
A Direct-Writing Approach for Fabrication of CNT/Paper-Based Piezoresistive Pressure Sensors for Airflow Sensing


Abstract
:1. Introduction
2. Methodology
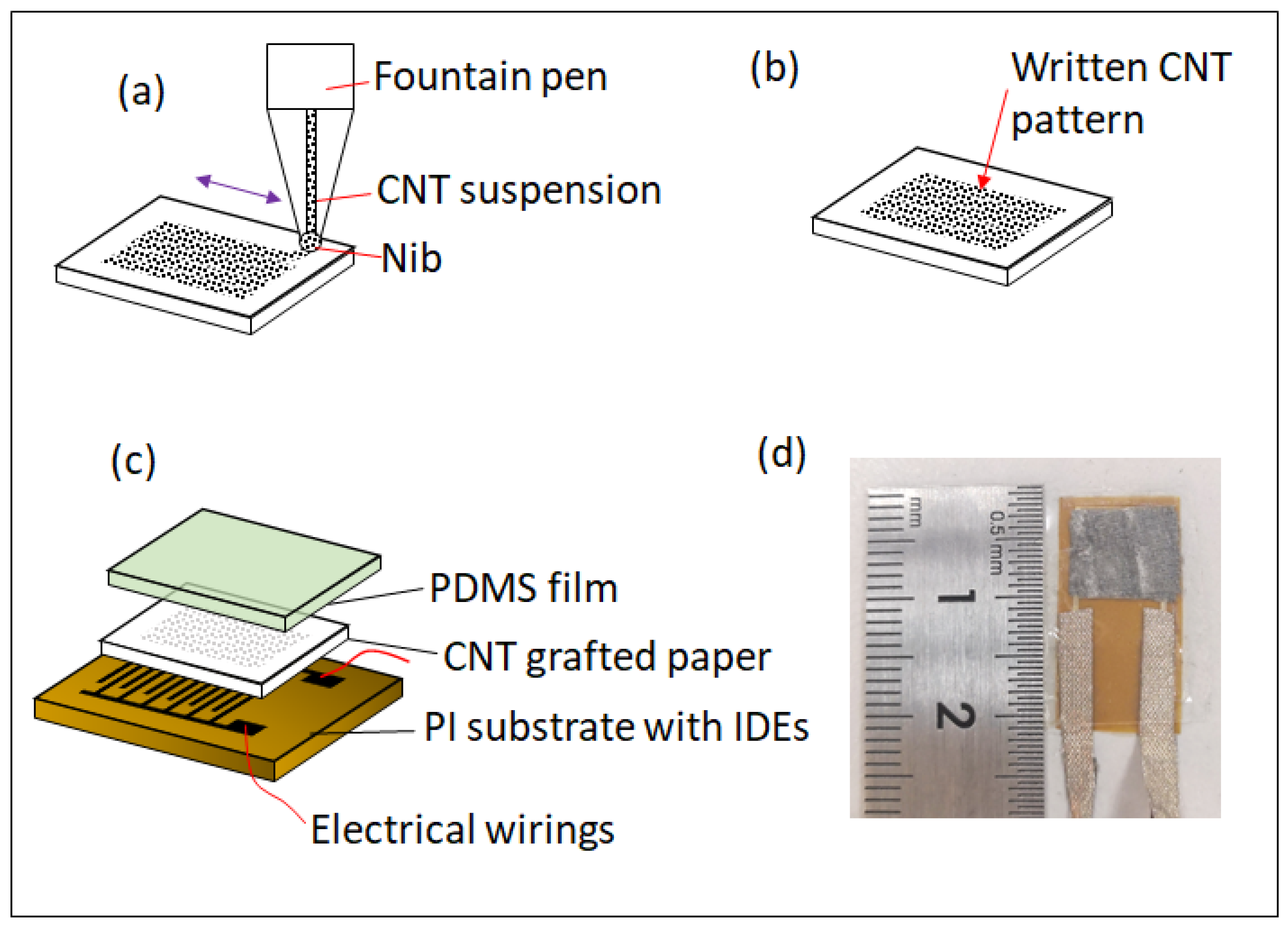
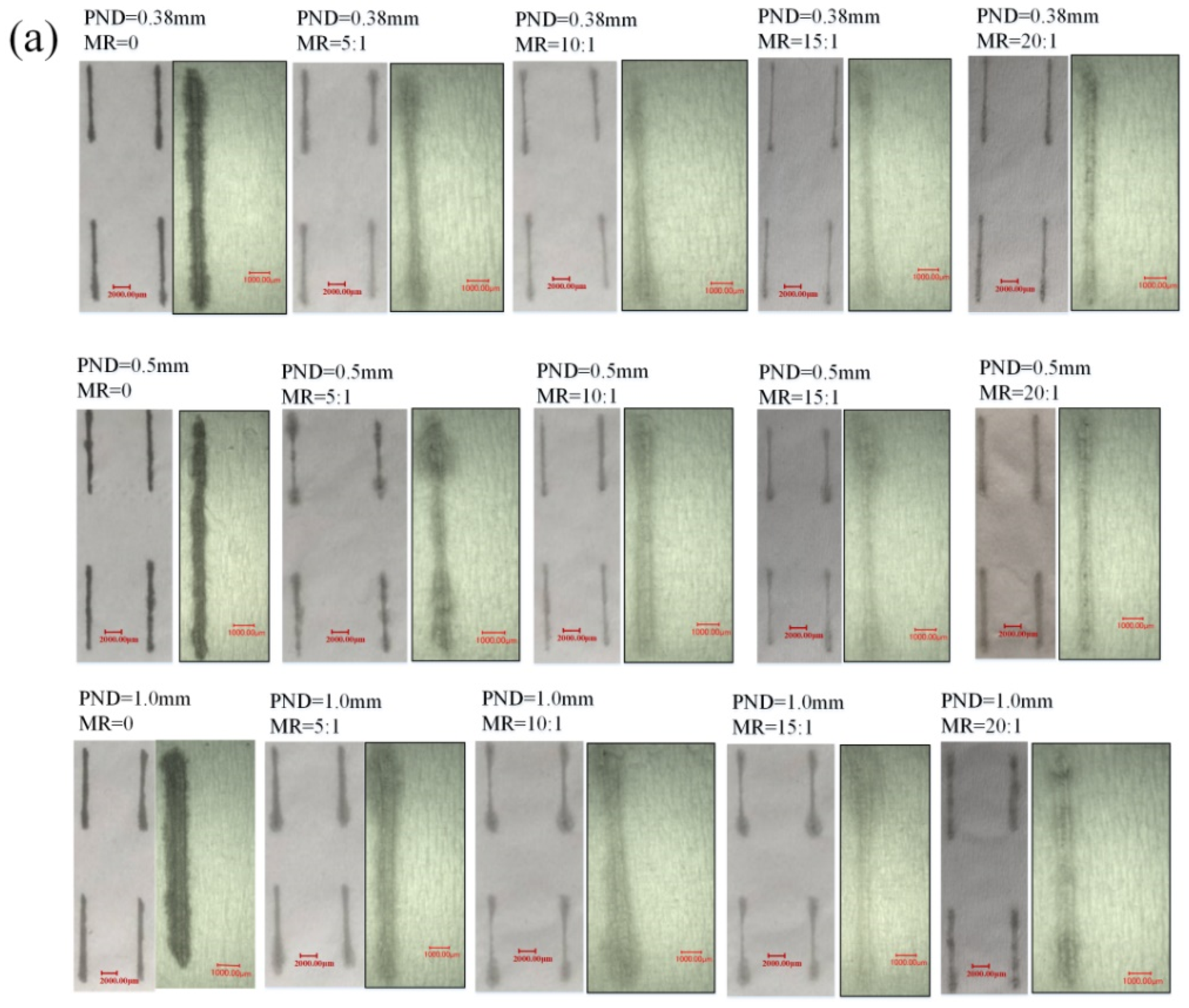
2.1. Fabrication of the Piezoresistive Elements
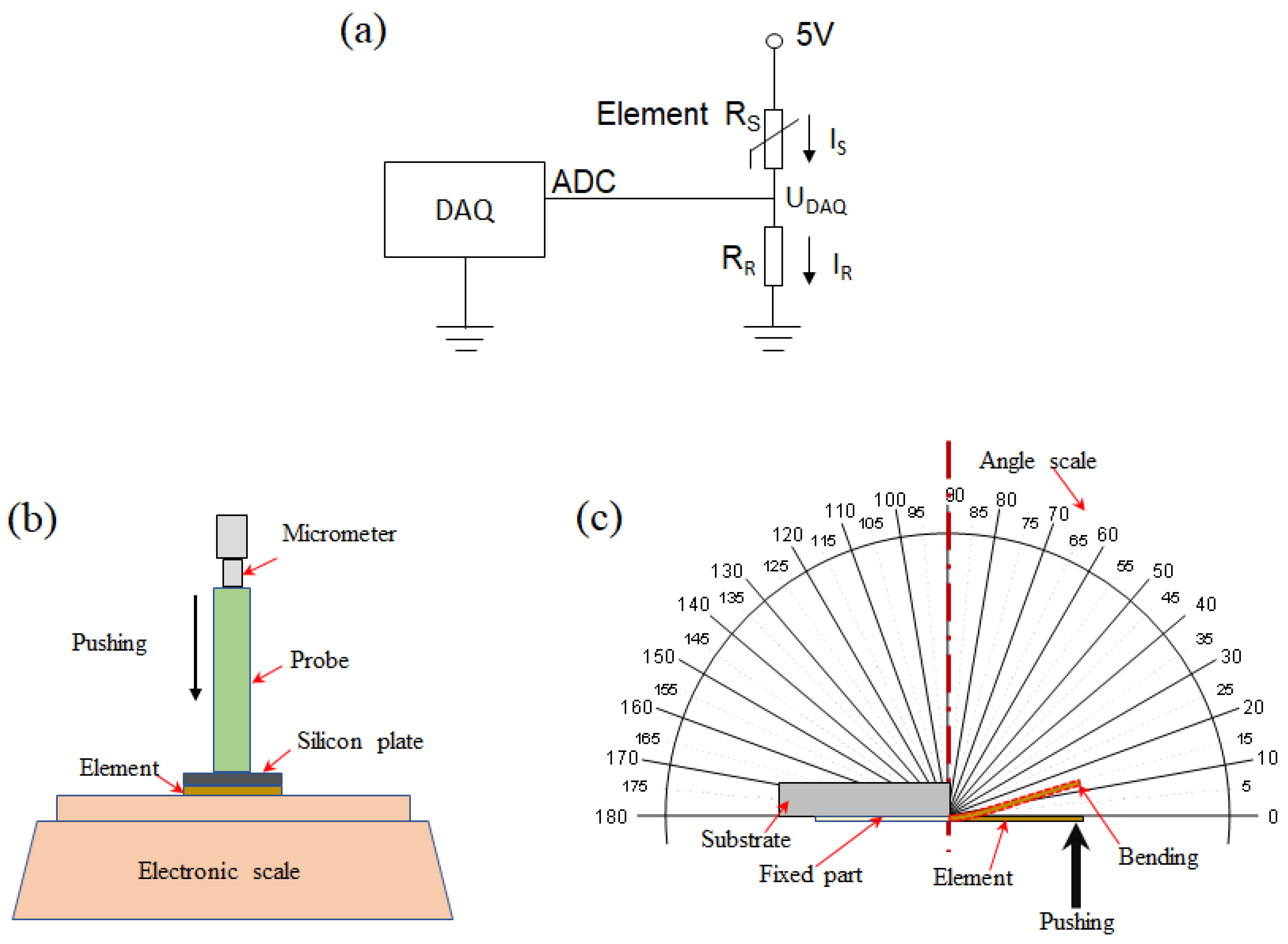
2.2. Measurement and Characterization
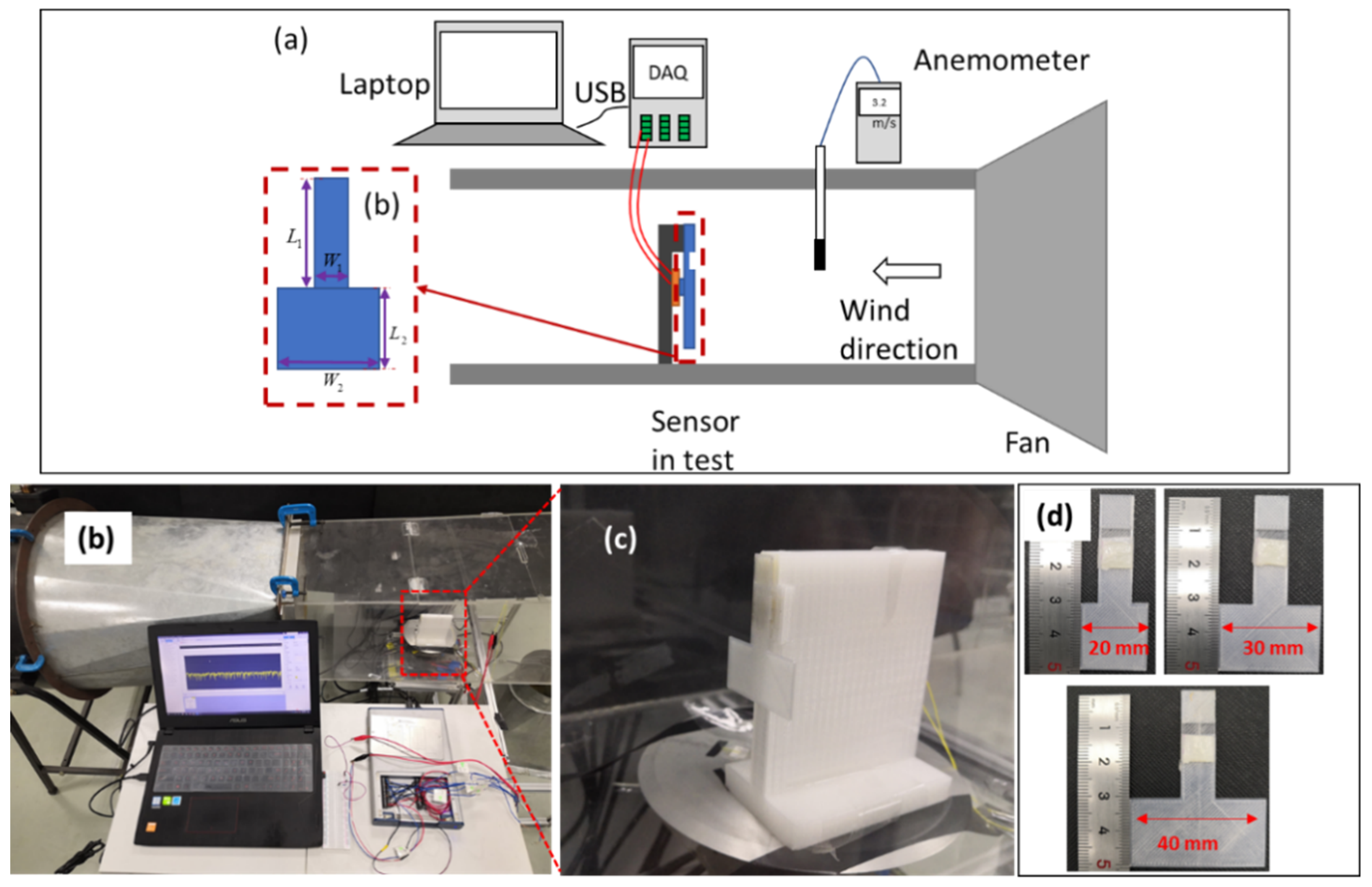
2.3. Experimental Setup for Airflow Sensing
3. Characteristics and Discussion
3.1. Electromechanical Properties of the Piezoresistive Element under Two Loading Modes
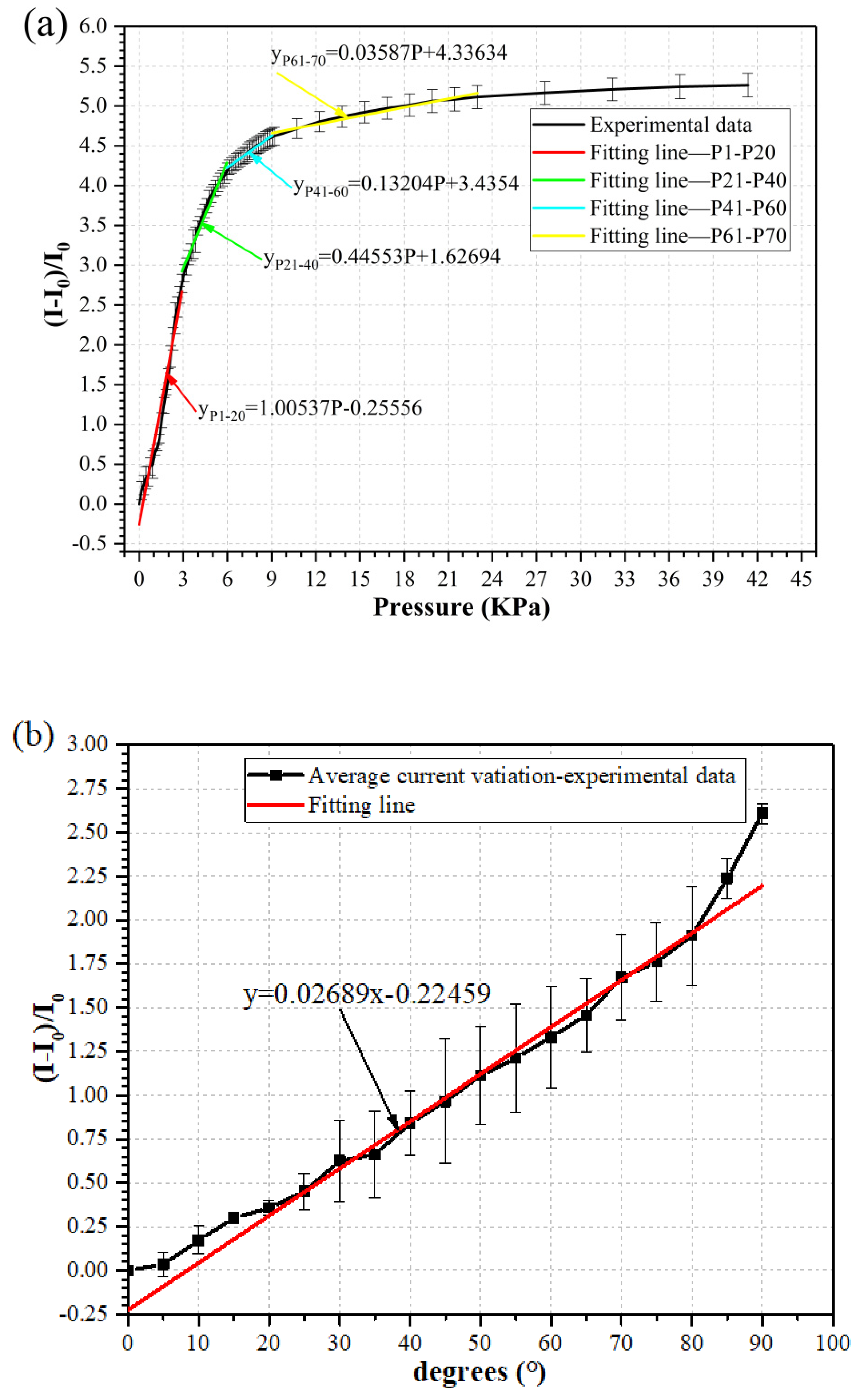
3.1.1. Pressure Mode
3.1.2. Bending Mode
3.1.3. Comparing the Two Modes
3.2. Airflow Sensing Characteristics
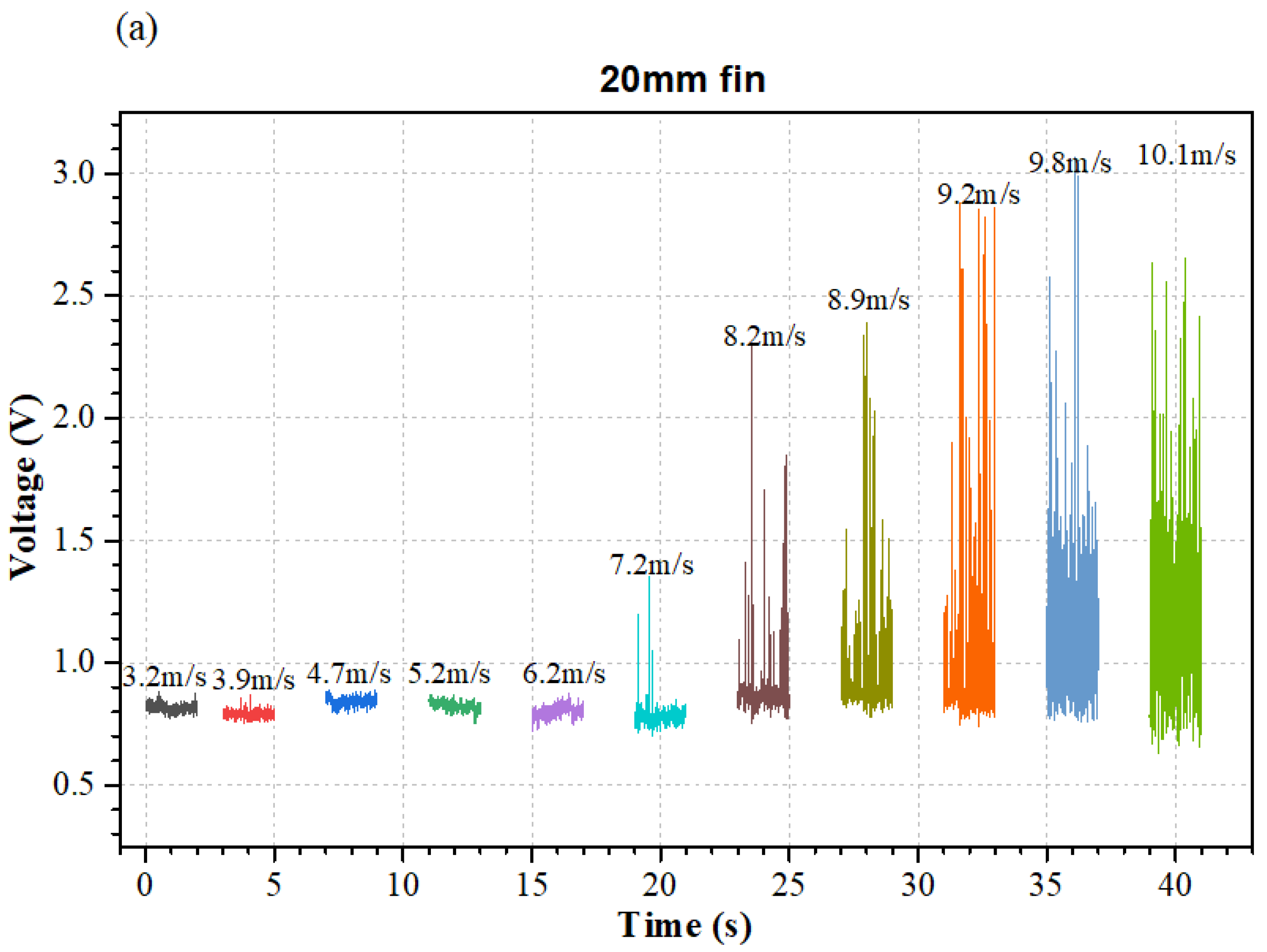
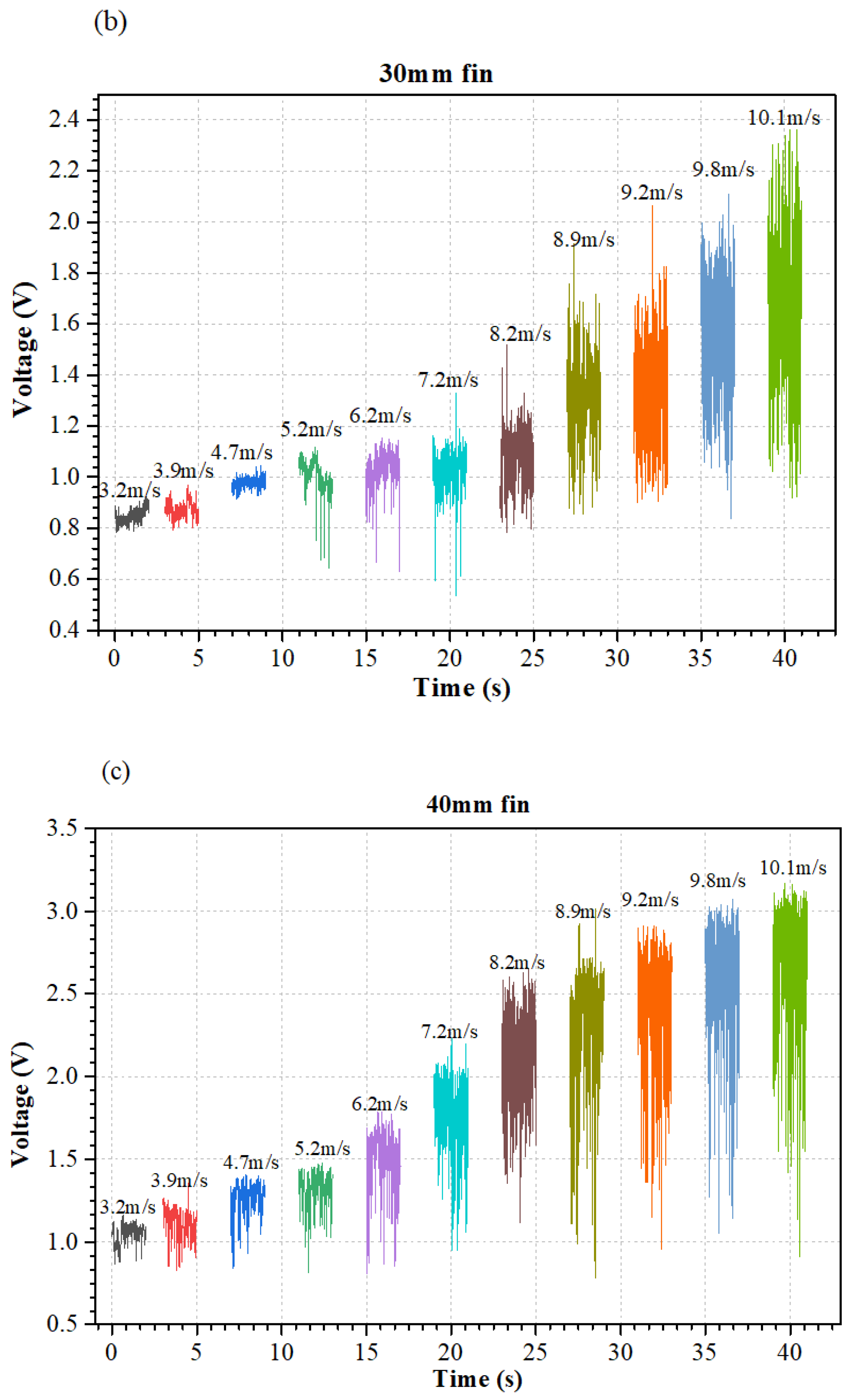
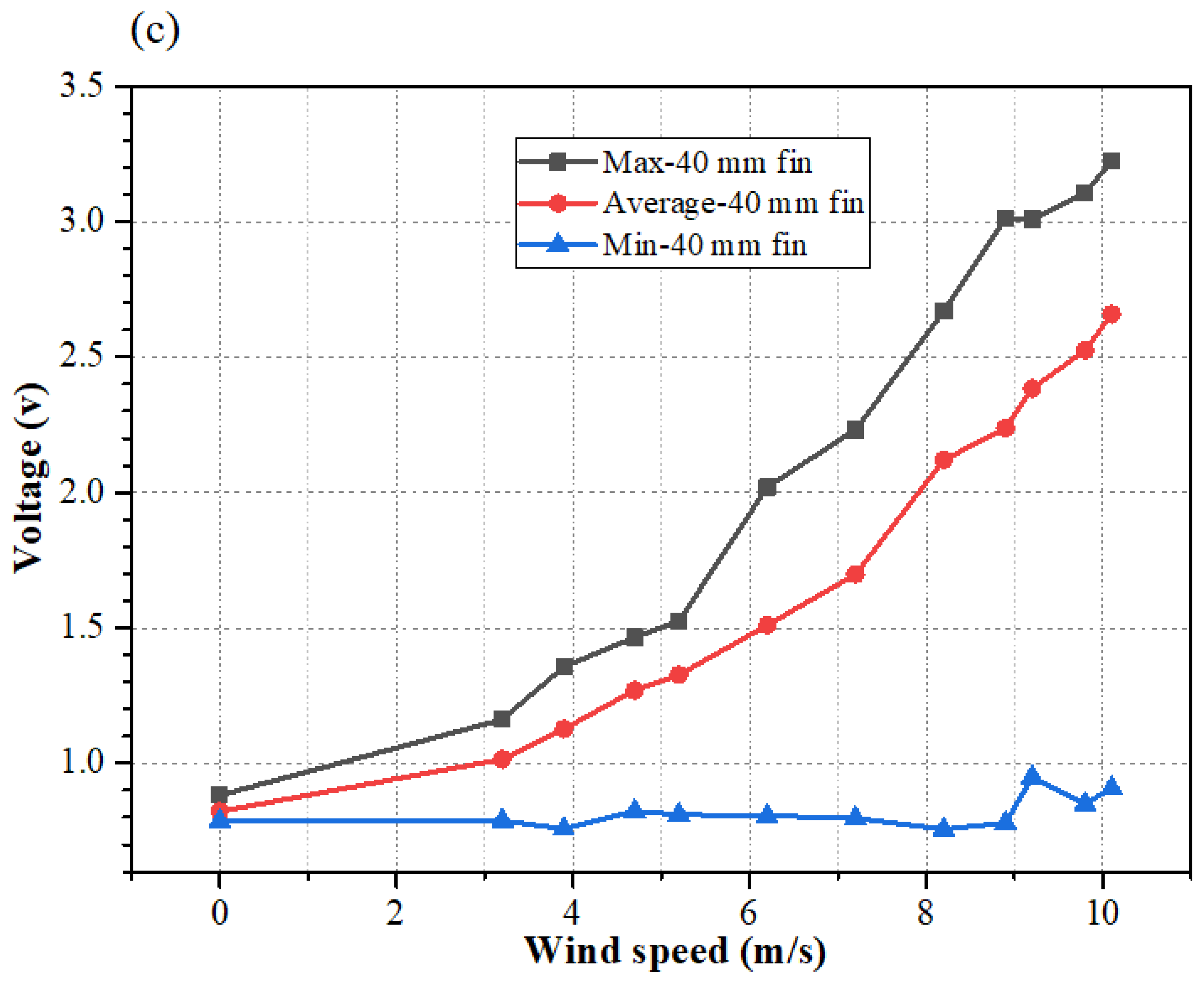
3.2.1. Raw Data and Signal Processing Method
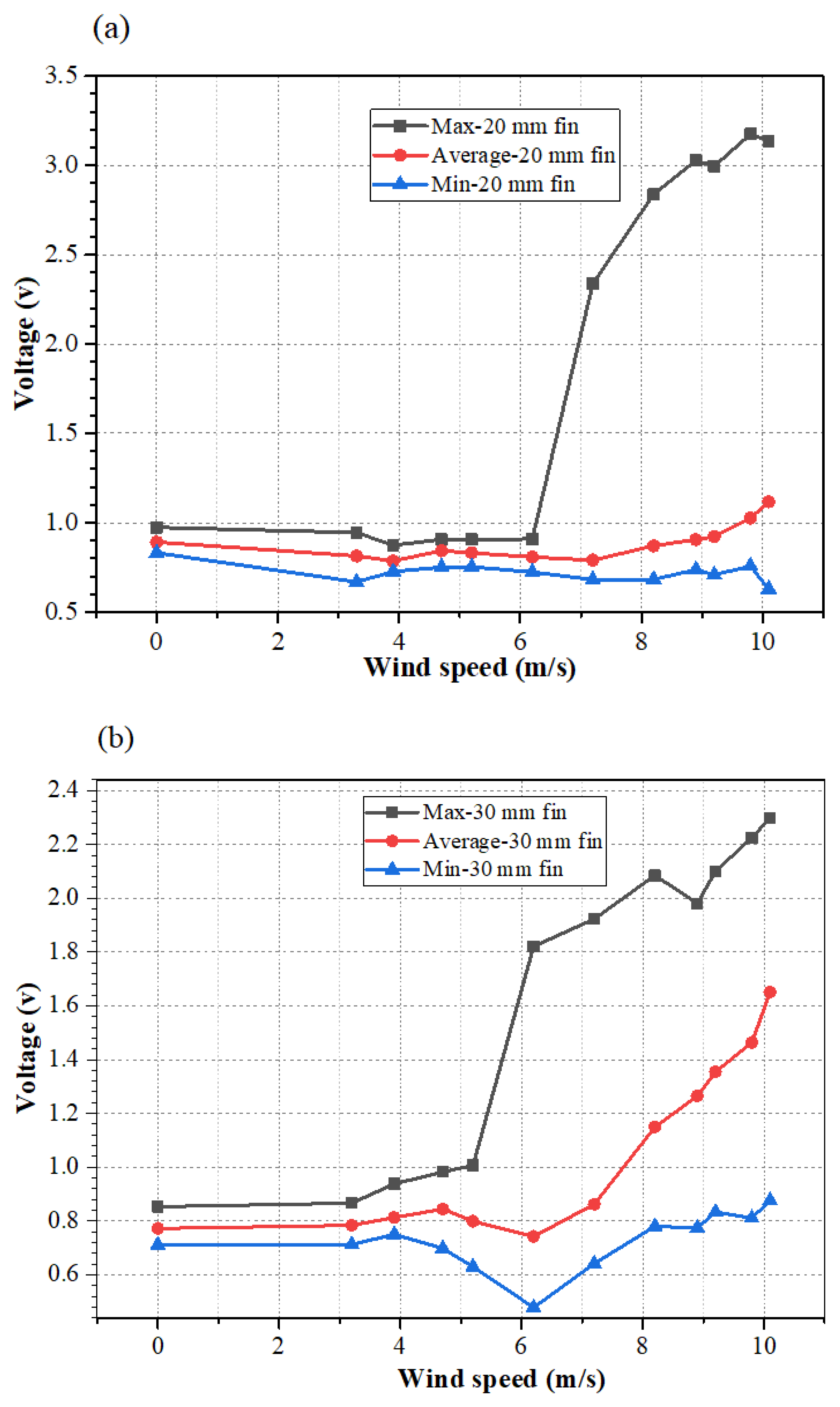
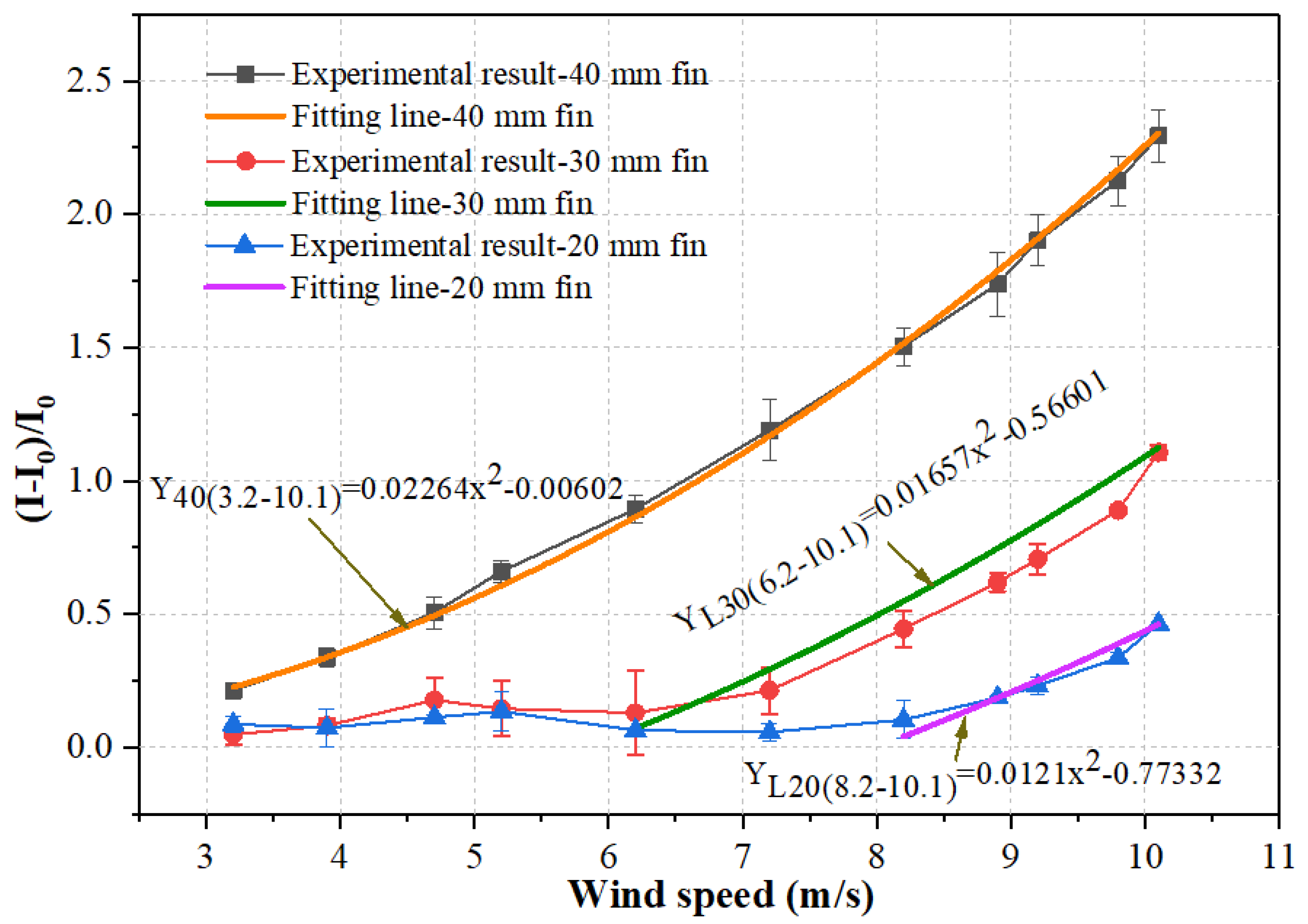
3.2.2. Curve Fitting
3.2.3. Detection Limit
3.2.4. Sensitivity
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hu, J.; Peng, H.; Mao, T.; Liu, T.; Guo, M.; Lu, P.; Bai, Y.; Zhao, C. An airflow sensor array based on polyvinylidene fluoride cantilevers for synchronously measuring airflow direction and velocity. Flow Meas. Instrum. 2019, 67, 166–175. [Google Scholar] [CrossRef]
