
Online Optimization Method for Nonlinear Model-Predictive Control in Angular Tracking for MEMS Micromirror

Abstract
:1. Introduction
- The Hammerstein model for depicting the complex EDDM is established using online input-output data in random noise environment. Moreover, the rate-dependent Duhem submodel is used to describe the hysteresis phenomenon that caused by loop.
- The mathematical description of control variable can be described using estimated parameters which including linear and hysteresis submodel. In addition, model residual and unmeasurable driven torque, which needs to be estimated is also used to achieve the accurate angular positioning.
- The polynomial obtained by Diophantine equation can not only be used to describe the prediction equation, but also can directly obtain the influence between deflection angle and driven torque.
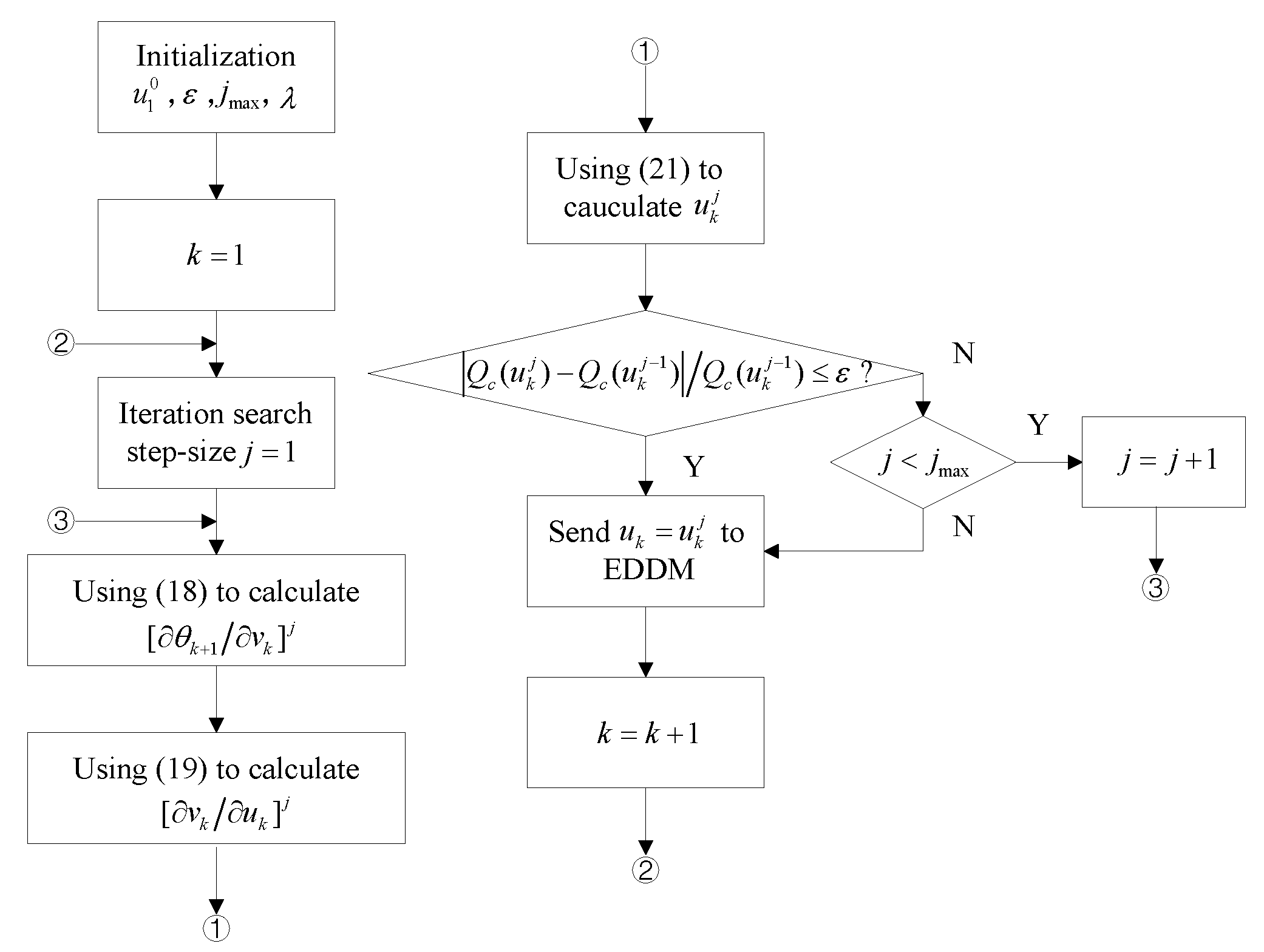
- The residual calculated by the real-time input-output signals and the one-step prediction model are iterated continuously in each sampling time according to the performance index to realize the high-precision positioning of the micromirror system.
