

The Phase Modulating Micro-Mover Based on the MHD/MET System in the Reference Arm of the Scanning Interferometer
 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
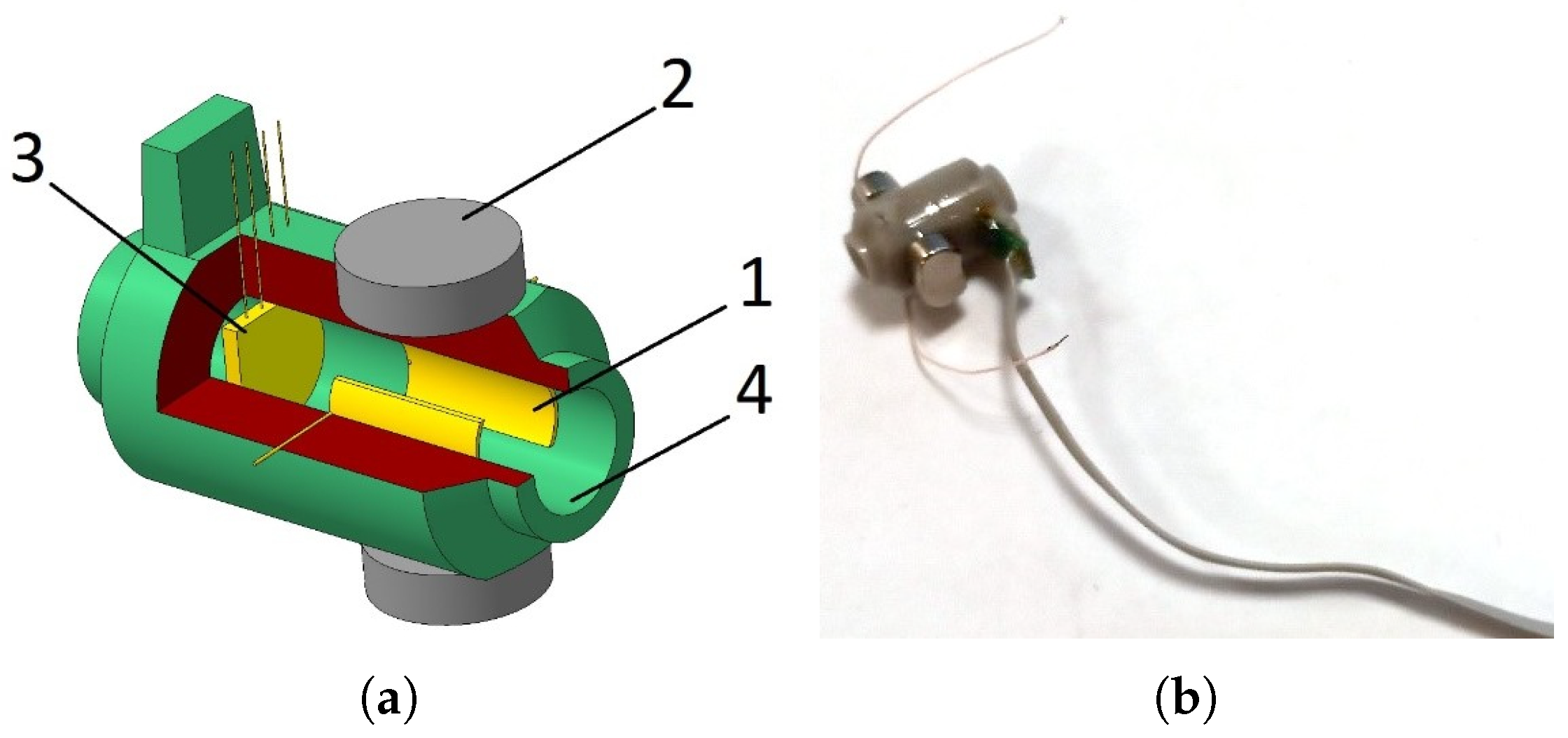
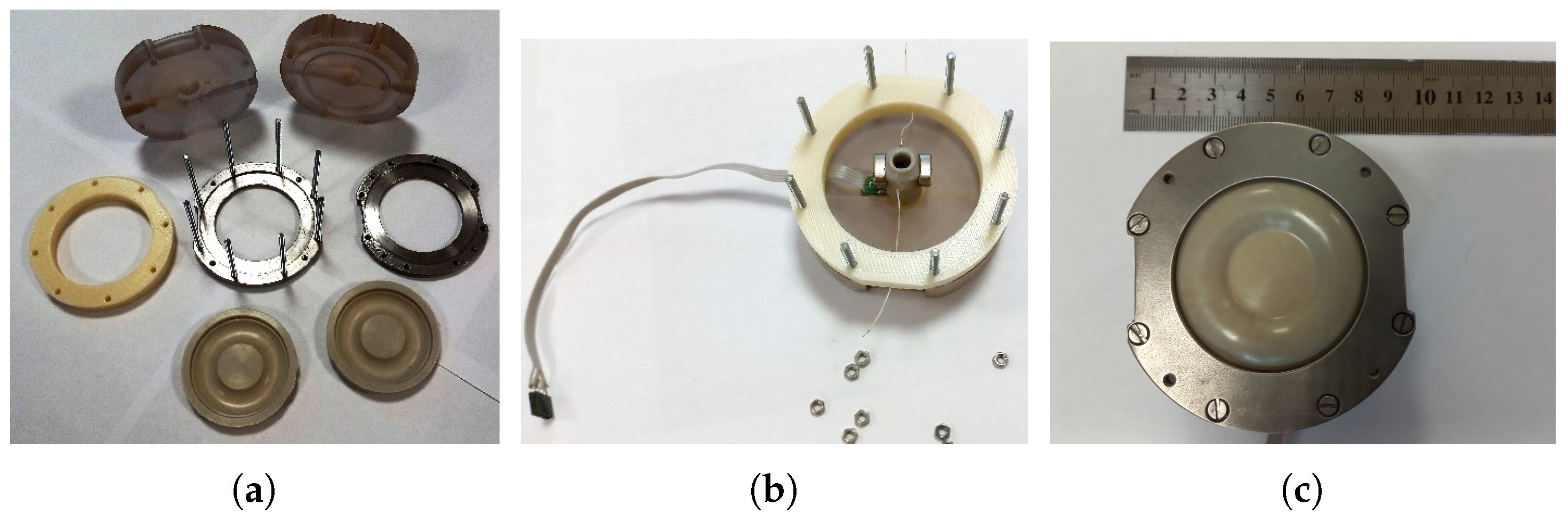
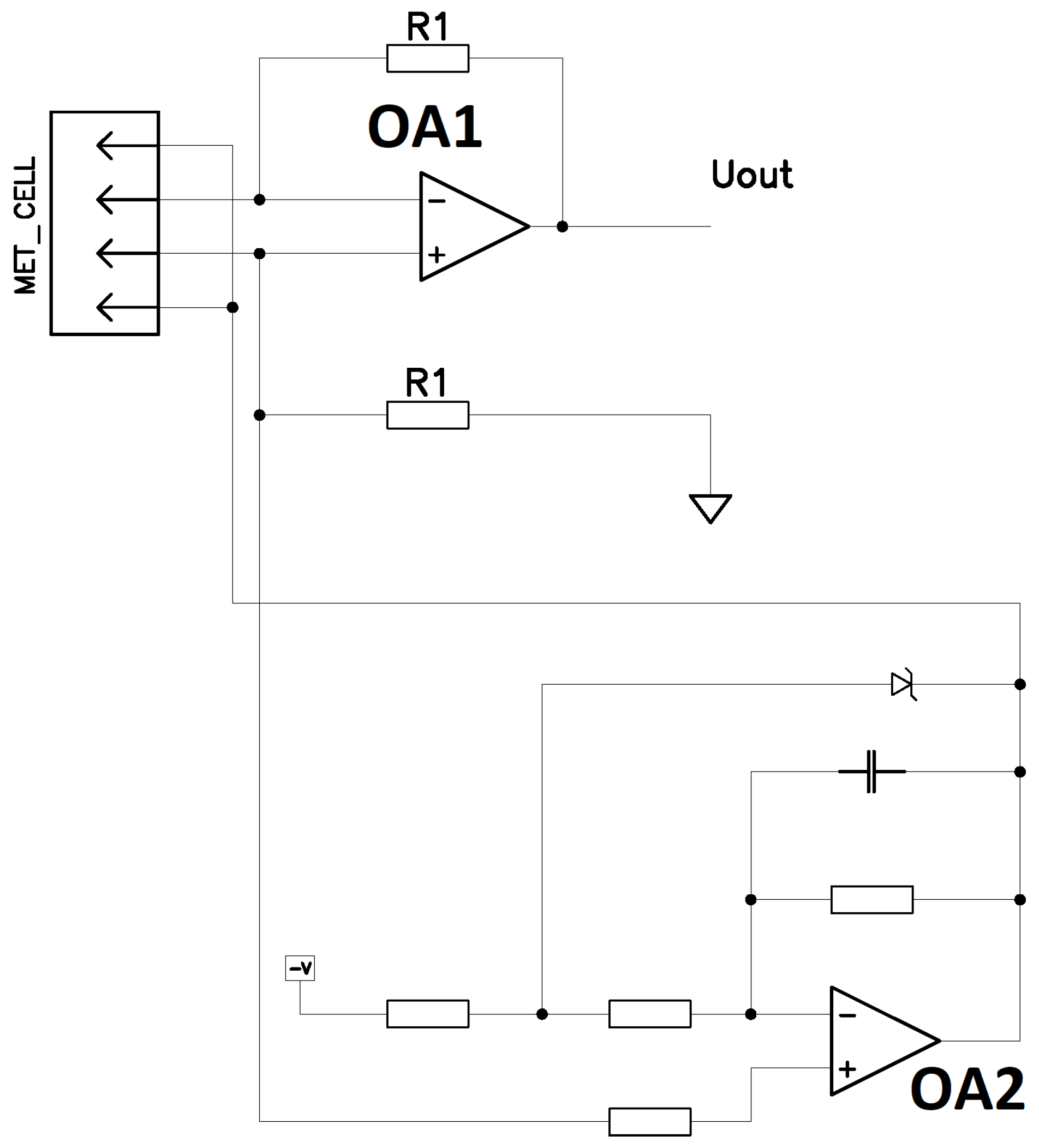
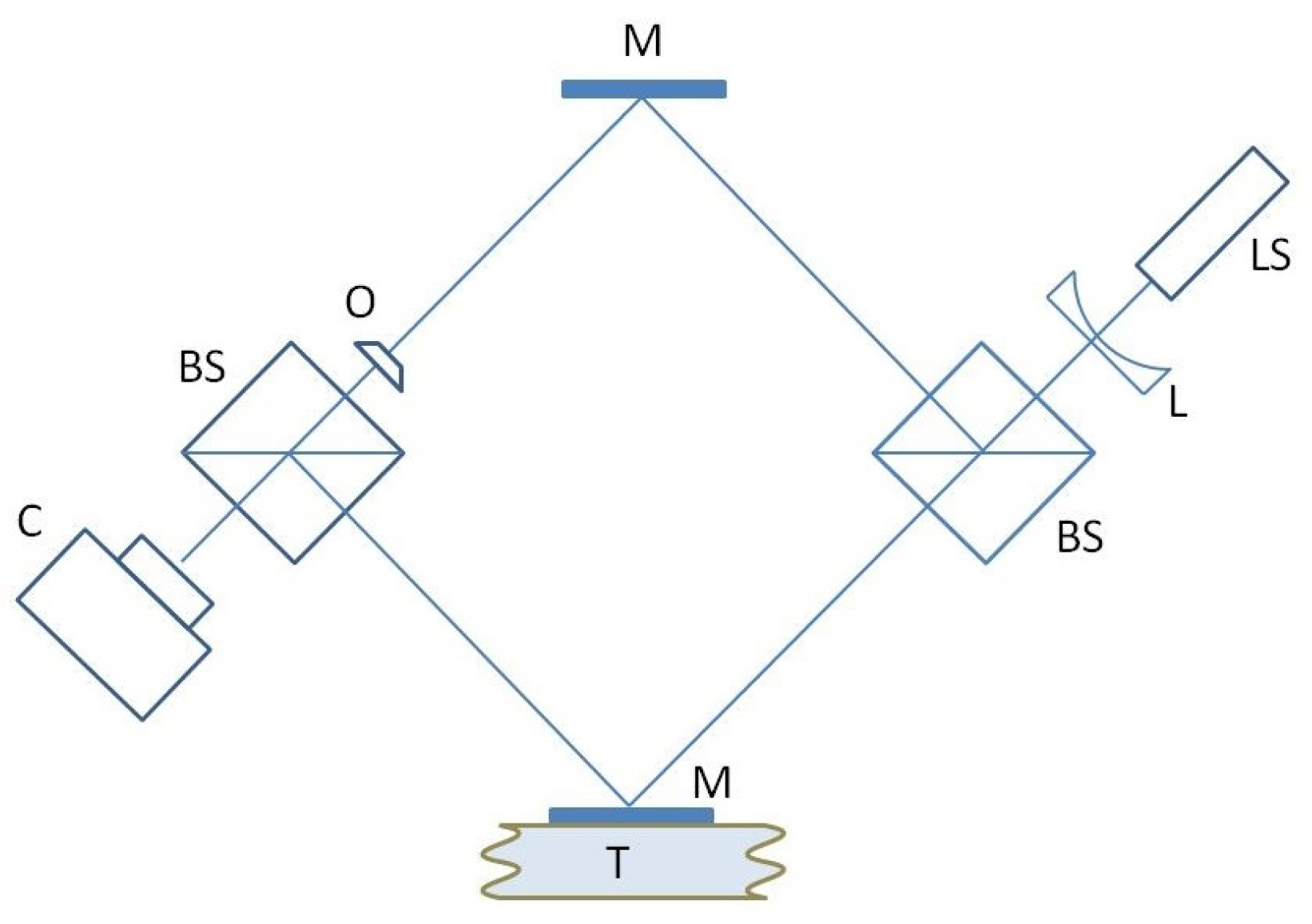
2.1. MHD/MET System Design
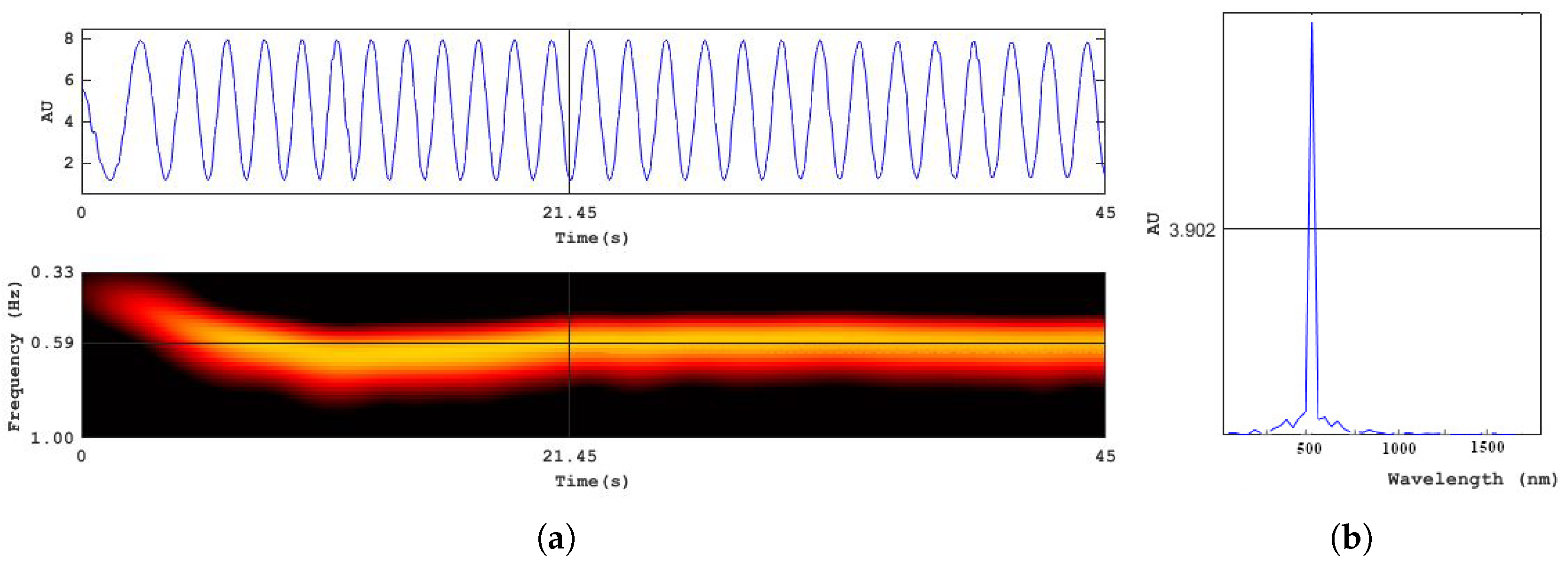
2.2. Study of the Frequency Response of the MET Sensor
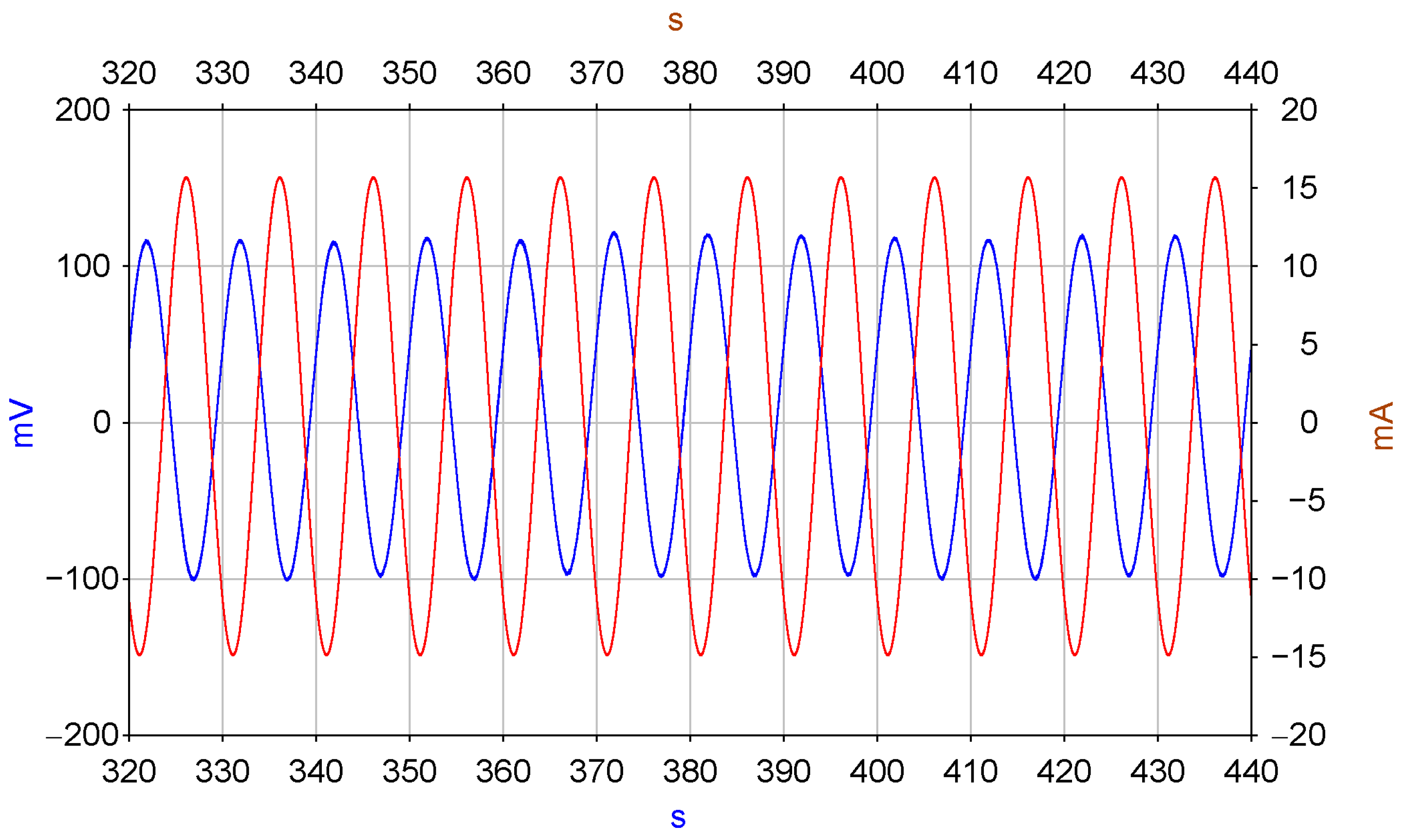
2.3. Study of the Frequency Response of the MHD Actuator/MET Sensor System
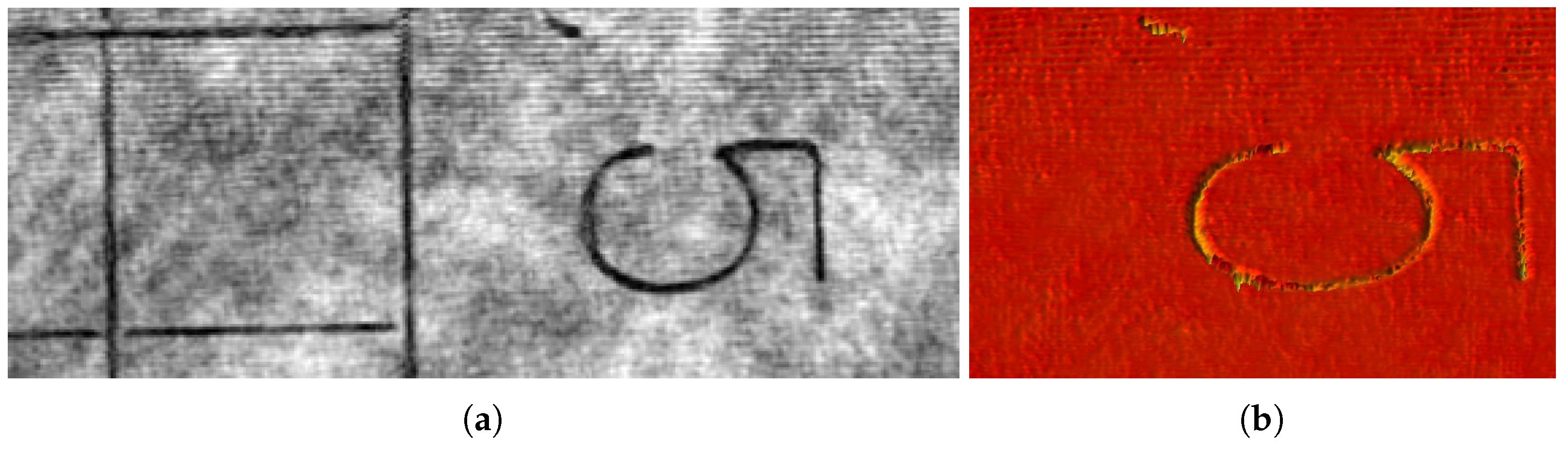
3. Experimental Verification
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MHD | Magnetohydrodynamic |
| MET | Molecular electronic transducer |
| PSDH | Phase-shifting digital holography |
| CMOS | Complimentary metal–oxide–semiconductor |
References
- Yamaguchi, I.; Zhang, T. Phase-shifting digital holography. Opt. Lett. 1997, 22, 1268–1270. [Google Scholar] [CrossRef] [PubMed]
- Kalenkov, S.G.; Kalenkov, G.S.; Shtanko, A.E. Continuous phase-shifting holography. J. Opt. Soc. Am. A 2020, 37, 39–44. [Google Scholar] [CrossRef] [PubMed]
