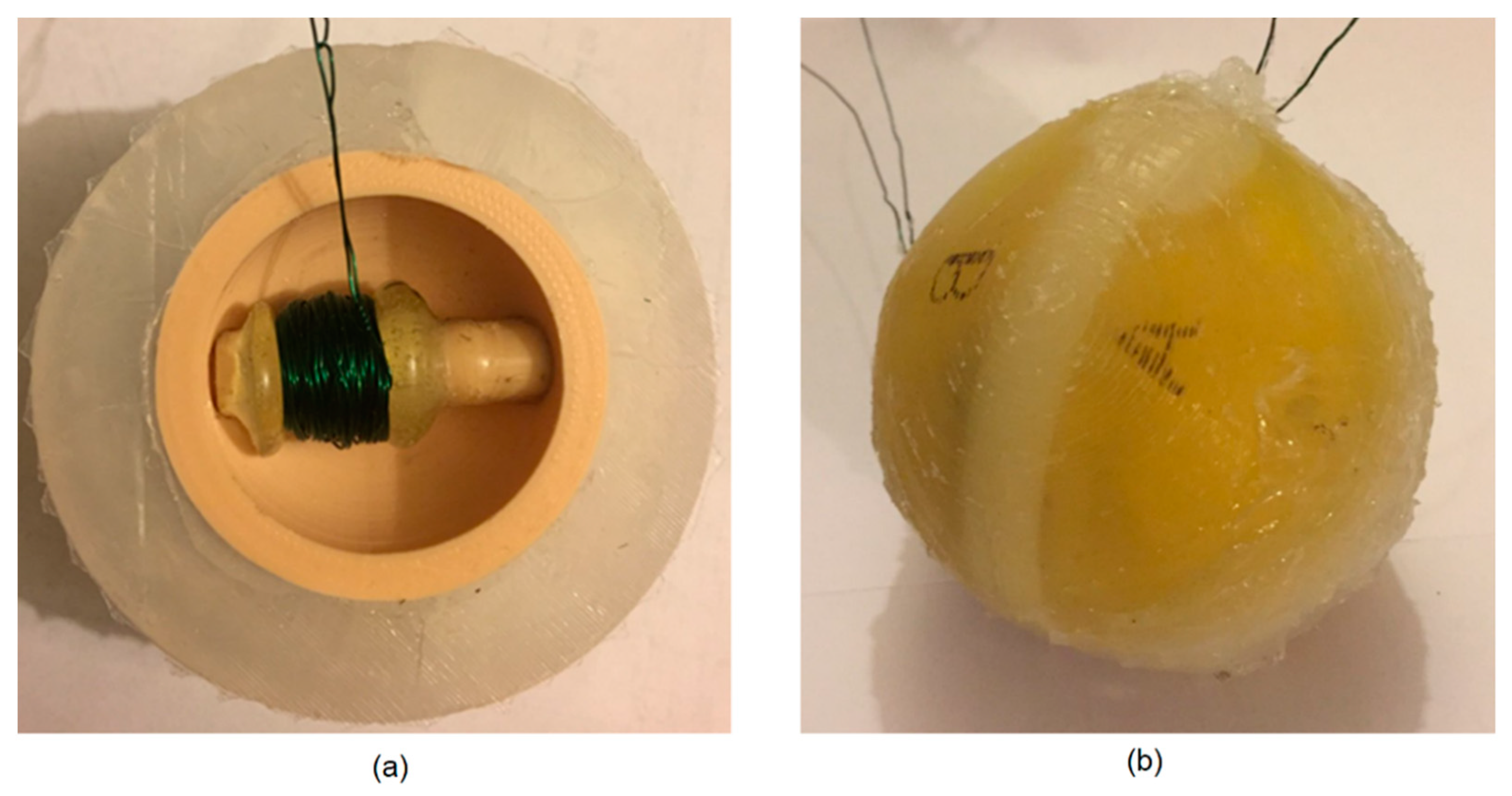
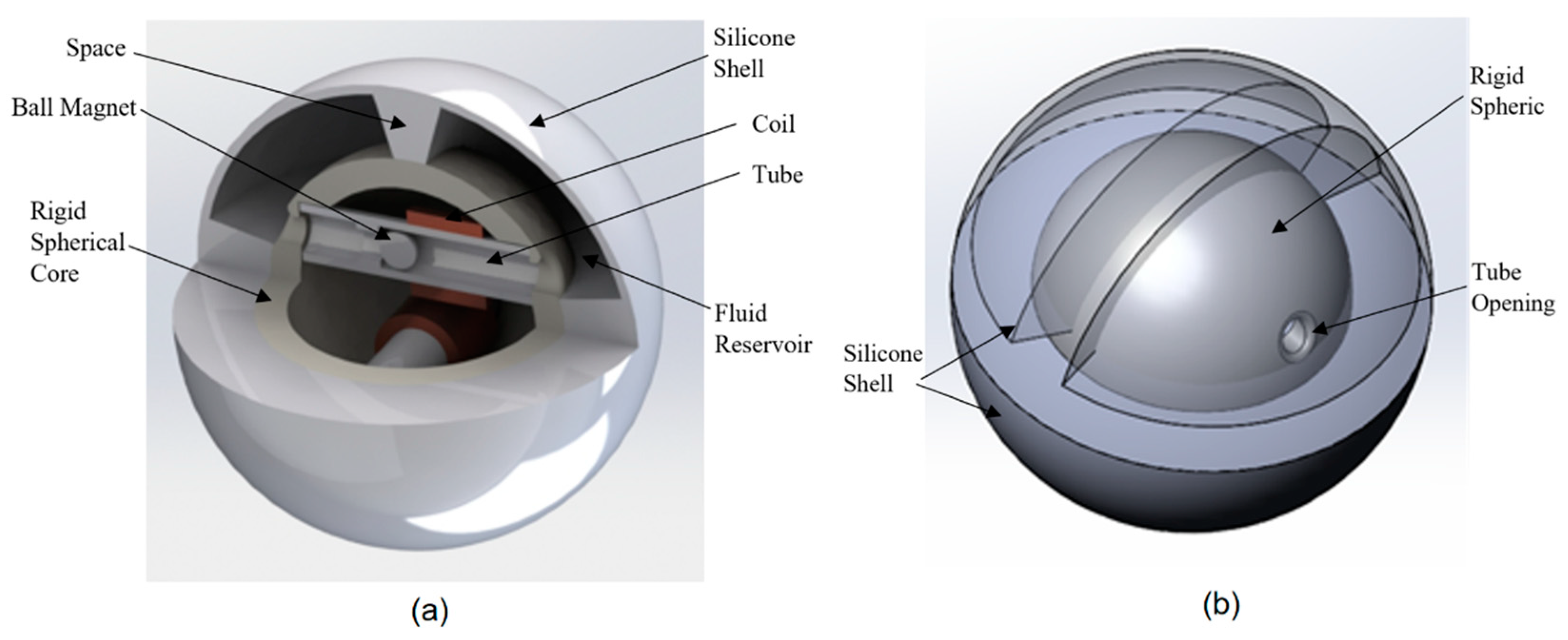
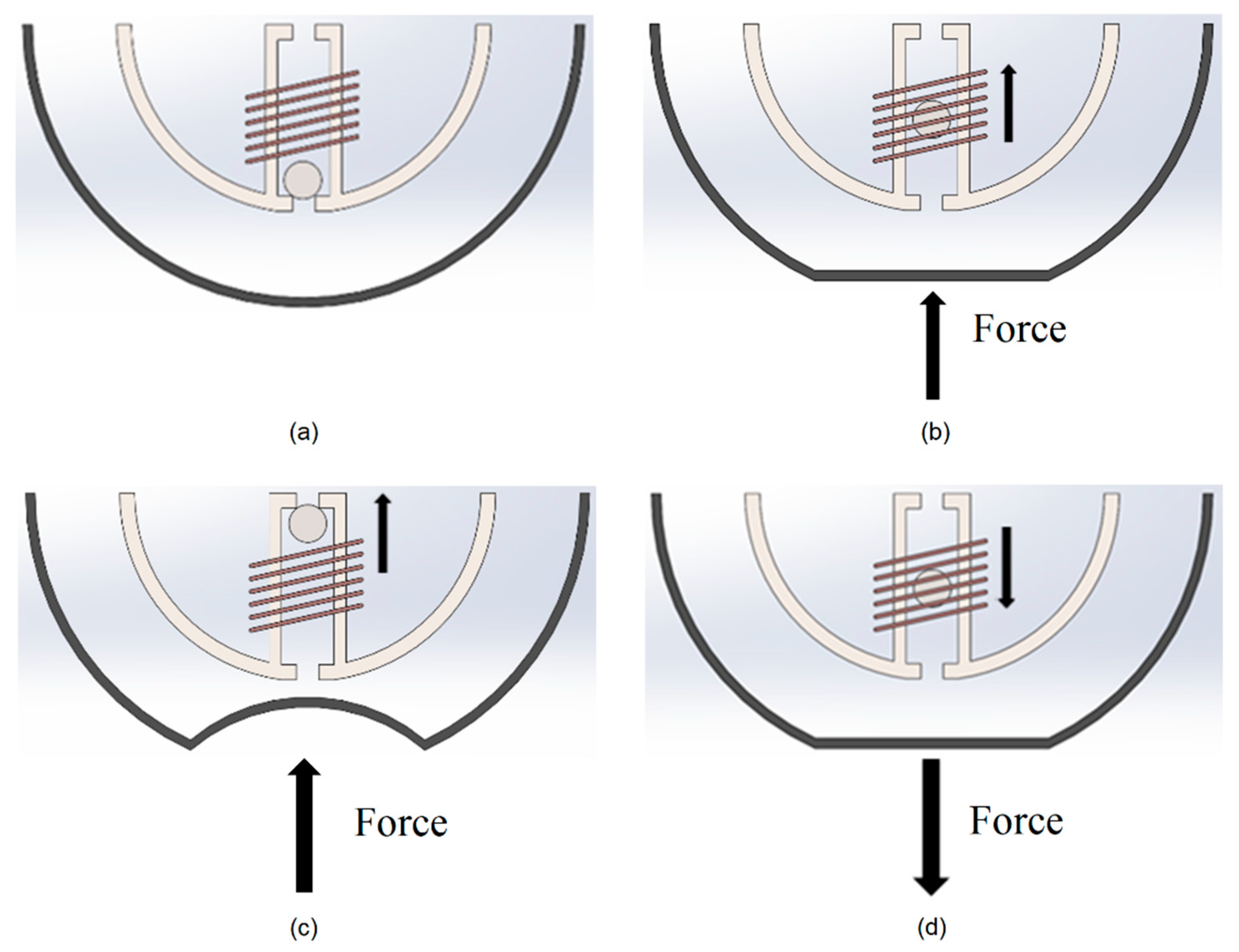
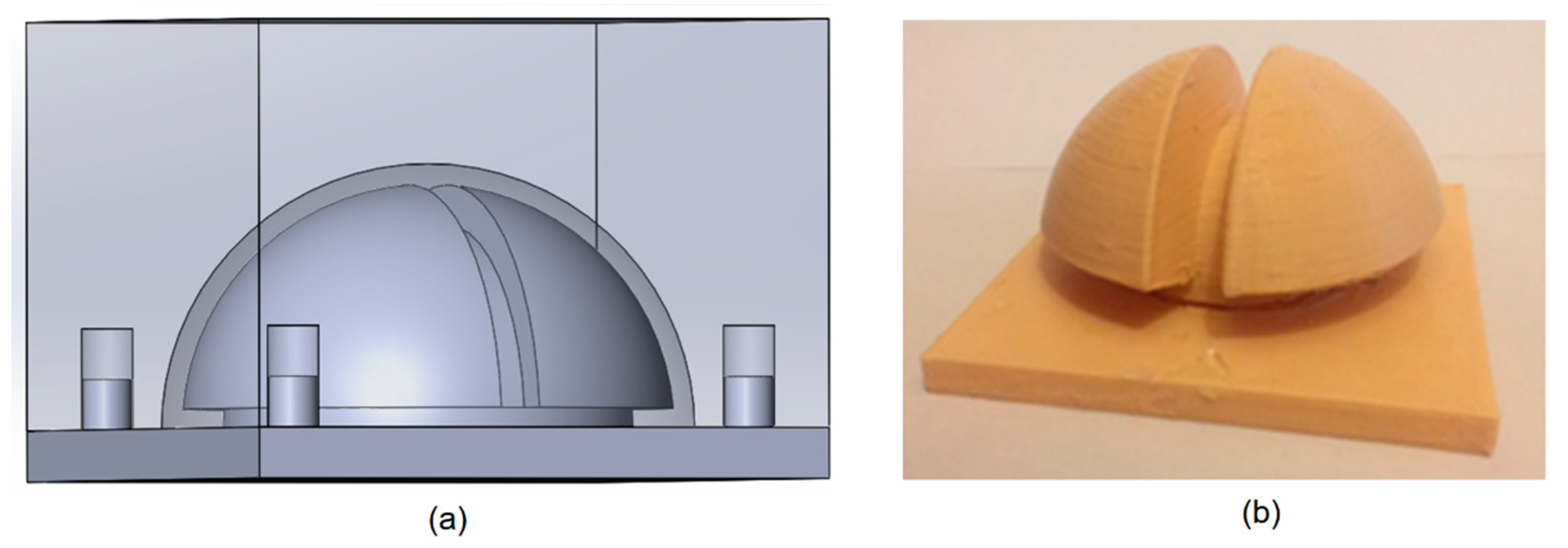
2.1. Design
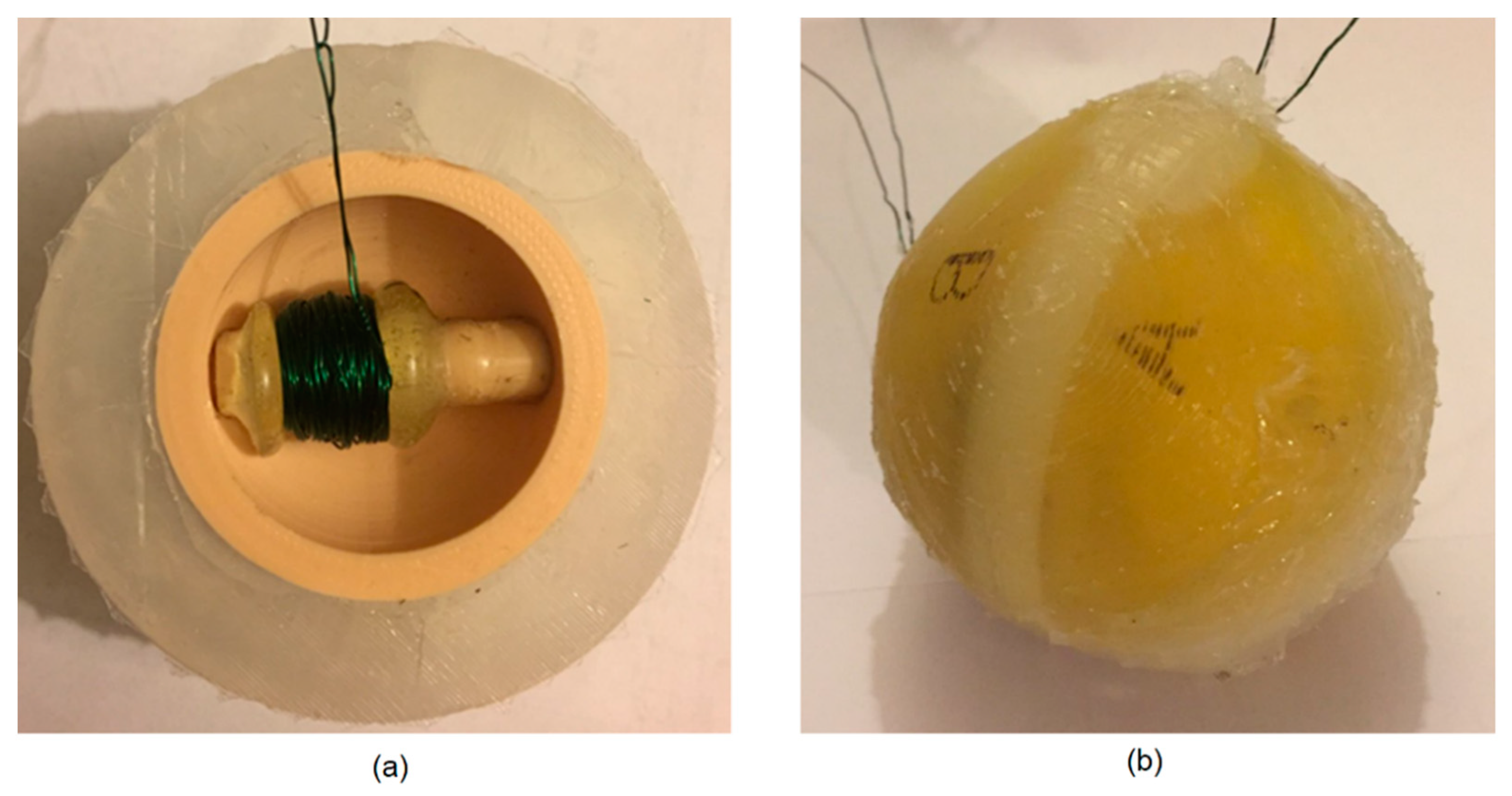
2.2. Device Fabrication
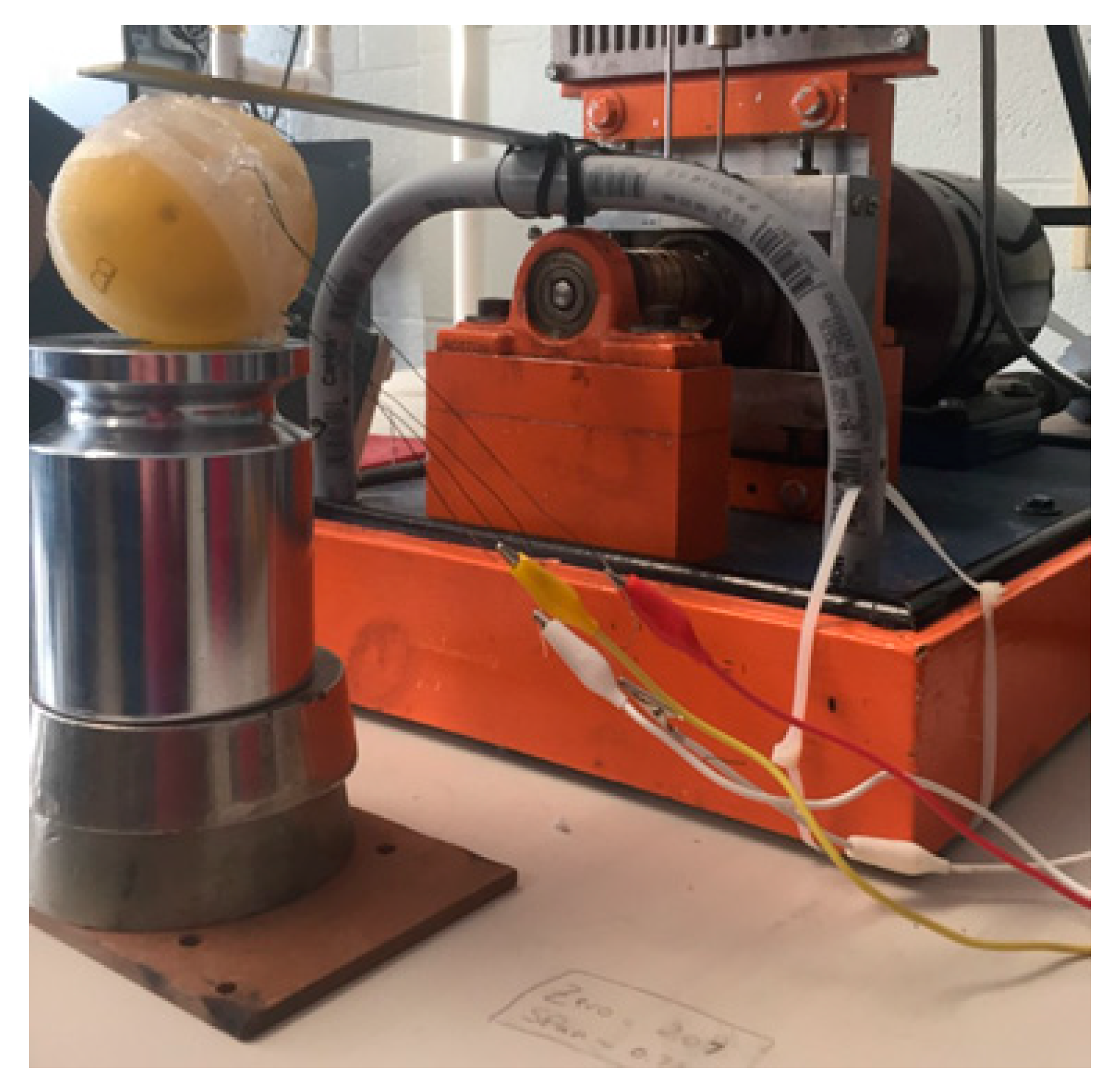
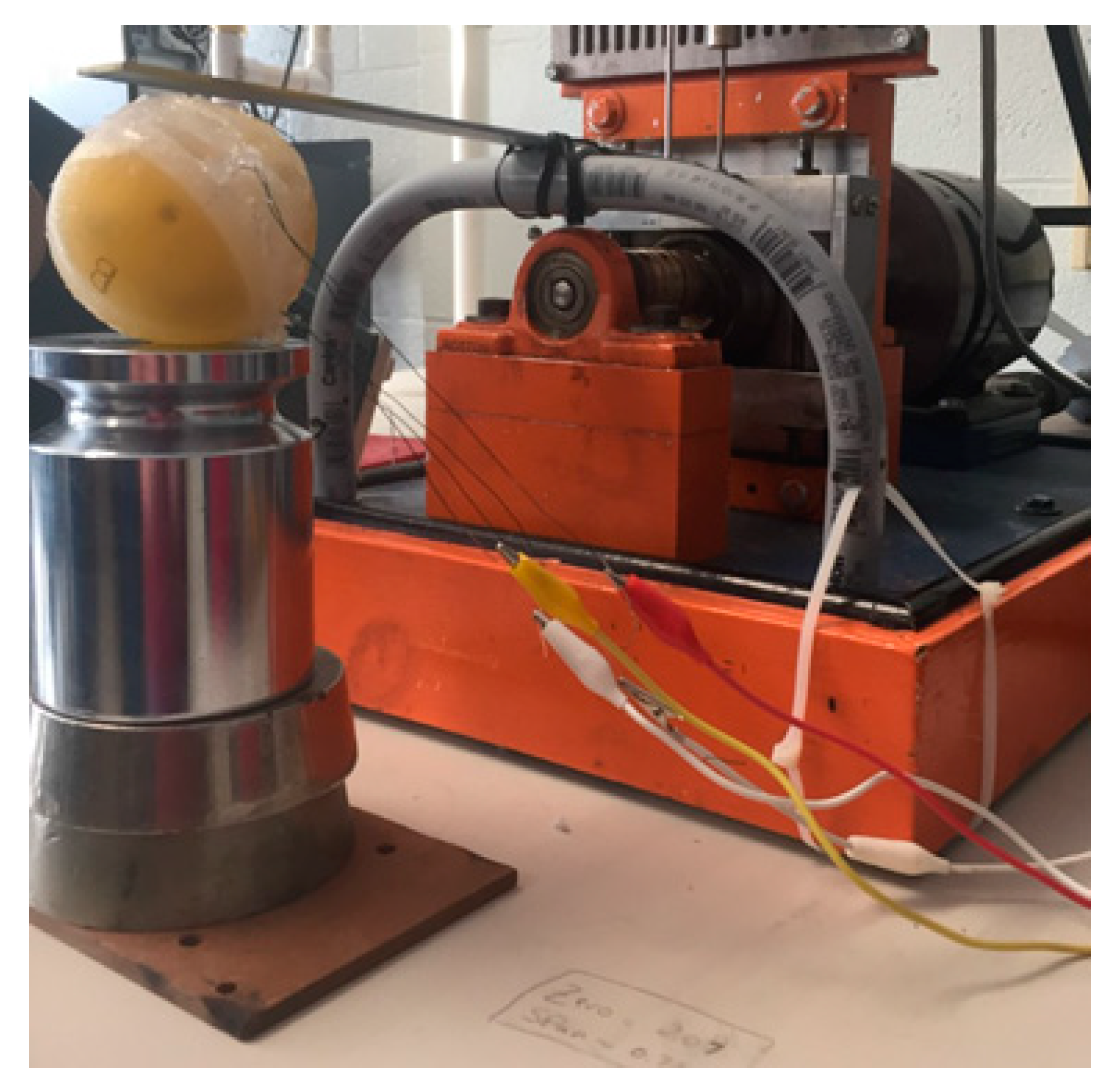
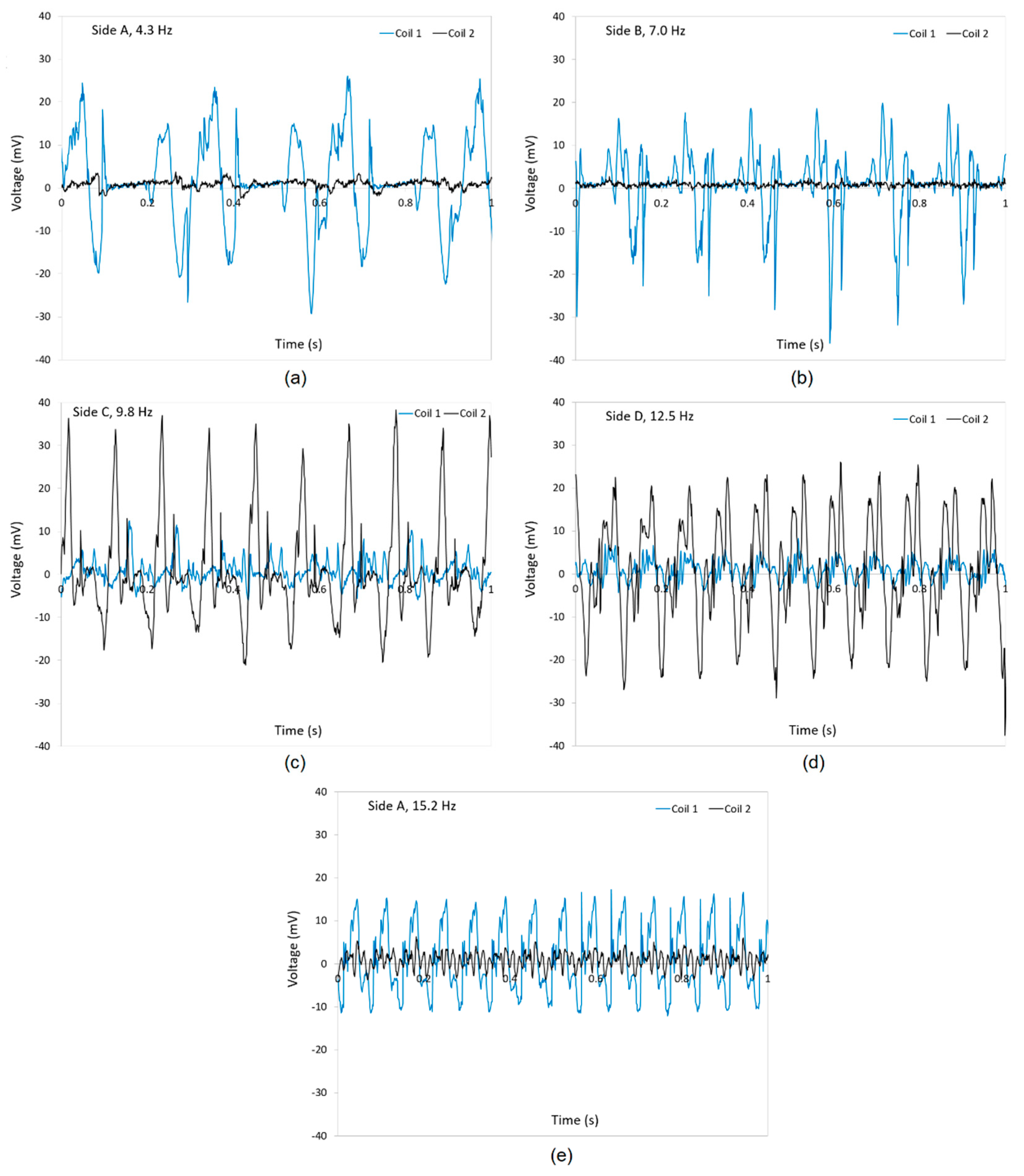
2.3. Measurement
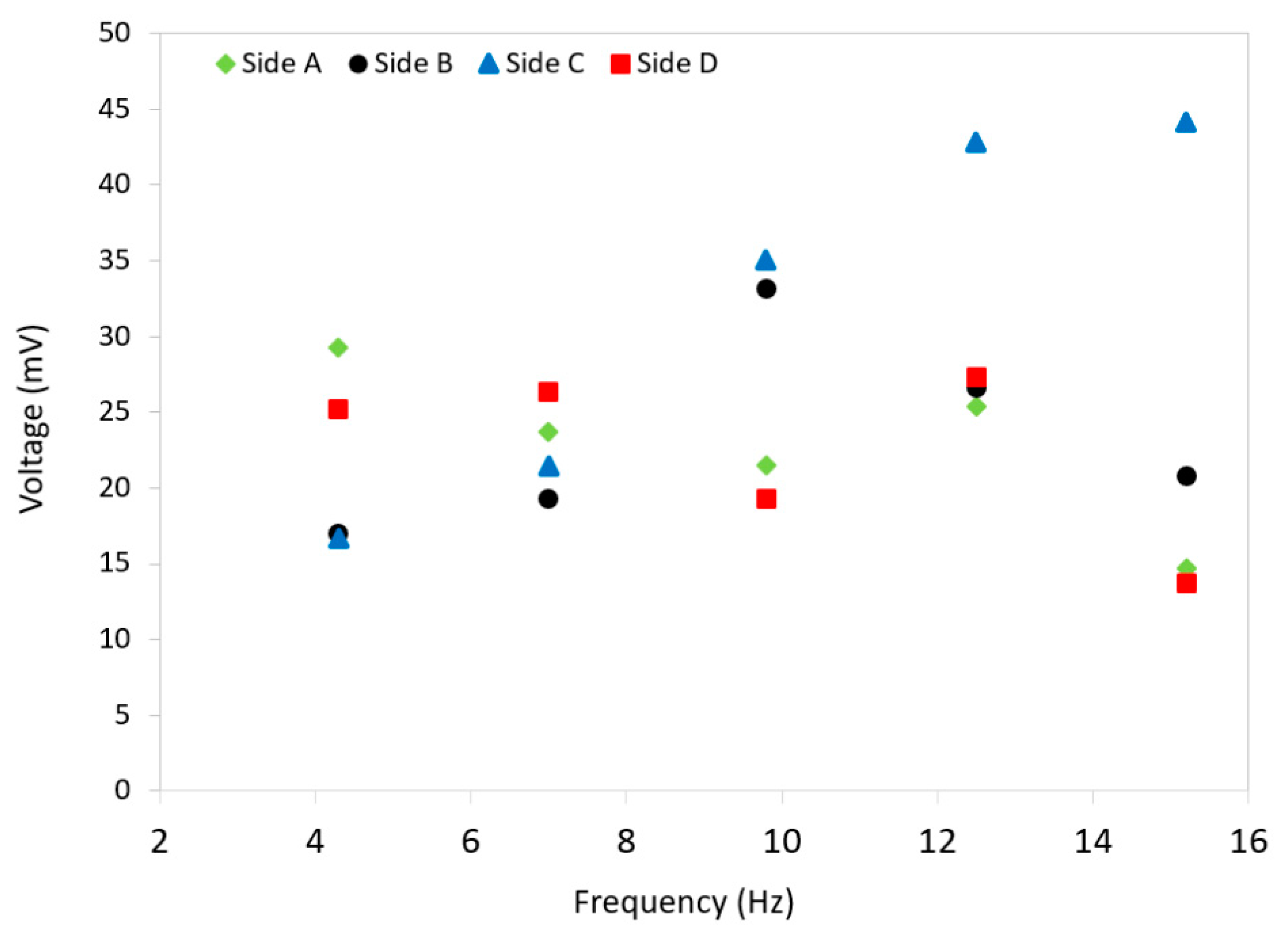
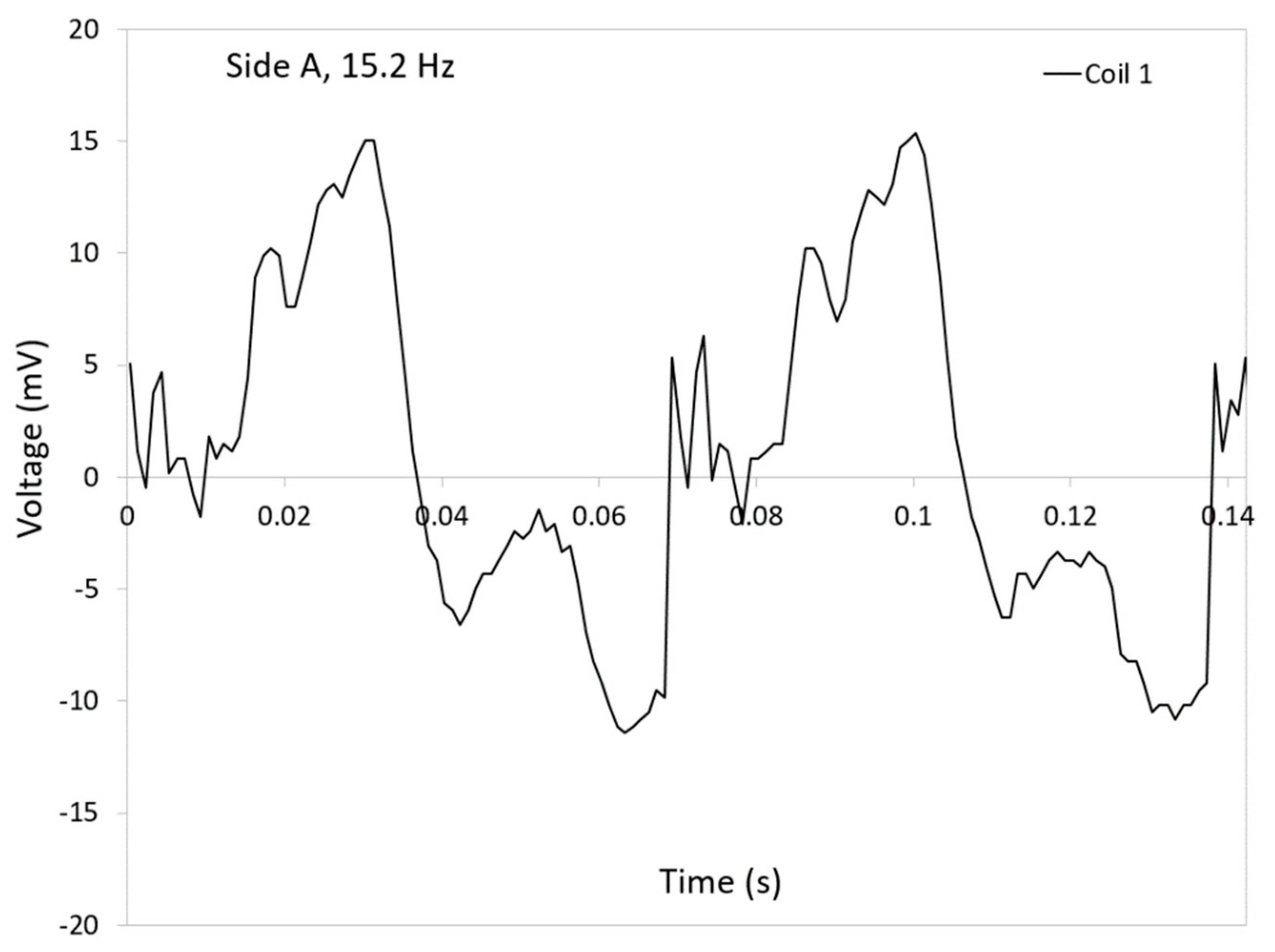
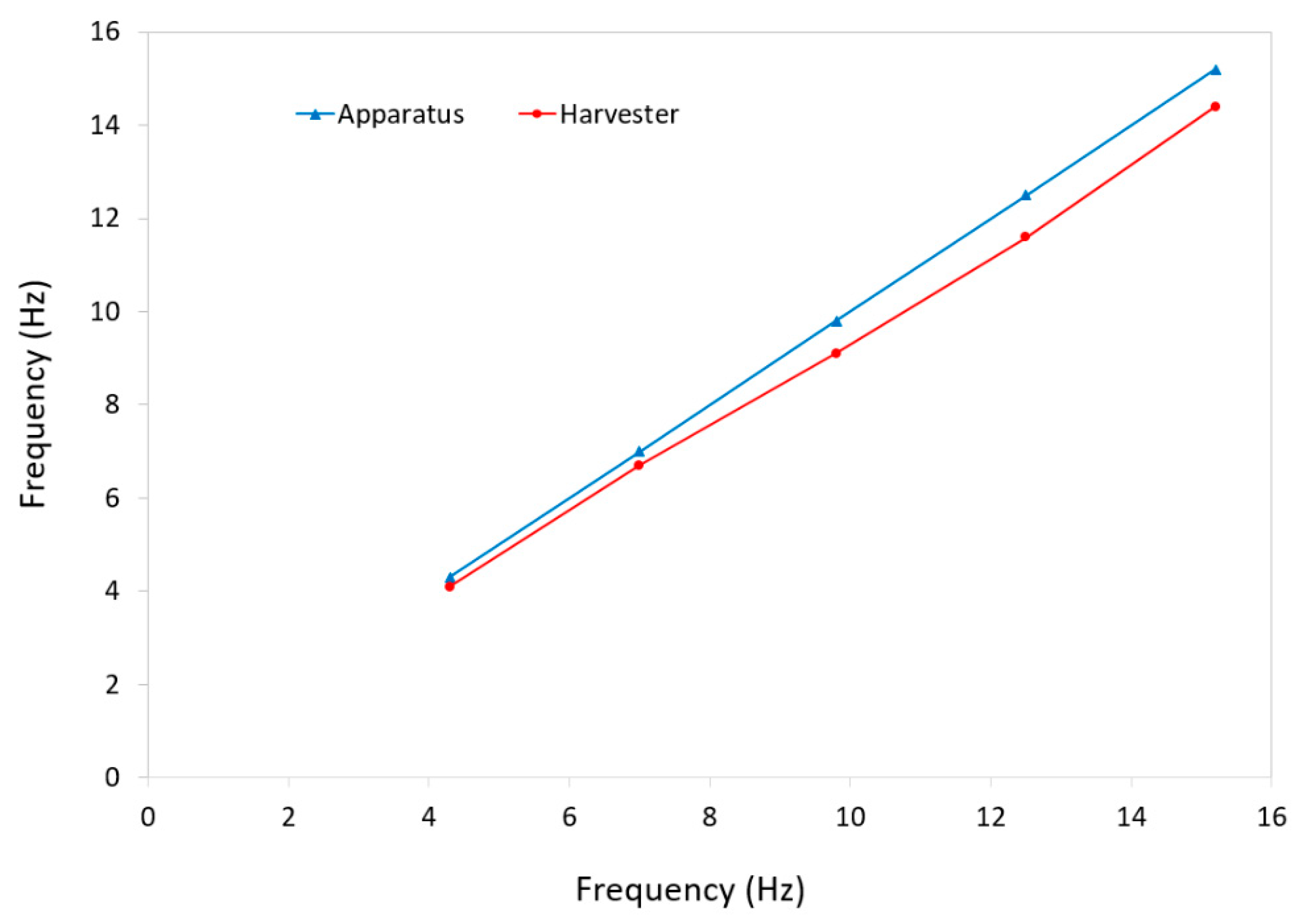
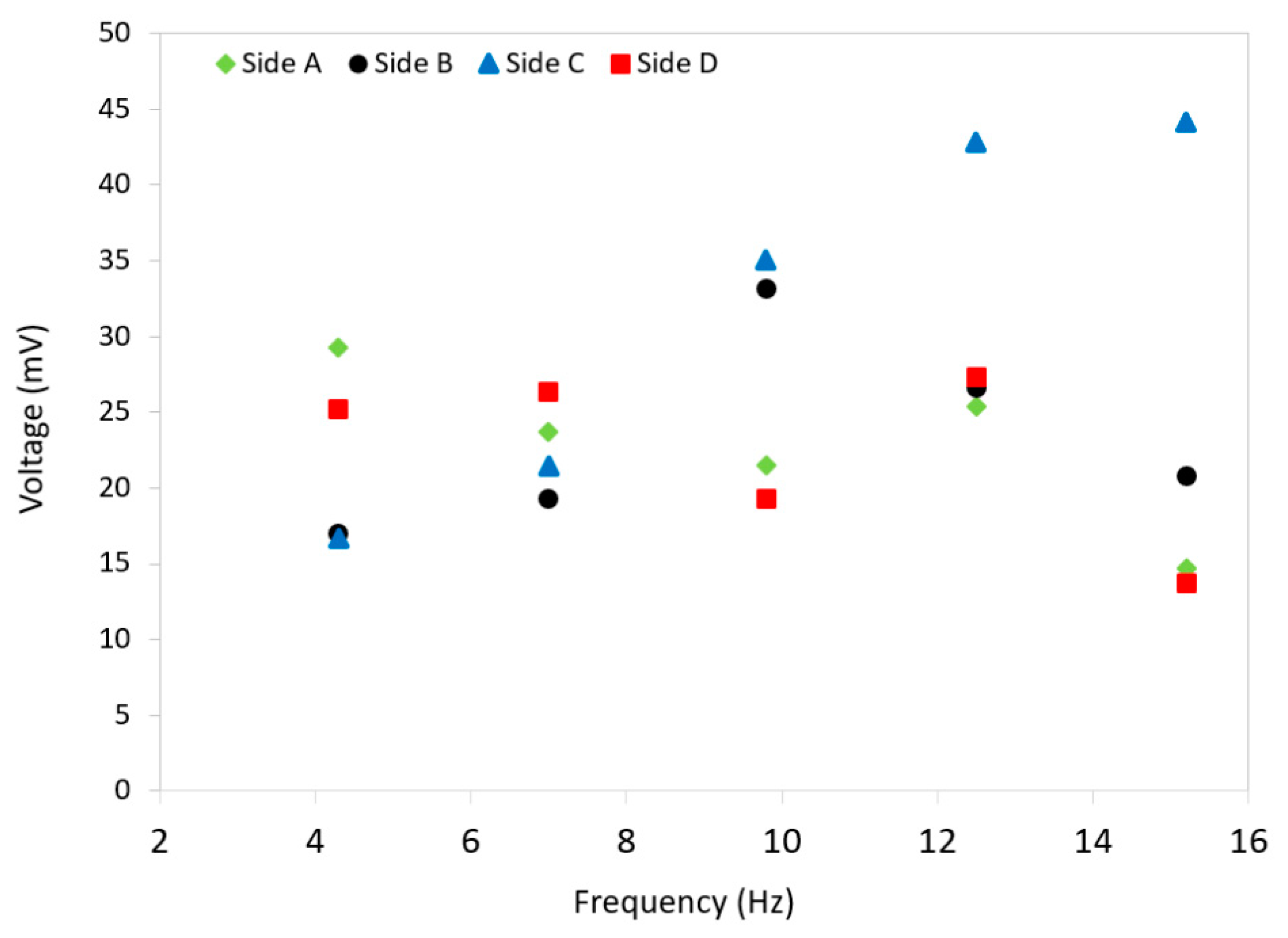
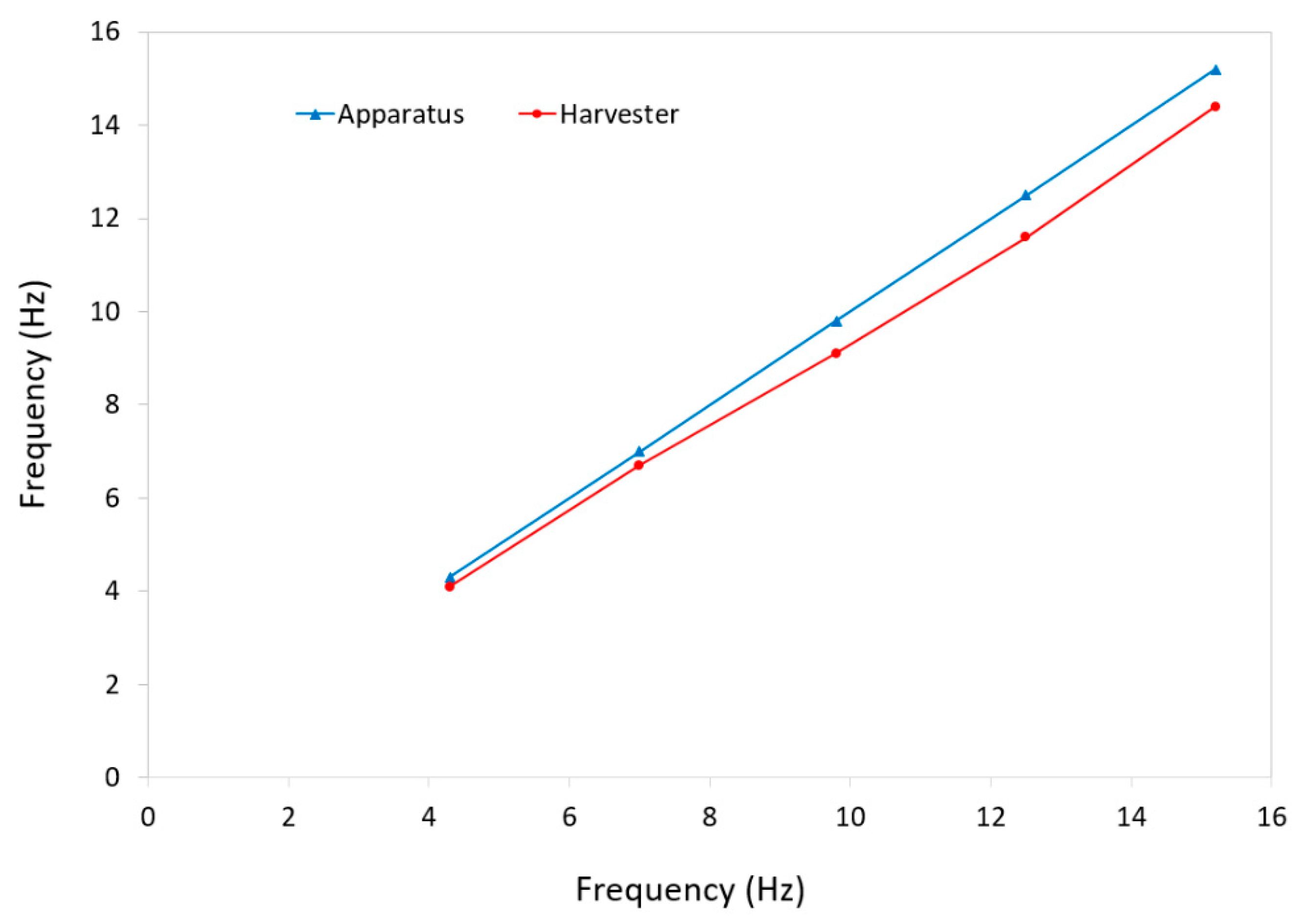
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chandrakasan, A.P.; Brodersen, R.W. Minimizing power consumption in digital CMOS circuits. Proc. IEEE 1995, 83, 498–523. [Google Scholar] [CrossRef] [Green Version]
- Kausar, A.Z.; Reza, A.W.; Saleh, M.U.; Ramiah, H. Energizing wireless sensor networks by energy harvesting systems: Scopes, challenges and approaches. Renew. Sustain. Energy Rev. 2014, 38, 973–989. [Google Scholar] [CrossRef]
- Shafer, M.W.; Morgan, E. Energy harvesting for marine-wildlife monitoring. In Proceedings of the ASME 2014 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Newport, Rhode, 8–10 September 2014. [Google Scholar]
- Gutiérrez, Á.; Dopico, N.I.; González, C.; Zazo, S.; Jiménez-Leube, J.; Raos, I. Cattle-powered node experience in a heterogeneous network for localization of herds. IEEE Trans. Ind. Electron. 2012, 60, 3176–3184. [Google Scholar] [CrossRef]
- Wu, S.; Luk, P.C.; Li, C.; Zhao, X.; Jiao, Z.; Shang, Y. An electromagnetic wearable 3-DoF resonance human body motion energy harvester using ferrofluid as a lubricant. Appl. Energy 2017, 197, 364–374. [Google Scholar] [CrossRef]
- Soulsby, K.S. Use of a Tri-Axial Accelerometer, Behavioral Observation, and GPS to Monitor the Activity of Female Asian Elephants in a Zoo. Master’s Thesis, The University of Texas at Arlington, Arlington, TX, USA, 2013. [Google Scholar]
- Abdullah, M.A.; Jamil, J.F. Harvesting energy from the vibration of suspension of a passenger vehicle. Recent Adv. Mech. Mech. Eng. 2015, 128–133. [Google Scholar]