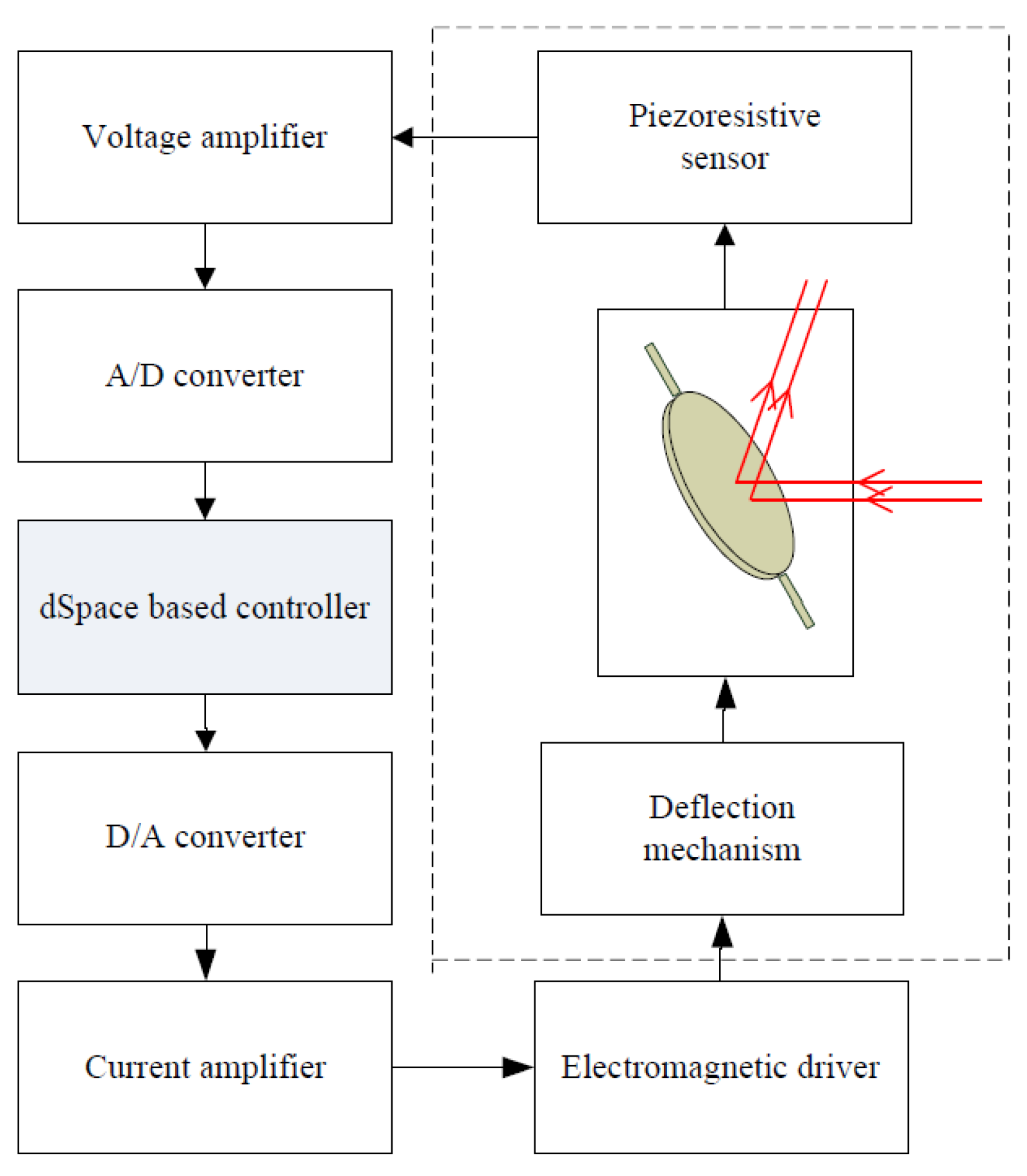
- Rigorous theoretical analysis using discrete Lyapunov candidate function and hardware validation based on real-time signal acquisition for the proposed POC are implemented.
2. Dynamic Property and Model Establishment
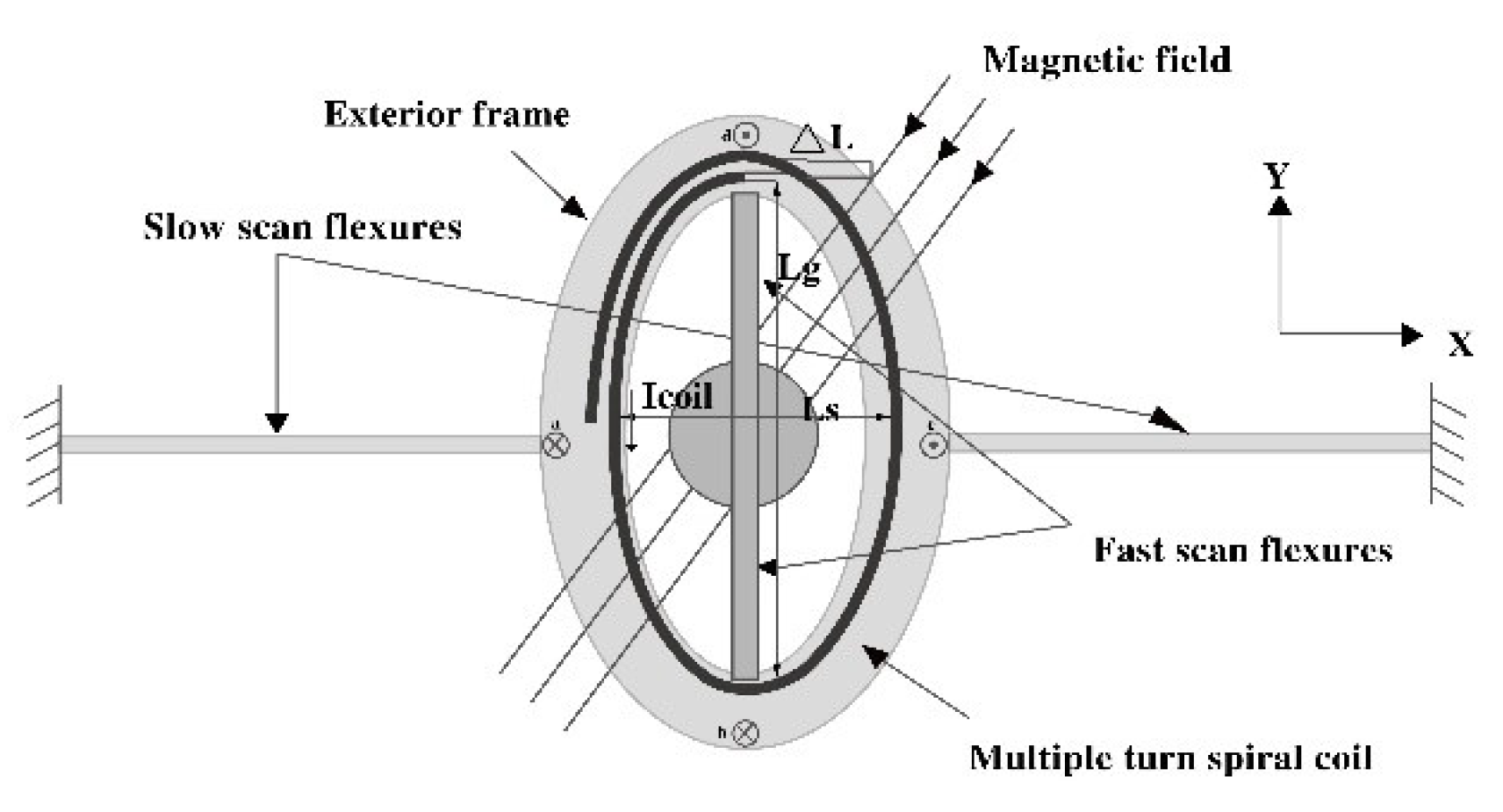
2.1. Basic Dynamic Performance Analysis
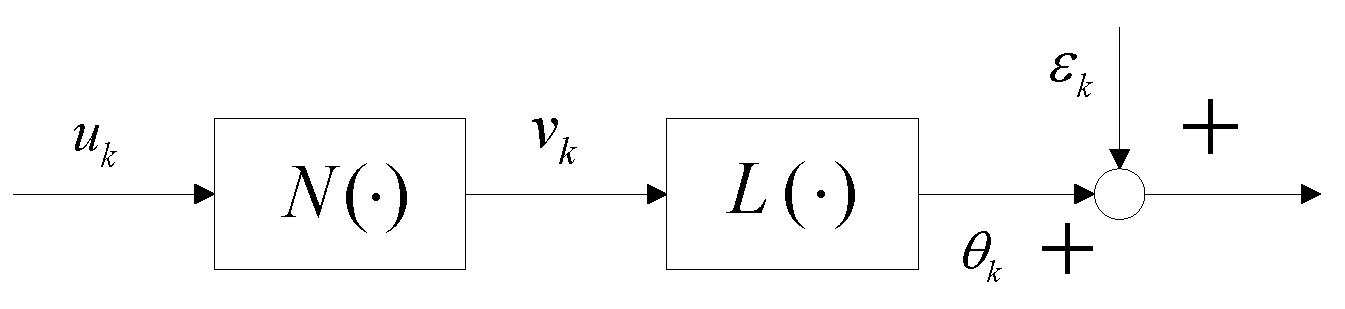
2.2. Architecture of Hammerstein Describing for EDDM
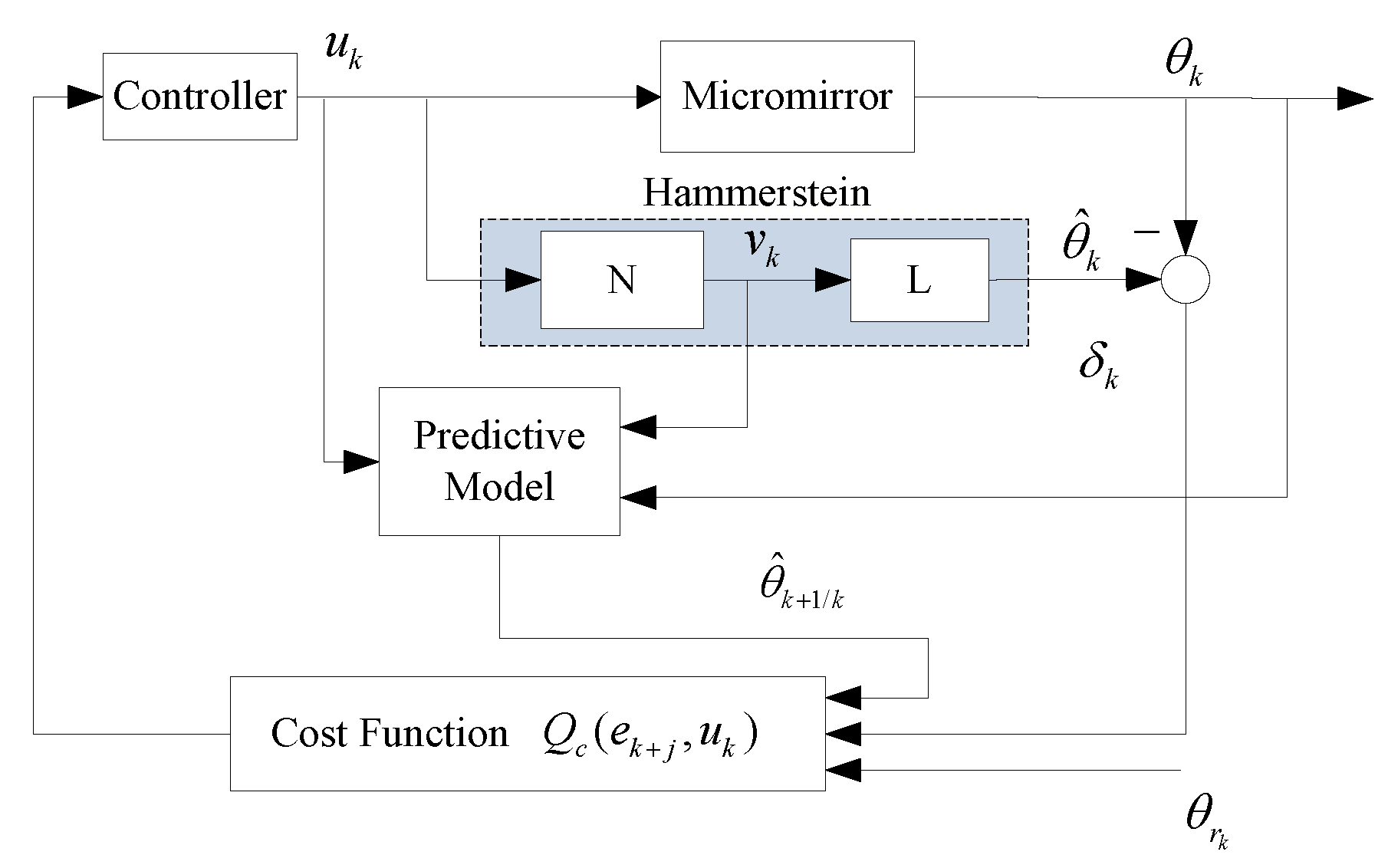
3. Design Philosophy of Nonlinear Predictive Controller
3.1. One-Step Predictive Model for Hammerstein Architecture
3.2. Controller Design Based on Optimization Performance
4. Stability Analysis
5. Experimental Results
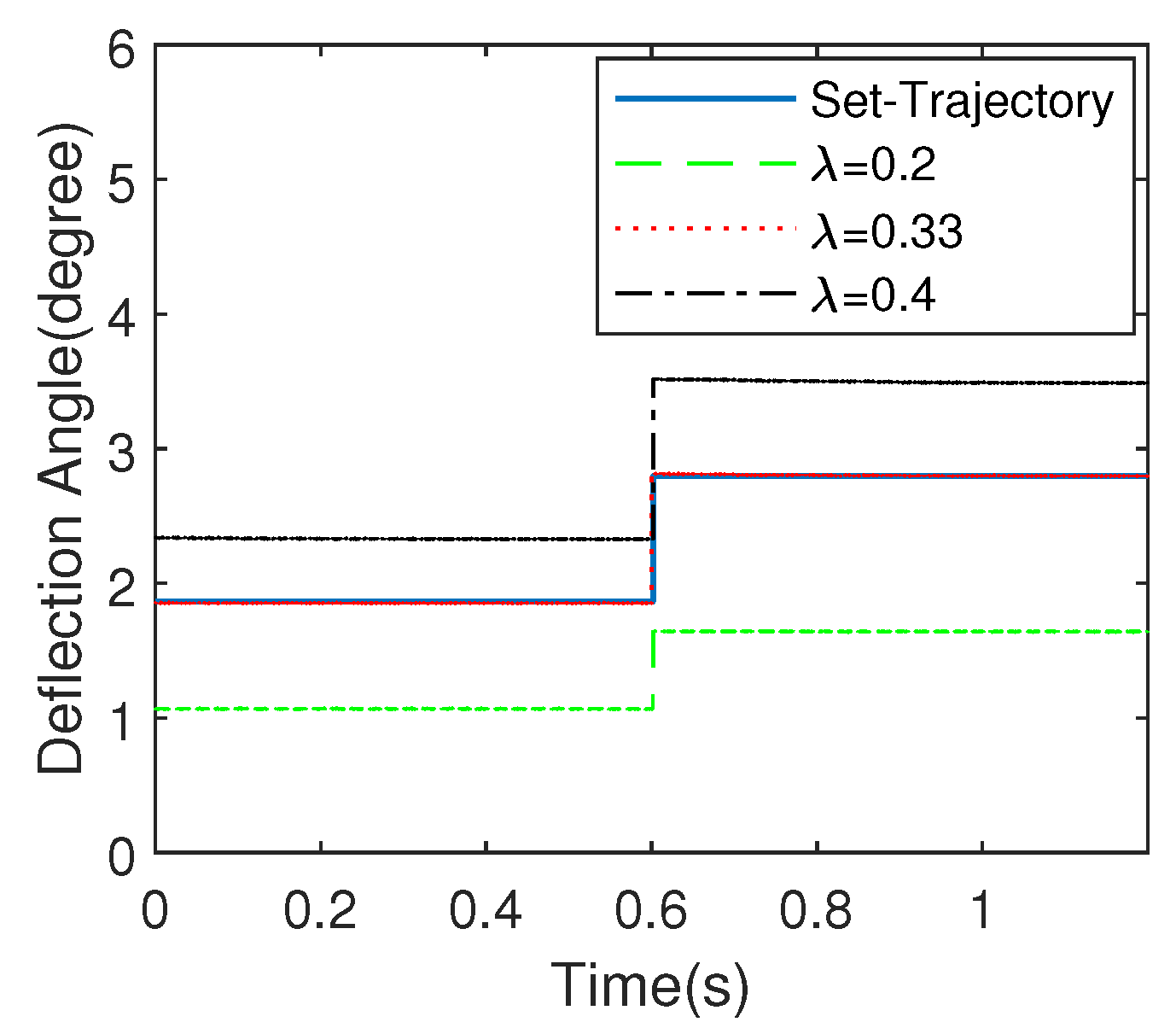
5.1. Effect of Optimization Step-Size on Dynamic Performance
5.1.1. Effect of Step-Size
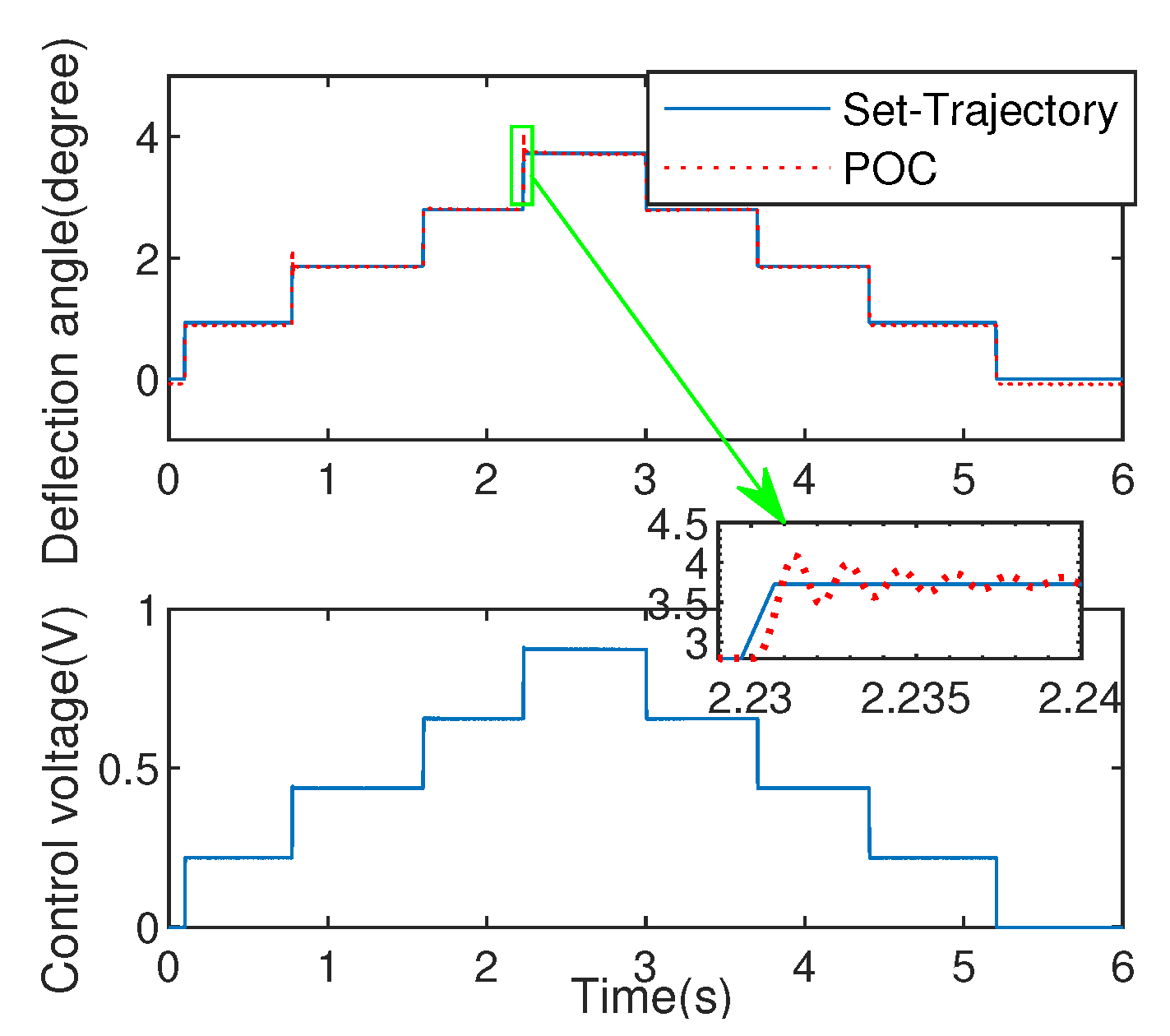
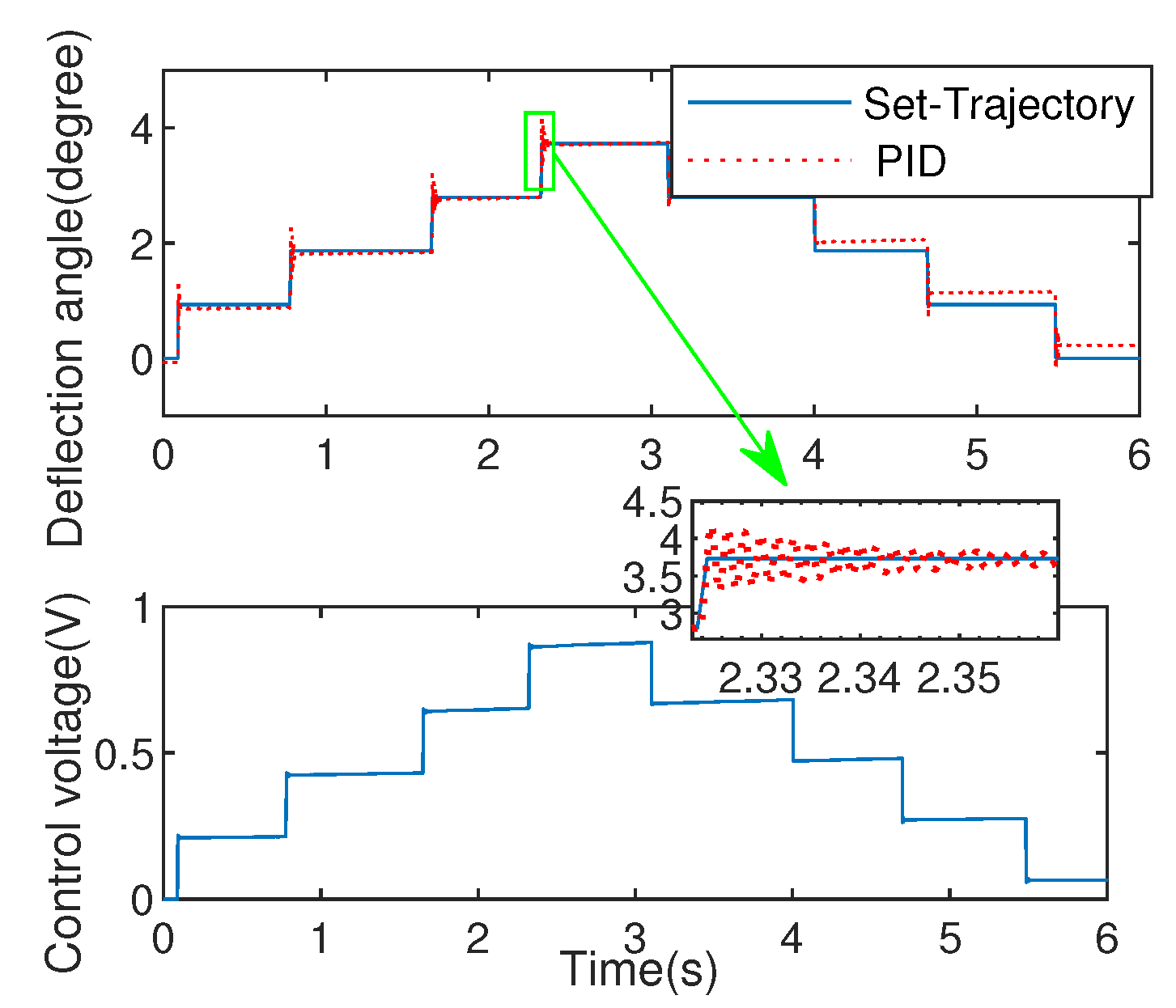
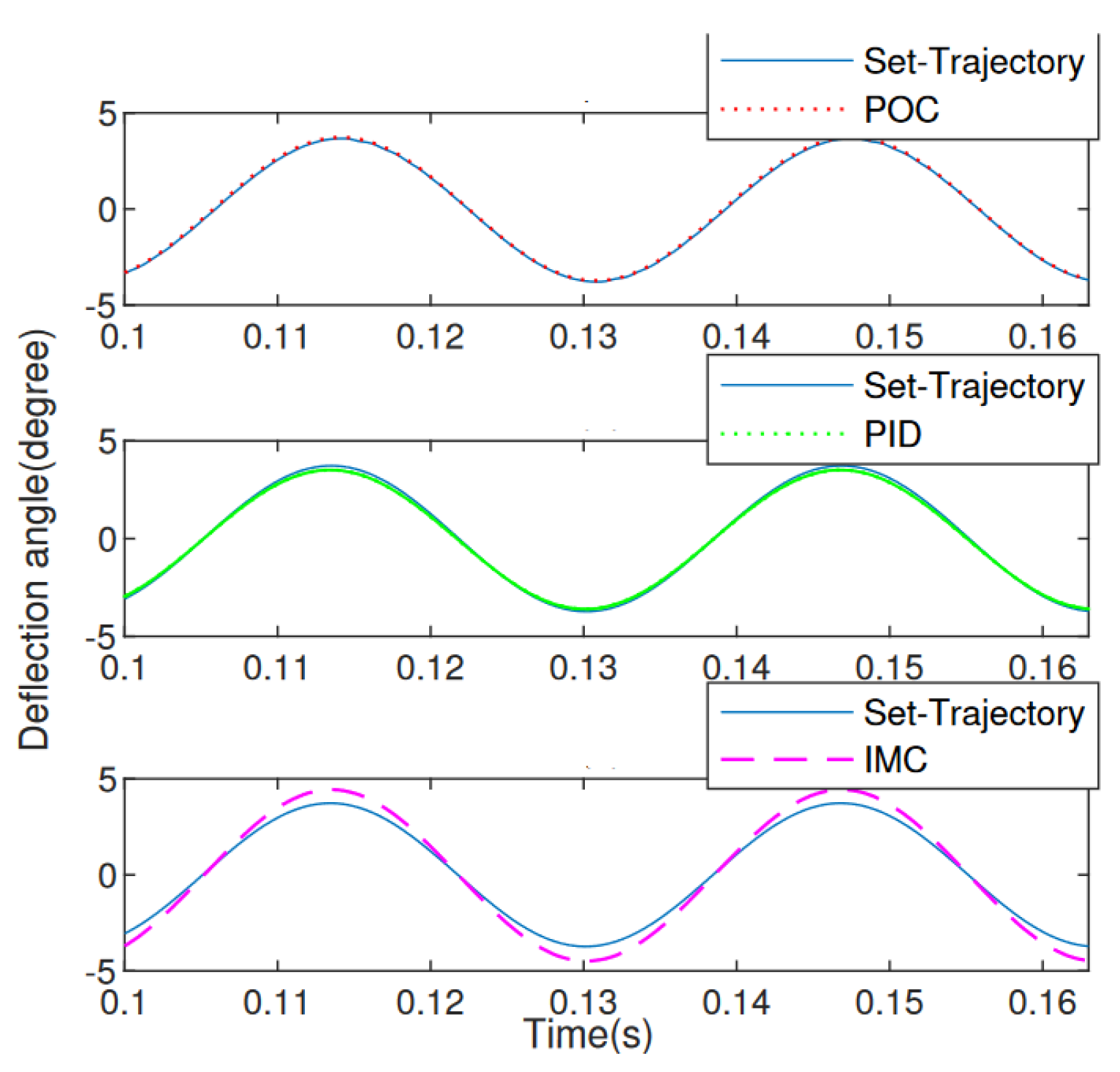
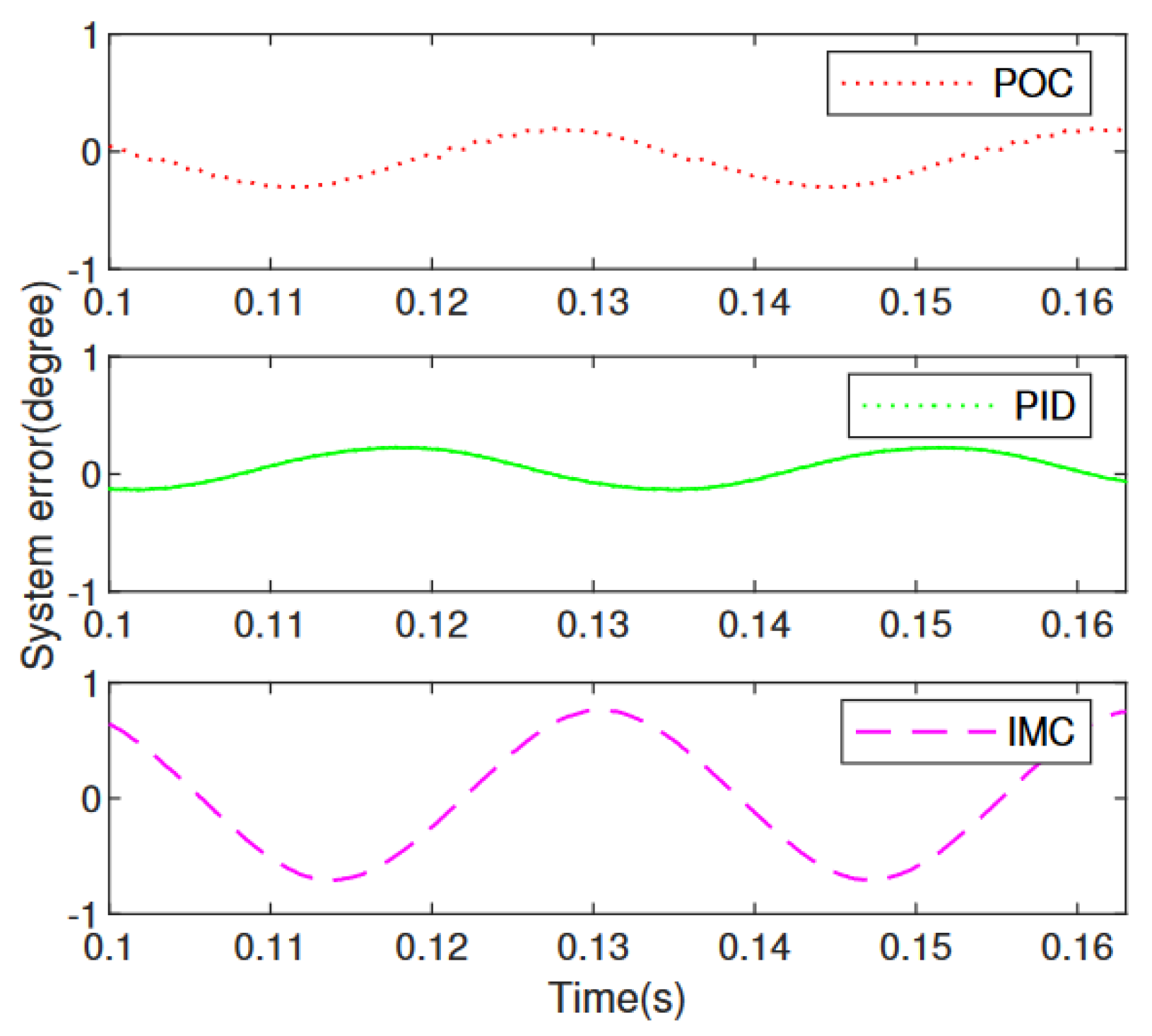
5.1.2. Comparation with PID Excited by Square Wave
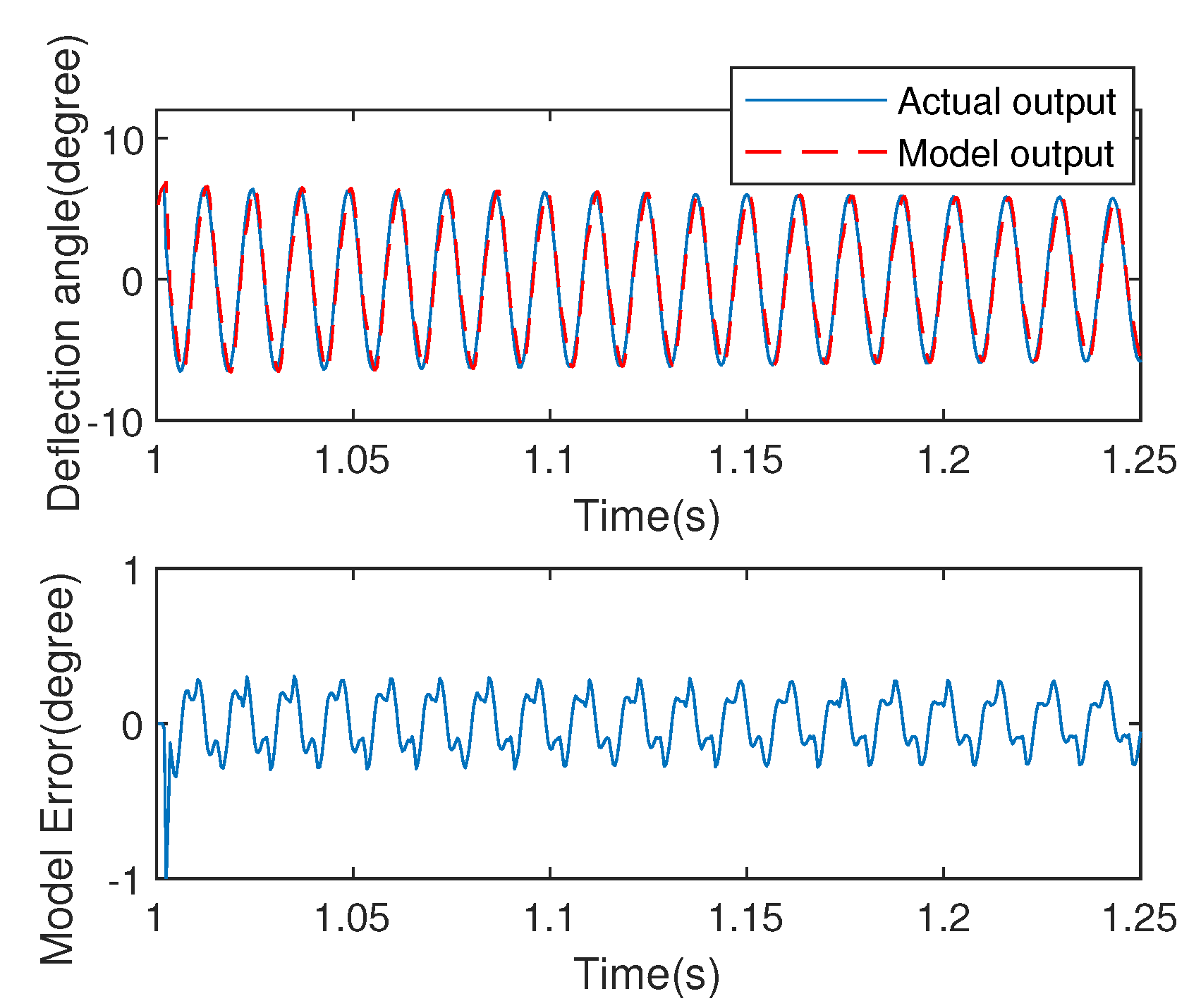
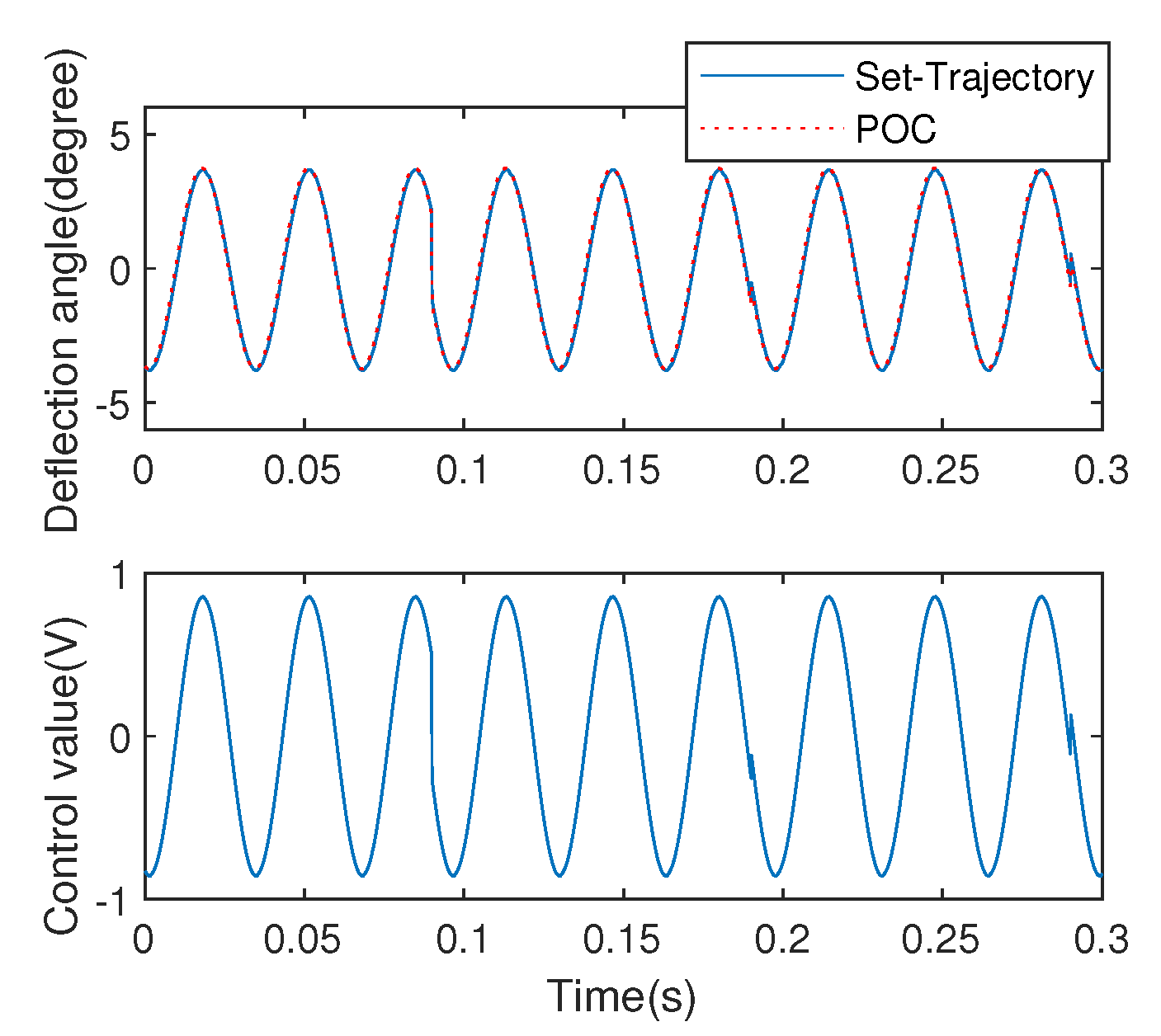
5.2. Result of Experiment Based on POC