- Yamaguchi, I.; ichi Kato, J.; Ohta, S.; Mizuno, J. Image formation in phase-shifting digital holography and applications to microscopy. Appl. Opt. 2001, 40, 6177–6186. [Google Scholar] [CrossRef] [PubMed]
- Kalenkov, S.G.; Kalenkov, G.S.; Shtanko, A.E. Spectrally-spatial fourier-holography. Opt. Express 2013, 21, 24985–24990. [Google Scholar] [CrossRef] [PubMed]
- Kalenkov, S.; Kalenkov, G.; Shtanko, A. Holographic Fourier transform spectroscopy of biosamples. In Proceedings of the Light, Energy and the Environment, Leipzig, Germany, 14–17 November 2016; Optica Publishing Group: Washington, DC, USA, 2016; p. FTu2E.7. [Google Scholar] [CrossRef]
- Kalenkov, S.G.; Kalenkov, G.S.; Shtanko, A.E. Self-reference hyperspectral holographic microscopy. J. Opt. Soc. Am. A 2019, 36, A34–A38. [Google Scholar] [CrossRef] [PubMed]
- Kalenkov, S.G.; Kalenkov, G.S.; Shtanko, A.E. Hyperspectral holography: An alternative application of the Fourier transform spectrometer. J. Opt. Soc. Am. B 2017, 34, B49–B55. [Google Scholar] [CrossRef]
