
Design of an Effective Prosthetic Hand System for Adaptive Grasping with the Control of Myoelectric Pattern Recognition Approach

 and
and
Abstract
:1. Introduction
2. Method
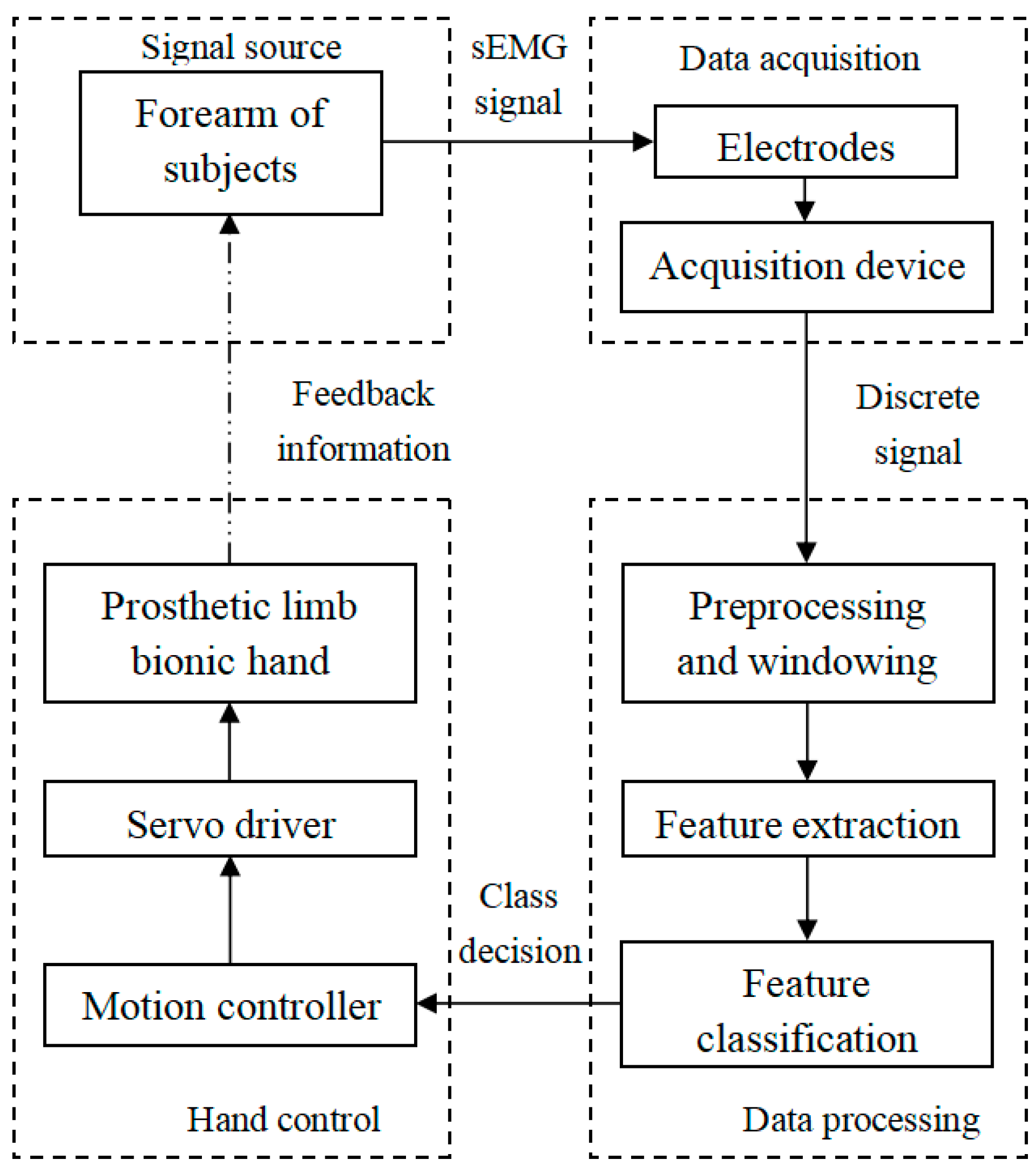
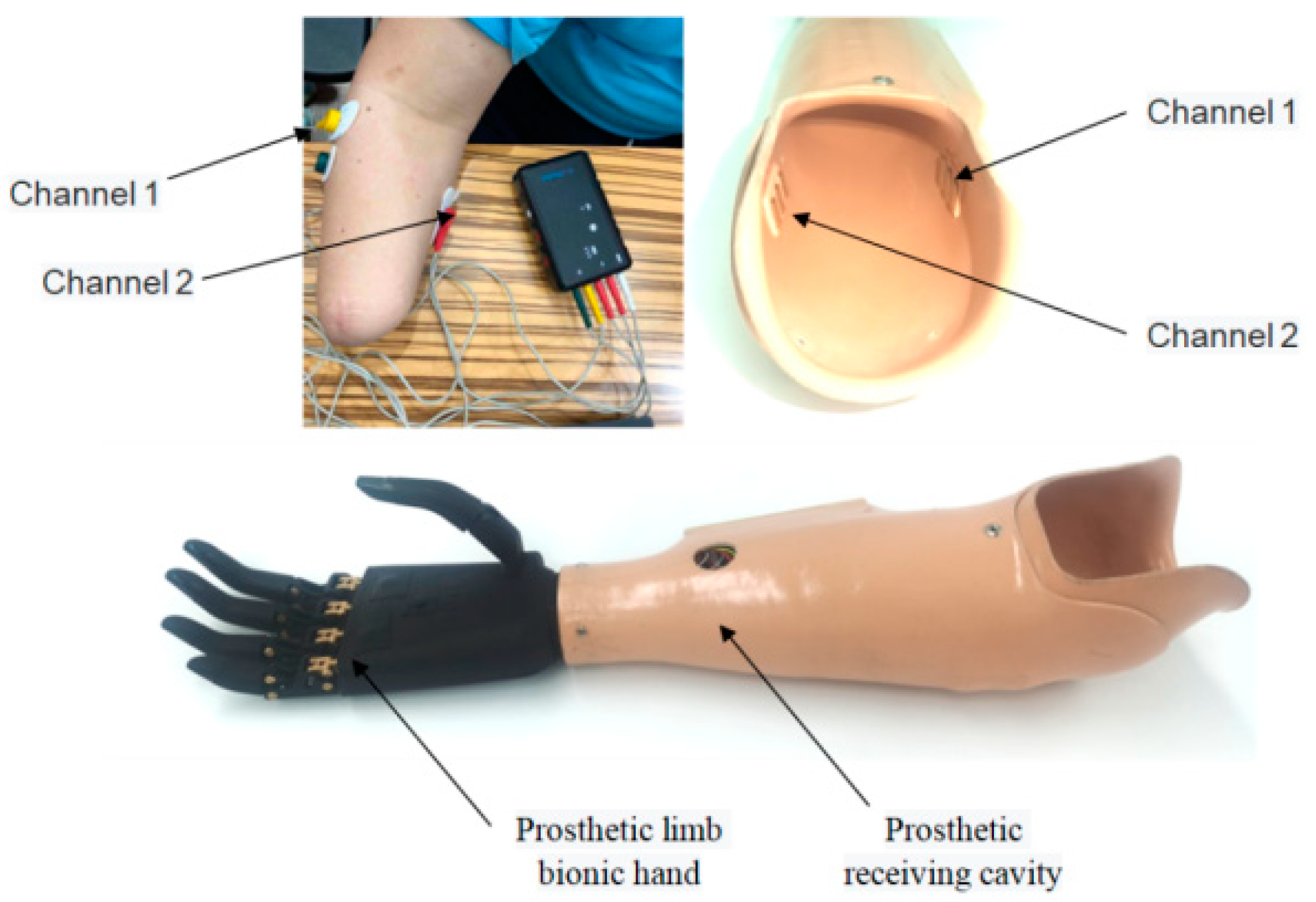
2.1. System Components of Hardware System