- Torres, E.O.; Rincón-Mora, G.A. Electrostatic energy-harvesting and battery-charging CMOS system prototype. IEEE Trans. Circuits Syst. I Regul. Pap. 2008, 56, 1938–1948. [Google Scholar] [CrossRef]
- Hu, Y.; Xue, H.; Hu, T.; Hu, H. Nonlinear interface between the piezoelectric harvesting structure and the modulating circuit of an energy harvester with a real storage battery. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2008, 55, 148–160. [Google Scholar] [CrossRef]
- Zheng, H.; Zi, Y.; He, X.; Guo, H.; Lai, Y.C.; Wang, J.; Zhang, S.L.; Wu, C.; Cheng, G.; Wang, Z.L. Concurrent harvesting of ambient energy by hybrid nanogenerators for wearable self-powered systems and active remote sensing. ACS Appl. Mater. Interfaces 2018, 10, 14708–14715. [Google Scholar] [CrossRef]
- Alluri, N.R.; Selvarajan, S.; Chandrasekhar, A.; Saravanakumar, B.; Jeong, J.H.; Kim, S.J. Piezoelectric BaTiO3/alginate spherical composite beads for energy harvesting and self-powered wearable flexion sensor. Compos. Sci. Technol. 2017, 142, 65–78. [Google Scholar] [CrossRef]
- Kim, K.; Song, G.; Park, C.; Yun, K.S. Multifunctional woven structure operating as triboelectric energy harvester, capacitive tactile sensor array, and piezoresistive strain sensor array. Sensors 2017, 17, 2582. [Google Scholar] [CrossRef]
- Rasel, M.S.; Halim, M.A.; Park, J.Y. A PDMS Based Triboelectric Energy Harvester as Self-Powered, Active Tactile Sensor System for Human Skin. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1 November 2015; pp. 1–4. [Google Scholar]
- Shi, Q.; Wang, T.; Lee, C. MEMS based broadband piezoelectric ultrasonic energy harvester (PUEH) for enabling self-powered implantable biomedical devices. Sci. Rep. 2016, 6, 24946. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, Y.; Cottone, F.; Boisseau, S.; Marty, F.; Galayko, D.; Basset, P. A nonlinear MEMS electrostatic kinetic energy harvester for human-powered biomedical devices. Appl. Phys. Lett. 2015, 107, 253902. [Google Scholar] [CrossRef]