- Li, E.; Yao, J.; Yu, D.; Xi, J.; Chicharo, J. Optical phase shifting with acousto-optic devices. Opt. Lett. 2005, 30, 189–191. [Google Scholar] [CrossRef] [Green Version]
- Takaki, Y.; Kawai, H.; Ohzu, H. Hybrid holographic microscopy free of conjugate and zero-order images. Appl. Opt. 1999, 38, 4990–4996. [Google Scholar] [CrossRef]
- Xi, T.; Di, J.; Guan, X.; Li, Y.; Ma, C.; Zhang, J.; Zhao, J. Phase-shifting infrared digital holographic microscopy based on an all-fiber variable phase shifter. Appl. Opt. 2017, 56, 2686–2690. [Google Scholar] [CrossRef]
- Huang, H.; Agafonov, V.; Yu, H. Molecular electric transducers as motion sensors: A review. Sensors 2013, 13, 4581–4597. [Google Scholar] [CrossRef] [Green Version]
- Antonov, A.; Shabalina, A.; Razin, A.; Avdyukhina, S.; Egorov, I.; Agafonov, V. Low-frequency seismic node based on molecular-electronic transfer sensors for marine and transition zone exploration. J. Atmos. Ocean. Technol. 2017, 34, 1743–1748. [Google Scholar] [CrossRef]