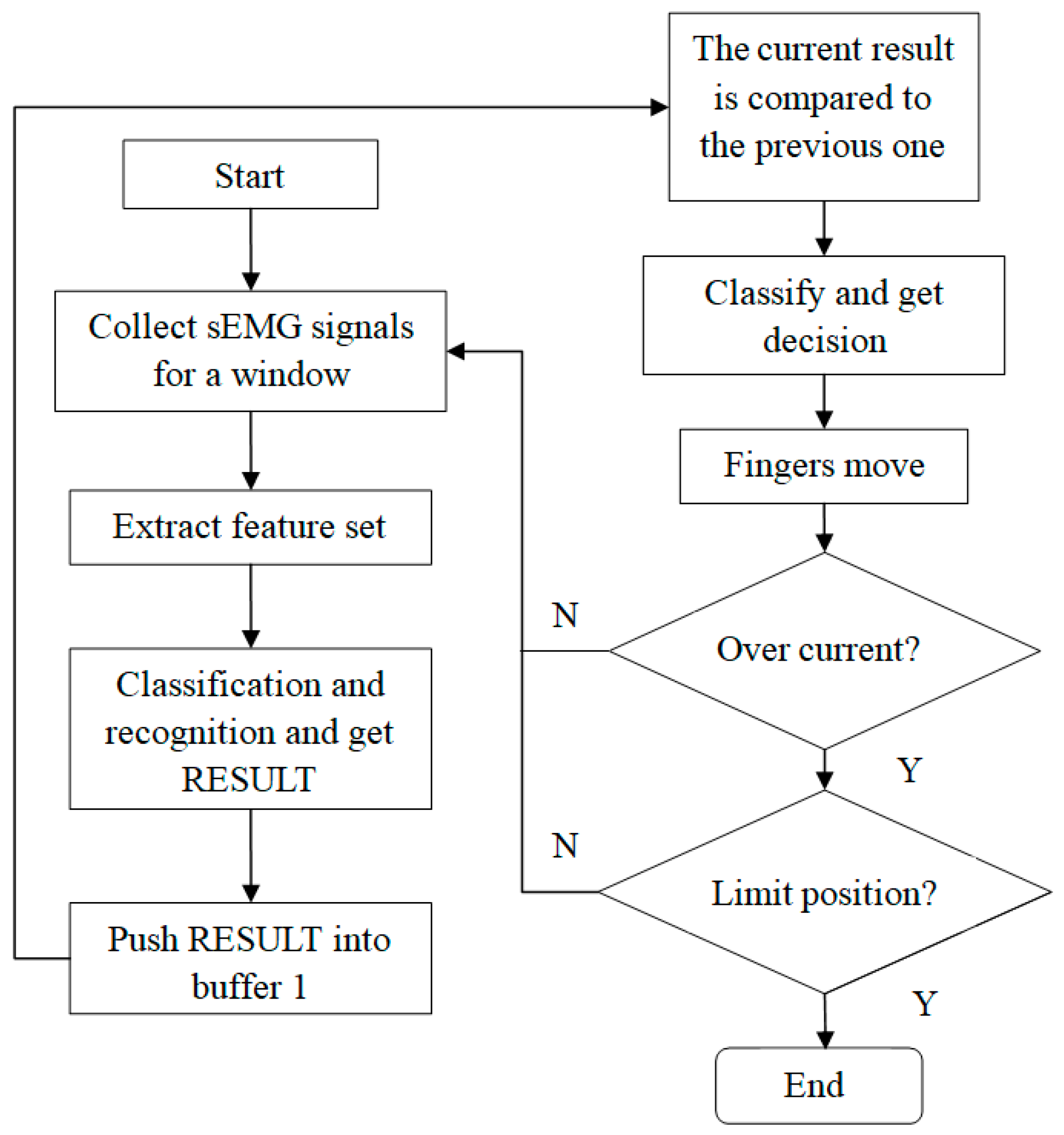
2.2. Control Strategy for Prosthetic Bionic Hand
2.2.1. Control Process of BIT Hand C
2.2.2. Control Strategy of BIT Hand C
3. Data Processing
3.1. Data Collection
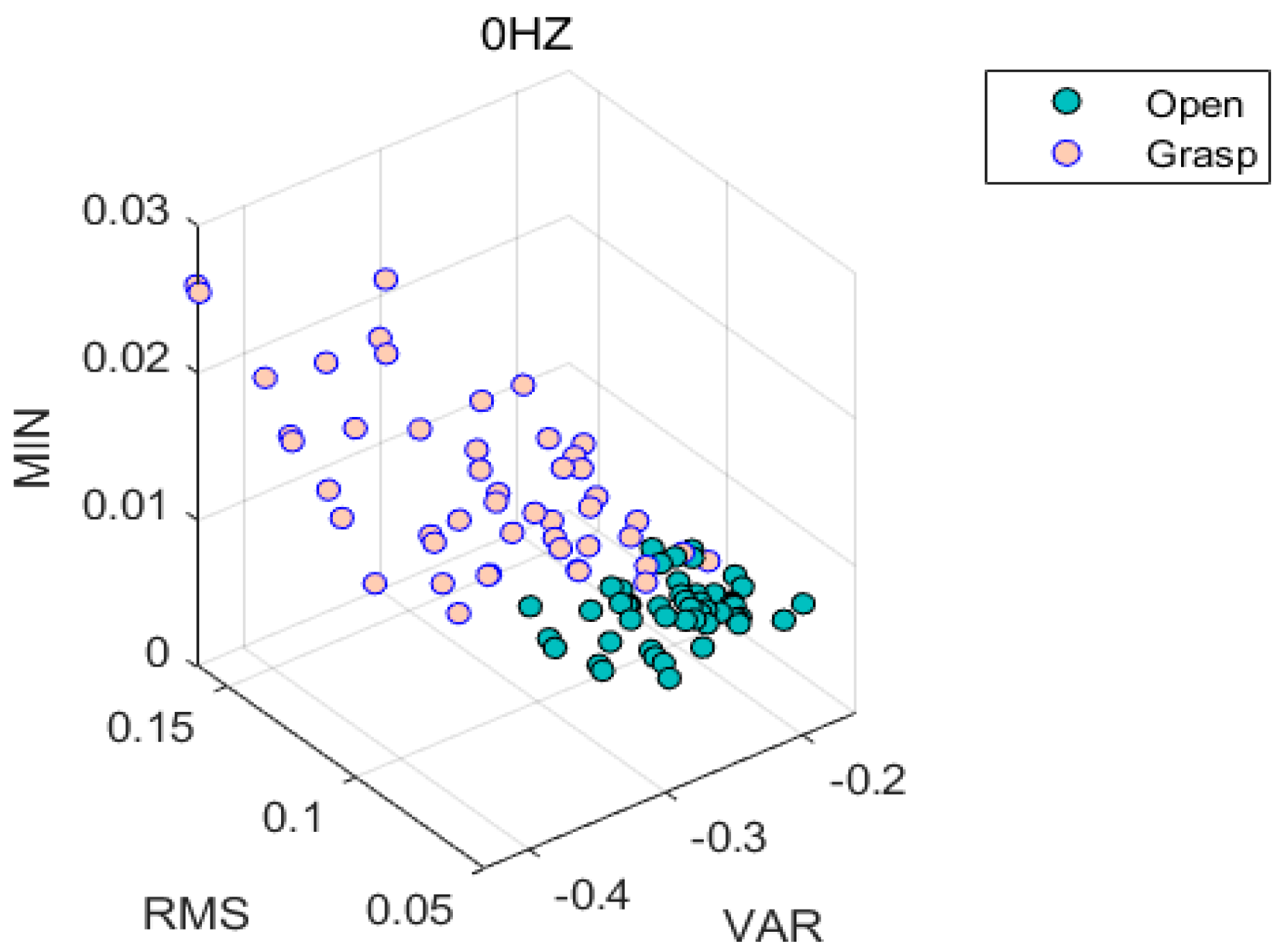
3.2. Feature Extraction
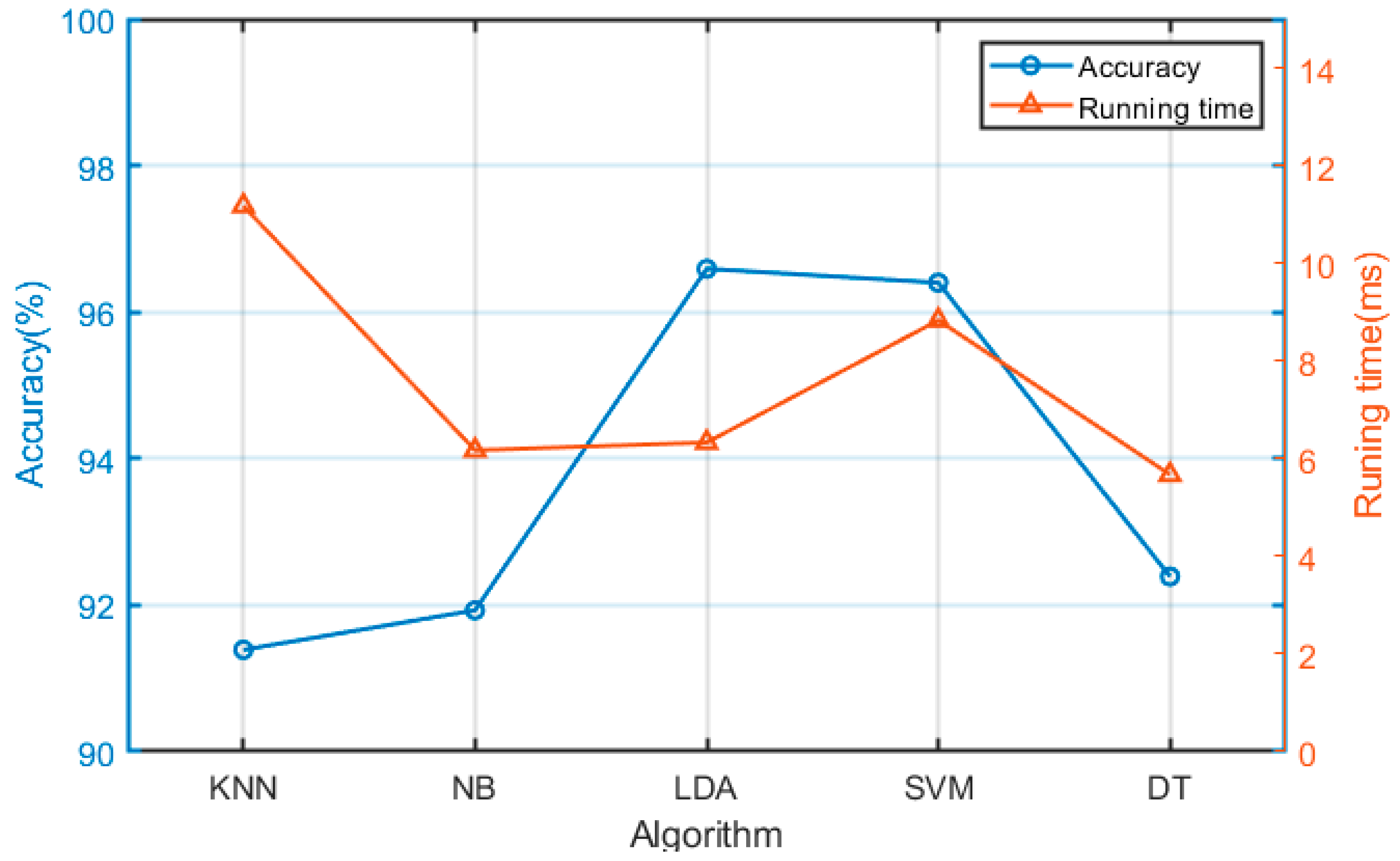
3.3. Feature Classification
- (a)
- Firstly, calculate the mean vector of each class using Equation (12):where ni is the number of samples of each class, and x denotes the original feature vectors of each class.
- (b)
- Secondly, calculate the mean of samples using Equation (13):where m is the total number of all classes.
- (c)
- Thirdly, calculated the inter-class divergence matrix and the in-class divergence matrix using Equations (14) and (15).Here, it is important to note that a weighted average is needed when calculating the total and , because the number of samples for each class may be different.