- Dinulovic, D.; Brooks, M.; Haug, M.; Petrovic, T. Rotational electromagnetic energy harvesting system. Phys. Procedia 2015, 75, 1244–1251. [Google Scholar] [CrossRef] [Green Version]
- Shang, S.; Yang, S.; Shan, M.; Liu, J.; Cao, H. High performance metamaterial device with enhanced electromagnetic energy harvesting efficiency. AIP Adv. 2017, 7, 105204. [Google Scholar] [CrossRef] [Green Version]
- Fu, H.; Yeatman, E.M. Comparison and scaling effects of Rotational micro-generators using electromagnetic and piezoelectric transduction. Energy Technol. 2018, 6, 2220–2231. [Google Scholar] [CrossRef]
- Yan, B.; Zhang, C.; Li, L. Magnetostrictive energy generator for harvesting the rotation of human knee joint. AIP Adv. 2018, 8, 056730. [Google Scholar] [CrossRef] [Green Version]
- Owens, B.A.; Mann, B.P. Linear and nonlinear electromagnetic coupling models in vibration-based energy harvesting. J. Sound Vib. 2012, 331, 922–937. [Google Scholar] [CrossRef]
- Cho, S.J.; Kim, J.H. Linear electromagnetic electric generator for harvesting vibration energy at frequencies more than 50 Hz. Adv. Mech. Eng. 2017, 9, 1687814017719001. [Google Scholar] [CrossRef]
- Liu, H.; Qian, Y.; Lee, C. A multi-frequency vibration-based MEMS electromagnetic energy harvesting device. Sens. Actuators A Phys. 2013, 204, 37–43. [Google Scholar] [CrossRef]
- Haroun, A.; Yamada, I. Study of electromagnetic vibration energy harvesting with free/impact motion for low frequency operation. J. Sound Vib. 2015, 349, 389–402. [Google Scholar] [CrossRef]
- Bhosale, A.; Anderson, A.; Deshmukh, P.S. Voltage enhancing using multi-magnetic arrangement for low frequency vibrational energy harvesting. J. Vibroeng. 2018, 20, 1720–1732. [Google Scholar] [CrossRef]
- Wang, D.A.; Chang, K.H. Electromagnetic energy harvesting from flow induced vibration. Microelectron. J. 2010, 41, 356–364. [Google Scholar] [CrossRef]
- Monroe, J.G.; Ibrahim, O.T.; Thompson, S.M.; Shamsaei, N. Energy harvesting via fluidic agitation of a magnet within an oscillating heat pipe. Appl. Therm. Eng. 2018, 129, 884–892. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, Y. Design, analysis, and evaluation of a compact electromagnetic energy harvester from water flow for remote sensors. Energies 2018, 11, 1424. [Google Scholar] [CrossRef] [Green Version]