- Shen, H.; Xu, Y.; Remeikas, C. Pitch control of a micro air vehicle with micropressure sensors. J. Aircr. 2012, 50, 239–248. [Google Scholar] [CrossRef]
- Sundin, J.; Kokmanian, K.; Fu, M.K.; Bagheri, S.; Hultmark, M. A Soft Material Flow Sensor for Micro Air Vehicles. Soft Robot. 2020. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mark, A.; Xu, Y.; Dickinson, B.T. Review of Microscale Flow-Sensor-Enabled Mechanosensing in Small Unmanned Aerial Vehicles. J. Aircr. 2019, 56, 962–973. [Google Scholar] [CrossRef]
- McNeely, R.L.; Iyer, R.V.; Chandler, P.R. Tour planning for an unmanned air vehicle under wind conditions. J. Guid. Control. Dyn. 2007, 30, 1299–1306. [Google Scholar] [CrossRef]
- Chan, W.L.; Lee, C.S.; Hsiao, F.B. Real-time approaches to the estimation of local wind velocity for a fixed-wing unmanned air vehicle. Meas. Sci. Technol. 2011, 22, 105203. [Google Scholar] [CrossRef]
- Pachter, M.; Ceccarelli, N.; Chandler, P. Estimating MAV’s Heading and the Wind Speed and Direction Using GPS, Inertial, and Air Speed Measurements. In AIAA Guidance, Navigation and Control Conference and Exhibit; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2008. [Google Scholar] [CrossRef]
- Makinwa, K.A.A.; Huijsing, J.H. A wind-sensor interface using thermal sigma delta modulation techniques. Sens. Actuators A 2001, 92, 280–285. [Google Scholar] [CrossRef]