- (d)
- Finally, we can express the Fisher criterion in terms of and as:
4. Experiments Results
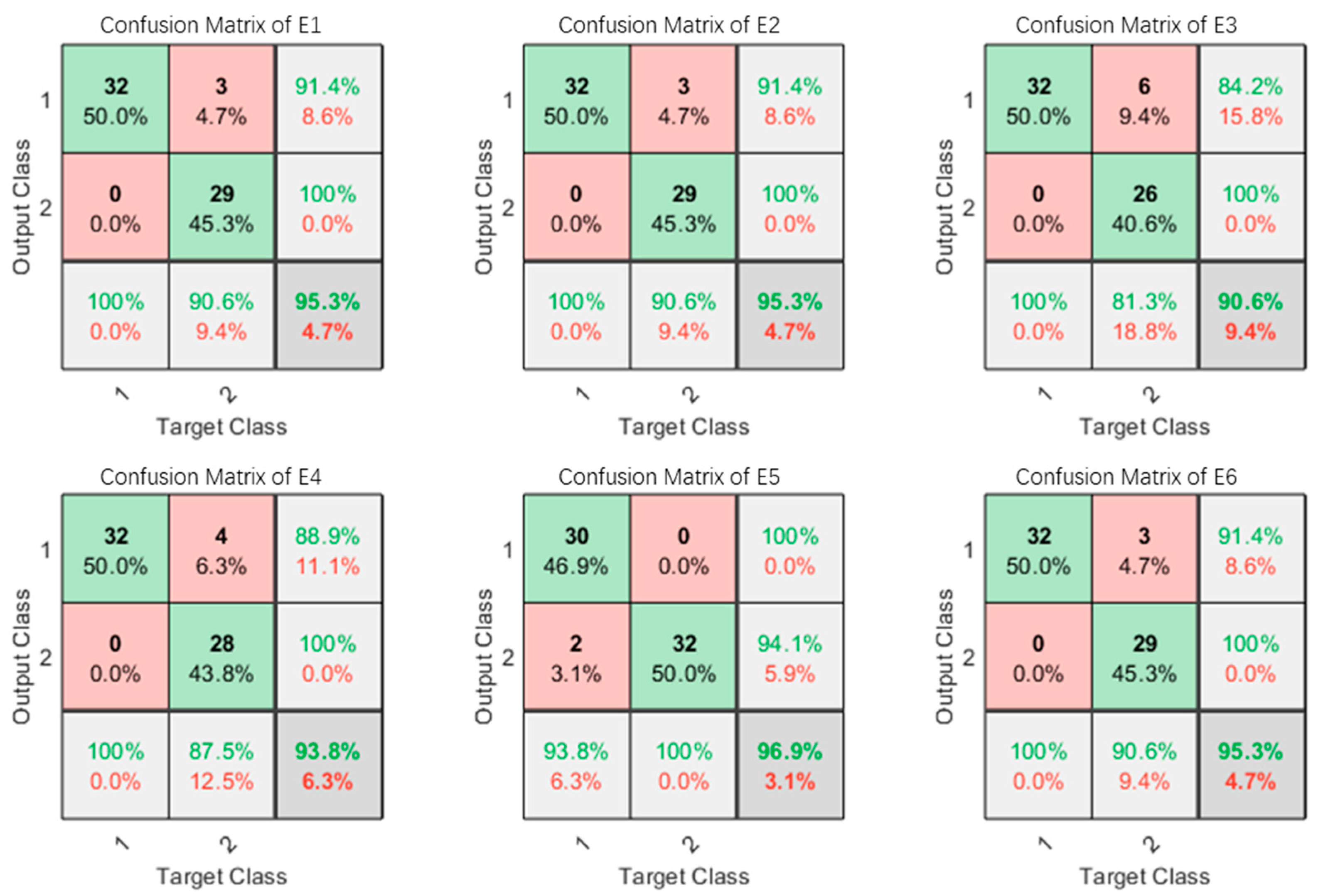
4.1. Intention Recognition Results
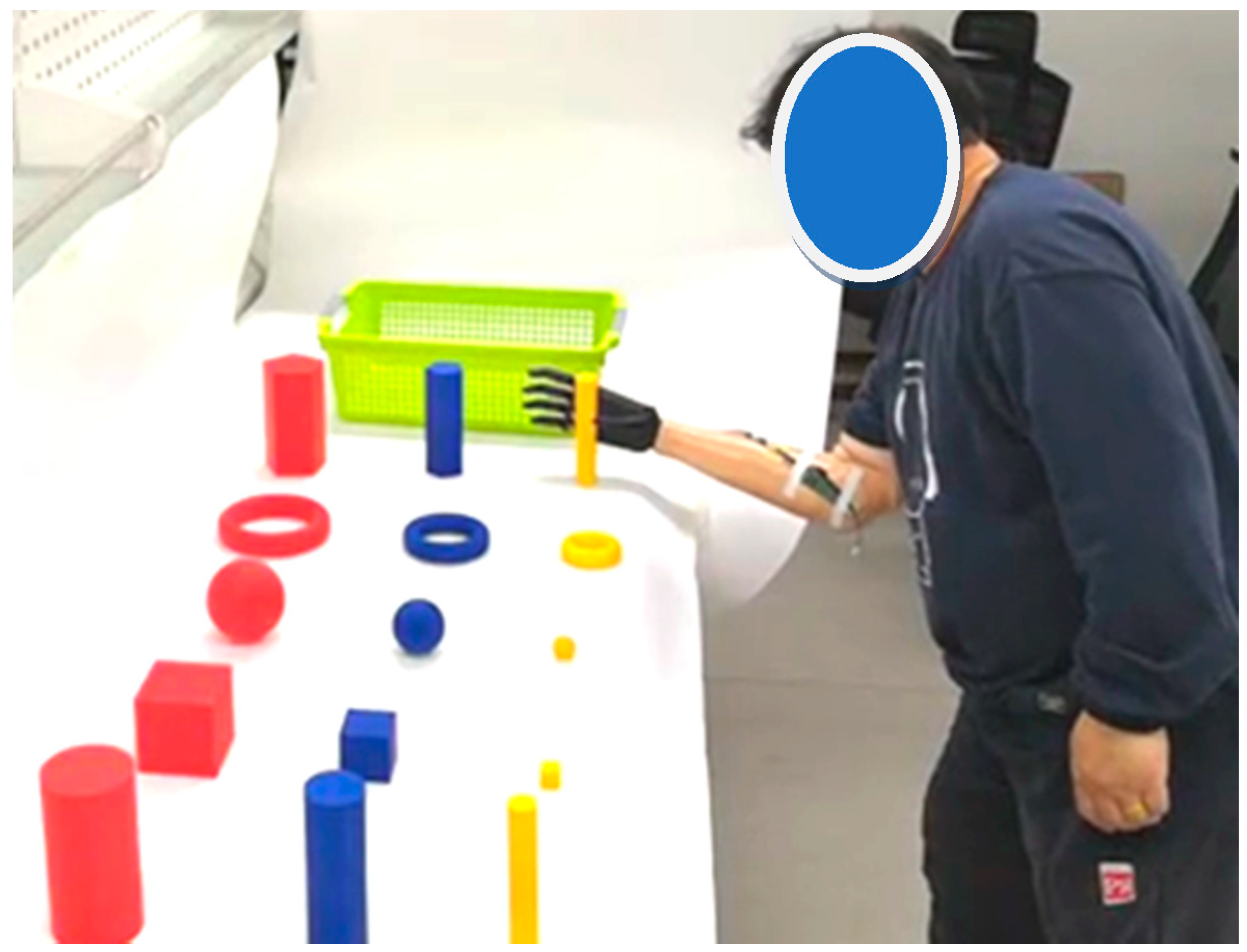
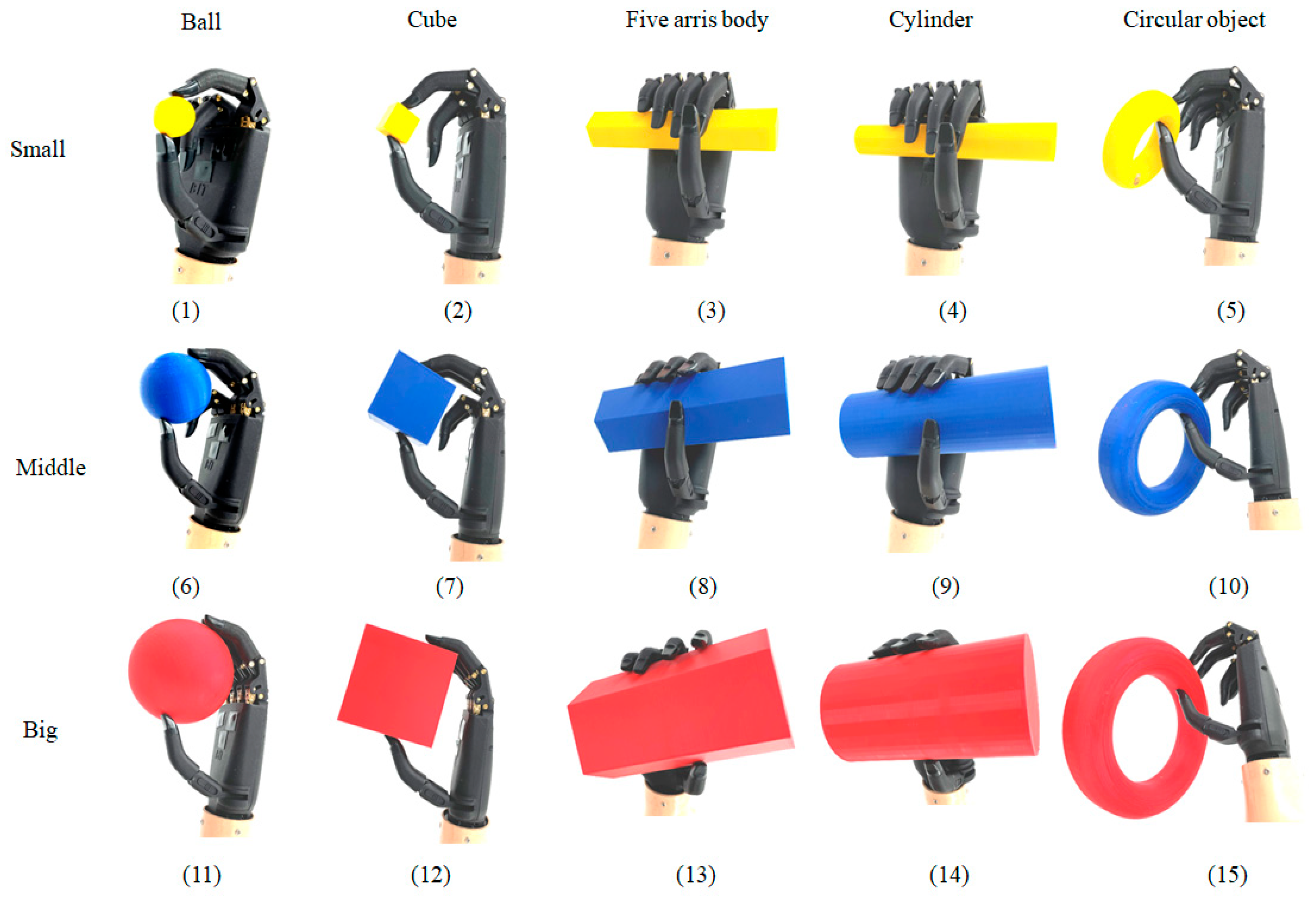
4.2. Grasp Test Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kyberd, P.J.; Light, C.; Chappell, P.H.; Nightingale, J.M.; Whatley, D.; Evans, M. The design of anthropomorphic prosthetic hands: A study of the Southampton Hand. Robotica 2001, 19, 593–600. [Google Scholar] [CrossRef]
- Dalley, S.A.; Wiste, T.E.; Withrow, T.J.; Goldfrab, M. Design of a Multifunctional Anthropomorphic Prosthetic Hand with Extrinsic Actuation. IEEE ASME Trans. Mechatron. 2009, 14, 699–706. [Google Scholar] [CrossRef]
- Connolly, C. Prosthetic hands from Touch Bionics. Ind. Robot 2008, 35, 290–293. [Google Scholar] [CrossRef]
- Okada, T. Computer control of multi-jointed finger system for precise object-handling. IEEE Trans. Syst. Man Cybern. 1982, 12, 289–299. [Google Scholar] [CrossRef]
- Salisbury, J.K.; Mason, M.T. Robot Hands and the Mechanics of Manipulation; MIT Press: Cambridge, MA, USA, 1985. [Google Scholar]
- Kochan, A. Shadow delivers first hand. Ind. Robot. Int. J. 2005, 32, 15–16. [Google Scholar] [CrossRef]
- Jacobsen, S.C.; Wood, J.E.; Knutti, D.F.; Biggers, K.B. The UTAH/MIT dextrous hand: Work in progress. Int. J. Robot. Res. 1984, 3, 21–50. [Google Scholar] [CrossRef]
- Iversen, E.; Sears, H.H.; Jacobsen, S.C. Artificial arms evolve from robots, or vice versa. IEEE Control Syst. Mag. 2005, 25, 16–18. [Google Scholar]
- Jacobsen, S.C. Design of the Utan/MIT Dextrous Gripper. In Proceedings of the 1986 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 7–10 April 1986; Volume 4, pp. 1520–1523. [Google Scholar]
- Nakano, Y.; Fujie, M.; Hosada, Y. Hitachi robot Hand. Robot. Age 1984, 6, 18–20. [Google Scholar]
- Tawfik, M.A.; Baqer, I.A.; Abdulsahib, A.D. Grasping Force Controlling by Slip Detection for Specific Artificial Hand (ottobock 8E37). Eng. Technol. J. 2018, 36, 979–984. [Google Scholar] [CrossRef]
- Chu, J.U.; Moon, I.; Lee, Y.J.; Kim, S.-K.; Mun, M.-S. A Supervised Feature-Projection-Based Real-Time EMG Pattern Recognition or Multifunction Myoelectric Hand Control. IEEE ASME Trans. Mechatron. 2007, 12, 282–290. [Google Scholar] [CrossRef]