- Bakhtiar, S.; Khan, F.U. Analytical Modeling and Simulation of an Electromagnetic Energy Harvester for Pulsating Fluid Flow in Pipeline. Sci. World J. 2019, 2019, 5682517. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liao, Y.; Sodano, H. Optimal power, power limit and damping of vibration based piezoelectric power harvesters. Smart Mater. Struct. 2018, 27, 075057. [Google Scholar] [CrossRef]
- Chen, N.; Jung, H.J.; Jabbar, H.; Sung, T.H.; Wei, T. A piezoelectric impact-induced vibration cantilever energy harvester from speed bump with a low-power power management circuit. Sens. Actuators A Phys. 2017, 254, 134–144. [Google Scholar] [CrossRef]
- Rashidi, R.; Summerville, N.; Nasri, M. Magnetically actuated piezoelectric-based rotational energy harvester with enhanced output in wide range of rotating speeds. IEEE Trans. Magn. 2019, 55, 1–8. [Google Scholar] [CrossRef]
- Ma, X.; Zhang, X. Low cost electrostatic vibration energy harvesters based on negatively-charged polypropylene cellular films with a folded structure. Smart Mater. Struct. 2017, 26, 085001. [Google Scholar] [CrossRef]
- Takhedmit, H.; Saddi, Z.; Karami, A.; Basset, P.; Cirio, L. Electrostatic vibration energy harvester with 2.4-GHz Cockcroft–Walton rectenna start-up. Comptes Rendus Phys. 2017, 18, 98–106. [Google Scholar] [CrossRef]
- Seol, M.L.; Jeon, S.B.; Han, J.W.; Choi, Y.K. Ferrofluid-based triboelectric-electromagnetic hybrid generator for sensitive and sustainable vibration energy harvesting. Nano Energy 2017, 31, 233–238. [Google Scholar] [CrossRef]
- Tan, Y.; Dong, Y.; Wang, X. Review of MEMS electromagnetic vibration energy harvester. J. Microelectromech. Syst. 2016, 26, 1–6. [Google Scholar] [CrossRef]