- Potylitsyn, V.; Kudinov, D.; Dmitry, A.; Kokhonkova, E.; Kurkov, S.; Egorov, I.; Pliss, A. Study of the seismoelectric effect of the second kind using molecular sensors. Sensors 2021, 21, 2301. [Google Scholar] [CrossRef]
- Krylov, A.A.; Egorov, I.V.; Kovachev, S.A.; Ilinskiy, D.A.; Ganzha, O.Y.; Timashkevich, G.K.; Roginskiy, K.A.; Kulikov, M.E.; Novikov, M.A.; Ivanov, V.N.; et al. Ocean-bottom seismographs based on broadband met sensors: Architecture and deployment case study in the arctic. Sensors 2021, 21, 3979. [Google Scholar] [CrossRef]
- Xu, C.; Wang, J.; Chen, D.; Chen, J.; Liu, B.; Qi, W.; Zheng, X.; Wei, H.; Zhang, G. The Electrochemical Seismometer Based on a Novel Designed Sensing Electrode for Undersea Exploration. In Proceedings of the 2019 20th International Conference on Solid-State Sensors, Actuators and Microsystems & Eurosensors XXXIII (TRANSDUCERS & EUROSENSORS XXXIII), Berlin, Germany, 23–27 June 2019; pp. 2053–2056. [Google Scholar] [CrossRef]
- Bugaev, A.; Agafonova, V.; Egorov, I.; Agafonova, E.; Avdyukhina, S. Influence of the Dielectric Coating of the Outer Side of the Cathode in the Anode–Cathode Pairs of a Molecular Electronic Sensitive Element on the Conversion Coefficient. Micromachines 2022, 13, 360. [Google Scholar] [CrossRef]