- Nam, Y.; Koo, B.; Cichocki, A.; Choi, S. GOM-Face: GKP, EOG, and EMG-Based Multimodal Interface with Application to Humanoid Robot Control. IEEE Trans. Biomed. Eng. 2014, 61, 453–462. [Google Scholar] [CrossRef] [PubMed]
- Burgess-Limerick, R. Squat, stoop, or something in between? Int. J. Ind. Ergon. 2003, 31, 143–148. [Google Scholar] [CrossRef]
- Hsiang, S.M.; Brogmus, G.E.; Courtney, T.K. Low back pain (LBP) and lifting technique—A review. Int. J. Ind. Ergon. 1997, 19, 59–74. [Google Scholar] [CrossRef]
- Brad, S.; Sherry, S. The extraction of neural strategies from the surface EMG. J. Appl. Physiol. 2004, 96, 1486–1495. [Google Scholar]
- Scheme, E.J.; Englehart, K.B.; Hudgins, B.S. Selective Classification for Improved Robustness of Myoelectric Control Under Nonideal Conditions. IEEE Trans. Biomed. Eng. 2011, 58, 1698–1705. [Google Scholar] [CrossRef] [PubMed]
- Clancy, E.A.; Morin, E.L.; Merletti, R. Sampling, noise-reduction and amplitude estimation issues in surface electromyography. J. Electromyogr. Kinesiol. 2002, 12, 1–16. [Google Scholar] [CrossRef]
- Reaz, M.; Hussain, M.S.; Mohd-Yasin, F. Techniques of EMG signal analysis: Detection, processing, classification and applications. Biol. Proced. Online 2006, 8, 11–35. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shair, E.F.; Ahmad, S.A.; Marhaban, M.H.; Mohd Tamrin, S.B.; Abdullah, A.R. EMG Processing Based Measures of Fatigue Assessment during Manual Lifting. BioMed Res. Int. 2017, 2017, 3937254. [Google Scholar] [CrossRef] [PubMed]
- Nsugbe, E.; Phillips, C.; Fraser, M.; McIntosh, J. Gesture Recognition for Trans-humeral Prosthesis Control Using EMG and NIR. IET Cyber. Syst. Robot. 2020, 2, 122–131. [Google Scholar] [CrossRef]
- Phinyomark, A.; Hirunviriya, S.; Limsakul, C.; Phukpattaranont, P. Evaluation of EMG feature extraction for hand movement recognition based on Euclidean distance and standard deviation. In Proceedings of the International Conference on Electrical Engineering/Electronics Computer Telecommunications and Information Technology IEEE, Chiang Mai, Thailand, 19–21 May 2020. [Google Scholar]
- Wang, N.; Lao, K.; Zhang, X. Design and Myoelectric Control of an Anthropomorphic Prosthetic Hand. J. Bionic Eng. 2017, 14, 47–59. [Google Scholar] [CrossRef]
- Farina, D.; Lucas, M.-F.; Doncarli, C. Optimized wavelets for blind separation of non-stationnary surface myoelectric signals. IEEE Trans. Biomed. Eng. 2007, 55, 78–86. [Google Scholar] [CrossRef] [PubMed]