- Bianconi, J.; Hallett, J.; Pealo, J.; Rashidi, R. A hybrid piezoelectric and inductive rotational energy harvester. In Proceedings of the IOP Conference Series: Materials Science and Engineering, 6th International Conference on Mechanics and Mechatronics Research (ICMMR 2019), Chongqing, China, 18–21 July 2019; Volume 626, p. 012004. [Google Scholar]
- He, J.; Wen, T.; Qian, S.; Zhang, Z.; Tian, Z.; Zhu, J.; Mu, J.; Hou, X.; Geng, W.; Cho, J.; et al. Triboelectric-piezoelectric-electromagnetic hybrid nanogenerator for high-efficient vibration energy harvesting and self-powered wireless monitoring system. Nano Energy 2018, 43, 326–339. [Google Scholar] [CrossRef]
- Choi, A.Y.; Lee, C.J.; Park, J.; Kim, D.; Kim, Y.T. Corrugated textile based triboelectric generator for wearable energy harvesting. Sci. Rep. 2017, 7, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Hobbs, W.B.; Hu, D.L. Tree-inspired piezoelectric energy harvesting. J. Fluids Struct. 2012, 28, 103–114. [Google Scholar] [CrossRef]
- Zou, H.; Chen, H.; Zhu, X. Piezoelectric energy harvesting from vibrations induced by jet-resonator system. Mechatronics 2015, 26, 29–35. [Google Scholar] [CrossRef]
- Zhang, Z.; Xiang, H.; Shi, Z.; Zhan, J. Experimental investigation on piezoelectric energy harvesting from vehicle-bridge coupling vibration. Energy Convers. Manag. 2018, 163, 169–179. [Google Scholar] [CrossRef]
- Dagdeviren, C.; Yang, B.D.; Su, Y.; Tran, P.L.; Joe, P.; Anderson, E.; Xia, J.; Doraiswamy, V.; Dehdashti, B.; Feng, X.; et al. Conformal piezoelectric energy harvesting and storage from motions of the heart, lung, and diaphragm. Proc. Natl. Acad. Sci. USA 2014, 111, 1927–1932. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guido, F.; Qualtieri, A.; Algieri, L.; Lemma, E.D.; De Vittorio, M.; Todaro, M.T. AlN-based flexible piezoelectric skin for energy harvesting from human motion. Microelectron. Eng. 2016, 159, 174–178. [Google Scholar] [CrossRef]
- Stamatellou, A.M.; Kalfas, A.I. Experimental investigation of energy harvesting from swirling flows using a piezoelectric film transducer. Energy Convers. Manag. 2018, 171, 1405–1415. [Google Scholar] [CrossRef]