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sun, W.; Chen, H.; Yeow, J.T.W. Barrier Lyapunov Function-Based Output Regulation Control of an Electromagnetic Micromirror with Transient Performance Constraint. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 4080–4091. [Google Scholar] [CrossRef]
- Cao, Q.; Tan, Y.; Dong, R.; Shen, W. A Modeling Method of Electromagnetic Micromirror in Random Noisy Environment. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2578–2587. [Google Scholar] [CrossRef]
- Qin, Y.; Sun, W.; Zuo, P.; Yeow, J.T.W. Modeling and closed loop control of a polymer composite-based hard-magnetic micromirror for optical switching applications. Nonlinear Dyn. 2018, 92, 59–74. [Google Scholar] [CrossRef]
- Borovic, B.; Liu, A.Q.; Popa, D.; Cai, H.; Lewis, F.L. Open-loop versus closed-loop control of MEMS devices: Choices and issues. J. Micromech. Microeng. 2005, 15, 1917–1924. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Sun, Z.; Sun, W.; Yeow, J.T.W. Twisting sliding mode control of an electrostatic MEMS micromirror for a laser scanning system. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 8331–8336. [Google Scholar] [CrossRef]
- Chen, H.; Sun, W.J.; Chen, A.I.H.; Yeow, J.T.W.; Sun, Z.D. High performance closed-loop control of a 2D MEMS micromirror with sidewall electrodes for a laser scanning microscope system. In Proceedings of the 2014 International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (3M-NANO), Taipei, Taiwan, 27–31 October 2014; pp. 12–17. [Google Scholar] [CrossRef]
- Xiong, X.; Kamal, S.; Deveerasetty, K.K.; Jin, S.; Li, Y. Sliding Mode Control of Quasi-Static Micro Mirrors with Implicit-Euler Implementation. In Proceedings of the 2018 IEEE International Conference on Real-time Computing and Robotics (RCAR), Kandima, Maldives, 1–5 August 2018; pp. 463–468. [Google Scholar] [CrossRef]
- Tan, J.; Sun, W.; John, Y. Internal Model-Based Robust Tracking Control Design for the MEMS Electromagnetic Micromirror. Sensors 2017, 17, 1215. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, H.; Li, M.; Zhang, Y.; Xie, H.; Chen, C.; Peng, Z.; Su, S. H∞ Robust Control of a Large-Piston MEMS Micromirror for Compact Fourier Transform Spectrometer Systems. Sensors 2018, 18, 508. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tan, J.; Sun, W.; Yeow, J. An Enhanced Robust Control Algorithm Based on CNF and ISM for the MEMS Micromirror against Input Saturation and Disturbance. Micromachines 2017, 8, 326. [Google Scholar] [CrossRef]
- Dong, R.; Tan, Y.; Tan, Q. Mirror Angle Tuning of Electromagnetic Micro-Mirrors With Oscillation Compensation. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2969–2977. [Google Scholar] [CrossRef]
- Tan, J.; Sun, W.; Yeow, J. Tracking of square reference signals using internal model-based LQG robust controller for positioning of a micro-electro-mechanical systems micromirror. IET Micro Nano Lett. 2018, 13, 704–708. [Google Scholar] [CrossRef]
- Schnapp, J.P. Linear-Quadratic Control of a MEMS Micromirror Using Kalman Filtering. 2011. Available online: https://www.researchgate.net/publication/277831105_Linear-Quadratic_Control_of_a_MEMS_Micromirror_using_Kalman_Filtering (accessed on 3 October 2022).
- Tan, Y.; Dong, R.; Li, Z.; Chai, G.; Li, M. Online Optimization Control With Predictive Gradient Descent for MEMS Micro-Mirrors. IEEE Trans. Ind. Electron. 2022, 69, 7307–7317. [Google Scholar] [CrossRef]