- Tkach, D.; Huang, H.; Kuiken, T.A. Study of stability of time-domain features for electromyographic pattern recognition. J. Neuroeng. Rehabil. 2010, 7, 21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Potluri, C.; Kumar, P.; Anugolu, M.; Urfer, A.; Chiu, S.; Subbaram Naidu, D.; Schoen, M.P. Frequency Domain Surface EMG Sensor Fusion for Estimating Finger Forces. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 5975–5978. [Google Scholar]
- Sapsanis, C.; Georgoulas, G.; Tzes, A. EMG Based Classification of Basic Hand Movements Based on Time-Frequency Features. In Proceedings of the 21st Mediterranean Conference on Control and Automation, Platanias, Greece, 25–28 June 2013. [Google Scholar]
- Hudgins, B.; Parker, P.; Scott, R.N. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.S.; Choi, H.H.; Moon, C.S.; Mun, C.W. Comparison of k-nearest neighbor, quadratic discriminant and linear discriminant analysis in classification of electromyogram signals based on the wrist-motion directions. Curr. Appl. Phys. 2011, 11, 740–745. [Google Scholar] [CrossRef]
- Zecca, M.; Micera, S.; Carrozza, M.C.; Dario, P. Control of multifunctional prosthetic hands by processing the electromyographic signal. Crit. Rev. Biomed. Eng. 2002, 30, 459–485. [Google Scholar] [CrossRef] [Green Version]
- Oskoei, M.A.; Hu, H. Support Vector Machine-Based Classification Scheme for Myoelectric Control Applied to Upper Limb. IEEE Trans. Biomed. Eng. 2008, 55, 1956–1965. [Google Scholar] [CrossRef]
- Mane, S.M.; Kambli, R.A.; Kazi, F.S.; Singh, N.M. Hand Motion Recognition from Single Channel Surface EMG Using Wavelet & Artificial Neural Network. Procedia Comput. Sci. 2015, 49, 58–65. [Google Scholar]
- Zhang, H.; Zhao, Y.; Yao, F.; Xu, L.; Shang, P.; Li, G. An adaptation strategy of using LDA classifier for EMG pattern recognition. In Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 4267–4270. [Google Scholar]
- Xing, K.; Yang, P.; Huang, J.; Wang, J.; Zhu, Q. A real-time EMG pattern recognition method for virtual myoelectric hand control. Neurocomputing 2014, 136, 345–355. [Google Scholar] [CrossRef]
- Raurale, S.A.; Chatur, P.N. Identification of Real-Time Active Hand Movements EMG Signals for Control of Prosthesis Robotic Hand. In Proceedings of the International Conference on Computation of Power, Chennai, India, 16–17 April 2014. [Google Scholar]