- Wang, F.; Hansen, O. Electrostatic energy harvesting device with out-of-the-plane gap closing scheme. Sens. Actuators A Phys. 2014, 211, 131–137. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, T.; Luo, A.; Hu, Y.; Li, X.; Wang, F. Micro electrostatic energy harvester with both broad bandwidth and high normalized power density. Appl. Energy 2018, 212, 362–371. [Google Scholar] [CrossRef]
- Fan, F.R.; Tian, Z.Q.; Wang, Z.L. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Seol, M.L.; Woo, J.H.; Jeon, S.B.; Kim, D.; Park, S.J.; Hur, J.; Choi, Y.K. Vertically stacked thin triboelectric nanogenerator for wind energy harvesting. Nano Energy 2015, 14, 201–208. [Google Scholar] [CrossRef]
- Foisal, A.R.; Hong, C.; Chung, G.S. Multi-frequency electromagnetic energy harvester using a magnetic spring cantilever. Sens. Actuators A Phys. 2012, 182, 106–113. [Google Scholar] [CrossRef]
- Kwon, S.D.; Park, J.; Law, K. Electromagnetic energy harvester with repulsively stacked multilayer magnets for low frequency vibrations. Smart Mater. Struct. 2013, 22, 055007. [Google Scholar] [CrossRef] [Green Version]
- Martin, J.; Rashidi, R. A differential transformer-based force sensor utilizing a magnetic fluid core. Microsyst. Technol. 2021, 27, 115–126. [Google Scholar] [CrossRef]
- Coughlin, T.; Rashidi, R. A powerless iron oxide based magnetometer. Microsyst. Technol. 2020, 22, 1–2. [Google Scholar] [CrossRef]
- DeGraff, A.; Rashidi, R. Ferrofluid transformer-based tilt sensor. Microsyst. Technol. 2020, 21, 1–8. [Google Scholar] [CrossRef]
- Cooke, I.; DeClerck, B.; Hallett, J.; Miller, T.; Mitchell, A.; Rashidi, R. A Magnetic and Shape Memory Alloy Actuated Gripper for Surgical Applications. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Salt Lake City, UT, USA, 11 November 2019; Volume 59414, p. V004T05A035. [Google Scholar]
- Michelson, T.; Rudnick, J.; Baxter, J.; Rashidi, R. A novel ferrofluid-based valve-less pump. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Salt Lake City, UT, USA, 11 November 2019; Volume 59445, p. V007T08A009. [Google Scholar]