- Jiang, J.-J.; Dang, W.-J.; Duan, F.-J.; Wang, X.-Q.; Fu, X.; Li, C.-Y.; Sun, Z.-B.; Liu, H.; Bu, L.-R. An accurate ultrasonic wind speed and direction measuring method by combining time-difference and phase-difference measurement using coded pulses combination. Appl. Acoust. 2020, 159, 107093. [Google Scholar] [CrossRef]
- Sumorek, A.; Jamińska-Gadomska, P.; Lipecki, T. Influence of Ultrasonic Wind Sensor Position on Measurement Accuracy under Full-Scale Conditions. Sensors 2020, 20, 5640. [Google Scholar]
- Franzini, G.R.; Bunzel, L.O. A numerical investigation on piezoelectric energy harvesting from Vortex-Induced Vibrations with one and two degrees of freedom. J. Fluids Struct. 2017, 77, 196–212. [Google Scholar] [CrossRef]
- Talluru, K.M.; Kulandaivelu, V.; Hutchins, N.; Marusic, I. A calibration technique to correct sensor drift issues in hot-wire anemometry. Meas. Sci. Technol. 2014, 25, 105304. [Google Scholar] [CrossRef]
- Que, R.; Zhu, R. Aircraft Aerodynamic Parameter Detection Using Micro Hot-Film Flow Sensor Array and BP Neural Network Identification. Sensors 2012, 12, 10920–10929. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Allotta, B.; Pugi, L.; Massai, T.; Boni, E.; Montagni, M. Design and Calibration of an Innovative Ultrasonic, Arduino Based Anemometer. In Proceedings of the IEEE International Conference on Environment & Electrical Engineering & IEEE Industrial & Commercial Power Systems Europe, Milan, Italy, 6–9 June 2017. [Google Scholar]