- Zhang, D.; Zhao, X.; Han, J.; Zhao, Y. A comparative study on PCA and LDA based EMG pattern recognition for anthropomorphic robotic hand. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Antuvan, C.W.; Masia, L. An LDA-Based Approach for Real-Time Simultaneous Classification of Movements Using Surface Electromyography. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 552–561. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accuracy (%) | S1 | S2 | S3 | S4 | S5 | S6 | Average |
|---|---|---|---|---|---|---|---|
| NB | 87.5 | 95.31 | 84.38 | 93.75 | 98.44 | 92.19 | 91.93 |
| SVM | 95.31 | 96.88 | 96.13 | 96.88 | 97.88 | 95.31 | 96.40 |
| DT | 87.94 | 92.19 | 91.38 | 93.75 | 98.44 | 90.63 | 92.39 |
| KNN | 86.94 | 92.19 | 86.39 | 92.19 | 98.44 | 92.19 | 91.39 |
| LDA | 94.31 | 97.31 | 97.13 | 97.43 | 96.92 | 96.45 | 96.59 |
| Shape | Size | Success Rate | Time-Consuming(s) |
|---|---|---|---|
| Sphere | Small | 90.74% | 4.84 |
| Middle | 96.30% | 3.94 | |
| Big | 100.00% | 4.08 | |
| Cube | Small | 98.15% | 3.91 |
| Middle | 100.00% | 3.91 | |
| Big | 100.00% | 3.73 | |
| Torus | Small | 96.30% | 4.36 |
| Middle | 98.15% | 4.20 | |
| Big | 100.00% | 4.21 | |
| Pentagonal Column | Small | 92.59% | 5.11 |
| Middle | 98.15% | 4.31 | |
| Big | 100.00% | 4.33 | |
| Cylinder | Small | 90.74% | 5.08 |
| Middle | 96.30% | 4.06 | |
| Big | 100.00% | 4.16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Tian, Y.; She, H.; Jiang, Y.; Yokoi, H.; Liu, Y. Design of an Effective Prosthetic Hand System for Adaptive Grasping with the Control of Myoelectric Pattern Recognition Approach. Micromachines 2022, 13, 219. https://doi.org/10.3390/mi13020219
Wang Y, Tian Y, She H, Jiang Y, Yokoi H, Liu Y. Design of an Effective Prosthetic Hand System for Adaptive Grasping with the Control of Myoelectric Pattern Recognition Approach. Micromachines. 2022; 13(2):219. https://doi.org/10.3390/mi13020219
Chicago/Turabian StyleWang, Yanchao, Ye Tian, Haotian She, Yinlai Jiang, Hiroshi Yokoi, and Yunhui Liu. 2022. "Design of an Effective Prosthetic Hand System for Adaptive Grasping with the Control of Myoelectric Pattern Recognition Approach" Micromachines 13, no. 2: 219. https://doi.org/10.3390/mi13020219
APA StyleWang, Y., Tian, Y., She, H., Jiang, Y., Yokoi, H., & Liu, Y. (2022). Design of an Effective Prosthetic Hand System for Adaptive Grasping with the Control of Myoelectric Pattern Recognition Approach. Micromachines, 13(2), 219. https://doi.org/10.3390/mi13020219