- Rashidi, R.; Summerville, N.C.; Nasri, M. A Dual-Purpose Piezoelectric Multi-Beam Energy Harvesting and Frequency Measurement Device for Rotational Applications. In Proceedings of the 2018 IEEE MIT Undergraduate Research Technology Conference (URTC), Cambridge, MA, USA, 5 October 2018; pp. 1–4. [Google Scholar]
- Li, M.; Deng, H.; Zhang, Y.; Li, K.; Huang, S.; Liu, X. Ultra-low frequency eccentric pendulum-based electromagnetic vibrational energy harvester. Micromachines 2020, 11, 1009. [Google Scholar] [CrossRef]
- Xu, Z.; Shan, X.; Yang, H.; Wang, W.; Xie, T. Parametric analysis and experimental verification of a hybrid vibration energy harvester combining piezoelectric and electromagnetic mechanisms. Micromachines 2017, 8, 189. [Google Scholar] [CrossRef]
- Aouali, K.; Kacem, N.; Bouhaddi, N.; Mrabet, E.; Haddar, M. Efficient broadband vibration energy harvesting based on tuned non-linearity and energy localization. Smart Mater. Struct. 2020, 29, 10LT01. [Google Scholar] [CrossRef]
- Mann, B.P.; Sims, N.D. On the performance and resonant frequency of electromagnetic induction energy harvesters. J. Sound Vib. 2010, 329, 1348–1361. [Google Scholar] [CrossRef] [Green Version]
- Zergoune, Z.; Kacem, N.; Bouhaddi, N. On the energy localization in weakly coupled oscillators for electromagnetic vibration energy harvesting. Smart Mater. Struct. 2019, 28, 07LT02. [Google Scholar] [CrossRef] [Green Version]
- Mann, B.P.; Sims, N.D. Energy harvesting from the nonlinear oscillations of magnetic levitation. J. Sound Vib. 2009, 319, 515–530. [Google Scholar] [CrossRef] [Green Version]
- Halim, M.A.; Cho, H.; Park, J.Y. Design and experiment of a human-limb driven, frequency up-converted electromagnetic energy harvester. Energy Convers. Manag. 2015, 106, 393–404. [Google Scholar] [CrossRef]
- Halim, M.A.; Park, J.Y. Modeling and experiment of a handy motion driven, frequency up-converting electromagnetic energy harvester using transverse impact by spherical ball. Sens. Actuators A Phys. 2015, 229, 50–58. [Google Scholar] [CrossRef]