- Watkins, S.; Milbank, J.; Loxton, B.J.; Melbourne, W.H. Atmospheric Winds and Their Implications for Microair Vehicles. Aiaa J. 2006, 44, 2591–2600. [Google Scholar] [CrossRef]
- Fan, Y.; Dai, Z.; Xu, Z.; Zheng, S.; Dehkordy, F.M.; Bagtzoglou, A.; Zhang, W.; Gao, P.; Li, B. High resolution air flow velocity monitoring using air flow resistance-type sensor film (AFRSF). Sens. Actuators A Phys. 2019, 297, 111562. [Google Scholar] [CrossRef]
- Zhang, R.; Lin, L.; Jing, Q.; Wu, W.; Zhang, Y.; Jiao, Z.; Yan, L.; Han, R.P.S.; Wang, Z.L. Nanogenerator as an active sensor for vortex capture and ambient wind-velocity detection. Energy Environ. Sci. 2012, 5, 8528–8533. [Google Scholar] [CrossRef]
- Meng, L.; Turner, A.P.; Mak, W.C. Soft and flexible material-based affinity sensors. Biotechnol. Adv. 2020, 39, 107398. [Google Scholar] [CrossRef] [PubMed]
- Hagihghi, R.; Razmjou, A.; Orooji, Y.; Warkiani, M.E.; Asadnia, M. A miniaturized piezoresistive flow sensor for real-time monitoring of intravenous infusion. J. Biomed. Mater. Res. Part B Appl. Biomater. 2019, 108B, 568–576. [Google Scholar] [CrossRef]