- Krishtop, V.G.; Zhevnenko, D.A.; Gornev, E.G.; Vergeles, S.S.; Bugaev, A.S.; Popov, V.G.; Dudkin, P.V.; Kohanovsky, S.V.; Krishtop, T.V. Technology and application of electromechanical motion sensors. Adv. Mater. Proc. 2019, 4, 3. [Google Scholar] [CrossRef] [Green Version]
- She, X.; Wang, J.; Chen, D.; Chen, J.; Xu, C.; Qi, W.; Liu, B.; Liang, T. MEMS-based electrochemical seismometer relying on a CAC integrated three-electrode structure. Sensors 2021, 21, 809. [Google Scholar] [CrossRef]
- Xu, C.; Wang, J.; Chen, D.; Chen, J.; Qi, W.; Liu, B.; She, X.; Liang, T. The Design and Fabrication of the High Integrated Sensitive Electrodes by Adopting the Anodic Bonding Technology for the Electrochemical Seismic Sensors. In Proceedings of the 2021 IEEE 34th International Conference on Micro Electro Mechanical Systems (MEMS), Gainesville, FL, USA, 25–29 January 2021; pp. 378–381. [Google Scholar] [CrossRef]
- Chen, L.; Chen, D.; Wang, J.; Sun, Z.; Li, G.; Chen, J. A MEMS based integrated three axial electrochemical seismic sensor. In Proceedings of the 2017 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017; pp. 1017–1020. [Google Scholar] [CrossRef]
- Krishtop, T.; Zhevnenko, D.; Kokhanovsky, S.; Dudkin, P.; Zlobin, A.; Belyaev, A.; Krishtop, V. High-sensitive ultra-low frequency hydrophone. In Proceedings of the International Conference on Micro- and Nano-Electronics 2018, Zvenigorod, Russian, 1–5 October 2018; Volume 11022. [Google Scholar] [CrossRef]
- Egorov, E.; Shabalina, A.; Zaytsev, D.; Velichko, G. Low Frequency Hydrophone for Marine Seismic Exploration Systems. In Proceedings of the 5th International Conference on Sensors Engineering and Electronics Instrumentation Advances (SEIA’2019), Tenerife, Spain, 25–27 September 2019; pp. 69–70. [Google Scholar]
- Zaitsev, D.; Egor, E.; Shabalina, A. High resolution miniature MET sensors for healthcare and sport applications. In Proceedings of the 2018 12th International Conference on Sensing Technology (ICST), Limerick, Ireland, 4–6 December 2018; pp. 287–292. [Google Scholar] [CrossRef]