- Halim, M.A.; Cho, H.; Salauddin, M.; Park, J.Y. A miniaturized electromagnetic vibration energy harvester using flux-guided magnet stacks for human-body-induced motion. Sens. Actuators A Phys. 2016, 249, 23–31. [Google Scholar] [CrossRef]
- Gu, Y.; Liu, W.; Zhao, C.; Wang, P. A goblet-like non-linear electromagnetic generator for planar multi-directional vibration energy harvesting. Appl. Energy 2020, 266, 114846. [Google Scholar] [CrossRef]
- Rao, Y.; McEachern, K.M.; Arnold, D.P. A compact human-powered energy harvesting system. Energy Harvest. Syst. 2014, 1, 89–100. [Google Scholar] [CrossRef]
- Richelli, A.; Colalongo, L.; Kovàcs-Vajna, Z. A 30 mV–2.5 V DC/DC converter for energy harvesting. J. Low Power Electron. 2015, 11, 190–195. [Google Scholar] [CrossRef]
- Rodriguez, A.S.; Garraud, N.; Alabi, D.; Garraud, A.; Arnold, D.P. A simple passive 390 mV ac/dc rectifier for energy harvesting applications. J. Phys. Conf. Ser. 2019, 1407, 012018. [Google Scholar] [CrossRef]
- Caselli, M.; Ronchi, M.; Boni, A. Power Management Circuits for Low-Power RF Energy Harvesters. J. Low Power Electron. Appl. 2020, 10, 29. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Excitation Frequency | Periodic Time Experimentally Measured | Response Frequency Calculated from Periodic Time | Frequency Deviation |
|---|---|---|---|
| 4.3 Hz | 244 ms | 4.1 Hz | 4.7% |
| 7.0 Hz | 149 ms | 6.7 Hz | 4.3% |
| 9.8 Hz | 110 ms | 9.1 Hz | 7.1% |
| 12.5 Hz | 86 ms | 11.6 Hz | 7.2% |
| 15.2 Hz | 69 ms | 14.4 Hz | 5.3% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hall, R.G.; Rashidi, R. Multi-Directional Universal Energy Harvesting Ball. Micromachines 2021, 12, 457. https://doi.org/10.3390/mi12040457
Hall RG, Rashidi R. Multi-Directional Universal Energy Harvesting Ball. Micromachines. 2021; 12(4):457. https://doi.org/10.3390/mi12040457
Chicago/Turabian StyleHall, Ryan G., and Reza Rashidi. 2021. "Multi-Directional Universal Energy Harvesting Ball" Micromachines 12, no. 4: 457. https://doi.org/10.3390/mi12040457
APA StyleHall, R. G., & Rashidi, R. (2021). Multi-Directional Universal Energy Harvesting Ball. Micromachines, 12(4), 457. https://doi.org/10.3390/mi12040457