- Moshizi, S.A.; Azadi, S.; Belford, A.; Razmjou, A.; Asadnia, M. Development of an Ultra-Sensitive and Flexible Piezoresistive Flow Sensor Using Vertical Graphene Nanosheets. Nano-Micro Lett. 2020, 12, 109. [Google Scholar] [CrossRef]
- Sengupta, D.; Trap, D. Piezoresistive Carbon Nanofiber-Based Cilia-Inspired Flow Sen. Nanomaterials 2020, 10, 211. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bian, Y.; Zhang, Y.; Xia, X. Design and Fabrication of a Multi-electrode Metal-core Piezoelectric Fiber and Its Application as an Airflow Sensor. J. Bionic Eng. 2016, 13, 416–425. [Google Scholar] [CrossRef]
- Bian, Y.; Zhang, Y.; Xia, X. Design and fabrication of a metal core PVDF fiber for an air flow sensor. Smart Mater. Struct. 2015, 24, 105001. [Google Scholar] [CrossRef]
- Wissman, J.P.; Sampath, K.; Freeman, S.E.; Rohde, C.A. Capacitive bio-inspired flow sensing cupula. Sensors 2019, 19, 2639. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barbier, C.; Humphrey, J.A.C.; Paulus, J.; Appleby, M. Design, Fabrication and Testing of a Bioinspired Hybrid Hair-Like Fluid Motion Sensor Array. In Proceedings of the Asme International Mechanical Engineering Congress & Exposition, Seattle, WA, USA, 11–15 November 2007. [Google Scholar]
- He, J.; Zhang, Y.; Zhou, R.; Meng, L.; Chen, T. Recent advances of wearable and flexible piezoresistivity pressure sensor devices and its future prospects. J. Mater. 2020, 6, 86–101. [Google Scholar] [CrossRef]