- Mitra, S.; Chakraborty, S. Microfluidics and Nanofluidics Handbook: Chemistry, Physics, and Life Science Principles; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Liang, T.; Wang, J.; Chen, D.; Liu, B.; She, X.; Xu, C.; Qi, W.; Agafonov, V.; Egorov, E.; Chen, J. A MEMS-Based Electrochemical Angular Accelerometer with a Force-Balanced Negative Feedback. IEEE Sens. J. 2021, 21, 15972–15978. [Google Scholar] [CrossRef]
- Egorov, E.; Agafonov, V.; Avdyukhina, S.; Borisov, S. Angular molecular-electronic sensor with negative magnetohydrodynamic feedback. Sensors 2018, 18, 245. [Google Scholar] [CrossRef] [Green Version]
- Anikin, E.; Egorov, E.; Agafonov, V. Dependence of Self-Noise of the Angular Motion Sensor Based on the Technology of Molecular-Electronic Transfer, on the Area of the Electrodes. IEEE Sens. Lett. 2018, 2, 1–4. [Google Scholar] [CrossRef]
- Egorov, E.V.; Egorov, I.V.; Agafonov, V.M. Self-Noise of the MET angular motion seismic sensors. J. Sens. 2015, 2015, 512645. [Google Scholar] [CrossRef] [Green Version]