- Tan, Y.; Cheng, W.; Dong, R.; Tan, Q.; Cao, Q. Online Optimizing Positioning Control With Model Error Compensator for LEGRV System. IEEE/ASME Trans. Mechatronics 2020, 25, 594–603. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, J.; Huang, L. Model-Free Predictive Current Control of PMSM Drives Based on Extended State Observer Using Ultralocal Model. IEEE Trans. Ind. Electron. 2021, 68, 993–1003. [Google Scholar] [CrossRef]
- Dong, R.; Tan, Y.; Wu, L.; Zhao, P. A Model Independent Control Scheme for Electromagnetic Scanning Micromirrors. IEEE/ASME Trans. Mechatronics 2021, 27, 3255–3264. [Google Scholar] [CrossRef]
- Juneau, T.; Unterkofler, K.; Seliverstov, T.; Zhang, S.; Judy, M. Dual-axis optical mirror positioning using a nonlinear closed-loop controller. In Proceedings of the 12th International Conference on Solid-State Sensors, Actuators and Microsystems, Digest of Technical Papers (Cat. No.03TH8664), Boston, MA, USA, 8–12 June 2003; Volume 1, pp. 560–563. [Google Scholar] [CrossRef]
- Ma, Y.; Islam, S.; Pan, Y.J. Electrostatic Torsional Micromirror with Enhanced Tilting Angle Using Active Control Methods. IEEE/ASME Trans. Mechatronics 2011, 16, 994–1001. [Google Scholar] [CrossRef]