- Opatkiewicz, J.P.; Lemieux, M.C.; Liu, D.; Vosgueritchian, M.; Barman, S.N.; Elkins, C.M.; Hedrick, J.; Bao, Z. Using nitrile functional groups to replace amines for solution-deposited single-walled carbon nanotube network films. ACS Nano 2012, 6, 4845–4853. [Google Scholar] [CrossRef] [PubMed]
- Lei, T.; Shao, L.L.; Zheng, Y.Q.; Pitner, G.; Bao, Z. Low-voltage high-performance flexible digital and analog circuits based on ultrahigh-purity semiconducting carbon nanotubes. Nat. Commun. 2019, 10, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Chortos, A.; Koleilat, G.I.; Pfattner, R.; Kong, D.; Lin, P.; Nur, R.; Lei, T.; Wang, H.; Liu, N.; Lai, Y.C. Mechanically Durable and Highly Stretchable Transistors Employing Carbon Nanotube Semiconductor and Electrodes. Adv. Mater. 2016, 28, 4441–4448. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Cu, Y.; Xiong, Z.; Cui, Z.; Zhang, T. Silk-molded flexible, ultrasensitive, and highly stable electronic skin for monitoring human physiological signals. Adv. Mater. 2014, 26, 1336–1342. [Google Scholar] [CrossRef]
- Wang, S.; Xu, J.; Wang, W.; Wang, G.J.N.; Rastak, R.; Molina-Lopez, F.; Chung, J.W.; Niu, S.; Feig, V.R.; Lopez, J. Skin electronics from scalable fabrication of an intrinsically stretchable transistor array. Nature 2018, 555, 83–88. [Google Scholar] [CrossRef]