- Stockwell, R.; Mansinha, L.; Lowe, R. Localization of the complex spectrum: The S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalenkov, S.; Skvortsov, P.; Tarasenko, A.; Sharov, D.; Shtanko, A. The Phase Modulating Micro-Mover Based on the MHD/MET System in the Reference Arm of the Scanning Interferometer. Micromachines 2022, 13, 1972. https://doi.org/10.3390/mi13111972
Kalenkov S, Skvortsov P, Tarasenko A, Sharov D, Shtanko A. The Phase Modulating Micro-Mover Based on the MHD/MET System in the Reference Arm of the Scanning Interferometer. Micromachines. 2022; 13(11):1972. https://doi.org/10.3390/mi13111972
Chicago/Turabian StyleKalenkov, Sergey, Pavel Skvortsov, Aleksandr Tarasenko, Dmitry Sharov, and Alexander Shtanko. 2022. "The Phase Modulating Micro-Mover Based on the MHD/MET System in the Reference Arm of the Scanning Interferometer" Micromachines 13, no. 11: 1972. https://doi.org/10.3390/mi13111972
APA StyleKalenkov, S., Skvortsov, P., Tarasenko, A., Sharov, D., & Shtanko, A. (2022). The Phase Modulating Micro-Mover Based on the MHD/MET System in the Reference Arm of the Scanning Interferometer. Micromachines, 13(11), 1972. https://doi.org/10.3390/mi13111972