- Zou, Y.; Sun, W.; Yeow, J.T. Nonlinear control for a MEMS hard-magnetic micromirror by using backstepping sliding mode method. In Proceedings of the 2017 IEEE International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (3M-NANO), Shanghai, China, 7–11 August 2017; pp. 254–259. [Google Scholar] [CrossRef]
- Liao, K.M.; Wang, Y.C.; Yeh, C.H.; Chen, R. Closed-loop adaptive control for electrostatically driven torsional micromirrors. J. Microlithogr. Microfabr. Microsyst. 2005, 4, 1722–1727. [Google Scholar] [CrossRef]
- Ahmad, I. A Lyapunov-based direct adaptive controller for the suppression and synchronization of a perturbed nuclear spin generator chaotic system. Appl. Math. Comput. 2020, 395, 125858. [Google Scholar] [CrossRef]
- Talghader, J.J. Thermal and mechanical phenomena in micromechanical optics. J. Phys. D Appl. Phys. 2004, 37, R109–R122. [Google Scholar] [CrossRef]
- Doll, J.C.; Pruitt, B.L. Piezoresistor Design and Applications; Springer: New York, NY, USA, 2013. [Google Scholar]
- Majed, A.G.; Ayman, A.; Sangtak, P.; Li, B.; Mahmoud, K.; Eihab, A.R.; Glenn, H.; Mustafa, Y. Nonlinear Parameter Identification of a Resonant Electrostatic MEMS Actuator. Sensors 2017, 17, 1121. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hodgdon, M.L. Mathematical theory and calculations of magnetic hysteresis curves. IEEE Trans. Magn. 1988, 24, 3120–3122. [Google Scholar] [CrossRef]
- Oh, J.; Bernstein, D. Identification of rate-dependent hysteresis using the semilinear Duhem model. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 5, pp. 4776–4781. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Method | MSE |
|---|---|
| POC | 0.0404 |
| PID | 0.0628 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Q.; Tan, Y. Online Optimization Method for Nonlinear Model-Predictive Control in Angular Tracking for MEMS Micromirror. Micromachines 2022, 13, 1867. https://doi.org/10.3390/mi13111867
Cao Q, Tan Y. Online Optimization Method for Nonlinear Model-Predictive Control in Angular Tracking for MEMS Micromirror. Micromachines. 2022; 13(11):1867. https://doi.org/10.3390/mi13111867
Chicago/Turabian StyleCao, Qingmei, and Yonghong Tan. 2022. "Online Optimization Method for Nonlinear Model-Predictive Control in Angular Tracking for MEMS Micromirror" Micromachines 13, no. 11: 1867. https://doi.org/10.3390/mi13111867