- Zhan, Z.; Lin, R.; Tran, V.-T.; An, J.; Wei, Y.; Du, H.; Tran, T.; Lu, W. Paper/carbon nanotube-based wearable pressure sensor for physiological signal acquisition and soft robotic skin. Acs Appl. Mater. Interfaces 2017, 9, 37921–37928. [Google Scholar] [CrossRef]
- Cheng, L.; Qian, W.; Wei, L.; Zhang, H.; Zhao, T.; Li, M.; Liu, A.; Wu, H. A highly sensitive piezoresistive sensor with interlocked graphene microarrays for meticulous monitoring of human motions. J. Mater. Chem. C 2020, 8, 11525–11531. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, S.; Zeng, J.; Ren, X.; Chee, A.J.Y.; Yiu, B.Y.S.; Chung, W.C.; Yang, Y.; Yu, A.C.H.; Roberts, R.C. High Sensitivity, Wearable, Piezoresistive Pressure Sensors Based on Irregular Microhump Structures and Its Applications in Body Motion Sensing. Small 2016, 12, 3827–3836. [Google Scholar] [CrossRef] [PubMed]
- Su, Y.; Evans, A.; Brunnschweiler, A.; Ensell, G. Characterization of a highly sensitive ultra-thin piezoresistive silicon cantilever probe and its application in gas flow velocity sensing. J. Micromech. Microeng. 2002, 12, 780. [Google Scholar] [CrossRef]
- Wang, Y.-H.; Lee, C.-Y.; Chiang, C.-M. A MEMS-based air flow sensor with a free-standing micro-cantilever structure. Sensors 2007, 7, 2389–2401. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fitting Function | k | b | R-Squared (COD) | Adj. R-Squared |
|---|---|---|---|---|
| Y40(3.2–10.1) | 0.02264 | −0.00602 | 0.99801 | 0.99779 |
| Y30(3.2–10.1) | 0.01009 | −0.06366 | 0.90176 | 0.89084 |
| YL30(V5.2–V10.1) | 0.01318 | −0.26525 | 0.9148 | 0.90059 |
| YL30(V6.2–V10.1) | 0.01657 | −0.56601 | 0.97671 | 0.97205 |
| Y20(3.2–10.1) | 0.00463 | −0.08348 | 0.77769 | 0.75299 |
| YL20(V6.2–V10.1) | 0.00591 | −0.19474 | 0.86661 | 0.83994 |
| YL20(V7.2–V10.1) | 0.01131 | −0.69888 | 0.96796 | 0.95995 |
| YL20(V8.2–V10.1) | 0.0121 | −0.77332 | 0.99362 | 0.9915 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Tran, V.-T.; Du, H.; Wang, J.; Chen, C. A Direct-Writing Approach for Fabrication of CNT/Paper-Based Piezoresistive Pressure Sensors for Airflow Sensing. Micromachines 2021, 12, 504. https://doi.org/10.3390/mi12050504
Chen J, Tran V-T, Du H, Wang J, Chen C. A Direct-Writing Approach for Fabrication of CNT/Paper-Based Piezoresistive Pressure Sensors for Airflow Sensing. Micromachines. 2021; 12(5):504. https://doi.org/10.3390/mi12050504
Chicago/Turabian StyleChen, Jinyan, Van-Thai Tran, Hejun Du, Junshan Wang, and Chao Chen. 2021. "A Direct-Writing Approach for Fabrication of CNT/Paper-Based Piezoresistive Pressure Sensors for Airflow Sensing" Micromachines 12, no. 5: 504. https://doi.org/10.3390/mi12050504